S-ar putea să vă placă și
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.De la EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Încă nu există evaluări
- How To Implement Icsp™ Using Pic16F8X Flash Mcus: Author: Rodger Richey Microchip Technology IncDocument8 paginiHow To Implement Icsp™ Using Pic16F8X Flash Mcus: Author: Rodger Richey Microchip Technology Incadil100% (1)
- 16Fxxx With ICSPDocument3 pagini16Fxxx With ICSPAlonso Corado100% (2)
- Lab2 MotorControl 08Document18 paginiLab2 MotorControl 08ĐạiDương100% (1)
- Ladder Logic For PIC and AVRDocument6 paginiLadder Logic For PIC and AVRTomás Totaro100% (1)
- Easypic v7 Manual v104cDocument38 paginiEasypic v7 Manual v104cjuan0537100% (1)
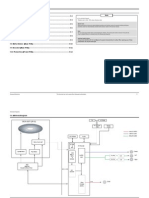
- Schematic Diagrams: Special NoteDocument12 paginiSchematic Diagrams: Special NoteAlexandre S. Corrêa100% (1)
- Understanding I2C BusDocument8 paginiUnderstanding I2C BusMai Khoa100% (1)
- Capacitor Meter AutoRanging OLED 128x32 KTW Updated Code 05feb2021Document2 paginiCapacitor Meter AutoRanging OLED 128x32 KTW Updated Code 05feb20214NM20EE085 VISHWAKEERTHI BHAT M100% (1)
- Interfacing LCD To Arduino Display Text and Characters On LCD Screen Using ArduinoDocument9 paginiInterfacing LCD To Arduino Display Text and Characters On LCD Screen Using ArduinoThomaselva100% (1)
- Frequently Asked Questions - AVRDocument18 paginiFrequently Asked Questions - AVRSagar Gupta100% (2)
- Brushless DC Electric Motor Control by CPLDDocument6 paginiBrushless DC Electric Motor Control by CPLDIonela100% (3)
- Lab LCDDocument6 paginiLab LCDJesus Cotrina100% (1)
- LED Moving Message Diaply Using PIC16f628 CD4017 and 74LS595Document5 paginiLED Moving Message Diaply Using PIC16f628 CD4017 and 74LS595murugaraj19822100% (1)
- Stepper Motor C CodeDocument4 paginiStepper Motor C CodeJoël Mwabi100% (1)
- Tshoot EthernetDocument11 paginiTshoot Ethernetmrigank shekhar100% (1)
- 41200cmanual MacrochipDocument36 pagini41200cmanual MacrochipDarilho Batista Ignacio100% (1)
- DIY Electronics (HK) LTD PO Box 88458, Sham Shui Po, Hong KongDocument17 paginiDIY Electronics (HK) LTD PO Box 88458, Sham Shui Po, Hong Kongrajudp100% (1)
- Agribot Project PresentationDocument21 paginiAgribot Project Presentationumaiya1990100% (1)
- CAN Bus ESD Protection Diode (PESD2CAN)Document13 paginiCAN Bus ESD Protection Diode (PESD2CAN)Amarnath M Damodaran100% (1)
- AVR Microcontroller: Prepared By: Eng. Ashraf DarwishDocument18 paginiAVR Microcontroller: Prepared By: Eng. Ashraf DarwishHectorLopez100% (1)
- Connecting LANs, Backbone Networks, and Virtual LANs - MCQsDocument8 paginiConnecting LANs, Backbone Networks, and Virtual LANs - MCQsSachin Wani100% (1)
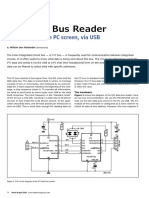
- Lector de Bus de Datos IÂ CDocument4 paginiLector de Bus de Datos IÂ CGiancarloRichardRivadeneyraMiranda100% (1)
- Using Internal EEPROM of PIC Microcontroller - MikroCDocument16 paginiUsing Internal EEPROM of PIC Microcontroller - MikroCdevchandar100% (1)
- Sel ProdDocument70 paginiSel Prodnad2702100% (1)
- LCD HandshakingDocument19 paginiLCD HandshakingNvskinId100% (1)
- Bit TwiddlingDocument90 paginiBit TwiddlingKritika Agrawal100% (1)
- MicrocontrollersDocument14 paginiMicrocontrollersanshu4u06100% (1)
- The Basics of Ethernet The Basics of Ethernet The Basics of Ethernet The Basics of EthernetDocument6 paginiThe Basics of Ethernet The Basics of Ethernet The Basics of Ethernet The Basics of EthernetRupesh Kumar100% (1)
- ElectronicsForYou201303 - RF RobotDocument3 paginiElectronicsForYou201303 - RF RobotAnonymous JoB5Zxg100% (1)
- LED ChaserDocument7 paginiLED ChaserMegan Skinner100% (1)
- Testing Pic Code For I2C Master - Slave CommunicationDocument15 paginiTesting Pic Code For I2C Master - Slave CommunicationJavier Corimaya33% (3)
- Universal Power-On Delay: by J. RuffellDocument1 paginăUniversal Power-On Delay: by J. RuffellTariq Zuhluf100% (2)
- UART Wishbone SpecDocument20 paginiUART Wishbone SpecSandeep Thakur100% (1)
- What Is The Difference Between Microcontrollers and 8051Document6 paginiWhat Is The Difference Between Microcontrollers and 8051Erandi Brito100% (1)
- 4 Pin LCDDocument13 pagini4 Pin LCDVenkata Konda Reddy Mulle100% (1)
- AN83 Maxim Fundamentals of RS-232 Serial CommunicationsDocument9 paginiAN83 Maxim Fundamentals of RS-232 Serial CommunicationsCarlos Roman Zarza100% (1)
- DMA Controller (DMAC) : - Data transfer between the μP's main memory & an externalDocument6 paginiDMA Controller (DMAC) : - Data transfer between the μP's main memory & an externalharinik7100% (1)
- Circuit DiagramDocument10 paginiCircuit DiagramM Rameez Ur Rehman100% (1)
- HBridgeMotorControl With PICDocument11 paginiHBridgeMotorControl With PICcoceicr100% (3)
- Contador Frecuencia 1-50Document4 paginiContador Frecuencia 1-50jose100% (2)
- AIS SchematicDocument6 paginiAIS SchematicKyai Sumirat Gludug Sinawang100% (4)
- Interfacing Example - 16 Character X 2 Line LCD: DescriptionDocument5 paginiInterfacing Example - 16 Character X 2 Line LCD: DescriptionManish Kumar sharma100% (1)
- Hobby Servo Motor Control Via PIC Pulse Width Modulation: Nathan Markey April 4, 2003Document7 paginiHobby Servo Motor Control Via PIC Pulse Width Modulation: Nathan Markey April 4, 2003Luciana Gutierrez Salazar100% (1)
- Basics of The Communication ProtocolDocument19 paginiBasics of The Communication ProtocolNEETHU PRAKASH100% (1)
- PIC+l293d DocumentDocument5 paginiPIC+l293d Documentmadduanil100% (1)
- DC Motor Control Using CDocument6 paginiDC Motor Control Using Cankitguptaims100% (2)
- Comparison of Communication ProtocolDocument2 paginiComparison of Communication Protocolvigneshwaran100% (2)
- AVR Microcontroller: Prepared By: Eng. Ashraf DarwishDocument28 paginiAVR Microcontroller: Prepared By: Eng. Ashraf DarwishHectorLopez100% (2)
- Edn 01 2012Document58 paginiEdn 01 2012尤仁宏100% (3)
- Sim8900-Evb V1.03 DL (160324)Document8 paginiSim8900-Evb V1.03 DL (160324)Bhagath Ch100% (1)
- Spi ModuleDocument13 paginiSpi ModuleMuhammadSaeedTahir100% (2)
- TOP269 An47 PDFDocument30 paginiTOP269 An47 PDFajoaomv100% (1)
- LCD 2 X 8Document4 paginiLCD 2 X 8dek_war100% (1)
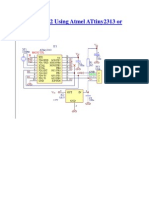
- USB-to-RS232 Using Atmel ATtiny2313 or ATmega8Document4 paginiUSB-to-RS232 Using Atmel ATtiny2313 or ATmega8mikcomi100% (1)
- 5 2 X 16 Parallel LCD: 3.5.1 Technical SpecificationsDocument3 pagini5 2 X 16 Parallel LCD: 3.5.1 Technical SpecificationsManish Singh100% (1)
- Program LCDDocument2 paginiProgram LCDAngga Wijaya Kusuma100% (1)
- Programacion IcspDocument8 paginiProgramacion IcspGerardo Madrigal100% (2)
- Section 28. In-Circuit Serial Programming™ (ICSP™) : HighlightsDocument14 paginiSection 28. In-Circuit Serial Programming™ (ICSP™) : HighlightsAnonymous XS9jAhY1pEÎncă nu există evaluări
- How To Implement Icsp™ Using Pic16F8X Flash Mcus: Author: Rodger Richey Microchip Technology IncDocument4 paginiHow To Implement Icsp™ Using Pic16F8X Flash Mcus: Author: Rodger Richey Microchip Technology IncEdgarÎncă nu există evaluări
- Black Box TechinquesDocument5 paginiBlack Box TechinquesMEHJABEEN SAYYEDÎncă nu există evaluări
- Ultrasonic Glasses For Blinds 3Document19 paginiUltrasonic Glasses For Blinds 3shradha anandÎncă nu există evaluări
- s120!30!003 Hino DX II ToolDocument23 paginis120!30!003 Hino DX II ToolPHÁT NGUYỄN THẾ100% (1)
- Onefs Cli Administration Guide 7 2Document928 paginiOnefs Cli Administration Guide 7 2eshu0123456789Încă nu există evaluări
- Must Read Installation Guide: Automotive Service Information Support TerminalDocument5 paginiMust Read Installation Guide: Automotive Service Information Support Terminalteratera3525Încă nu există evaluări
- 250-kW Grid-Connected PV Array - MATLAB & SimulinkDocument2 pagini250-kW Grid-Connected PV Array - MATLAB & SimulinkMuhammad Kamran MustafaÎncă nu există evaluări
- Direct PWM Drive Brushless Pre-Driver For Household Appliance MotorsDocument17 paginiDirect PWM Drive Brushless Pre-Driver For Household Appliance MotorsnguoidiquaÎncă nu există evaluări
- Operating Huawei v3Document133 paginiOperating Huawei v3Adrian BravoÎncă nu există evaluări
- FreeBSD Cheat SheetDocument2 paginiFreeBSD Cheat Sheetcemerlang satuÎncă nu există evaluări
- Lvlog2019 08 28 23 04 39Document4 paginiLvlog2019 08 28 23 04 39Brain Magdaleno DazaÎncă nu există evaluări
- Configure Eap Tls Flow With IseDocument24 paginiConfigure Eap Tls Flow With IseKash BarlasÎncă nu există evaluări
- Global Flexible Power SolutionsDocument8 paginiGlobal Flexible Power SolutionsTBS Máy Phát ĐiệnÎncă nu există evaluări
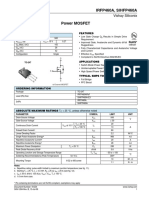
- Vishay IRFP460APBF Datasheet PDFDocument8 paginiVishay IRFP460APBF Datasheet PDFkamel keddarÎncă nu există evaluări
- AUTOSAR RS SystemTemplateDocument25 paginiAUTOSAR RS SystemTemplateAkinwumi Mayowa OtunbqÎncă nu există evaluări
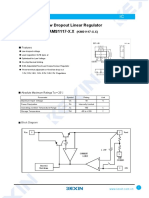
- SMD Type IC: Low Dropout Linear Regulator AMS1117-X.XDocument3 paginiSMD Type IC: Low Dropout Linear Regulator AMS1117-X.XcarlosmarciosfreitasÎncă nu există evaluări
- Occ CompleteDocument25 paginiOcc CompleteMayur Mestry100% (1)
- Brocade ZoningDocument34 paginiBrocade Zoningdenver_osbornÎncă nu există evaluări
- Task Offloading Optimization Mechanism Based On Deep Neural Network in Edge-Cloud EnvironmentDocument12 paginiTask Offloading Optimization Mechanism Based On Deep Neural Network in Edge-Cloud EnvironmentJihoon YangÎncă nu există evaluări
- 1.26 File Input-Output in JAVADocument10 pagini1.26 File Input-Output in JAVAAjinkyaÎncă nu există evaluări
- D4 DL405 PLCDocument92 paginiD4 DL405 PLCsmail bendrissouÎncă nu există evaluări
- CL205 Lab8Document21 paginiCL205 Lab8Jai KarmaniÎncă nu există evaluări
- Power Cloud For Technical Sales Part 2 - Private CloudDocument4 paginiPower Cloud For Technical Sales Part 2 - Private CloudAnon19023100% (3)
- Microprocessor: L.S.K. Wedagedara PGIS/SC/M.SC/CSC/10/48Document18 paginiMicroprocessor: L.S.K. Wedagedara PGIS/SC/M.SC/CSC/10/48lasanthahansiÎncă nu există evaluări
- BT14CSE038Document2 paginiBT14CSE038neetiÎncă nu există evaluări
- DSP and Multicore ProcessorsDocument12 paginiDSP and Multicore Processorsvvsulakhe6337Încă nu există evaluări
- Thesis SheetsDocument12 paginiThesis Sheetselsa n. calvezÎncă nu există evaluări
- Ogdcl Test 2018Document8 paginiOgdcl Test 2018MuhammadNaveed100% (1)
- Module1ImplementingServerVirtualizationwithHyper V PDFDocument43 paginiModule1ImplementingServerVirtualizationwithHyper V PDFMaria PiliÎncă nu există evaluări
- EchoLife EG8145V5 Datasheet 04Document3 paginiEchoLife EG8145V5 Datasheet 04javier berengueÎncă nu există evaluări
- School Management System: Submitted By: Muhammad Kaleem Ullah Hamza UmarDocument32 paginiSchool Management System: Submitted By: Muhammad Kaleem Ullah Hamza UmarwalterÎncă nu există evaluări