S-ar putea să vă placă și
- Toyota GD Series Diesel Engines: Eugenio, 77Document16 paginiToyota GD Series Diesel Engines: Eugenio, 77Sutikno100% (4)
- PowerFactory EMT Model2Document14 paginiPowerFactory EMT Model2Ratana KemÎncă nu există evaluări
- PSCAD Course Notes 01Document72 paginiPSCAD Course Notes 01pcumaxÎncă nu există evaluări
- Load Flow Basic Principles DigsilentDocument17 paginiLoad Flow Basic Principles Digsilentjcrodriguez83100% (2)
- PSSE Intro Stabilty InstructionsDocument4 paginiPSSE Intro Stabilty Instructionspuja_shinde9Încă nu există evaluări
- Tone ReportDocument58 paginiTone ReportchuchisÎncă nu există evaluări
- Aero Gener AdoresDocument39 paginiAero Gener AdoresRosa María De Anda Lopez100% (1)
- Cap Screws: Sae J429 Grade IdentificationDocument6 paginiCap Screws: Sae J429 Grade IdentificationHomer SilvaÎncă nu există evaluări
- TechRef Cable ModellingDocument8 paginiTechRef Cable ModellingxolraxÎncă nu există evaluări
- Knowledge is "Real Power": Introduction to Power QualityDe la EverandKnowledge is "Real Power": Introduction to Power QualityÎncă nu există evaluări
- LECTURE 5 Cor 1Document44 paginiLECTURE 5 Cor 1teamrelax75% (4)
- Training PSSE Analisis Dinamico Avanzado 31oct Al 04nov 2011Document31 paginiTraining PSSE Analisis Dinamico Avanzado 31oct Al 04nov 2011Carlos Rodas100% (1)
- DPL TutorialDocument54 paginiDPL TutorialDaniel Tuncar100% (1)
- Python BasedDocument24 paginiPython Basedkra_amÎncă nu există evaluări
- Distribution System ETAP ModelingDocument64 paginiDistribution System ETAP ModelingAwgichwAsefaÎncă nu există evaluări
- Power Factory ManualDocument190 paginiPower Factory Manualkriznar100% (1)
- Example of Over Current Protection Setting Using DIgSILENT PowerFactoryDocument23 paginiExample of Over Current Protection Setting Using DIgSILENT PowerFactorySemih Cem İlik100% (4)
- OpenDSS Level 2 TrainingDocument79 paginiOpenDSS Level 2 TrainingMish MalkÎncă nu există evaluări
- GPU Programming in MATLABDocument6 paginiGPU Programming in MATLABkhaardÎncă nu există evaluări
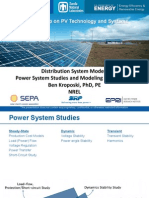
- Distribution System ModelsDocument21 paginiDistribution System Modelsrobert1234567m100% (1)
- PSSE 2nd Generation Wind Models Final JayDocument32 paginiPSSE 2nd Generation Wind Models Final Jayhizbi7100% (1)
- Monitoring and Control of Electrical Power Systems using Machine Learning TechniquesDe la EverandMonitoring and Control of Electrical Power Systems using Machine Learning TechniquesEmilio Barocio EspejoÎncă nu există evaluări
- PSCAD Resolving IssuesDocument227 paginiPSCAD Resolving IssuesphieuxuatkhoÎncă nu există evaluări
- 06 IRENA Additional ExercisesDocument30 pagini06 IRENA Additional Exercisesmrivero1983Încă nu există evaluări
- 07 Koolhaas Downtown Athletic ClubDocument10 pagini07 Koolhaas Downtown Athletic ClubAndreea DituÎncă nu există evaluări
- PSCAD IntroductionDocument73 paginiPSCAD IntroductionPrazetyo Adi NugrohoÎncă nu există evaluări
- Rainwater and Stormwater Harvesting Systems: Continuing Education From The American Society of Plumbing EngineersDocument8 paginiRainwater and Stormwater Harvesting Systems: Continuing Education From The American Society of Plumbing Engineers185412Încă nu există evaluări
- Introduction To Power System Simulator For EngineeringDocument1.048 paginiIntroduction To Power System Simulator For Engineeringpirindola123Încă nu există evaluări
- SEC StdsDocument65 paginiSEC Stdserson1981Încă nu există evaluări
- Ms6001b Operation DescriptionDocument53 paginiMs6001b Operation Descriptionprasad503486% (7)
- Real-Time Simulation Technology for Modern Power ElectronicsDe la EverandReal-Time Simulation Technology for Modern Power ElectronicsÎncă nu există evaluări
- MasterThesis Basem Idlbi (Document119 paginiMasterThesis Basem Idlbi (GuruxyzÎncă nu există evaluări
- PSCAD TutorialDocument42 paginiPSCAD Tutorialchenukap100% (1)
- PowerFactory EMT Model1Document7 paginiPowerFactory EMT Model1Ratana KemÎncă nu există evaluări
- PSCAPSCAD Wind Power TrainingDocument36 paginiPSCAPSCAD Wind Power TrainingЛадо КиладзеÎncă nu există evaluări
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsDe la EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsÎncă nu există evaluări
- Pdca Cycle Problem SolvedDocument3 paginiPdca Cycle Problem Solvedjose luisÎncă nu există evaluări
- Importing Ground Grid From AutoCAD PDFDocument7 paginiImporting Ground Grid From AutoCAD PDFVasudevan KunjithapathamÎncă nu există evaluări
- Dynamic Estimation and Control of Power SystemsDe la EverandDynamic Estimation and Control of Power SystemsÎncă nu există evaluări
- TR7 TP133 Full Content Part1 مهمDocument100 paginiTR7 TP133 Full Content Part1 مهمqais652002100% (1)
- En Wind Turbine Generators 2009Document22 paginiEn Wind Turbine Generators 2009evotavaÎncă nu există evaluări
- 3D Photovoltaic Devices Complete Self-Assessment GuideDe la Everand3D Photovoltaic Devices Complete Self-Assessment GuideÎncă nu există evaluări
- S2018.0618.go HVDCDocument17 paginiS2018.0618.go HVDCFranklin Simeon PucuhuaylaÎncă nu există evaluări
- PSCAD Cookbook Induction Machines: Manitoba HVDC Research CentreDocument27 paginiPSCAD Cookbook Induction Machines: Manitoba HVDC Research CentreLucas FreireÎncă nu există evaluări
- Cable TutorialDocument22 paginiCable TutorialRodriguez Villalobos Nelson100% (4)
- ESB Networks Contractor Safety RegulationsDocument68 paginiESB Networks Contractor Safety RegulationsvhlactaotaoÎncă nu există evaluări
- Development and Analysis of Nordic32 Power System Model in PowerFactoryDocument77 paginiDevelopment and Analysis of Nordic32 Power System Model in PowerFactorybubo28100% (1)
- Dynamic Modelling (DSL Workshop)Document5 paginiDynamic Modelling (DSL Workshop)Davor Junušić0% (1)
- PESTR18Document390 paginiPESTR18Julio CésarÎncă nu există evaluări
- ModelsDocument716 paginiModelsshyamda100% (2)
- Integration of Green and Renewable Energy in Electric Power SystemsDe la EverandIntegration of Green and Renewable Energy in Electric Power SystemsÎncă nu există evaluări
- PSCAD Based Dynamic ModelingDocument7 paginiPSCAD Based Dynamic ModelingLalith KrishnanÎncă nu există evaluări
- Appendix PowerFactory Model - V601aDocument34 paginiAppendix PowerFactory Model - V601aAlberto JimenezÎncă nu există evaluări
- 05 IRENA ExercisesDocument31 pagini05 IRENA Exercisesibookmarkx100% (2)
- PSCAD Introduction PDFDocument72 paginiPSCAD Introduction PDFcamzy017Încă nu există evaluări
- AC DC AcDocument3 paginiAC DC AcPhani KumarÎncă nu există evaluări
- TechRef SynchronousMachineDocument35 paginiTechRef SynchronousMachinexvehicleÎncă nu există evaluări
- P1567 AIT Wechselrichter RevD enDocument18 paginiP1567 AIT Wechselrichter RevD enJonathan Sebastian SalinasÎncă nu există evaluări
- SimulationPerformance 15.2 en r1596 PDFDocument25 paginiSimulationPerformance 15.2 en r1596 PDFJennifer CharlesÎncă nu există evaluări
- TechRef Overhead Line ModelsDocument12 paginiTechRef Overhead Line ModelsLalo PatoÎncă nu există evaluări
- Relay IndexDocument15 paginiRelay IndexDavid Rodrigo RodrigoÎncă nu există evaluări
- DIgSILENT TechRef Common ImpedanceDocument8 paginiDIgSILENT TechRef Common ImpedanceАлишер ГалиевÎncă nu există evaluări
- Lab Report Rotary CompleteDocument22 paginiLab Report Rotary CompleteSyed Farid100% (1)
- Cw1 (Part1) BriefDocument3 paginiCw1 (Part1) Briefoussama sadkiÎncă nu există evaluări
- 5807 Simulink TutorialDocument31 pagini5807 Simulink TutorialSureshÎncă nu există evaluări
- 08 - Stability Exercises v1.5Document66 pagini08 - Stability Exercises v1.5asnovitasariduhriÎncă nu există evaluări
- Lab 6Document6 paginiLab 6hareesh.makesuÎncă nu există evaluări
- Session 2: Basic Operation and Analysis of A DC/DC ConverterDocument10 paginiSession 2: Basic Operation and Analysis of A DC/DC ConverterSanty LeónÎncă nu există evaluări
- Openloop Motor ModelingDocument16 paginiOpenloop Motor ModelingUmair RazaÎncă nu există evaluări
- Closed Loop Operation of Buck DC-DC Converter Using Discrete Pi ControlDocument4 paginiClosed Loop Operation of Buck DC-DC Converter Using Discrete Pi ControlPrajeesh PrakashÎncă nu există evaluări
- ELEC30x0 Lab8Document6 paginiELEC30x0 Lab8Lûtwàmä JôëÎncă nu există evaluări
- Dfig PDFDocument12 paginiDfig PDFAhmed WestministerÎncă nu există evaluări
- Dynamic Stability of A Microgrid With An Active LoadDocument13 paginiDynamic Stability of A Microgrid With An Active LoadAhmed WestministerÎncă nu există evaluări
- Optimal Design of Microgrids in Autonomous and Grid-Connected Modes Using Particle Swarm OptimizationDocument15 paginiOptimal Design of Microgrids in Autonomous and Grid-Connected Modes Using Particle Swarm OptimizationAhmed WestministerÎncă nu există evaluări
- Investigation of Microgrids With Both Inverter Interfaced and Direct AC-Connected Distributed Energy ResourcesDocument9 paginiInvestigation of Microgrids With Both Inverter Interfaced and Direct AC-Connected Distributed Energy ResourcesAhmed WestministerÎncă nu există evaluări
- Ieee76b8073a Ed83 20160227121547 PDFDocument13 paginiIeee76b8073a Ed83 20160227121547 PDFSani1248Încă nu există evaluări
- Small-Signal Stability Analysis of A DFIG-Based Wind Power System Under Different Modes of OperationDocument11 paginiSmall-Signal Stability Analysis of A DFIG-Based Wind Power System Under Different Modes of OperationAhmed WestministerÎncă nu există evaluări
- Installed Capacity Selection of Hybrid Energy Generation System Via Improved Particle-Swarm-OptimisationDocument11 paginiInstalled Capacity Selection of Hybrid Energy Generation System Via Improved Particle-Swarm-OptimisationAhmed WestministerÎncă nu există evaluări
- Li2013 PDFDocument10 paginiLi2013 PDFSamundra GurungÎncă nu există evaluări
- Improving Sustainability of Hybrid Energy Systems Part I: Incorporating Battery Round-Trip Efficiency and Operational Cost FactorsDocument9 paginiImproving Sustainability of Hybrid Energy Systems Part I: Incorporating Battery Round-Trip Efficiency and Operational Cost FactorsAhmed WestministerÎncă nu există evaluări
- Energy Management and Operational Planning of A Microgrid With A PV-Based Active Generator For Smart Grid ApplicationsDocument10 paginiEnergy Management and Operational Planning of A Microgrid With A PV-Based Active Generator For Smart Grid ApplicationsAhmed WestministerÎncă nu există evaluări
- Analysis of Battery Lifetime Extension in A Small-Scale Wind-Energy System Using SupercapacitorsDocument10 paginiAnalysis of Battery Lifetime Extension in A Small-Scale Wind-Energy System Using SupercapacitorsAhmed WestministerÎncă nu există evaluări
- Multicriteria Design of Hybrid Power Generation Systems Based On A Modified Particle Swarm Optimization AlgorithmDocument10 paginiMulticriteria Design of Hybrid Power Generation Systems Based On A Modified Particle Swarm Optimization AlgorithmAhmed WestministerÎncă nu există evaluări
- Improving Sustainability of Hybrid Energy Systems Part II: Managing Multiple Objectives With A Multiagent SystemDocument9 paginiImproving Sustainability of Hybrid Energy Systems Part II: Managing Multiple Objectives With A Multiagent SystemAhmed WestministerÎncă nu există evaluări
- Compensation For The Power Fluctuation of The Large Scale Wind Farm Using Hybrid Energy Storage ApplicationsDocument4 paginiCompensation For The Power Fluctuation of The Large Scale Wind Farm Using Hybrid Energy Storage ApplicationsAhmed WestministerÎncă nu există evaluări
- Impact of Distributed Generations With Energy Storage Devices On The Electric GridDocument8 paginiImpact of Distributed Generations With Energy Storage Devices On The Electric GridAhmed WestministerÎncă nu există evaluări
- Stochastic Performance Assessment and Sizing For A Hybrid Power System of Solar/Wind/Energy StorageDocument9 paginiStochastic Performance Assessment and Sizing For A Hybrid Power System of Solar/Wind/Energy StorageAhmed WestministerÎncă nu există evaluări
- X XXXX ImportantDocument8 paginiX XXXX ImportantAhmed WestministerÎncă nu există evaluări
- Optimal Sizing of Hybrid Wind/PV/Diesel Generation in A Stand-Alone Power System Using Markov-Based Genetic AlgorithmDocument8 paginiOptimal Sizing of Hybrid Wind/PV/Diesel Generation in A Stand-Alone Power System Using Markov-Based Genetic AlgorithmAhmed WestministerÎncă nu există evaluări
- Impact of Distributed Generations With Energy Storage Devices On The Electric GridDocument8 paginiImpact of Distributed Generations With Energy Storage Devices On The Electric GridAhmed WestministerÎncă nu există evaluări
- Genetic-Algorithm-Based Optimization Approach For Energy ManagementDocument9 paginiGenetic-Algorithm-Based Optimization Approach For Energy ManagementAhmed WestministerÎncă nu există evaluări
- Neural-Network-Based MPPT Control of A Stand-Alone Hybrid Power Generation SystemDocument11 paginiNeural-Network-Based MPPT Control of A Stand-Alone Hybrid Power Generation SystemAhmed WestministerÎncă nu există evaluări
- PDFDocument12 paginiPDFel_ruso__83Încă nu există evaluări
- Energy Management and Power Control of A Hybrid Active Wind Generator For Distributed Power Generation and Grid IntegrationDocument10 paginiEnergy Management and Power Control of A Hybrid Active Wind Generator For Distributed Power Generation and Grid IntegrationAhmed WestministerÎncă nu există evaluări
- Multicriteria Optimal Sizing of Photovoltaic-Wind Turbine Grid Connected SystemsDocument10 paginiMulticriteria Optimal Sizing of Photovoltaic-Wind Turbine Grid Connected Systemsel_ruso__83Încă nu există evaluări
- 1-s2.0-S0306261 - Rating Ratio PDFDocument13 pagini1-s2.0-S0306261 - Rating Ratio PDFAhmed WestministerÎncă nu există evaluări
- On Mitigating Wind Energy Variability With Storage: Vijay Arya, Partha Dutta, Shivkumar KalyanaramanDocument9 paginiOn Mitigating Wind Energy Variability With Storage: Vijay Arya, Partha Dutta, Shivkumar KalyanaramanAhmed WestministerÎncă nu există evaluări
- Public Consultation Phase 1 Summary Document FinalDocument4 paginiPublic Consultation Phase 1 Summary Document FinalAhmed WestministerÎncă nu există evaluări
- Time-Series-Based Maximization of Distributed Wind Power Generation IntegrationDocument7 paginiTime-Series-Based Maximization of Distributed Wind Power Generation IntegrationAhmed WestministerÎncă nu există evaluări
- Regulation of Distribution Network Voltage Using Dispersed Battery Storage Systems: A Case Study of A Rural NetworkDocument8 paginiRegulation of Distribution Network Voltage Using Dispersed Battery Storage Systems: A Case Study of A Rural NetworkAhmed WestministerÎncă nu există evaluări
- MikroGrid ManagementDocument12 paginiMikroGrid ManagementDimitris KostopoulosÎncă nu există evaluări
- Control Lab ReportDocument11 paginiControl Lab ReportMariamMunirAhmad100% (1)
- C Ds Unit - II NotesDocument50 paginiC Ds Unit - II NotesAshish ThirunagariÎncă nu există evaluări
- Notificatio N (Rese Rvation) Gove Rnment: A Cu) UTDocument1 paginăNotificatio N (Rese Rvation) Gove Rnment: A Cu) UT122-Ayush Kumar ParganihaÎncă nu există evaluări
- Grasshopper Optimization Algorithm Based Design of StructuresDocument1 paginăGrasshopper Optimization Algorithm Based Design of Structuresinvisible25Încă nu există evaluări
- Tally Erp 9.0 Material Control Centre in Tally Erp 9.0Document27 paginiTally Erp 9.0 Material Control Centre in Tally Erp 9.0Raghavendra yadav KMÎncă nu există evaluări
- HSE-Acoustic & Fire DoorsDocument6 paginiHSE-Acoustic & Fire DoorsInterior ProjectsÎncă nu există evaluări
- DataDocument194 paginiDataddlaluÎncă nu există evaluări
- A Primer On Spray Drying Chemical Engineering Nov09Document7 paginiA Primer On Spray Drying Chemical Engineering Nov09Hikmah Triana HadiÎncă nu există evaluări
- Calculating The Maximum Attenuation For Optical Fiber LinksDocument5 paginiCalculating The Maximum Attenuation For Optical Fiber LinksMiguel LiceagaÎncă nu există evaluări
- Random PDFDocument15 paginiRandom PDFgreeblemeebleÎncă nu există evaluări
- FORM Inspection Test Plan MMPDocument8 paginiFORM Inspection Test Plan MMPRicky Stormbringer ChristianÎncă nu există evaluări
- Important RCC Questions-Short and LongDocument15 paginiImportant RCC Questions-Short and LongmailjoelsamuelÎncă nu există evaluări
- Pacom S72724+PDR32-RMT-HYB+ManualDocument130 paginiPacom S72724+PDR32-RMT-HYB+ManualDavidChisholmÎncă nu există evaluări
- Gas Technology Institute PresentationDocument14 paginiGas Technology Institute PresentationAris KancilÎncă nu există evaluări
- 82 To 88 CompleteDocument6 pagini82 To 88 CompleteUmer KhanÎncă nu există evaluări
- TXL 025 12s Datasheet 1 en PDFDocument11 paginiTXL 025 12s Datasheet 1 en PDFJulianCitoÎncă nu există evaluări
- Hanro Tools Incorporation Delhi IndiaDocument10 paginiHanro Tools Incorporation Delhi IndiaHanro Tools IncorporationÎncă nu există evaluări
- Developer For System Z: Quick Start GuideDocument2 paginiDeveloper For System Z: Quick Start GuideUmesha GowdaÎncă nu există evaluări