S-ar putea să vă placă și
- Comunicación y Espresión Oral en La Eso PDFDocument25 paginiComunicación y Espresión Oral en La Eso PDFFrank Klimovsky GarcíaÎncă nu există evaluări
- UF2406 - El cliclo de vida del desarrollo de aplicacionesDe la EverandUF2406 - El cliclo de vida del desarrollo de aplicacionesÎncă nu există evaluări
- Examen Final Modulo 1 - PythonDocument3 paginiExamen Final Modulo 1 - PythonMiguel Angulo Loria0% (2)
- Graf PDFDocument27 paginiGraf PDFRoberto Martinez RamosÎncă nu există evaluări
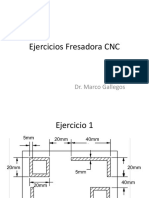
- CNC Exercises Milling SpanishDocument39 paginiCNC Exercises Milling SpanishDaniel UtreraÎncă nu există evaluări
- Manual Sistemas CAM CNC 2010Document42 paginiManual Sistemas CAM CNC 2010Lazaro Jose100% (1)
- Programación ParamétricaDocument24 paginiProgramación Paramétricajc7024Încă nu există evaluări
- Ejercicios de Torno en Codigos GDocument9 paginiEjercicios de Torno en Codigos GnenedjÎncă nu există evaluări
- 08 Simulacion Mecanizado PDFDocument42 pagini08 Simulacion Mecanizado PDFMiguel Lopa LazoÎncă nu există evaluări
- Presentacion CATIA PDFDocument15 paginiPresentacion CATIA PDFHenry AlvaradoÎncă nu există evaluări
- Manual Torno CNC Dyna 3300bDocument50 paginiManual Torno CNC Dyna 3300bJoel OchoaÎncă nu există evaluări
- Optimización AbapDocument25 paginiOptimización AbappacoÎncă nu există evaluări
- Diseño de Celdas RobóticasDocument5 paginiDiseño de Celdas RobóticasJuan Carlos Barberán MuñozÎncă nu există evaluări
- Centro de Maquinado Vertical CNCDocument121 paginiCentro de Maquinado Vertical CNCTamez Viera Roberto0% (1)
- Torno de Control NuméricoDocument16 paginiTorno de Control NuméricoJubert Angelo Ramos ParedesÎncă nu există evaluări
- Ejercicio CNC FresadoDocument12 paginiEjercicio CNC FresadoMecanizado SenaÎncă nu există evaluări
- Centro de Mecanizado Leadwell V 30Document4 paginiCentro de Mecanizado Leadwell V 30Jenny AndreaÎncă nu există evaluări
- Investigación Unidad 6 Programa de Cómputo Especial para SimulaciónDocument13 paginiInvestigación Unidad 6 Programa de Cómputo Especial para SimulaciónJulio Bautista33% (3)
- Mecanizado CNCDocument20 paginiMecanizado CNCJuan José González AyalaÎncă nu există evaluări
- Diseño de Celdas RobóticasDocument13 paginiDiseño de Celdas RobóticasMonse Acosta0% (1)
- Regla Simpson 1/3 C++Document10 paginiRegla Simpson 1/3 C++lachv346@hotmail.com100% (4)
- Cuestionario 1Document6 paginiCuestionario 1iivannqÎncă nu există evaluări
- Superficies CNCDocument489 paginiSuperficies CNCDanCha100% (1)
- Programacion Torno CNC Fagor 8050Document62 paginiProgramacion Torno CNC Fagor 8050Ju Ca100% (1)
- Manual CNCDocument27 paginiManual CNCMahonri AguilarÎncă nu există evaluări
- C10 - Programación CNCDocument11 paginiC10 - Programación CNCLuis TapiaÎncă nu există evaluări
- Material Didáctico CNC FranklinDocument84 paginiMaterial Didáctico CNC FranklinFranklin SanchezÎncă nu există evaluări
- Modificacion A La Antologia de La Asignatura de Control NumericoDocument400 paginiModificacion A La Antologia de La Asignatura de Control NumericoYomaliDelAngelÎncă nu există evaluări
- MANUAL TORNO CNC DYNA ADM 3300 EspañolDocument47 paginiMANUAL TORNO CNC DYNA ADM 3300 EspañolTomás Loya80% (5)
- Laboratorio C.N.CDocument14 paginiLaboratorio C.N.CAngie Melissa Cardenas BenavidesÎncă nu există evaluări
- MAC Aplicado A MaquinadosDocument34 paginiMAC Aplicado A Maquinadosice028Încă nu există evaluări
- Mecanizado en V5 PDFDocument55 paginiMecanizado en V5 PDFahistartio1100% (1)
- ANÁLISIS CINEMÁTICO DEL ROBOT FANUC ARC MATE 100icDocument18 paginiANÁLISIS CINEMÁTICO DEL ROBOT FANUC ARC MATE 100icJuan Ladino100% (1)
- Lista de Herramientas CNCDocument11 paginiLista de Herramientas CNCUbernot ClockretÎncă nu există evaluări
- Instrucciones Del Programa WinunisoftDocument24 paginiInstrucciones Del Programa WinunisoftRafael Perez MezaÎncă nu există evaluări
- Codigos G y MDocument7 paginiCodigos G y MEma Rangel EstradaÎncă nu există evaluări
- Moldes de Inyeccion de PlasticoDocument48 paginiMoldes de Inyeccion de PlasticoLeonardo Camarillo100% (3)
- Programacion de Maquinas CNCDocument13 paginiProgramacion de Maquinas CNCLuis BarriosÎncă nu există evaluări
- CMMDocument24 paginiCMMMIGUELTRX0% (1)
- Software CAM - MastercamDocument36 paginiSoftware CAM - Mastercammax_gonzález_8Încă nu există evaluări
- Simulacion de Corte de PiezasDocument29 paginiSimulacion de Corte de PiezasEufemioNoaChavezÎncă nu există evaluări
- 21 Teoría Del Mecanizado de MetalesDocument5 pagini21 Teoría Del Mecanizado de MetalesMiguel DominguezÎncă nu există evaluări
- Manual de Diseño Catia V5 R14Document135 paginiManual de Diseño Catia V5 R14Rob HerdezÎncă nu există evaluări
- Máquinas Herramientas de Control Numérico ComputarizadoDocument1 paginăMáquinas Herramientas de Control Numérico ComputarizadoBrayan SanchezÎncă nu există evaluări
- Manual de Prácticas 2 Cero MaquinaDocument8 paginiManual de Prácticas 2 Cero MaquinaCarlos Alfredo Diaz HernandezÎncă nu există evaluări
- Fresadora PractDocument15 paginiFresadora PractFrancisco Jiménez AlejandroÎncă nu există evaluări
- Fresadoras CNCDocument41 paginiFresadoras CNCGustavo Mesa100% (1)
- Diseño, Programación, y Manufactura de Equipos CNCDocument24 paginiDiseño, Programación, y Manufactura de Equipos CNCAndyÎncă nu există evaluări
- Catia 4 - Superficies BásicasDocument99 paginiCatia 4 - Superficies BásicasSolamente VossÎncă nu există evaluări
- Programación en CNC en Base A CAD y CAMDocument13 paginiProgramación en CNC en Base A CAD y CAMJose Fernandez100% (1)
- Unidad 3 CNCDocument32 paginiUnidad 3 CNCLuigi ChulimÎncă nu există evaluări
- Ejemplo de Aplicación Brochadora Laboratorio de MecanicaDocument1 paginăEjemplo de Aplicación Brochadora Laboratorio de MecanicaGABRIEL STELLAÎncă nu există evaluări
- Mastercam 19Document96 paginiMastercam 19jluis realÎncă nu există evaluări
- Centrode Maquinado Vertical CNC - CimDocument187 paginiCentrode Maquinado Vertical CNC - Cimnikoll1953Încă nu există evaluări
- Cero Maquina Cero Pieza FresadoraDocument7 paginiCero Maquina Cero Pieza FresadoraRaul GamboaÎncă nu există evaluări
- Investigar y Posteriormente Elaborar Un Escrito de Las Ventajas, Desventajas y Diferencias Entre Una Fresadora Manual y Una Fresadora CNCDocument3 paginiInvestigar y Posteriormente Elaborar Un Escrito de Las Ventajas, Desventajas y Diferencias Entre Una Fresadora Manual y Una Fresadora CNCFILEMON LIBORIOÎncă nu există evaluări
- Plan Del Mantniemiento FresadoraDocument24 paginiPlan Del Mantniemiento FresadoraJosé SalazarÎncă nu există evaluări
- CNCDocument44 paginiCNCRoberto Azcárate SánchezÎncă nu există evaluări
- Tutorial para Instalar Catia V6Document11 paginiTutorial para Instalar Catia V6ddcc3d3c2212100% (2)
- Actividad 1.3 Perez Gonzalez Juan Pablo, Hurtado Luna Cesar Ivan, Gonzalez Flores Feranndo JoseDocument8 paginiActividad 1.3 Perez Gonzalez Juan Pablo, Hurtado Luna Cesar Ivan, Gonzalez Flores Feranndo JoseFernando GonzálezÎncă nu există evaluări
- Reporte Modelos de Simulación T1Document13 paginiReporte Modelos de Simulación T1Juan RodriÎncă nu există evaluări
- Trabajo FinalDocument15 paginiTrabajo FinalAnsel OrikaniÎncă nu există evaluări
- Actividad IndividualDocument6 paginiActividad IndividualAndres Joel Guale GonzalezÎncă nu există evaluări
- Tarea Grupa Iii ParcialDocument15 paginiTarea Grupa Iii ParcialMarcio BustamanteÎncă nu există evaluări
- Metodologias de Desarrollo SoftwareDocument27 paginiMetodologias de Desarrollo SoftwareldamianlpÎncă nu există evaluări
- Investigación Ensamblador #1-Grupo 4Document13 paginiInvestigación Ensamblador #1-Grupo 4Raquel UmañaÎncă nu există evaluări
- Brochure Python FundamentalsDocument8 paginiBrochure Python FundamentalssolucionesempresarialeslachyÎncă nu există evaluări
- P1 Matlab GordilloDocument9 paginiP1 Matlab Gordillokatty silvaÎncă nu există evaluări
- Practicas Programacion Logica y FuncionalDocument4 paginiPracticas Programacion Logica y FuncionalEduardo Amaya0% (1)
- PolimorfismoDocument15 paginiPolimorfismoricardomore93100% (1)
- Gustavo Romero MarinDocument2 paginiGustavo Romero MarinAlejandro SepúlvedaÎncă nu există evaluări
- Informatica Parte II 2020Document44 paginiInformatica Parte II 2020CarlosAlbertoÎncă nu există evaluări
- Semana2 VIRFIA - PRN315 - U1 - GL - 1.3 - MEDocument12 paginiSemana2 VIRFIA - PRN315 - U1 - GL - 1.3 - MEKevin Ortega RodriguezÎncă nu există evaluări
- Procedimientos de AlmacenadoDocument45 paginiProcedimientos de AlmacenadoDiego CascoÎncă nu există evaluări
- Microsoft Word - Matlab Comandos BasicosDocument3 paginiMicrosoft Word - Matlab Comandos BasicosYas ValÎncă nu există evaluări
- Qué Es MongoDBDocument25 paginiQué Es MongoDBDANIELÎncă nu există evaluări
- Programa Curso AVANZADODocument3 paginiPrograma Curso AVANZADOuniversale24140Încă nu există evaluări
- Hoja de Ruta - Desarrollo WebDocument27 paginiHoja de Ruta - Desarrollo Webagustin lopezÎncă nu există evaluări
- Plan de Tesis 19.2 - Desposorio de La Cruz, José FernandoDocument10 paginiPlan de Tesis 19.2 - Desposorio de La Cruz, José FernandoFernando DesposorioÎncă nu există evaluări
- Bomba ForkDocument10 paginiBomba ForkMaya GerardoÎncă nu există evaluări
- Investigacion Clasificación de Base de DatosDocument8 paginiInvestigacion Clasificación de Base de DatosLuismiVeraÎncă nu există evaluări
- Module c1Document67 paginiModule c1Liam JJÎncă nu există evaluări
- Chuleta Linux ExamenDocument4 paginiChuleta Linux Examen4203955Încă nu există evaluări
- Cap NueveDocument11 paginiCap NueveMariana NavarroÎncă nu există evaluări
- Informe JacobiDocument3 paginiInforme JacobiMariana Lemos OjedaÎncă nu există evaluări
- Principios de AlgoritmosDocument3 paginiPrincipios de AlgoritmosJUNIOR ANTONIO CANAHUIRI ORDOÑEZÎncă nu există evaluări
- 1 - A Taller 2Document5 pagini1 - A Taller 2DANIEL FELIPE RODRIGUEZ GONZALEZÎncă nu există evaluări
- Curso de Asincronismo Con JavascriptDocument2 paginiCurso de Asincronismo Con JavascriptDiego EscobarÎncă nu există evaluări
- Guia Practica N 05 HerenciaDocument6 paginiGuia Practica N 05 HerenciaMaycol MoncadaÎncă nu există evaluări