S-ar putea să vă placă și
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Parta Roth Herwitz Stability CriterionDocument28 paginiParta Roth Herwitz Stability CriterionVeena Divya KrishnappaÎncă nu există evaluări
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- 8th Semester Major Projects Nominated For Innovative ProjectDocument1 pagină8th Semester Major Projects Nominated For Innovative ProjectVeena Divya KrishnappaÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
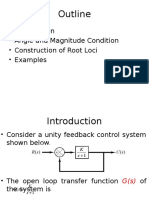
- Partb Root LocusDocument86 paginiPartb Root LocusVeena Divya KrishnappaÎncă nu există evaluări
- QB 2Document4 paginiQB 2Veena Divya KrishnappaÎncă nu există evaluări
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- ARM ProcessDocument2 paginiARM ProcessVeena Divya KrishnappaÎncă nu există evaluări
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- BlockDocument2 paginiBlockVeena Divya KrishnappaÎncă nu există evaluări
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- V Semester: (Autonomous Institution Affiliated To VTU)Document1 paginăV Semester: (Autonomous Institution Affiliated To VTU)Veena Divya KrishnappaÎncă nu există evaluări
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- "Microcontrollers": The Green House Based Modern Agriculture Industries Are TheDocument9 pagini"Microcontrollers": The Green House Based Modern Agriculture Industries Are TheVeena Divya KrishnappaÎncă nu există evaluări
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Lecture 41-42 Quadratic Optimal ControlDocument22 paginiLecture 41-42 Quadratic Optimal ControlVeena Divya KrishnappaÎncă nu există evaluări
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- 2 Discrete-Time Signals and Discrete-Time SystemsDocument29 pagini2 Discrete-Time Signals and Discrete-Time SystemsVeena Divya KrishnappaÎncă nu există evaluări
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Lab # Two: AnthropometryDocument27 paginiLab # Two: AnthropometryVeena Divya KrishnappaÎncă nu există evaluări
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Modern Control Systems (MCS) : Lecture-41-42 Design of Control Systems in Sate SpaceDocument21 paginiModern Control Systems (MCS) : Lecture-41-42 Design of Control Systems in Sate SpaceVeena Divya KrishnappaÎncă nu există evaluări
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Lesson Plan: R.V. College of Engineering, BangaloreDocument14 paginiLesson Plan: R.V. College of Engineering, BangaloreVeena Divya KrishnappaÎncă nu există evaluări
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- QuizDocument2 paginiQuizVeena Divya KrishnappaÎncă nu există evaluări
- Department of Instrumentation Technology Biomedical Instrumentation (V Semester) Quiz Question BankDocument2 paginiDepartment of Instrumentation Technology Biomedical Instrumentation (V Semester) Quiz Question BankVeena Divya KrishnappaÎncă nu există evaluări
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Department of Instrumentation Technology Biomedical Instrumentation (V Semester) Question BankDocument4 paginiDepartment of Instrumentation Technology Biomedical Instrumentation (V Semester) Question BankVeena Divya KrishnappaÎncă nu există evaluări
- ReDocument1 paginăReVeena Divya KrishnappaÎncă nu există evaluări
- Outer Layer Similarity and Energy Transfer in A Rough Wall Turbulent Channel Flow 3Document1 paginăOuter Layer Similarity and Energy Transfer in A Rough Wall Turbulent Channel Flow 3Massinissa RialÎncă nu există evaluări
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
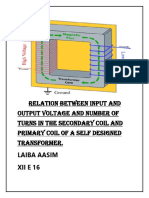
- Relation Between Input and Output Voltage and Number of Turns in The Secondary Coil and Primary Coil of A Self Designed TransformerDocument22 paginiRelation Between Input and Output Voltage and Number of Turns in The Secondary Coil and Primary Coil of A Self Designed TransformerBharati patil67% (18)
- Cruz - Bscpe - 1-1 - Task#4 The First Law of ThermodynamicsDocument2 paginiCruz - Bscpe - 1-1 - Task#4 The First Law of ThermodynamicsJoshua CruzÎncă nu există evaluări
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- Kas 201 T MCQ Sol Set BDocument10 paginiKas 201 T MCQ Sol Set BsudheshÎncă nu există evaluări
- Model Question-1 of Hydraulics For DAE-IIDocument6 paginiModel Question-1 of Hydraulics For DAE-IISougata DasÎncă nu există evaluări
- Program: Physical Sciences: EchanicsDocument5 paginiProgram: Physical Sciences: EchanicsMehdi SHÎncă nu există evaluări
- AEroelasticityDocument61 paginiAEroelasticityKashif AyazÎncă nu există evaluări
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Characterization of Polyurethane Foam Dielectric StrengthDocument8 paginiCharacterization of Polyurethane Foam Dielectric StrengthDr. Chandan SharmaÎncă nu există evaluări
- Land Vs Water StudentDocument4 paginiLand Vs Water Studentwackowacky 97Încă nu există evaluări
- M & GPM 4Document52 paginiM & GPM 4NALANDA CSC CENTREÎncă nu există evaluări
- List of Courses-SemV VIIDocument2 paginiList of Courses-SemV VIIAakash VermaÎncă nu există evaluări
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- XYZ Dairy EnggDocument7 paginiXYZ Dairy EnggBhuwesh PantÎncă nu există evaluări
- Yield Line Method AppliedDocument144 paginiYield Line Method AppliedUmed ADA-ALSATARÎncă nu există evaluări
- Stability Coefficients For Earth SlopesDocument25 paginiStability Coefficients For Earth SlopesDaniel Felipe Rodriguez RamirezÎncă nu există evaluări
- 2nd LawDocument3 pagini2nd LawTotok PrasetyoÎncă nu există evaluări
- 2365 202 Sample Questions ADocument8 pagini2365 202 Sample Questions AarchietomkinsÎncă nu există evaluări
- Chem 114 - Quiz 1Document1 paginăChem 114 - Quiz 1anon_915449609Încă nu există evaluări
- Lab Water Hydrolic JumpDocument4 paginiLab Water Hydrolic JumpAmirul AimanÎncă nu există evaluări
- AOSS321 L08 020309 Centrifugal Gravity Coriolis ForceDocument65 paginiAOSS321 L08 020309 Centrifugal Gravity Coriolis ForceErvin ArrasyidÎncă nu există evaluări
- Sample Problem - Stress On Thin-Walled Pressured VesselDocument5 paginiSample Problem - Stress On Thin-Walled Pressured Vesselmike.morz67% (6)
- 22.11.21 Champions SolutionsDocument21 pagini22.11.21 Champions SolutionsDamon StarkÎncă nu există evaluări
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- GCSE C2 Revision + Exam Questions (1) - Chemi-BondingDocument35 paginiGCSE C2 Revision + Exam Questions (1) - Chemi-BondingPrincess KimÎncă nu există evaluări
- Project Job Number Engineer: Connection Shear Forces For BeamsDocument1 paginăProject Job Number Engineer: Connection Shear Forces For Beamsjuan joseÎncă nu există evaluări
- Nyquist Plot PDFDocument24 paginiNyquist Plot PDFvidyagbargeÎncă nu există evaluări
- 3 Synchronous PDFDocument16 pagini3 Synchronous PDFASHOK P R kceÎncă nu există evaluări
- How To Calculate Eft by Mott-Schottky1Document4 paginiHow To Calculate Eft by Mott-Schottky1José Augusto LucenaÎncă nu există evaluări
- Physic Traducido PDFDocument123 paginiPhysic Traducido PDFBrashan CassidyÎncă nu există evaluări
- A Critical Review of Thermal Analysis of Concrete DamsDocument17 paginiA Critical Review of Thermal Analysis of Concrete DamsTony MeriÎncă nu există evaluări
- PIV Tracer-SeedingDocument12 paginiPIV Tracer-SeedingKaffelÎncă nu există evaluări
- Experimental Physics SuperpositionDocument17 paginiExperimental Physics SuperpositionGrace CywrainÎncă nu există evaluări