S-ar putea să vă placă și
- Informe Control de Un Motor MicrocontroladoresDocument4 paginiInforme Control de Un Motor MicrocontroladoresJoselitoParionaÎncă nu există evaluări
- TAREA 1.-Desarrollo Del Acta de Constitución Del ProyectoDocument3 paginiTAREA 1.-Desarrollo Del Acta de Constitución Del ProyectoJoselitoParionaÎncă nu există evaluări
- Marco TeoricoDocument7 paginiMarco TeoricoJoselitoParionaÎncă nu există evaluări
- Semana 02 Aceites HidráulicosDocument51 paginiSemana 02 Aceites HidráulicosJoselitoPariona100% (1)
- IE 313 Electronica IDocument2 paginiIE 313 Electronica IJoselitoParionaÎncă nu există evaluări
- Semana 1 Practica Dirigida Formulacion de Modelos de Investigación de OperacionesDocument3 paginiSemana 1 Practica Dirigida Formulacion de Modelos de Investigación de OperacionesJoselitoParionaÎncă nu există evaluări
- Semana 7 Practica Dirigida Problemas de TransporteDocument3 paginiSemana 7 Practica Dirigida Problemas de TransporteJoselitoParionaÎncă nu există evaluări
- GUÍA PRÁCTICA 02-Elevador HidráulicoDocument3 paginiGUÍA PRÁCTICA 02-Elevador HidráulicoJoselitoParionaÎncă nu există evaluări
- Semana 5 Practica Dirigida Programación LinealDocument3 paginiSemana 5 Practica Dirigida Programación LinealJoselitoParionaÎncă nu există evaluări
- Semana 1 Practica Dirigida Formulacion de Modelos de Investigación de OperacionesDocument3 paginiSemana 1 Practica Dirigida Formulacion de Modelos de Investigación de OperacionesJoselitoParionaÎncă nu există evaluări
- GUÍA PRÁCTICA 03-Fuerza de EmpujeDocument2 paginiGUÍA PRÁCTICA 03-Fuerza de EmpujeJoselitoParionaÎncă nu există evaluări
- 05 Las Leyes LógicasDocument3 pagini05 Las Leyes LógicasJoselitoParionaÎncă nu există evaluări
- Practica Calificada Partida DobleDocument2 paginiPractica Calificada Partida DobleJoselitoPariona100% (1)
- Algoritmo de PetersonDocument4 paginiAlgoritmo de PetersonAgrelasÎncă nu există evaluări
- Cómo Leer Las Deudas en La Página ABCDocument8 paginiCómo Leer Las Deudas en La Página ABCMarcelo MesoÎncă nu există evaluări
- La ComputadoraDocument6 paginiLa ComputadoraMarllery MoncadaÎncă nu există evaluări
- CONTROL2 Iacc Programacion de Computadores IDocument3 paginiCONTROL2 Iacc Programacion de Computadores IJUANÎncă nu există evaluări
- Tercera EntregaDocument3 paginiTercera EntregaLUIS QUINTERO100% (1)
- Omron Network Configurator, PLC CJ y Ethernet - Ip - WM Spain - Weidmã Ller WikiDocument7 paginiOmron Network Configurator, PLC CJ y Ethernet - Ip - WM Spain - Weidmã Ller WikiJose Gabriel Aguirre AndradeÎncă nu există evaluări
- AWS - Guía de Referencia Del Ciclo de Vida de Los DatosDocument56 paginiAWS - Guía de Referencia Del Ciclo de Vida de Los DatosgiobratoÎncă nu există evaluări
- Cuadro Comparativo Ventajas y DesventajasDocument4 paginiCuadro Comparativo Ventajas y DesventajasDavid Nuñez Herrera100% (1)
- Sobre El Algoritmo RsaDocument13 paginiSobre El Algoritmo RsaRensso ChungÎncă nu există evaluări
- proyecto-II Año-JavaDocument1 paginăproyecto-II Año-JavaArelis Valdés MeechenÎncă nu există evaluări
- PICkit2 PICkit3 CharlaDocument31 paginiPICkit2 PICkit3 Charlamarquitos550b100% (1)
- Sexta Generación de ComputadorasDocument4 paginiSexta Generación de ComputadorasAndres F. Daguer PerezÎncă nu există evaluări
- TThread IDocument11 paginiTThread ILuis PrietoÎncă nu există evaluări
- Usando OpenSSL en El Mundo RealDocument15 paginiUsando OpenSSL en El Mundo RealClaudia RazoÎncă nu există evaluări
- Resumen UmlDocument8 paginiResumen UmlParedes Rios EdmundoÎncă nu există evaluări
- Modelo de RequisitosDocument18 paginiModelo de RequisitosPablo JobsÎncă nu există evaluări
- PLAN CURRICULAR ANUAL Desarrollo y Evaluacion de Aplicaciones InformaticasDocument4 paginiPLAN CURRICULAR ANUAL Desarrollo y Evaluacion de Aplicaciones Informaticasmarianita HuacaÎncă nu există evaluări
- Taller de Base de Datos - ISC Unidad IIIDocument32 paginiTaller de Base de Datos - ISC Unidad IIIMario Hernandez SantosÎncă nu există evaluări
- Método de Ordenamiento Shell SortDocument2 paginiMétodo de Ordenamiento Shell SortAlex Helder HuancaraÎncă nu există evaluări
- Teoria de ArbolesDocument6 paginiTeoria de ArbolesCristoffer ArevaloÎncă nu există evaluări
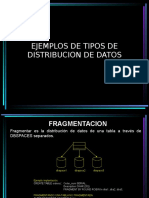
- 04 - Ejemplos FragmentacionDocument6 pagini04 - Ejemplos Fragmentaciongon2479Încă nu există evaluări
- Transacciones y RecuperacionDocument5 paginiTransacciones y RecuperacionJm MartinezÎncă nu există evaluări
- Dni RucDocument4 paginiDni RucFernando SandovalÎncă nu există evaluări
- 5 Herramientas para Hacer Copias de Seguridad Con LinuxDocument2 pagini5 Herramientas para Hacer Copias de Seguridad Con LinuxvcfagundoÎncă nu există evaluări
- Ensamblador Arreglos Final4Document35 paginiEnsamblador Arreglos Final4ShiLd DN0% (1)
- Cuál Es La Diferencia Entre El SQL y PLDocument3 paginiCuál Es La Diferencia Entre El SQL y PLEver Adolfo AguirreÎncă nu există evaluări
- Requisitos Funcionales y No FuncionalesDocument21 paginiRequisitos Funcionales y No FuncionalesFELIX LISANDRO DUARTE100% (2)
- Tablas HashDocument2 paginiTablas HashKimy Jessahel100% (1)
- AMEFDocument10 paginiAMEFViriidianaa 'RiiveraaÎncă nu există evaluări
- Computer Hoy Extra N°28 2019 PDFDocument132 paginiComputer Hoy Extra N°28 2019 PDFdocomezÎncă nu există evaluări