S-ar putea să vă placă și
- Mcgill: Ecse 461 - Electric MachineryDocument1 paginăMcgill: Ecse 461 - Electric MachineryChirag SoodÎncă nu există evaluări
- 3.2 Electric Motors - Revised (Table Format)Document8 pagini3.2 Electric Motors - Revised (Table Format)Sumit AgrawalÎncă nu există evaluări
- 9A02308 Electrical Machines - IDocument4 pagini9A02308 Electrical Machines - IsivabharathamurthyÎncă nu există evaluări
- Tutorial 1 & 2Document2 paginiTutorial 1 & 2lucasÎncă nu există evaluări
- EM II ProblemsDocument4 paginiEM II ProblemsTony StarkÎncă nu există evaluări
- Assignment IDocument4 paginiAssignment Iamith gupta0% (1)
- Dcd-I HVDCDocument3 paginiDcd-I HVDCsatya_vanapalli3422Încă nu există evaluări
- DC Motor Assignment QuestionsDocument6 paginiDC Motor Assignment QuestionsSaurav SomeshÎncă nu există evaluări
- Bukan Apa ApaDocument7 paginiBukan Apa ApaBeelqis FauziyahÎncă nu există evaluări
- Islamic University of Technology (Iut) Organisation of Islamic Cooperation (Oic)Document4 paginiIslamic University of Technology (Iut) Organisation of Islamic Cooperation (Oic)Ashik AhmedÎncă nu există evaluări
- Practice ProblemsDocument4 paginiPractice Problemsdragon_warrior112456804Încă nu există evaluări
- Power Electronics and Electrical Drives Mid-Semester PaperDocument2 paginiPower Electronics and Electrical Drives Mid-Semester PaperU20EE051 DEEPTI BOSE SVNITÎncă nu există evaluări
- EEE 43 Final 2017Document3 paginiEEE 43 Final 2017Emman Joshua BustoÎncă nu există evaluări
- DC MotorGeneratorDocument32 paginiDC MotorGeneratorna zafiraÎncă nu există evaluări
- Sheet2 SolutionsDocument32 paginiSheet2 Solutionsmahmoudbadran901Încă nu există evaluări
- WWW - Manaresults.Co - In: B.Tech III Year II Semester (R13) Supplementary Examinations December 2016Document2 paginiWWW - Manaresults.Co - In: B.Tech III Year II Semester (R13) Supplementary Examinations December 2016Kunte Vikas RaoÎncă nu există evaluări
- EE664 Prob Set1Document3 paginiEE664 Prob Set1Shubham YadavÎncă nu există evaluări
- Universal Motor SheetDocument2 paginiUniversal Motor SheetAhmed RefaatÎncă nu există evaluări
- Electric Motors: Objective Type Questions and AnswersDocument10 paginiElectric Motors: Objective Type Questions and AnswersBharatiyulamÎncă nu există evaluări
- Machines 2 Tutorial 2 2015Document6 paginiMachines 2 Tutorial 2 2015ashauniÎncă nu există evaluări
- Example 3: A 7.5-hp 120-V Series DC Motor Has An Armature Resistance of 0.2 Ohm and ADocument3 paginiExample 3: A 7.5-hp 120-V Series DC Motor Has An Armature Resistance of 0.2 Ohm and Ahakkı_aÎncă nu există evaluări
- Super 30 EM-1 - QBDocument3 paginiSuper 30 EM-1 - QBmr.kaustubh1362Încă nu există evaluări
- AC CIRCUITS AND MACHINESDocument7 paginiAC CIRCUITS AND MACHINESpigilanteÎncă nu există evaluări
- AssignmentDocument2 paginiAssignmenteyu ham studioÎncă nu există evaluări
- Test2see3433 QuestionDocument2 paginiTest2see3433 QuestionFizah Abdul RahmanÎncă nu există evaluări
- Synchronous Machine ProblemsDocument5 paginiSynchronous Machine Problemsbhuvana71Încă nu există evaluări
- The Open University of Sri Lanka Ecx4238 - Electrical Machines Academic Year - 2010 Assignment # 2Document2 paginiThe Open University of Sri Lanka Ecx4238 - Electrical Machines Academic Year - 2010 Assignment # 2Sanjaya SrinathÎncă nu există evaluări
- Converter Fed DC Motors Speed ControlDocument7 paginiConverter Fed DC Motors Speed ControlVempalle RafiÎncă nu există evaluări
- EE2006D Assignments 1-2 2020Document2 paginiEE2006D Assignments 1-2 2020vinodÎncă nu există evaluări
- DCM-questionsDocument2 paginiDCM-questionsljyandrew122122Încă nu există evaluări
- Group AssignmentDocument1 paginăGroup AssignmentMulugetaÎncă nu există evaluări
- Tutorial DC MachinesDocument2 paginiTutorial DC MachinesLucas LeeÎncă nu există evaluări
- Tutorial DC MachinesDocument2 paginiTutorial DC MachinesLucas LeeÎncă nu există evaluări
- IDA - QuesbankDocument10 paginiIDA - QuesbankKavitha KaviÎncă nu există evaluări
- AC Machines Course Outcomes and UnitsDocument4 paginiAC Machines Course Outcomes and Unitspramana_gmritÎncă nu există evaluări
- ECE 424 - Assign4Document2 paginiECE 424 - Assign4Amos AtandiÎncă nu există evaluări
- Assignment IDocument1 paginăAssignment Ianon_319514091Încă nu există evaluări
- DC Machines Exam QuestionsDocument5 paginiDC Machines Exam QuestionsGeethika VarmaÎncă nu există evaluări
- MachineDocument13 paginiMachineashu0990% (2)
- ET Tut7 AUT2017-18 PDFDocument3 paginiET Tut7 AUT2017-18 PDFMoulindu KunduÎncă nu există evaluări
- Assignment 2 DC MachinesDocument2 paginiAssignment 2 DC MachinesBRUNO TUMBANAÎncă nu există evaluări
- Written QuestionsDocument18 paginiWritten QuestionsGokul RajÎncă nu există evaluări
- 5 Em-1Document8 pagini5 Em-129viswa12Încă nu există evaluări
- ECSE 461 - Synchronous Machine Operating ModesDocument1 paginăECSE 461 - Synchronous Machine Operating ModesChirag SoodÎncă nu există evaluări
- The University of New South Wales Final Examination JUNE 2005Document5 paginiThe University of New South Wales Final Examination JUNE 2005Andrew XieÎncă nu există evaluări
- Indian Institute of Engineering Science and Technology, Shibpur Department of Electrical EngineeringDocument4 paginiIndian Institute of Engineering Science and Technology, Shibpur Department of Electrical EngineeringKool PrashantÎncă nu există evaluări
- EE Exam Questions on DC MachinesDocument4 paginiEE Exam Questions on DC Machineshajarilal meenaÎncă nu există evaluări
- Narayana Engineering College Power Semiconductor Drives SubjectiveDocument7 paginiNarayana Engineering College Power Semiconductor Drives SubjectiveSaravanan T YÎncă nu există evaluări
- DC MachinesDocument2 paginiDC MachinesZia AzamÎncă nu există evaluări
- Electrical Machines - IDocument24 paginiElectrical Machines - IEmil Alturk0% (1)
- Solving DC Motors Simple Torque Problems PDFDocument8 paginiSolving DC Motors Simple Torque Problems PDFRv EstebanÎncă nu există evaluări
- Solving DC Motors Simple Torque Problems PDFDocument8 paginiSolving DC Motors Simple Torque Problems PDFRv EstebanÎncă nu există evaluări
- Assignment (ELE3307)Document3 paginiAssignment (ELE3307)●●●●●●●1Încă nu există evaluări
- Electric Drive - Mid Semsester Examination - 05 - October 2020Document3 paginiElectric Drive - Mid Semsester Examination - 05 - October 2020Tushar SanwareyÎncă nu există evaluări
- Assignmentsolutionselected 150208132823 Conversion Gate02Document30 paginiAssignmentsolutionselected 150208132823 Conversion Gate02apelokayaÎncă nu există evaluări
- RME20001 Tutorial 3Document2 paginiRME20001 Tutorial 3Livan IvannaÎncă nu există evaluări
- EEE363 (Exp 10) Study of The Operating Characteristics and Torque Speed Relationship of Capacitor Start Motor & Run MotorDocument8 paginiEEE363 (Exp 10) Study of The Operating Characteristics and Torque Speed Relationship of Capacitor Start Motor & Run Motorsalad.ass420420Încă nu există evaluări
- Variable Speed AC Drives with Inverter Output FiltersDe la EverandVariable Speed AC Drives with Inverter Output FiltersÎncă nu există evaluări
- Electrical Machines: Lecture Notes for Electrical Machines CourseDe la EverandElectrical Machines: Lecture Notes for Electrical Machines CourseÎncă nu există evaluări
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetDe la EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetÎncă nu există evaluări
- ECSE461 F16 Tutorial10 Problems 07nov16Document1 paginăECSE461 F16 Tutorial10 Problems 07nov16mfuzdnldÎncă nu există evaluări
- ECSE461 Assign5 18nov16 PDFDocument1 paginăECSE461 Assign5 18nov16 PDFmfuzdnldÎncă nu există evaluări
- AJAN AHMED Research Log 1Document2 paginiAJAN AHMED Research Log 1mfuzdnldÎncă nu există evaluări
- F15 L10 PDFDocument3 paginiF15 L10 PDFmfuzdnldÎncă nu există evaluări
- F15 L10 PDFDocument3 paginiF15 L10 PDFmfuzdnldÎncă nu există evaluări
- Applied Mechanics of Solids (A.f. Bower) Chapter 2 - Governing Eqs - 2Document13 paginiApplied Mechanics of Solids (A.f. Bower) Chapter 2 - Governing Eqs - 2mfuzdnldÎncă nu există evaluări
- Project FeaDocument3 paginiProject FeamfuzdnldÎncă nu există evaluări
- Math 317 Assignment 2 SolutionsDocument1 paginăMath 317 Assignment 2 SolutionsmfuzdnldÎncă nu există evaluări
- SK-Synthetic Division - How To Factorize RapidlyDocument2 paginiSK-Synthetic Division - How To Factorize RapidlymfuzdnldÎncă nu există evaluări
- CHEE220 Heat Engine Lab Jan2014Document4 paginiCHEE220 Heat Engine Lab Jan2014mfuzdnldÎncă nu există evaluări
- Guass Quadrature Rule of IntegrationDocument21 paginiGuass Quadrature Rule of IntegrationmfuzdnldÎncă nu există evaluări
- ORdinary Differential EquationDocument16 paginiORdinary Differential EquationmfuzdnldÎncă nu există evaluări
- Configured drive detailsDocument12 paginiConfigured drive detailsFurkan YAŞARÎncă nu există evaluări
- NOVIKONTAS GMDSS TEST Questions + AnswersDocument7 paginiNOVIKONTAS GMDSS TEST Questions + Answershendra100% (3)
- Samsung ln23 26 32 40 r81bx Chassis GBP 23 26 32 40 MlaDocument132 paginiSamsung ln23 26 32 40 r81bx Chassis GBP 23 26 32 40 MlaDaniel Norberto DemariaÎncă nu există evaluări
- Fisher Man Rescue SystemDocument16 paginiFisher Man Rescue SystemHelloprojectÎncă nu există evaluări
- Western Underground - HV and Ehv Cables-CmeDocument38 paginiWestern Underground - HV and Ehv Cables-CmeA. Hassan100% (2)
- Verification Methodology Manual For Low Power (VMM-LP)Document76 paginiVerification Methodology Manual For Low Power (VMM-LP)Thi NguyenÎncă nu există evaluări
- FB 1100 ManualDocument37 paginiFB 1100 ManualJuan David IdarragaÎncă nu există evaluări
- 0186660sby-E Nexus Lts 200aDocument2 pagini0186660sby-E Nexus Lts 200aRabzyyÎncă nu există evaluări
- 30gx PDFDocument36 pagini30gx PDFVinod NairÎncă nu există evaluări
- Mems and Nanotechnology 2Document12 paginiMems and Nanotechnology 2Sai Krishna100% (1)
- MINI ES P30B3 E R3 Installation ManualV1.1(一般)Document47 paginiMINI ES P30B3 E R3 Installation ManualV1.1(一般)elisa_10Încă nu există evaluări
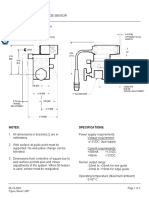
- Installation of the SE-26A Line Guide SensorDocument2 paginiInstallation of the SE-26A Line Guide SensorDeniMestiWidiantoÎncă nu există evaluări
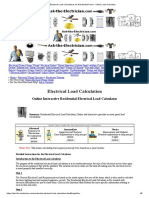
- Electrical Load Calculations For Residential Panel - Online Load CalculatorDocument8 paginiElectrical Load Calculations For Residential Panel - Online Load CalculatorTabrez AlamÎncă nu există evaluări
- VIZIOTRAININGGNPSC10Document122 paginiVIZIOTRAININGGNPSC10slowend100% (1)
- Advanced Power Electronics Corp.: DescriptionDocument6 paginiAdvanced Power Electronics Corp.: DescriptionMaugrys CastilloÎncă nu există evaluări
- Bocoat Catarpilla 242DDocument4 paginiBocoat Catarpilla 242DVictorEnriqueLopezPedrozaÎncă nu există evaluări
- An725 MaximDocument9 paginiAn725 MaximJavierÎncă nu există evaluări
- 012 Fire Alarm Systems A Reference ManualDocument359 pagini012 Fire Alarm Systems A Reference ManualBố Đăng Khánh100% (1)
- 3 CurrentElectricity UNACADEMY-FINALDocument59 pagini3 CurrentElectricity UNACADEMY-FINALAaryan KeshanÎncă nu există evaluări
- EU Declaration of Conformity: XFP Analogue Addressable Fire PanelsDocument1 paginăEU Declaration of Conformity: XFP Analogue Addressable Fire PanelsAdrian SudituÎncă nu există evaluări
- Coolmay VFD CM520 PDFDocument114 paginiCoolmay VFD CM520 PDFzanati abdelhakÎncă nu există evaluări
- LEMDDocument1 paginăLEMDRam PmvÎncă nu există evaluări
- Free Energy Ws John BediniDocument4 paginiFree Energy Ws John Bedinigui9871Încă nu există evaluări
- ISF2 Catalog PDFDocument8 paginiISF2 Catalog PDFbdikicÎncă nu există evaluări
- BDA 30703 Sem 1 1213 PDFDocument7 paginiBDA 30703 Sem 1 1213 PDFJevine LaiÎncă nu există evaluări
- CompactRIO CRIO-FRC 8 SlotDocument25 paginiCompactRIO CRIO-FRC 8 SlotHieu LEÎncă nu există evaluări
- tcp54vt25 PDFDocument144 paginitcp54vt25 PDFJay HunterÎncă nu există evaluări
- Install DL850 sensor in DOLOG tankDocument12 paginiInstall DL850 sensor in DOLOG tankAdi PrasetyoÎncă nu există evaluări
- Misys Job Notification Form - PECDocument3 paginiMisys Job Notification Form - PECAlokik Bhasin0% (1)
- Fokker 50-Electrical System PDFDocument33 paginiFokker 50-Electrical System PDFRichard R M ThodéÎncă nu există evaluări