Documente Academic
Documente Profesional
Documente Cultură
Leccion3 Dinámica. Estabilidad v6
Încărcat de
saikandreaDrepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Leccion3 Dinámica. Estabilidad v6
Încărcat de
saikandreaDrepturi de autor:
Formate disponibile
Dpto.
ArquitecturadeComputadoresyAutomtica
FacultaddeCienciasFsicas
UniversidadComplutense
SistemasDinmicosyRealimentacin
Tema3.Comportamientodinmico.
Estabilidad
ControldeSistemas
3.
3.1
ComportamientoDinmico.Estabilidad..................................................................3
Puntodeequilibrio...................................................................................................3
3.1.1
Cicloslmite......................................................................................................5
3.1.2
Movimientonominal........................................................................................7
3.1.3
Puntosdeequilibrioensistemaslineales........................................................8
3.2
Linealizacinentornoaunpuntodeequilibrio....................................................10
3.3
EstabilidadeInestabilidad.....................................................................................13
3.3.1
Estabilidaddesistemaslineales.....................................................................15
3.4
Anlisisdelaestabilidadporaproximacinlineal.................................................18
3.5
Anlisisdeestabilidaddesistemasnolineales......................................................20
3.5.1
Aplicacinasistemaslineales........................................................................25
3.5.2
PrincipiodeInvarianzadeKrasovskiLasalle..................................................26
3.6
EjemplodeusodelafuncindeLiapunovparadisearsistemasdecontrol.......28
3.7
Problemas..............................................................................................................31
FacultaddeCienciasFsicasUCM
SistemasDinmicos.Estabilidad
3. ComportamientoDinmico.Estabilidad
La estabilidad es un concepto clave de los sistemas dinmicos. Ligado al concepto de
estabilidad est el de punto de equilibrio o puntos estacionarios. En esta leccin
presentamoslasnocionesbsicasdeestabilidadylasherramientasfundamentalesparasu
anlisis.
3.1 Puntodeequilibrio
Enunsistemadinmico
x f (x, u)
y g ( x, u )
(1)
sedenominanpuntosdeequilibrioopuntosestacionariosaaquellosvaloresdelvectorde
estadoydelvectordecontrolquehacenqueelsistemapermanezcaenelmismoestadosi
el vector de control no cambia, en cuyo caso tampoco cambia el vector de medida. Si el
vector de estado permanece constante, xe, para una entrada de control constante, ue,
entoncessuderivadaesnula, x e 0 ,porloqueenunpuntodeequilibrioseverifica:
x 0 f (xe , ue )
(2)
(3)
Lasalidaenelpuntodeequilibriotomarelvalor
y e g (xe , ue )
Consideramosahoraunsistemaautnomonolinealdescritoporlaecuacindeestado
x (t ) f (x(t))
(4)
Corresponde a un sistema sin entrada de control, y tambin sirve para representar a
sistemasdecontroldelaforma
x (t ) f ( x(t), u(t))
dondesesuponequeelvectordecontrolesunafuncindelvectordeestado
u(t ) k (x(t))
demodoqueladinmicaenlazocerradotomalaforma
J.MdelaCruz
x (t ) f ( x(t), k ( x(t))
ControldeSistemas
u(t)
f(x(t),u(t))
x(t)
K(x(t))
Figura1.Sistemarealimentado
Enestecasounestadoxeesunpuntooestadodeequilibriodelsistemasicumple
x (t ) 0 f ( x e ) .
(5)
Unavezqueunsistemaalcanzaunpuntodeequilibriopermaneceenlentodoinstante
detiempoposterior:sienunpuntoelvectorvelocidadescero,unavezalcanzadonose
muevedel.
Desdeunpuntodevistadecontrol,lospuntosdeequilibriojueganunpapelfundamental
yaquerepresentancondicionesdeoperacinconstantes.Unsistemadinmicopuedetener
ninguno,unoomspuntosdeequilibrio.
Ejemplo1:Ecuacindelpndulo
Consideramoselpndulodelejemplo3deltema2:
ml 2 (t ) d (t ) mgl sin (t ) 0
Enformadeestado
x1 (t ) x2 (t )
d
g
x 2 (t )
x2 (t ) sin x1 (t )
2
l
ml
Lospuntosdeequilibrioseobtienendelascondiciones
x2=0,sinx1=0
deloqueseobtiene
n
xe
, n 0, 1, 2,
0
FacultaddeCienciasFsicasUCM
SistemasDinmicos.Estabilidad
Fsicamente corresponde a puntos, con velocidad angular 0, en las posiciones verticales
superioreinferior.
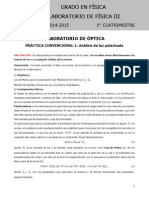
Ejemplo2:Modelodedepredadoresypresas(VolterraLotka)
ConsideramoslaecuacindeVolterraLotkaconlosparmetrosa=b=c=d=1
x1 (t ) x1 (t ) x1 (t )x2 (t )
x 2 (t ) x2 (t ) x1 (t )x2 (t )
Elsistematienedospuntosdeequilibrio
0
1
x e1 , x e 2
0
1
El primer punto corresponde a la solucin trivial de ser cero las poblaciones de
depredadores y de presas. La figura 2 muestra el diagrama de fase para distintas
condicionesiniciales.Sevecomoelpunto(1,1)correspondeaunpuntodeequilibrio.
3.5
Depredadores
2.5
1.5
0.5
0.5
1.5
2.5
3.5
Presas
Figura2.DiagramadefasedelaecuacindeVolterraLotka
3.1.1
Ciclos lmite
Adems de puntos de equilibrio, los sistemas dinmicos no lineales pueden presentar
solucionesperidicasestacionariasconocidascomocicloslmite,quesedefinencomouna
solucin peridica que no tiene vecinos que sean peridicos. Las trayectorias prximas al
J.MdelaCruz
ControldeSistemas
ciclolmiteoseaproximanyfinalizanenelciclolmite,odivergendel,peronosonellas
mismasperidicas.SedicequetieneperiodoTsix(t+T)=x(t),paratodot.
Estas soluciones tienen gran importancia ya que permiten generar soluciones peridicas
quecorrespondenasolucionesdesistemasqueaparecenconprofusinenlaingenieray
enlanaturaleza.
Ejemplo3:OsciladordeVanderPol
La ecuacin de van der Pol presenta una solucin de este tipo. La figura 3 muestra su
diagramadefaseyunconjuntodesolucionesparadistintascondicionesiniciales.
Solucion de la ecuacin de van der Pol
Diagrama de Fase
5
4
x1
x2
3
2
solucion x
x2
1
0
-1
-2
-1
-3
-2
-4
-5
-4
-3
-2
-1
0
x1
-3
0
10
15
tiempo t
20
25
30
b)
a)
Figura3.DiagramadefaseysolucindelaecuacindevanderPol.a)Diagramade
fase.Semuestranlastrayectoriasparadistintascondicionesinicialesqueaparecen
marcadas con crculos en rojo. b) Evolucin temporal de los estados para una
condicininicial.Seobservaunasolucinperidicaencadaunodelasvariablesde
estado.
Ejemplo4:Ecuacinlogstica
Otroejemplode ciclolmitelovemosenla denominadaecuacinlogstica. Estaecuacin
apareceenmuchasaplicaciones.Seutiliza,porejemplo,enbiologacomomodelodeuna
poblacin de una sola especie con una cantidad limitada de recursos. El modelo puede
construirsedeformaelectrnicaconamplificadoresoperacionales(ejercicio4.12dellibro
deAstrmyMurray).Elmodelonormalizadotienelaforma
x1 x2 x1 (1 x12 x22 )
x2 x1 x2 (1 x12 x22 )
(6a)
Pasandoacoordenadaspolares
FacultaddeCienciasFsicasUCM
SistemasDinmicos.Estabilidad
x12 x22 ,
r r (1 r 2 )
1
tan1
x2
x1
setiene
(6b)
Elciclolmitecorrespondealpuntosingularr=1.Elotropuntosingularesr=0.
Diagrama de Fase del Oscilador
3
x2
-1
-2
-3
-3
-2
-1
0
x1
Figura 4. Trayectorias de la ecuacin logstica en el plano de fases para
distintas condiciones iniciales, marcadas con aspas rojas. El origen es un
puntodeequilibrioytambinloeslacircunferenciaderadiounidad.
3.1.2
Movimiento nominal
En algunos problemas se est interesado en estudiar la estabilidad, no en un punto de
equilibrio, sino en una trayectoria, por ejemplo, determinar si un sistema permanece
prximo a su trayectoria cuando se le aparta de ella. Pensemos, por ejemplo, en qu
ocurresiaunciclolmiteseleaparta dela trayectoria,o,siaunvehculo quesigueuna
trayectoriaunarfagadevientoleapartadesucamino?
Supongamos que xe(t) es una solucin a la ecuacin (4) con condicin inicial xe(0)= x0.
Supongamosquex(t)eslaevolucinparaunacondicininicialligeramentedistintax(0)=
xe(0)+x0.Consideramoselerrorentreambastrayectorias e(t ) x(t ) x e (t )
Comoambastrayectoriassonsolucinalaecuacin(4)setiene
J.MdelaCruz
ControldeSistemas
e (t ) f (x(t )) f (x e (t ))
f (x e (t ) e(t )) f (xe (t ))
Dadoquelatrayectoriaxe(t)esconocidaponemos
e (t ) h(e(t ), t ), e(0) x 0
(7)
Dondeelvectordeestadoesahoralasealdeerroryelvectorflujoovelocidadesahorah
en lugar de f. Dado que si el error es cero se tiene h(0,t) = 0, el nuevo sistema dinmico
tiene un punto de equilibrio en el origen, y en lugar de estudiar la desviacin x(t) con
respecto a la trayectoria xe(t), estudiamos la estabilidad de (7) con respecto al punto de
equilibrio0.
x(t)
e(t)
xe(t)
Figura5.Trayectoriasnominalyperturbada
3.1.3 Puntos de equilibrio en sistemas lineales
Enlossistemaslinealeselpunto(xe =0,ue=0),essiempreunpuntodeequilibrio.Pueden
existirotrospuntos:todosaquellosparalosqueseverificalarelacin
0 Axe Bu e
(8)
SilamatrizAesnosingular,entoncesparatodaentradadecontrolconstanteueexisteun
estadodeequilibriodadopor:
x e A 1 Bu e
(9)
y e CA1 B D u e
(10)
yconsalida
FacultaddeCienciasFsicasUCM
SistemasDinmicos.Estabilidad
La relacin estacionaria (10) nos permite ver a los sistemas dinmicos de forma esttica:
tenemosunarelacinentradasalidaestticacon
K CA1 B D
SilamatrizAessingularentoncesparaue=0setieneninfinitospuntosdeequilibrio,que
sonelespacionuladelamatrizA,esdecir,aquellospuntosqueverificanlacondicinAx=
0. En este ltimo caso los puntos de equilibrio no estn aislados sino que forman un
continuo(subespaciovectorial).
Para una matriz A no singular nos podemos plantear el problema de si dado un
determinado valor del vector de medida, yc, existe una solucin de equilibrio para ese
punto. Si suponemos que el vector de entrada y de salida tienen el mismo nmero de
componentes,entonces,siexisteunpuntodeequilibriodebeverificarlaecuacin:
x c Mxy
yc
u
c Muy
(11a)
Mxy A B 1
Muy C D
0
I
(11b)
con
Podemos hacernos mas preguntas. Dado un vector de estado cualquiera xp, es posible
determinarunasealdecontrol,up,quehagaque(xp,up)seaunpuntodeequilibrio?Sila
respuestaesspodramospensar,enprincipio,quebastarapasardeunpuntodeequilibrio
a otro cambiando la seal de entrada. Pero cabe preguntarse ahora en que forma se
produceesatransicindeunpuntodeequilibrioaotro?Esposiblecontrolarlaformaen
que esa transicin se produce? Si la respuesta a la primera pregunta fuera no, cabra
todavapreguntarsesiexistealgnmododegenerarlasealdecontrolquepermitapasar
alestadodeseado.Podemospreguntarnostambinsobrelaposibilidaddeconseguirquela
sealdemedidatomeunvalordado.Estaspreguntasyotraslasiremoscontestandoalo
largodelaasignatura.
Ejemplo5:Puntodeequilibriodeunsistemalineal
Elsistemadescritoporlaecuacindiferencial
d 2 y (t )
dy (t )
du (t )
4
3 y (t ) 3
6u (t )
2
dt
dt
dt
Admitecomorepresentacinenvariablesdeestadolasmatrices:
J.MdelaCruz
ControldeSistemas
4 1.5
2
A
, B , C 1.5 1.5 , D 0
0
2
0
Dado un valor de la seal de salida, yc, los valores del vector de estado y de la seal de
entradason
0
x c Mxy
y c 2 / 3 y c
u
M
c uy
1 / 2
Si,porejemplo,queremosquelasealdesalidadelsistemaseayc=5,setiene:
0
xc
,
10 / 3
uc 5 / 2
Podemoscomprobarqueestosvalorescorrespondenaunpuntodeequilibrio:
0 4 1.5 0 2
5/2
0 2
0 10 / 3 0
3.2 Linealizacinentornoaunpuntodeequilibrio
Lamayoradelossistemasqueencontramosenlanaturalezasondecarcternolineal;sin
embargo, podemos utilizar una linealizacin en torno a un punto de equilibrio para
conseguir un modelo lineal del sistema en una regin suficientemente prxima a dicho
punto.Porejemplo,consideremoselmodelodelpndulo
x1 (t ) x2 (t )
d
g
x 2 (t )
x2 (t ) sin x1 (t ) F (t )
2
l
ml
Elsistemaestenequilibriocuandoseencuentraenposicinverticalconvelocidadangular
nula: x1=0, x2=0. Si desplazamos ligeramente al pndulo de su posicin de equilibrio
podemosaproximarelsenodelngulodesplazadoporelvalordelngulo,demodoqueel
modeloenlasproximidadesdelpuntodeequilibrioes:
x1 (t ) x2 (t )
x2 (t )
d
g
x (t ) x1 (t ) F (t )
2 2
ml
l
queesunmodelolinealconn=2,m=p=1,x=[,]T,y=,u=F(t),ymatrices
A=[1,0;g/l,d/m/l2],
FacultaddeCienciasFsicasUCM
10
SistemasDinmicos.Estabilidad
B=[0;1],
C=[1,0],
D=0.
De forma general, consideramos un sistema (1) con un punto de equilibrio en (xe, ue).
Desarrollamoslaecuacin(1)enseriedeTylorentornoalpuntodeequilibrio:
f(x, u)
f(x, u)
x (t ) f(x, u) f(x e , ue )
(x x e )
(u ue ) O( x x e
x xe ,
x
u x x e ,
uue
Dondemediante O( x xe
, u ue
) (12)
u ue
, u u e ) seindicatrminosquesondespreciables,enuna
2
primera aproximacin, para valores muy prximos al punto de equilibrio. Como adems
f(xe,ue)=0,podemosaproximaralsistemaescogiendounnuevovectordeestadoz=xxe,y
unnuevovectordecontrolw=uue,yaproximamoslaecuacin(12)delaforma
z (t ) A z (t ) B w (t )
(13a)
DondeAyBsonlasmatricesJacobianasdefconrespectoaxyau,respectivamente:
f(x, u)
x x xe ,
uue
f(x, u)
u x xe ,
uue
f1
x
1
fn
x1
f1
u
1
fn
u1
f1
xn
fn
xn x xe ,
uue
f1
um
fn
un x xe ,
(13b)
uue
Al sistema (13) se le denomina aproximacin lineal del sistema en torno al punto de
equilibrio(xe,ue).
Paralasalidaprocedemosdemanerasimilaralestado,obteniendo
y(t ) g(xe , ue ) g(x, u)
x
J.MdelaCruz
x xe ,
uue
(x x e )
2
2
g(x, u)
(u ue ) O( x x e , u ue ) (14)
u x xe ,
uue
11
ControldeSistemas
Escogemos un nuevo vector de salida = yg(xe,ue), y despreciando nuevamente los
trminosdeordensuperior,tenemosdeformaaproximada
y (t ) C z (t ) D w (t )
(14a)
DondeCyDsonlasmatricesJacobianasdegconrespectoaxyau,respectivamente
g (x, u)
x
, D
x x e ,u u e
g (x, u)
u
(14b)
x x e ,u u e
Deestemodoobtenemosunmodelolinealquedescribealsistemanolinealenunentorno
delpuntodeequilibrio.
La figura 6 muestra un esquema de la aproximacin lineal en torno a un punto de
equilibrio.Enlaaproximacinlinealusamoslaentradaw(t),lasalida(t)yelestadoz(t);
recuperamoselestadooriginalx(t)ylasalidaoriginaly(t)sumandolosvaloresxeyg(xe,ue)
alosvaloresdeestadoysalidadelmodelolineal,respectivamente.Lasealdecontrolreal
delsistemaeslasealdecontrolqueseusaenelmodelolinealmaselvalordeequilibrio:
u(t)=w(t)+ue.
x(t)
u(t)
y(t)
x(t)=f(x(t),u(t))
y(t)=g(x(t),u(t))
Aproximacinlineal
ue
u(t)
+
xe
w(t)
z(t)=Az(t)+Bw(t)
(t)=Cz(t)+Dw(t)
z(t) + +
(t) +
+
x(t)
y(t)
g(xe,ue)
Figura6.Aproximacinlinealdeunsistemaentornoalpuntodeequilibrio(xe,ue)
La aproximacin lineal anterior se puede realizar tambin si la entrada de control es
constanteylafuncinf,yporlotantoelvectorvelocidad,permanececonstante,f(xe(t),ue)
=ve.Ahoralavariacintienelugar,noentornoaunpunto,sinoenlatrayectorianominal;
enlafigura4ueesconstante,peroelvectorxevaraconeltiempo.
Ejemplo6:Linealizacindelpndulo
Consideramoselpndulosinsealdeentrada
FacultaddeCienciasFsicasUCM
12
SistemasDinmicos.Estabilidad
x1 (t ) x2 (t )
d
g
x 2 (t )
x2 (t ) sin x1 (t )
2
l
ml
Usamoslasiguientenotacin
g
,
l
d
2 ml 2
La ecuacin lineal del movimiento en un entorno del punto de equilibrio (0, 0), posicin
verticalhaciaabajo,es
x1 0
2
x2
1 x1
2 x2
Paraelpuntodeequilibrio(,0),posicinverticalhaciaarriba,laecuacinlineales
x1 0
2
x2
1 x1
2 x2
3.3 EstabilidadeInestabilidad
Consideramos un sistema descrito por la ecuacin (4), y sea x(t, x0) la solucin de la
ecuacinparalacondicininicialx(0)=x0.
Definicin1.1Unasolucinx(t,x0)sediceestablesi,paratodoR>0,existeunr>0,talque
siotroestadoinicialx0averifica
x0 a x0 r
x(t , x0 a ) x(t , x0 ) R t 0.
Enotrocaso,lasolucinsediceinestable.
Un caso especial es cuando la solucin es un punto de equilibrio, en ese caso la solucin
permaneceenelmismoestadoalolargodeltiempo,
x(t,xe)=xet0.
y decimos que el punto de equilibrio es estable. Esta definicin se denomina tambin
estabilidad en el sentido de Liapunov, y nos dice que la trayectoria permanece
arbitrariamente prxima al punto de equilibrio si partimos de un estado inicial
suficientementeprximoal.
J.MdelaCruz
13
ControldeSistemas
R
r
Figura7.Conceptodeestabilidad:latrayectoriapermaneceprximaalpuntodeequilibrio
Definicin1.2Unasolucinx(t,x0)sediceasintticamenteestablesiesestableyadems
existeunr>0,talquesi
x0 a x0 r
x(t , x0 a ) x(t , x0 ) 0 cuando t .
La definicin nos dice que el estado es estable y, adems, si el estado comienza
suficientementeprximoalestadoinicialconvergealasolucinestablecuandoeltiempo
tiendeainfinito.Paraunpuntodeequilibrioimplicalaconvergenciaadichopuntocuando
eltiempotiendeainfinito.
Sedenominadominiodeatraccindelpuntodeequilibrioalmayorentornoparaelquese
cumplelacondicindeestabilidadasinttica.
Figura8.Conceptodeestabilidadasinttica:latrayectoriatiendealpuntodeequilibrio
Definicin1.3.Unasolucinx(t,x0)estableperonoasintticamenteestablesedenomina
marginalmenteestable.
FacultaddeCienciasFsicasUCM
14
SistemasDinmicos.Estabilidad
Definicin 1.4 Una solucin x(t, x0) se dice exponencialmente estable si existen dos
nmeros > 0, > 0, tal que t 0
x(t , xoa ) x t , x0 xoa x0 e t en un
entornodelpuntoinicialx0.
Definicin1.5Silaestabilidadasinttica(exponencial)severificaparacualquiervalorinicial
delestado,elpuntodeequilibriosedenominaasintticamente(exponencialmente)estable
deformaglobal.
3.3.1
Estabilidad de sistemas lineales.
Enlossistemaslinealesinvarianteseneltiempo(matricesA,B,CyDconstantes)sepuede
tenerestabilidadasinttica,marginaloinestabilidad.Laestabilidadasintticasiemprees
exponencialyglobal,ylainestabilidadsiempreimplicauncrecimientoexponencial.
La estabilidad de los sistemas lineales slo depende de la matriz de estado A, es decir la
estabilidaddependedelcomportamientodelassolucionesalaecuacin
dx(t )
Ax(t ), x(0) x0
dt
(15)
x(t , x0 ) e At x0
(16)
Lasolucina(15)es
Elorigenx=0essiempreunpuntodeequilibrioysuestabilidad,yladelsistema,depende
delosautovaloresdelamatriz,(A).Estosverificanlaecuacin
determinante(IA)=IA=0.
ElpolinomioIAsedenominaecuacincaractersticadelamatrizA.Laestabilidadde
unsistemalinealesunacaractersticadelsistema,porloquenohablamosdeestabilidad
deunasolucinparticularodeunpuntodeequilibrio.
LossistemaslinealesmssencillosdeanalizarsonaquellosenlosquelamatrizdeestadoA
tieneformadiagonal:
J.MdelaCruz
(17)
15
ControldeSistemas
En este caso la evolucin de cada uno de los componentes del vector de estado xi
evolucionadeformaindependientedelresto.Laecuacin(15)sepuedeponerenlaforma
dxi (t )
i xi (t ), i 1,..., n
dt
(18)
xi (t ) ei t xi (0)
(19)
Consolucin
Vemos que el punto de equilibrio es estable si i 0 para todo i, y exponencialmente
establesii<0.
Enelcasodequeunautovalorseacomplejo = +j,tambinesautovalorsucomplejo
conjugado=j,ylaestabilidadasintticanecesitaquelapartereal,,seamenorque
cero.
Estecomportamientosepuedegeneralizar,loquesehaceenelsiguienteteorema.
Teorema.Estabilidaddesistemaslineales.Elsistema(15)esasintticamenteestablesiy
slositodoslosautovaloresdelamatrizAtienensuparterealmenorquecero.Elsistema
esinestablesialgnautovalortienelaparterealmayorquecero.Enotrocasoelsistemaes
marginalmenteestable.
Ejemplo7.Sistemaslineales
Elsistemadelejemplo3tienematrizdeestado
4 1.5
A
0
2
conautovalores1=3,2=1yes,portanto,asintticamenteestable.
Elsistemaconmatriz
0 1
A
1 1
tiene autovalores 1 = 0.5 + j 0.87, 2 = 0.5 j 0.87, y es por tanto, asintticamente
estable.
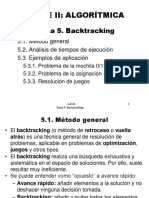
La figura 9 muestra, para un sistema de segundo orden, la evolucin de las trayectorias
paradistintosvaloresiniciales,dependiendodelaposicindelosautovaloresenelplano
complejo.Silosautovaloressonambosnegativosoambospositivossedicequeelorigen
correspondeaunnodoestableoinestable,respectivamente.Silosautovaloressonunpar
FacultaddeCienciasFsicasUCM
16
SistemasDinmicos.Estabilidad
complejoconjugadossedicequeelorigenesunfocoestableoinestable,dependiendode
quelaparte realseanegativaopositiva.Si unautovalorespositivoyelotro negativose
dicequeelsistematieneunpuntodesilla.Silosautovaloressonimaginariospuros,sedice
queelorigenesuncentro.
J.MdelaCruz
17
ControldeSistemas
Figura9.Trayectoriasdeunsistemadesegundoordenenrelacinalaubicacin
desusautovalores
3.4
Anlisisdelaestabilidadporaproximacinlineal.
En muchos casos se puede determinar la estabilidad de un punto de equilibrio de un
sistema no lineal a partir de la estabilidad de una aproximacin lineal en el entorno del
puntodeequilibrio.EstemtodoseconocecomomtodoindirectodeLiapunov,oprimer
mtododeLiapunov.
Eneldiseo decontroladoressesuelerealizarunaaproximacinlinealdelsistemaenun
entorno del punto de equilibrio, para hacer un diseo de control basado en el modelo
lineal.Elcontrolpermitemanteneralsistemaprximoasupuntodeequilibrioy,deesta
forma,asegurarsequelaaproximacinlinealesvlidaparaelcontroldelsistema.
TeoremadelinealizacindeLiapunov.
Silalinealizacindeunsistemanolinealesasintticamenteestableelsistemano
linealesasintticamanenteestable.
Si la linealizacin de un sistema no lineal es inestable el sistema no lineal es
inestable.
Si la linealizacin de un sistema no lineal es marginalmente estable (tiene sus
autovaloresconparterealnegativasalvoalmenosunodeelloscuyapartereales
cero) entonces no se puede concluir nada del sistema no lineal, este puede ser
estable,asintticamenteestableoinestable.
FacultaddeCienciasFsicasUCM
18
SistemasDinmicos.Estabilidad
Ejemplo8:Estabilidaddelpndulo
Elmodelolinealparaunpnduloensuposicininferiores
x1 0
2
x2
1 x1
2 x2
conecuacincaracterstica
I A
1
2 2 2 0
2
ysolucin
1 1
2 1
siempre es positivo y 0. Para valores 0 < < 1 los autovalores son nmeros
complejos con parte real negativa, y por lo tanto corresponden a focos estables. El
correspondientesistemanolinealesasintticamenteestable.
Para valores 1 los autovalores son nmeros reales negativos, y por lo tanto
corresponden a nodos estables. El correspondiente sistema no lineal es asintticamente
estable.
Para valores = 0 los autovalores son complejos con parte real cero, y por lo tanto
corresponde a un centro. No podemos concluir nada sobre la estabilidad del sistema no
lineal.
Paraelpuntodeequilibrio(,0),posicinverticalhaciaarriba,laecuacincaractersticaes
I A
2 2 2 0
ysolucin
1 1
2 1
Correspondenapuntosdesillayporlotantoelsistemanolinealesinestable.
Ejemplo9:Estabilidaddelaecuacinlogstica
Verejemplo4.8dellibrodeAstrmyMurray.
J.MdelaCruz
19
ControldeSistemas
Ejemplo10:Ciclolmiteenunsistemadecontrol
Consideramoselsistema
x1 x2 2 x2
x2 x1 x2 u
Elsistemaesinestableparau=0:losautovaloresson1j2
Laleydecontrol
u(k)=k1x1k2x2
conk1=2,k2=4loestabiliza,autovaloresen1j2,yeldominiodeatraccinestodoel
espaciodeestados.Sinembargo,silasealdecontrolestlimitadaavaloresentre1y1el
dominiodeatraccincambia,comosemuestraenlafigura10.
Diagrama de Fase del Oscilador
1
0.8
0.6
0.4
x2
0.2
0
-0.2
-0.4
-0.6
-0.8
-1
-1
-0.8
-0.6
-0.4
-0.2
0
x1
0.2
0.4
0.6
0.8
Figura10.Dominiodeatraccindefinidoporunciclolmite(curvaenrojo)
3.5
Anlisisdeestabilidaddesistemasnolineales
Presentamosunmtodoparaelanlisisdelaestabilidadtantodesistemaslinealescomo
nolineales,conocidocomosegundomtododeLyapunov.Elmtodofuedesarrolladopor
AleksandrMijilovichLiapunovenRusiaen1892.Sutrabajosetradujoalfrancsen1907,
FacultaddeCienciasFsicasUCM
20
SistemasDinmicos.Estabilidad
peronofuehasta1960quesedioaconocerenlospasesoccidentales.Desdeentonceses
untemadeinvestigacinencontrol.
El mtodo est ntimamente relacionado con la idea de que la energa, para un sistema
masamuelleamortiguadorsinfuerzasexternasaplicadas,decreceparacualquieraquesea
latrayectoriadelsistema.Elmtodorequiereencontrarunafuncindelestado,conocida
como funcin de Liapunov, que cumpla determinadas propiedades. Vamos a introducir
algunosconceptosreferentesapropiedadesqueseexigenalasfuncionesdeLiapunov.
DecimosqueunafuncincontinuaV:RnR,esdefinidapositivasiV(x)>0,paratodox
Rndistintodecero,yV(0)=0.
DecimosqueunafuncincontinuaV:Rn R,esdefinidanegativasiV(x)<0,paratodox
Rndistintodecero,yV(0)=0.
Decimos que una funcin continua V: Rn R, es semidefinida positiva si V(x) 0, para
todoxRndistintodeceroyV(0)=0.
Decimos que una funcin continua V: Rn R, es semidefinida negitiva si V(x) 0, para
todoxRndistintodeceroyV(0)=0.
Parailustrarladiferenciaentredefinidapositivaysemidefinidapositiva,tomamosxR2
con
V1(x) x12 ,
V2 (x) x12 x22
Ambas funciones son siempre no negativas, sin embargo V1 se hace cero para todos los
valores x = (0, a) , aunque a sea distinto de cero. Por ello es semidefinida positiva. Sin
embargo,lanicaposibilidaddequeV2seanulaesenelorigen,yes,portanto,definida
positiva.
Consideremosunsistemadinmico
x (t ) f (x(t))
(4)
conunpuntodeequilibrioenxe=0.Sielpuntodeequilibriofueradistintodecerosiempre
podemos hacer un cambio de coordenadas que haga que ese punto sea el origen, por
ejemploz=xxe.
El siguiente teorema proporciona condiciones suficientes de estabilidad para un sistema
dinmico.
TeoremadeestabilidaddeLiapunov.
J.MdelaCruz
21
ControldeSistemas
El punto de equilibrio de (3), xe = 0, es estable de forma local si se puede encontrar una
funcin V(x) que admite derivadas continuas y cumple las siguientes condiciones en un
entornoabiertodelorigen,B(r)deradior>0:
i)
ii)
V(0)=0
V(x)>0paratodox0B(r)
iii)
V dx V
V (x)
f (x) 0,
x dt
x
x 0 B(r )
Elsistemaesasintticamenteestabledeformalocalenxe=0sisecumplenlascondiciones
i),ii)y
iv)
V (x) 0,
x 0 B(r )
Elsistemaesasintticamenteestabledeformaglobalsisecumplenlascondicionesi),ii)y
iv)entodoelespacioRn,yadems
v)
V (x) ,
x independientementedeladireccindecrecimiento
dex.
LafuncinV(x)quecumplelascondicionesi),ii)yiii)seconocecomofuncindeLiapunov
delsistema(4)enelentornoB(r). V (x) seconocecomoderivadadeLiapunov.Lacondicin
iii)indicaquelafuncinV(x)nopuedecreceralolargodelastrayectorias;lacondiciniv)
indicaquelafuncinV(x)decrecealolargodelastrayectorias.
UnafuncindeLiapunovquecumplelascondicionesi),ii)yiv)delimitaunespacioincluido
eneldominiodeatraccindelpuntodeequilibrio,peronoimplicaqueeseseaeldominio
de atraccin. Un punto de equilibrio es globalmente estable si su regin de atraccin es
todoRn.
Losresultadosdelteoremaadmitenunaintuitivainterpretacingeomtrica.Lascurvasde
nivel,V(x)=cc>0,paraunafuncindefinidapositivarodeanelorigenyseaproximana
l cuando c decrece, figura 11. La derivada de Liapunov es el producto escalar de dos
vectores: el vector gradiente de la funcin de Liapunov V / x , y el vector velocidad
V
x f (x) : V (x)
f(x) cos , siendo el ngulo formado por ambos vectores. La
x
condicindedefinidanegativaquieredecirqueambosvectoresformanunngulomayor
de90,loqueindicaquelastrayectoriassemuevenacurvasdeniveldemenorvalorcada
vez,porloquedebernterminarenelorigen.
FacultaddeCienciasFsicasUCM
22
SistemasDinmicos.Estabilidad
V/x
V(x)
x2
V(x)
f(x)
x1
V(x)=c
x1
x2
Figura 11. Funcin de Liapunov y sus curvas de nivel en un sistema de 2
orden.
Elteoremanoesconstructivoenelsentidodequenonosdicecomoconstruirunafuncin
de Liapunov; slo nos dice que, si la podemos construir, podemos asegurar la estabilidad
delsistema.Sedemuestraquelascondicionesi),ii)yiii)soncondicionesnecesarias,locual
asegura que si el sistema es estable existir al menos una funcin de Liapunov para el
sistema. Existen mtodos que permiten construir funciones de Liapunov bajo ciertas
condiciones,normalmentemuyrestrictivas.Peronoexisteunasolucingeneralporloque
todava, para un gran nmero de sistemas, su determinacin requiere de experiencia e
intuicin.ElquenoencontremosunafuncindeLiapunovnodemuestraqueseainestable.
No obstante, existen teoremas que dan condiciones para que un punto de equilibrio sea
inestable.
Ejemplo10:Estabilidaddeunsistemadeprimerorden
Consideramoselsistemadeprimerorden
x g ( x )
Dondeg(x)esunafuncincontinuaenunintervalo(a,a)dondecumple
g(0)=0,xg(x)>0,x0
El sistema tiene un punto de equilibrio en el origen. Consideramos como funcin de
Liapunovenelintervaloconsiderado
V ( x) g ( y ) dy
x
J.MdelaCruz
23
ControldeSistemas
EsfcilverqueVcumpletodaslascondicionesparaconsiderarlaunafuncindeLiapunov
vlida como candidata. Para ver si realmente es una funcin de Liapunov vlida
necesitamoscalcularsuderivadaalolargodelastrayectorias:
V
V (x)
( g ( x)) g 2 ( x) 0, x (a, a) 0.
x
Luegoporelteoremaseconcluyequeelsistemaesasintticamenteestable.
Ejemplo11:Estabilidaddelpnduloporel2mtododeLiapunov
Consideramoslaecuacindelpndulonormalizada
x1 (t ) x2 (t )
x 2 (t ) x2 (t ) sin x1 (t )
Consideramoslasiguientefuncinescalar
V (x) (1 cos x1 (t ))
1 2
x2
2
La funcin es definida positiva para un entorno del punto de equilibrio x e =(0, 0). Su
derivadatemporales
R
V (x) x2 sin x1 x2 x2 x22 0
DeacuerdoconelteoremadeLiapunovelsistemaesestableenunentornodelpuntode
equilibrio. Al ser la funcin semidefinida positiva no podemos concluir la estabilidad
asinttica.
Siconsideramoslafuncindefinidapositiva
V (x) 2(1 cos x1 (t ))
2
1 2 1
x2 x1 x2
2
2
setiene
V (x) ( x1 sin x1 x22 ) 0
Peroenunentornodelpuntodeequilibrioseverifica
V (x) ( x12 x22 ) 0, x 0
queaseguralaconvergenciaasintticalocal.
FacultaddeCienciasFsicasUCM
24
SistemasDinmicos.Estabilidad
Ejemplo12.Estabilidadasintticadeunsistemade2orden
Estudiamoslaestabilidaddelpuntodeequilibrioxe=(0,0)delsistema
x1 x1 ( x x 2) 4 x x
2
1
2
2
2
1 2
x2 4 x12 x2 x2 ( x12 x22 2)
Consideramoslafuncin
V (x) x12 x22
cuyaderivadaalolargodelastrayectoriases
V (x) 2( x12 x22 )( x12 x22 2)
Lafuncinesdefinidanegativaenunentornodelorigenderadior<2.LuegolafuncinV
es una funcin de Liapunov, y por el teorema de estabilidad se deduce que el origen es
asintticamenteestable.
Verejemplo4.9dellibrodeAstrmyMurray.
3.5.1
Aplicacin a sistemas lineales.
Consideramoselsistemalinealdedimensinn
x A x
yestudiamossuestabilidadenelpuntodeequilibrox=0.Consideramoscomotentativade
funcindeLiapunovlaformacuadrtica
V(x)=xTPx
dondePesunamatrizsimtrica.LafuncinVesdefinidapositivasilamatrizPloes,loque
ocurresitodossusautovaloressonrealesypositivos.
Laderivadaalolargodelastrayectoriases
V dx
V
xT Px x T Px xT ( PA AT P)x xT Qx
x dt
Lacondicindeque V seadefinidanegativaequivaleaexigirquelamatrizQseadefinida
positiva. Luego para encontrar una funcin de Liapunov para un sistema lineal basta con
escoger una matriz Q definida positiva y resolver la denominada como ecuacin de
Liapunov
J.MdelaCruz
PA AT P xT Qx
(20)
25
ControldeSistemas
Laecuacin deLiapunov eslinealenloselementosdelamatrizPypuederesolversepor
mtodosdelalgebralineal.AlserPsimtricahayquedeterminarn*(n+1)/2parmetros.El
comando de Matlab lyap(AT, Q) permite obtener la matriz P. Se puede demostrar que la
ecuacinsiempretienesolucinsitodoslosautovaloresdelamatrizAtienenlapartereal
negativa,esdecir,siesasintticamenteestable.Adems,silamatrizQesdefinidapositiva,
lasolucinPtambinloes.
LemadeLiapunov.Elorigendelaecuacinlineal x A x esasintticamenteestablesiy
slo si para toda matriz simtrica definida positiva Q existe una matriz simtrica definida
positivaPqueverificalaecuacin PA AT P xT Qx .
Ejemplo13.
Consideramoslasmatrices
p
0 1
1 0
, Q
, P 11
A
1 1
0 1
p12
p12
p22
Dondeporsimetrap12=p21.LaecuacindeLiapunovdalugaraunsistemadeecuaciones
quepodemosponerenlaforma
0 2 0 p11 1
1 1 1 p 0
12
0 2 2 p22 1
Consolucinnica
p11 1.5
p 0.5
12
p22 1.0
1.5 0.5
P
1
0.5
La matriz P es definida positiva y, por tanto, la matriz A tiene todos sus autovalores con
parterealnegativayesasintticamenteestable.
3.5.2
Principio de Invarianza de Krasovski-Lasalle
Resulta bastante habitual que para estudiar la estabilidad de un punto de equilibrio
encontremos una funin de Liapunov cuya derivada sea semidefinida negativa, lo que no
permiteconcluirsuestabilidadasinttica.Noobstante,debidoalprincipiodeinvarianzase
puedetodavaconcluirlaestabilidadasintticabajociertascircunstancias.Elconceptogua
es el de conjunto invariante, que supone una generalizacin del concepto de punto de
equilibrio.
FacultaddeCienciasFsicasUCM
26
SistemasDinmicos.Estabilidad
Definicin de conjunto invariante. Un conjunto D es un conjunto invariante para un
sistema dinmico, si toda trayectoria del sistema que comienza en un punto de D
permaneceenDentodoslosinstantesdetiempoposteriores.
Unpuntodeequilibrioesunconjuntoinvariante,ascomounciclolmitey,tambin,de
formatrivial,loeselespaciodeestadocompleto.
TeoremadeKrasovskiLasalle(KL).SeaVunafuncindefinidapositivadeformalocal,de
modoqueenelconjuntocompactoD(r)={xRn:V(x)r }severifica V 0.Definimos
el conjunto S como el formado por todos los puntos de D(r) para los que se anula la
derivadadeV:
S={xD(r): V =0}.
EntoncestodasolucinqueempiezaenDtiendealmayorconjuntoinvarianteincluidoenS
cuandot.SielconjuntoSslotienecomoconjuntoinvariantealpuntodeequilibrio,
entoncessteesasintticamenteestable.
Ejemplo14:Estabilidadasintticadelpndulo
Paraelmodelonormalizadodelpndulo,
x1 (t ) x2 (t )
x 2 (t ) x2 (t ) sin x1 (t )
hemosvistoquelafuncindeLiapunov
1 2
x2
2
V (x) (1 cos x1 (t ))
V (x) x2 sin x1 x2 x2 x22 0
slonospermitededucirlaestabilidaddelpuntodeequilibrio(0,0).Usamoselteoremade
KL.ElqueladerivadadelafuncindeLiapunovseanuleimplicaquex2=0.Consideramosr
<.ElconjuntoSestdefinidoahorapor
S={xD(r):x2=0}.
NecesitamoscalcularelmayorconjuntoinvarianteincluidoenD.Paraqueunatrayectoria
permanezca en S se debe cumplir x2 = 0 para todo t, y por tanto tambin x2 = 0, lo cual
implicaquex1=0.LuegoelmayorconjuntoinvariantedeSes(0,0),deloquesededucepor
elteoremadeKLqueelorigenesasintticamenteestable.
J.MdelaCruz
27
ControldeSistemas
3.6 EjemplodeusodelafuncindeLiapunovparadisearsistemasde
control
Supongamoselsistemadeuncuerpodemasamquesemuevealolargodeunadireccin
x.Laecuacindinmicaes mx(t ) F , quepodemosponerenlaformadeestado
x1 (t ) x2 (t )
F
x 2 (t )
u
m
Consideramos para este cuerpo una funcin de Liapunov (tentativa) relacionado con la
energadelsistema:
1 2 1
1
1
x Kx 2 x22 Kx12 ,
2
2
2
2
K 0
Suderivadaes:
T
V
V x x2 x 2 Kx1 x2 x2u Kx1 x2
x
Cmoelegimosudemodoqueelsistemaseaasintticamenteestable?Laeleccin
u cx2 Kx1 ,
V cx22 0
c 0,
K 0
da
PorKLelsistemaesasintticamenteestable.Elsistemaconlaleydecontroles
x 1 (t ) x2 (t )
x 2 (t ) Kx1 cx2
0
A
K
Luego
1
, con ecuacin caracterstica
c
I A 2 c K 0. Los
autovalores del sistema son siempre de parte real negativa cuando K>0, c >0, luego el
sistemaesexponencialmenteestable.
Podemos extender el control del ejemplo al caso ms general en que el sistema est
descritoporlaecuacindiferencial
x Ax Bu
Utilizamoscomoleydecontrol
FacultaddeCienciasFsicasUCM
28
SistemasDinmicos.Estabilidad
u Kx
DondeKesunamatrizdedimensinadecuada.Conloqueresultaelsistema
x A BK x Ax
ParaqueelsistemacontroladoseaexponencialmenteestableesnecesarioquelamatrizK
seescojademodoquelaecuacindeLiapunov
A
T P Q
PA
TieneunasolucinPsimtricadefinidapositivaparacualquiermatrizQsimtricadefinida
positiva.
Ejemplo.Elsistemalinealdescritoporlaecuacin
x 1 (t ) x2 (t )
x 2 (t ) x1 u
Conlaleydecontrol
u Kx k1 x1 k2 x2
Resultaenelsiguientesistemaenlazocerrado
x 1 (t ) x2 (t )
x 2 (t ) (1 k1 )x1 k2 x2
p11
p21
p12 0
p22 1 k1
Luego A
.SitomamosQ=IsedebecumplirlaecuacindeLiapunov
1 k1 k2
1 0 1 k1 p11
k2 1 k2 p21
p12 1 0
p22 0 1
EstaecuacindalugaraunconjuntodetresecuacioneslinealesdeloselementosdeP:
1 2(1 k1 )p12
0 p11 k2 p12 (1 k1 )p22
1 2 p12 2k2 p22
Delasqueseobtienelasolucin
J.MdelaCruz
29
ControldeSistemas
k12 k22 k1
2k2 (k1 1)
P
2(k1 1)
2(k1 1)
k1
2k2 (k1 1)
Paraqueseadefinidapositivasedebecumplir:p11>0, P 0 ,quesesatisfacensi
0
k12 k22 k1
2k2 (k1 1)
k12 k22
4k22 (k1 1)
Ambascondicionessesatisfacensiyslosi
k1>1
k2>0.
Escogiendo la ganancia con esa condicin el punto de equilibrio siempre ser estable de
formaexponencial.
En el curso veremos modos ms eficientes de encontrar la matriz K que produzca un
sistema de control adecuado. Lo importante es retener la idea de que podemos usar la
funcindeLiapunovparadeterminarcontroladoresqueestabilicenalsistema.
.Suecuacin
Podemosdeterminarlaestabilidadanalizandolosautovaloresdelamatriz A
caractersticaes
0
I A
1
2 k2 k1 1
k1 1 k2
Ecuacinquetieneautovaloresconparterealmenorque1siyslosik1 >1yk2>0.Este
mtodoloutilizaremosenleccionesposterioresparadisearcontroladoresdesistemas.
FacultaddeCienciasFsicasUCM
30
SistemasDinmicos.Estabilidad
3.7
Problemas
1. Encontrarlospuntossingularesdelossistemassiguientes,linealizarlasecuacionesen
suentornoydeterminarlanaturalezadedichospuntossingulares.
x1 x2
a)
x 2 x1 x2 (1 x22 )
b)
c)
x1 x2 x1 x1
x 2 1 x1
x1 x1 (1 x2 )
x 2 x2 ( x1 1)
2. LasecuacionesdeVolterraLotkaparaecosistemassepuedenponerenlaforma
x1 x1 x1 x2 x12
x2 x1 x2 x2 x2 x1
donde el trmino en representa el efecto de las enfermedades y de la superpoblacin
sobrelaspresasyeltrminoenmodelaelefectoretardadoquelaalimentacintiene
sobre el depredador. Encontrar los puntos de equilibrio, linealizar en torno aaquel cuyas
dosvariablesdeestadosondistintasdeceroymostrarcomosuestabilidadeinestabilidad
dependedeyDiscutirlaposibilidaddeexistenciadeunciclolmite.
3. Uno de los modelos de ecuaciones diferenciales ms estudiadas como ejemplo de
comportamientocaticoeseldeLorenz,quetienenlaforma:
x1 ( x2 x1 )
x2 ( x3 ) x1 x2 u
x3 x1 x2 bx3
a) Conu=0elsistemapresentaunmovimientocatico.Localizarlospuntossingulares,
linealizar en torno a ellos. Con =10, =28, b = 8/3 determinar la estabilidad o
inestabilidad de los puntos de equilibrio. Simular el comportamiento del sistema
para distintas condiciones iniciales. Hacer su representacin temporal y en el
espaciodefases.
b) Sienelmodelolinealizadoentornoalpuntodeequilibrio[8.4853,8.485,27]Tyu=0
se utiliza la ley de control u=k z1, siendo z1 el primer estado del sistema lineal.
Mostrar usando la ecuacin caracterstica del sistema lineal controlado que el
sistemaesasintticamenteestableparavaloresdek>0.50101.
c) Siaplicamoslaleydecontrolalmodelonolinealsepuedeverqueparavaloresdek
my elevados el sistema tiende al punto de equilibrio de forma normal, sin
J.MdelaCruz
31
ControldeSistemas
embargo segn k se aproxima al valor 0.50101 el comportamiento puede ser de
tipocaticoduranteuntiempo,perofinalmenteconvergealpuntodeequilibrio.
4.
ElmodelocaticodeRsslertienelasecuaciones
x1 x1 x1 x2 x3
x2 x12 ax2
x3 bx1 cx3
Localizarlospuntossingulares,linealizarentornoaellos.Paraa=0.1,b=0.1,c=14discutir
la estabilidad e inestabilidad de los puntos de equilibrio. Simular el comportamiento del
sistema para distintas condiciones iniciales. Hacer su representacin temporal y en el
espaciodefases.
5.Considreseelsistema
x1 x2
x 2 x1 x2 ( x12 1)
Encontrarsudominiodeatraccin.
6.Demostrarlaestabilidadasintticaglobaldelsistema
x1 x2
x 2 x13 x2 , > 0
(UsarV ( x ) x12 x22 ).
7.Considreseelsistema
x1 x2 2 x12 x1 x2
x 2 x1 x2 x1 x2 3x22
Linealizar el sistema y encontrar una funcin de Liapunov para el sistema lineal. Aplicar
dicha funcin para encontrar el tipo de estabilidad del sistema no lineal. Encontrar su
dominiodeatraccin.
8.Tomando
V ( x ) 1 cos x1
1 2
x2
2
comofuncindeLiapunovdelsistema
FacultaddeCienciasFsicasUCM
32
SistemasDinmicos.Estabilidad
x1 x2
x 2 sinx1 x2 , 0
encontrar el mayor valor V0 de modo que la regin conexa de la forma V(x)<V0 es un
dominiodeatraccindelpuntodeequilibrio(0,0).
9.Encontrarundominiodeatraccinparaelsistema
x1 x1 x2
x2 x1 x22
usandolafuncindeLiapunovV ( x ) x12 x22 .
10.ResolverlaecuacinmatricialdeLiapunov
LA A T L I
1
0
A
b a
donde
ymostrarquelasolucinesdefinidapositivasiyslosia>0,b>0.
11.Considerarelsistema
x1 x2
x2 x1 x2 x1 x2
a) UsarelprimermtododeLiapunovparaestudiarlaestabilidadenelorigen.
b) EncontrarunafuncindeLiapunovparaelsistemalinealizado.
c) Usarlafuncinencontradaenb)paraobtenercondicionesquedefinanunaregin
entornoalorigenenlacuallastrayectoriastiendanasintticamentealorigenenel
sistemanolineal.
J.MdelaCruz
33
ControldeSistemas
FacultaddeCienciasFsicasUCM
34
S-ar putea să vă placă și
- Escritura Cuneiforme SumeriaDocument1 paginăEscritura Cuneiforme SumeriasaikandreaÎncă nu există evaluări
- Biprisma de FresnelDocument5 paginiBiprisma de FresnelsaikandreaÎncă nu există evaluări
- Analisis de Luz PolarizadaDocument6 paginiAnalisis de Luz PolarizadasaikandreaÎncă nu există evaluări
- Japones en Viñetas EnteroDocument264 paginiJapones en Viñetas Enteroladycroft8464% (14)
- 2 1-Ecuaciones+polinomicasDocument9 pagini2 1-Ecuaciones+polinomicasMiriam Vanessa Cáceres RetuertoÎncă nu există evaluări
- Ecuaciones Cuadráticas 2022Document10 paginiEcuaciones Cuadráticas 2022EDGAR ARTURO RIVERA MARTINEZÎncă nu există evaluări
- Plantilla PERT CPMDocument12 paginiPlantilla PERT CPMJuan Carlos ArnaoÎncă nu există evaluări
- Problemario T-Student Intervalos 1 PoblaciónDocument1 paginăProblemario T-Student Intervalos 1 PoblaciónMariela del Carmen Rodriguez SalgadoÎncă nu există evaluări
- Examen Parcial IC-343 - Metodos Numericos 2022-I (23.ene.2023)Document7 paginiExamen Parcial IC-343 - Metodos Numericos 2022-I (23.ene.2023)Jhon EspinozaÎncă nu există evaluări
- Aplicación Del Método MCO-ESTADTDocument2 paginiAplicación Del Método MCO-ESTADTFabio OrregoÎncă nu există evaluări
- Estadistica Descriptiva Distribucion BinomialDocument4 paginiEstadistica Descriptiva Distribucion BinomialAlejandro FloresÎncă nu există evaluări
- Manual DOSBox 0.74Document57 paginiManual DOSBox 0.74Jhosep AntonyÎncă nu există evaluări
- Guía de PSeIntDocument9 paginiGuía de PSeIntEl Caballero NocturnoÎncă nu există evaluări
- Diseno e Implementacion de Un Neurocontrolador Aplicado A Un Servosistema No LinealDocument13 paginiDiseno e Implementacion de Un Neurocontrolador Aplicado A Un Servosistema No LinealJos1Încă nu există evaluări
- Taller Dos - Estadistica Inferencial Mariana BayonaDocument3 paginiTaller Dos - Estadistica Inferencial Mariana BayonaMariana BayonaÎncă nu există evaluări
- Semana 3 Método Gráfico - v2Document45 paginiSemana 3 Método Gráfico - v2Johann TÎncă nu există evaluări
- Ganancia ÚltimaDocument18 paginiGanancia ÚltimagenesisÎncă nu există evaluări
- Tipos de ErroresDocument5 paginiTipos de ErroresNeyza LopezÎncă nu există evaluări
- Metodo de RigidezDocument21 paginiMetodo de RigidezAguedo Torres AlexanderÎncă nu există evaluări
- Gonzales Pinto, AlexisDocument6 paginiGonzales Pinto, AlexisAlexis Rkrdo Gonzales PintoÎncă nu există evaluări
- 2 Matematica Financiera Eje 3Document13 pagini2 Matematica Financiera Eje 3Francis Archbold0% (1)
- PLANTILLASDocument16 paginiPLANTILLASAlejandra Cardenas FlorezÎncă nu există evaluări
- Algoritmo de DijkstraDocument3 paginiAlgoritmo de DijkstranelsonandryevÎncă nu există evaluări
- Metodos Numericos TrabajoDocument23 paginiMetodos Numericos TrabajoarnoldÎncă nu există evaluări
- Control Digital Examen FinalDocument21 paginiControl Digital Examen FinalAngelo CruzÎncă nu există evaluări
- Generadores Congruenciales: Conceptos PreviosDocument7 paginiGeneradores Congruenciales: Conceptos PreviosCAMILA MARCA MAMANIÎncă nu există evaluări
- Teoria de ColasDocument14 paginiTeoria de Colasvictor3242100% (1)
- Ley Little Ecuación KinmangDocument22 paginiLey Little Ecuación KinmangJuan PerezÎncă nu există evaluări
- Algebra r1Document3 paginiAlgebra r1LEONARDO VALERIANOÎncă nu există evaluări
- Tarea 8 Calculo IntegralDocument2 paginiTarea 8 Calculo Integralnora martinezÎncă nu există evaluări
- Examen3b 0910 Gaxiola Lopez EnriqueDocument7 paginiExamen3b 0910 Gaxiola Lopez EnriqueAdolfo CerdaÎncă nu există evaluări
- Tema 2 Respuesta en El Dominio Del TiempoDocument27 paginiTema 2 Respuesta en El Dominio Del TiempoMiguel Angel BritoÎncă nu există evaluări
- Entregable N1 MultivariableDocument5 paginiEntregable N1 MultivariableKaren CabreraÎncă nu există evaluări
- MONOGRAFIADocument12 paginiMONOGRAFIAivanÎncă nu există evaluări