S-ar putea să vă placă și
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11De la EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11Încă nu există evaluări
- 2dof 1Document122 pagini2dof 1wanpudinÎncă nu există evaluări
- Nonlinear Control Theory: Harry G. KwatnyDocument16 paginiNonlinear Control Theory: Harry G. KwatnyChernet TugeÎncă nu există evaluări
- SDOF - Free VibrationDocument12 paginiSDOF - Free VibrationPaul Bryan GuanÎncă nu există evaluări
- Ch4 PDFDocument31 paginiCh4 PDFRicardo ColosimoÎncă nu există evaluări
- Chapter 14: Vibration Generations Mechanisms: Self Excited VibrationDocument11 paginiChapter 14: Vibration Generations Mechanisms: Self Excited VibrationDr N NANDAKUMARÎncă nu există evaluări
- Spring Mass Couple PDFDocument52 paginiSpring Mass Couple PDFatiqah umairahÎncă nu există evaluări
- Notes MechV PDFDocument21 paginiNotes MechV PDFzamburittiÎncă nu există evaluări
- Introduction To System Modeling: Dynamic System Input U (T) Output y (T)Document19 paginiIntroduction To System Modeling: Dynamic System Input U (T) Output y (T)ettypasewangÎncă nu există evaluări
- Spring and Stiffness Mass or Inertia Elements Damping Simple Harmonic Motion Free Vibrations of SDOFDocument16 paginiSpring and Stiffness Mass or Inertia Elements Damping Simple Harmonic Motion Free Vibrations of SDOFCalebÎncă nu există evaluări
- Dynamic Force Analysis & Vibration in Machines Workshop at KauveryDocument132 paginiDynamic Force Analysis & Vibration in Machines Workshop at KauveryMoorthy GovindarajÎncă nu există evaluări
- Dynamics of StructuresDocument75 paginiDynamics of StructuresBhind Nijjar100% (1)
- Properties of MIMO LTI SystemsDocument8 paginiProperties of MIMO LTI SystemsTom KigeziÎncă nu există evaluări
- Chapter 1 & 2 - Introduction To Vibrations and Single DOF SystemsDocument86 paginiChapter 1 & 2 - Introduction To Vibrations and Single DOF SystemsMohamad Faiz TonyÎncă nu există evaluări
- Vibration and Vibration Damping Lecture NotesDocument23 paginiVibration and Vibration Damping Lecture NotesiangarvinsÎncă nu există evaluări
- STRC201 Sdof JMWBDocument99 paginiSTRC201 Sdof JMWBJura PateregaÎncă nu există evaluări
- Notes MechVDocument21 paginiNotes MechVhhgjgjhÎncă nu există evaluări
- Lecture 3 System ModelingDocument16 paginiLecture 3 System Modelinganon_412646200Încă nu există evaluări
- Undamped Free Vibration of Single Dof Systems: Dr.B.Santhosh Department of Mechanical EngineeringDocument3 paginiUndamped Free Vibration of Single Dof Systems: Dr.B.Santhosh Department of Mechanical EngineeringSREENATH S.SÎncă nu există evaluări
- Chapter III PDFDocument68 paginiChapter III PDFJinho JungÎncă nu există evaluări
- 4-VB Coulomb DampingDocument9 pagini4-VB Coulomb DampingpietzdeoÎncă nu există evaluări
- Note 5Document14 paginiNote 5MohamedÎncă nu există evaluări
- Bda31103 Lect02 - 1 Dof Part1Document20 paginiBda31103 Lect02 - 1 Dof Part1Ong Kok MengÎncă nu există evaluări
- 5D9EBCCBA7D02Document31 pagini5D9EBCCBA7D02hmanghh2000Încă nu există evaluări
- 01 Automatic Control System Modeling and RepresentationDocument55 pagini01 Automatic Control System Modeling and RepresentationPaul BonaÎncă nu există evaluări
- Lecture 13Document41 paginiLecture 13Mohamad AsrulÎncă nu există evaluări
- 3.6 Application-Forced Spring Mass Systems and Resonance: External ExternalDocument11 pagini3.6 Application-Forced Spring Mass Systems and Resonance: External ExternalTushar GuptaÎncă nu există evaluări
- HET312 NotesDocument41 paginiHET312 NotesTing SamuelÎncă nu există evaluări
- Asymmetric Mathieu EquationsDocument18 paginiAsymmetric Mathieu Equationsamol maratheÎncă nu există evaluări
- Vibration Sec 1Document6 paginiVibration Sec 1Andy LimÎncă nu există evaluări
- Motor Control: Operator Input Power SupplyDocument27 paginiMotor Control: Operator Input Power Supplykubu2689Încă nu există evaluări
- 5.6 Unforced Mechanical Vibrations: Simple Harmonic MotionDocument8 pagini5.6 Unforced Mechanical Vibrations: Simple Harmonic MotionHaridev MoorthyÎncă nu există evaluări
- w07d2 Class 17Document25 paginiw07d2 Class 17eviroyerÎncă nu există evaluări
- Ept474 2dofDocument118 paginiEpt474 2dofLeon OoÎncă nu există evaluări
- 19 Jacobian Linearizations, Equilibrium PointsDocument32 pagini19 Jacobian Linearizations, Equilibrium Pointsdugan@ChoÎncă nu există evaluări
- Ee580 Notes PDFDocument119 paginiEe580 Notes PDFnageshÎncă nu există evaluări
- Chapt 3 FrenchDocument61 paginiChapt 3 FrenchSaurabh BorseÎncă nu există evaluări
- Control Systems PDFDocument24 paginiControl Systems PDFlum_78Încă nu există evaluări
- STRC201 Sdof JMWB PDFDocument99 paginiSTRC201 Sdof JMWB PDFAkash ChandraÎncă nu există evaluări
- 1 Single Degree of Freedom (SDOF) Systems: James MW Brownjohn, University of Plymouth, January 2005Document99 pagini1 Single Degree of Freedom (SDOF) Systems: James MW Brownjohn, University of Plymouth, January 2005Amandeep SinghÎncă nu există evaluări
- Unit 1 - Control System - WWW - Rgpvnotes.inDocument12 paginiUnit 1 - Control System - WWW - Rgpvnotes.invikram singhÎncă nu există evaluări
- HW 4Document2 paginiHW 4YehhÎncă nu există evaluări
- Dynamic Charactorstics of An InstrumentsDocument30 paginiDynamic Charactorstics of An InstrumentsDhinakaran VeemanÎncă nu există evaluări
- Stability of Feedback Control SystemsDocument31 paginiStability of Feedback Control Systemsjackngare99Încă nu există evaluări
- Non Linear Optimal Swing Up of An Inverted Pendulum On A Cart Using Pontryagin's Principle With Fixed Final TimeDocument8 paginiNon Linear Optimal Swing Up of An Inverted Pendulum On A Cart Using Pontryagin's Principle With Fixed Final TimeMatteo RocchiÎncă nu există evaluări
- 10 Harmonic OscillatorDocument133 pagini10 Harmonic OscillatorrohitÎncă nu există evaluări
- Spring Mass System: Applications of Linear Differential EquationsDocument19 paginiSpring Mass System: Applications of Linear Differential Equationsskip skipÎncă nu există evaluări
- Section1 10Document17 paginiSection1 10sonti11Încă nu există evaluări
- MCG 4308 Lec 4Document25 paginiMCG 4308 Lec 4Nadjet AkloucheÎncă nu există evaluări
- MCG 4308 Lec 4Document25 paginiMCG 4308 Lec 4Nadjet AkloucheÎncă nu există evaluări
- Fyp-Ppt oDocument66 paginiFyp-Ppt oAnupam SonarÎncă nu există evaluări
- Simple Mass Spring SystemDocument11 paginiSimple Mass Spring SystemArindam MondalÎncă nu există evaluări
- рисунки PDFDocument18 paginiрисунки PDFLeo KutsÎncă nu există evaluări
- @kul 2 SHM - Circular - EnergiDocument31 pagini@kul 2 SHM - Circular - EnergiLalitakuÎncă nu există evaluări
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetDe la EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetÎncă nu există evaluări
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetDe la EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetEvaluare: 2 din 5 stele2/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetDe la EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetÎncă nu există evaluări
- General Tolerances DIN ISO 2768Document2 paginiGeneral Tolerances DIN ISO 2768Vasil Gospodinov79% (24)
- Siemens CNC Userguide PDFDocument150 paginiSiemens CNC Userguide PDFmihay_sms50% (2)
- Basic Mechanical Principals For Fourth Graders Final IterationDocument19 paginiBasic Mechanical Principals For Fourth Graders Final IterationGia BeÎncă nu există evaluări
- Importing 3d Model Into MastercamDocument20 paginiImporting 3d Model Into MastercamMarsono Bejo SuwitoÎncă nu există evaluări
- TVET Quality Assurance Manual in EnglishDocument56 paginiTVET Quality Assurance Manual in EnglishGia Be50% (2)
- HNCD Engineering UnitsDocument375 paginiHNCD Engineering UnitsKrista JacksonÎncă nu există evaluări
- Basic of Mechanical EngeneeringDocument144 paginiBasic of Mechanical Engeneeringjhny4444Încă nu există evaluări
- How To Write A Design ReportDocument9 paginiHow To Write A Design ReportRuxandra GradinaruÎncă nu există evaluări
- 7 Design ReportDocument2 pagini7 Design ReportGeet_D0% (1)
- 1.2 Beams and Columns: Chapter 1-Static Engineering SystemsDocument13 pagini1.2 Beams and Columns: Chapter 1-Static Engineering SystemsGia BeÎncă nu există evaluări
- Basic of Mechanical EngeneeringDocument144 paginiBasic of Mechanical Engeneeringjhny4444Încă nu există evaluări
- CrackDocument1 paginăCrackGia BeÎncă nu există evaluări
- Final ReportDocument3 paginiFinal ReportGia BeÎncă nu există evaluări
- 4 Mechanical PrincipleDocument6 pagini4 Mechanical PrincipleGia BeÎncă nu există evaluări
- 319150Document2 pagini319150Gia BeÎncă nu există evaluări
- E Sciencelesson1 121105211734 Phpapp01Document47 paginiE Sciencelesson1 121105211734 Phpapp01Gia BeÎncă nu există evaluări
- ME321 Notes 1Document10 paginiME321 Notes 1SamuelHericÎncă nu există evaluări
- Unigraphics NX7 SyllabusDocument5 paginiUnigraphics NX7 SyllabusIhas DiggsÎncă nu există evaluări
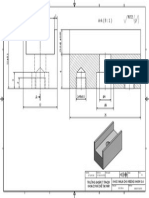
- Khuon Co Dinh TR NG HSPKT TPHCM: 1:2 Ts. PH M S N Minh Ki M Tra: L Tuyngio Thitk: PH Duy T: NG Y: T LDocument1 paginăKhuon Co Dinh TR NG HSPKT TPHCM: 1:2 Ts. PH M S N Minh Ki M Tra: L Tuyngio Thitk: PH Duy T: NG Y: T LGia BeÎncă nu există evaluări
- Solucionario de Estatica de Beer 9 EdicionDocument182 paginiSolucionario de Estatica de Beer 9 EdicionAristoteles Carreño73% (26)
- Creo Parametric ManualDocument105 paginiCreo Parametric ManualDanilo BorgesÎncă nu există evaluări
- Indexable Inserts PCD (7°) : N N N N NDocument1 paginăIndexable Inserts PCD (7°) : N N N N NGia BeÎncă nu există evaluări
- 354760Document1 pagină354760Gia BeÎncă nu există evaluări
- Roundtest Ra-220: Compact Roundness MeasurementDocument8 paginiRoundtest Ra-220: Compact Roundness MeasurementGia BeÎncă nu există evaluări
- Injection MoldingDocument12 paginiInjection MoldingGia BeÎncă nu există evaluări
- Asme b1.20.1 NPT ThreadsDocument1 paginăAsme b1.20.1 NPT ThreadsGabriel Arghiriade100% (1)
- Industrial Composites GuideDocument16 paginiIndustrial Composites GuideGia BeÎncă nu există evaluări
- TR NG HSPKT TPHCM Khoi Nhua Cho Mieng Nhom 0.4: Ts. PH M S N Minh Ki M Tra: L Tuyngio Thitk: PH Duy T: NG Y: T L: 8:1Document1 paginăTR NG HSPKT TPHCM Khoi Nhua Cho Mieng Nhom 0.4: Ts. PH M S N Minh Ki M Tra: L Tuyngio Thitk: PH Duy T: NG Y: T L: 8:1Gia BeÎncă nu există evaluări
- ANSI-ASME B1.20.1 STD For Pipe - Threads 2Document1 paginăANSI-ASME B1.20.1 STD For Pipe - Threads 2Dinesh PerumalsamyÎncă nu există evaluări
- Tutorial - II EEU 08106Document2 paginiTutorial - II EEU 08106alibdi294Încă nu există evaluări
- Review Pde RBFDocument15 paginiReview Pde RBFCristhian Paúl Neyra SalvadorÎncă nu există evaluări
- A Numerical Approach To The Analysis of Circular Cylindrical Water TanksDocument5 paginiA Numerical Approach To The Analysis of Circular Cylindrical Water TanksJosué Azurín RendichÎncă nu există evaluări
- College of Engineering Pune Ordinary Differential Equations and Multivariate Calculus Tutorial-1 (2019-2020)Document3 paginiCollege of Engineering Pune Ordinary Differential Equations and Multivariate Calculus Tutorial-1 (2019-2020)AlaiaÎncă nu există evaluări
- Bài giảng Tuấn Anh Chap 2 EDocument78 paginiBài giảng Tuấn Anh Chap 2 Echivl4.hmcÎncă nu există evaluări
- 13sp Mas201 FinalDocument13 pagini13sp Mas201 FinalHuan Luu MinhÎncă nu există evaluări
- MAT213 Course CompactDocument4 paginiMAT213 Course CompacttayoÎncă nu există evaluări
- Seatwork 3 2M1 Laplace ElementaryDocument2 paginiSeatwork 3 2M1 Laplace ElementaryEugine Paul RamboyonÎncă nu există evaluări
- Numerical Methods With ApplicationsDocument59 paginiNumerical Methods With Applicationsrazlan ghazaliÎncă nu există evaluări
- Second Order Differential Equations - Dynamics - 2020Document13 paginiSecond Order Differential Equations - Dynamics - 2020rory mcelhinneyÎncă nu există evaluări
- Aryan Kohli BmsDocument37 paginiAryan Kohli BmsAryan KohliÎncă nu există evaluări
- 22mat11 (2023-24) Module - 3 Partial DifferentiationDocument25 pagini22mat11 (2023-24) Module - 3 Partial Differentiationzwq4rrkkq8Încă nu există evaluări
- Lecture 2 Numeric Solution of Differential EquationsDocument45 paginiLecture 2 Numeric Solution of Differential EquationsManuelÎncă nu există evaluări
- A Compact Course On Linear PDEs by Alberto ValliDocument238 paginiA Compact Course On Linear PDEs by Alberto ValliAmai KinonoÎncă nu există evaluări
- Partial DifferentiationDocument2 paginiPartial DifferentiationRose BaluconÎncă nu există evaluări
- Mathematics Partial Differential EquationDocument2 paginiMathematics Partial Differential Equationankita kurwaleÎncă nu există evaluări
- Dela ReviewDocument1 paginăDela ReviewRavindr KumarÎncă nu există evaluări
- Associated Laguerre Differential EquationDocument6 paginiAssociated Laguerre Differential EquationLord Sir. Prince KhanÎncă nu există evaluări
- Apm3711 2021 TL 201 3 e 35577Document13 paginiApm3711 2021 TL 201 3 e 35577rain wilsonÎncă nu există evaluări
- R161102, M I, May-2017 PDFDocument4 paginiR161102, M I, May-2017 PDFbvs957946Încă nu există evaluări
- Laplace TransformationDocument48 paginiLaplace TransformationGail Nathalie LiraÎncă nu există evaluări
- Engineering Mathematics - Mak 501E: Department of Mechanical EngineeringDocument2 paginiEngineering Mathematics - Mak 501E: Department of Mechanical EngineeringHatice TurhanÎncă nu există evaluări
- An Invariance Principle in The Theory of StabilityDocument12 paginiAn Invariance Principle in The Theory of StabilitycastrojpÎncă nu există evaluări
- Differential Equations - Introduction PDFDocument35 paginiDifferential Equations - Introduction PDFVincent Allen Corbilla IIÎncă nu există evaluări
- Runge-Kutta 4 Order Method: Example: K DT DDocument10 paginiRunge-Kutta 4 Order Method: Example: K DT DJhun Dhon Mari Abihay100% (1)
- MAE 316 Main Project: November 15, 2018Document1 paginăMAE 316 Main Project: November 15, 2018cristobalÎncă nu există evaluări
- Partial Differential Equations: The Heat EquationDocument19 paginiPartial Differential Equations: The Heat EquationBudi SajaÎncă nu există evaluări
- 1.1 Definitions and TerminologyDocument9 pagini1.1 Definitions and TerminologyIzzati KamalÎncă nu există evaluări
- Ps Trigonometric Equations-IDocument3 paginiPs Trigonometric Equations-IAtulÎncă nu există evaluări
- Torsion of Rods and Tubes ApparatusDocument22 paginiTorsion of Rods and Tubes ApparatusMiguel Reyes AvilaÎncă nu există evaluări