S-ar putea să vă placă și
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- An Enhanced Droop Control Method For Accurate Load Sharing and Voltage Improvement of Isolated and Interconnected DC MicrogridsDocument11 paginiAn Enhanced Droop Control Method For Accurate Load Sharing and Voltage Improvement of Isolated and Interconnected DC MicrogridsRiad TifaÎncă nu există evaluări
- 10 1109@tie 2017 2698425 PDFDocument12 pagini10 1109@tie 2017 2698425 PDFRiad TifaÎncă nu există evaluări
- Control Engineering Practice: Youssef Krim, Dhaker Abbes, Saber Krim, Mohamed Faouzi MimouniDocument16 paginiControl Engineering Practice: Youssef Krim, Dhaker Abbes, Saber Krim, Mohamed Faouzi MimouniRiad TifaÎncă nu există evaluări
- 74 Adaptive Decentralized Droop ControllerDocument11 pagini74 Adaptive Decentralized Droop ControllerRiad TifaÎncă nu există evaluări
- Control Engineering Practice: Youssef Krim, Dhaker Abbes, Saber Krim, Mohamed Faouzi MimouniDocument16 paginiControl Engineering Practice: Youssef Krim, Dhaker Abbes, Saber Krim, Mohamed Faouzi MimouniRiad TifaÎncă nu există evaluări
- 10 1109@tie 2017 2698425 PDFDocument12 pagini10 1109@tie 2017 2698425 PDFRiad TifaÎncă nu există evaluări
- Tertiary and Secondary Control Levels For Efficiency Optimization and System Damping in Droop Controlled DC-DC ConvertersDocument12 paginiTertiary and Secondary Control Levels For Efficiency Optimization and System Damping in Droop Controlled DC-DC ConvertersRiad TifaÎncă nu există evaluări
- Homer PaperDocument13 paginiHomer PaperRiad TifaÎncă nu există evaluări
- Design of Solar Water Pumping System With FCMA Soft StarterDocument4 paginiDesign of Solar Water Pumping System With FCMA Soft StarterRiad TifaÎncă nu există evaluări
- Economic Comparison of Solar PV and Diesel Water Pumping SystemDocument6 paginiEconomic Comparison of Solar PV and Diesel Water Pumping SystemRiad TifaÎncă nu există evaluări
- 3 Maison PDFDocument6 pagini3 Maison PDFRiad TifaÎncă nu există evaluări
- WSN 672 2017 126 148 2Document24 paginiWSN 672 2017 126 148 2Amit DostÎncă nu există evaluări
- Conference OranDocument2 paginiConference OranRiad TifaÎncă nu există evaluări
- Solar PV Array Fed Water Pumping Using BLDC Motor Drive With Boost-Buck ConverterDocument8 paginiSolar PV Array Fed Water Pumping Using BLDC Motor Drive With Boost-Buck ConverterRiad TifaÎncă nu există evaluări
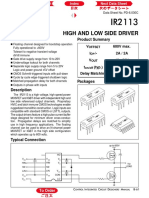
- High and Low Side Driver: Features Product SummaryDocument14 paginiHigh and Low Side Driver: Features Product SummaryMiguel GalvánÎncă nu există evaluări
- Solar PV-Battery Based Hybrid Water Pumping System Using BLDC Motor DriveDocument6 paginiSolar PV-Battery Based Hybrid Water Pumping System Using BLDC Motor DriveRiad TifaÎncă nu există evaluări
- 07038525Document6 pagini07038525Riad TifaÎncă nu există evaluări
- 07041977Document6 pagini07041977Riad TifaÎncă nu există evaluări
- Supplementary Load Frequency Control by Use of A Number of Both Electric Vehicles and Heat Pump Water HeatersDocument10 paginiSupplementary Load Frequency Control by Use of A Number of Both Electric Vehicles and Heat Pump Water HeatersRiad TifaÎncă nu există evaluări
- 07418710Document4 pagini07418710Riad TifaÎncă nu există evaluări
- Optoacoplador Integrado 4N25Document7 paginiOptoacoplador Integrado 4N25aureliocsÎncă nu există evaluări
- IRFP460Document9 paginiIRFP460yusufwpÎncă nu există evaluări
- High and Low Side Driver: Features Product SummaryDocument14 paginiHigh and Low Side Driver: Features Product SummaryMiguel GalvánÎncă nu există evaluări
- PDFDocument4 paginiPDFRiad TifaÎncă nu există evaluări
- Air Source Heat Pump A Key Role in The Development of Smart Buildings in Future Energy SystemsDocument6 paginiAir Source Heat Pump A Key Role in The Development of Smart Buildings in Future Energy SystemsRiad TifaÎncă nu există evaluări
- Design and Simulation of A Photovoltaic Induction Motor Coupled Water Pumping SystemDocument8 paginiDesign and Simulation of A Photovoltaic Induction Motor Coupled Water Pumping SystemRiad TifaÎncă nu există evaluări
- Design and Simulation of A Photovoltaic Induction Motor Coupled Water Pumping SystemDocument8 paginiDesign and Simulation of A Photovoltaic Induction Motor Coupled Water Pumping SystemRiad TifaÎncă nu există evaluări
- Modeling of A Number of Heat Pump Water Heaters As Control Equipment For Load Frequency Control in Power SystemsDocument7 paginiModeling of A Number of Heat Pump Water Heaters As Control Equipment For Load Frequency Control in Power SystemsRiad TifaÎncă nu există evaluări
- Supplementary Load Frequency Control by Use of A Number of Both Electric Vehicles and Heat Pump Water HeatersDocument10 paginiSupplementary Load Frequency Control by Use of A Number of Both Electric Vehicles and Heat Pump Water HeatersRiad TifaÎncă nu există evaluări
- Performance Analysis of A Directly Coupled Photovoltaic Water-Pumping SystemDocument6 paginiPerformance Analysis of A Directly Coupled Photovoltaic Water-Pumping SystemRiad TifaÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Sky ServerDocument30 paginiSky ServerMd RashidunnabiÎncă nu există evaluări
- Lecture 02 ADocument68 paginiLecture 02 AHữu Nam NguyễnÎncă nu există evaluări
- Engineering Mechanics PPT 1Document48 paginiEngineering Mechanics PPT 1muralikrishna1917100% (3)
- Fema BoschDocument52 paginiFema Boschxxsh100% (1)
- Chapter 1 IntroductionDocument9 paginiChapter 1 IntroductionDinksrawÎncă nu există evaluări
- Practicals OS GTU For PracticeDocument34 paginiPracticals OS GTU For PracticeAashish JanardhananÎncă nu există evaluări
- X AeroDocument497 paginiX Aeroborchec100% (1)
- Machine Model REGC - BDocument2 paginiMachine Model REGC - BManuelÎncă nu există evaluări
- Classification Algorithms IIDocument9 paginiClassification Algorithms IIJayod RajapakshaÎncă nu există evaluări
- VHDL CodesDocument9 paginiVHDL CodesSaneesh KarayilÎncă nu există evaluări
- Shiglay SM ch17Document33 paginiShiglay SM ch17Muhammad WaqasÎncă nu există evaluări
- Binomial DistributionDocument15 paginiBinomial DistributionNelsonMoseMÎncă nu există evaluări
- M2/R2 Blindcubing Methods: Home Cube Corner BlindsolvingDocument7 paginiM2/R2 Blindcubing Methods: Home Cube Corner BlindsolvingKeith Ginoel GabineteÎncă nu există evaluări
- TOD501-M22 05 Hypothesis Testing Lecture SlidesDocument32 paginiTOD501-M22 05 Hypothesis Testing Lecture SlidesTulip PathakÎncă nu există evaluări
- Problem Set D: Attempt HistoryDocument10 paginiProblem Set D: Attempt HistoryHenryÎncă nu există evaluări
- Sample Solution Midterm 2Document9 paginiSample Solution Midterm 2Ferdinand MangaoangÎncă nu există evaluări
- Adding and Subtraction Fractions With Unlike DenominatorsDocument2 paginiAdding and Subtraction Fractions With Unlike Denominatorsapi-291376922Încă nu există evaluări
- Trust-In Machine Learning ModelsDocument11 paginiTrust-In Machine Learning Modelssmartin1970Încă nu există evaluări
- Exam Review - 2012Document3 paginiExam Review - 2012Clement HoangÎncă nu există evaluări
- Hysteresis Loop Tracer.: TitleDocument7 paginiHysteresis Loop Tracer.: TitleSubhrajit SamantaÎncă nu există evaluări
- M&SCE NotesPart IDocument65 paginiM&SCE NotesPart IHassane AmadouÎncă nu există evaluări
- LAb Manual For Deflection of Beam Experiment Three Handout PDFDocument6 paginiLAb Manual For Deflection of Beam Experiment Three Handout PDFmehwish arshadÎncă nu există evaluări
- CE11 CE MATH 113A Mathematics in Modern World Trigonometry and Analytic GeometryDocument2 paginiCE11 CE MATH 113A Mathematics in Modern World Trigonometry and Analytic GeometryJoshua John JulioÎncă nu există evaluări
- ECE457 Pattern Recognition Techniques and Algorithms: Answer All QuestionsDocument3 paginiECE457 Pattern Recognition Techniques and Algorithms: Answer All Questionskrishna135Încă nu există evaluări
- Colegio de San Gabriel Arcangel of Caloocan, Inc. Escuela San Gabriel de Arcangel FoundationDocument8 paginiColegio de San Gabriel Arcangel of Caloocan, Inc. Escuela San Gabriel de Arcangel FoundationJasmine BalbinÎncă nu există evaluări
- Analysis of Single-Phase SPWM Inverter: A Thesis Submitted in Partial Fulfillment of The Requirements For The Degree ofDocument46 paginiAnalysis of Single-Phase SPWM Inverter: A Thesis Submitted in Partial Fulfillment of The Requirements For The Degree ofCho Thandar LwinÎncă nu există evaluări
- BA 1040 Seminar 2 2014 - 2015Document10 paginiBA 1040 Seminar 2 2014 - 2015S.L.L.CÎncă nu există evaluări
- Project-Musical Math PDFDocument3 paginiProject-Musical Math PDFsunil makwanaÎncă nu există evaluări
- 3D Graphics With OpenGLDocument31 pagini3D Graphics With OpenGLMusariri TalentÎncă nu există evaluări
- The "Big Bang" Is Just Religion Disguised As ScienceDocument6 paginiThe "Big Bang" Is Just Religion Disguised As ScienceSean BarryÎncă nu există evaluări