Documente Academic
Documente Profesional
Documente Cultură
Variador de Frecuencia
Încărcat de
Tomás Barrientos SaihuaDrepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Variador de Frecuencia
Încărcat de
Tomás Barrientos SaihuaDrepturi de autor:
Formate disponibile
Carrera Profesional de Electrotecnia Industrial.
INSTITUTO DE EDUCACION SUPERIOR
TECNOLOGICO PBLICO TUPAC AMARU
R.M. N 131-83-ED
CARRERA PROFESIONAL DE ELECTROTECNIA INDUSTRIAL
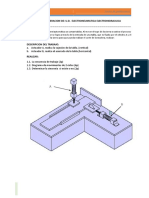
TEMA
Diseo y construccin de un mdulo para
control de un motor trifsico de 1HP,
mediante variador de frecuencia.
PARA OPTAR EL TTULO DE PROFESIONAL TCNICO EN
ELECTROTCNIA INDUSTRIAL
REALIZADO POR: Vctor Ral Romero Hacho
Rolando Quispe Lizaraso
ASESOR: LIC. Tomas Barrientos Saihua
JEFE DE AREA ACADEMICA: Lic. Cristbal Cahuina Uapillco
Cusco-Per
2016
Proyecto de titulacin.
Pgina 1
Carrera Profesional de Electrotecnia Industrial.
PRESENTACIN
Seor Director del Instituto de educacin Superior Tecnolgico Pblico TPAC
AMARU del Cusco ECON.LIZANDRO AMPUERO CASQUINO, Seor jefe del
rea
Acadmico
de
Electrotecnia
Industrial,
CRISTOBAL
CAHUINA
UAPILLCO, docentes del rea Acadmica y estudiantes; en cumplimiento del
reglamento de examen terico prctico, y con la finalidad de optar al ttulo de
profesional Tcnico en Electrotecnia Industrial, los estudiantes egresados de la
carrera presentan el tema de grado: DISEO
Y CONSTRUCCIN DE
UN MDULO PARA CONTROL DE UN MOTOR TRIFSICO DE
1HP, MEDIANTE VARIADOR DE FRECUENCIA
Con el propsito
de aportar a la investigacin, actualizacin, implementacin de nuestro
laboratorio de nuestra carrera de la institucin, nosotros los estudiantes con la
finalidad de explorar el mundo del control de motores mediante variadores,
ponemos nuestro trabajo para su respectiva evaluacin por su despacho.
Esperamos que el presente trabajo de proyecto llene expectativas de los
docentes y alumnos, pongo en agradecimiento anticipadamente su esmero,
esfuerzo y dedicacin para nosotros, como tambin esperamos que sirva de
inicio para que los futuros profesionales usen este pequeo aporte en su
formacin profesional.
Proyecto de titulacin.
Pgina 2
Carrera Profesional de Electrotecnia Industrial.
AGRADECIMIENTO
Agradecemos a Dios por darnos la vida y as llegar a culminar nuestros
estudios profesionales en electrotecnia industrial
Queremos expresarnos en primer lugar con un profundo agradecimiento a
nuestros padres, quienes en su condicin de padre principal, supo guiarnos y
brindarnos su apoyo; durante nuestra formacin profesional en bien de sus
hijos nos inculcaron hacer profesionales, lo cual plasmamos en el presente
trabajo.
Deseamos tambin extender nuestro agradecimiento a todos nuestros
docentes de la carrera profesional
de Electrotecnia Industrial. Y a nuestro
asesor quien supo guiarnos con sus conocimientos para que el presente
trabajo sea una realidad, pero sobre todo queremos agradecer por su
constante aliento, estmulo y apoyo desinteresadamente prestado durante este
presente proyecto.
Con mucho anhelo agradecemos a la institucin superior tecnolgico pblico
TUPAC AMARU cusco, por darnos ese acogimiento y brindarnos la educacin
cotidiana durante los tres aos que estuvimos en esta institucin pblica.
Proyecto de titulacin.
Pgina 3
Carrera Profesional de Electrotecnia Industrial.
INTRODUCCIN
El presente trabajo nos da a conocer de qu manera lo vamos a desarrollar el
presente proyecto en base a diferentes criterios de anlisis que permitan
evaluarlo.
Ya que la ciencia y la tecnologa estn al avance cada da, es por eso que nos
dedicamos a realizar y dar la aplicacin de
un mdulo para control de
un motor trifsico de 1HP, mediante variador de frecuencia,
con el fin de ampliar nuestros conocimientos en el control de un motor
mediante variador de frecuencias.
Para desarrollar el diseo del proyecto contamos con las herramientas
matemticas, elctricas y econmicas. En el campo de la Electrotecnia
Industrial ya que es una parte fundamental para el desarrollo tecnolgico de la
institucin y tanto para el alumnado.
Finalmente, el presente proyecto coadyuvar al desarrollo acadmico prcticoexperimental de los estudiantes de las carreras profesionales de Electrotecnia
Industrial y Electrnica Industrial, pues contarn con un mdulo didctico para
desarrollar distintas pruebas y poder analizar las caractersticas operativas, de
funcionamiento y control de un motor.
Proyecto de titulacin.
Pgina 4
Carrera Profesional de Electrotecnia Industrial.
DEDICATORIAS
Dedico este trabajo de
proyecto a mi madre y a
mis hermanos, por ser
partcipes cotidianos en m
logro profesional
Vctor Ral Romero Hacho
Dedico este proyecto a
mis padres Y familiares,
que siempre han estado
apoyndome, dndome la
fortaleza para el bien; a
nuestro apreciados
docentes, a mis
compaeros y amigos.
Rolando Quispe Lizaraso
Proyecto de titulacin.
Pgina 5
Carrera Profesional de Electrotecnia Industrial.
INDICE
PRESENTACIN.....2
AGRADECIMIENTO.....3
INTRODUCCI.........4
DEDICATORIAS.................................................................................................5
INDICE.....................................6
RESUMEN DEL PROYECTO.......11
CAPITULO I
1. ANTECEDENTES DE LA PROBLEMTICA.12
1.1. ASPECTOS INSTITUCIONALES12
1.2.
DESCRIPCION DEL PROBLEMA..13
1.3.
FORMULACION DEL PROBLEMA....15
1.4.
JUSTIFICACION15
1.5.
OBJETIVOS16
1.5.1. OBJETIVOS GENERAL..16
1.5.2. OBJETIVOS ESPECIFICOS16
1.6.
HIPTESIS....17
1.7.
VARIABLES DEL TEMA DE INVESTIGACION..17
1.7.1. VARIABLE INDEPENDIENTE:.17
1.7.2. VARIABLE DEPENDIENTE:..17
1.8.
ALCANCE..18
1.9.
UNIVERSO.18
1.10. MUESTRA..18
1.11. CRONOGRAMA DE ACTIVIDADES.19
Proyecto de titulacin.
Pgina 6
Carrera Profesional de Electrotecnia Industrial.
CAPITULO II
2.0. MARCO TERICO.15
2.1. INTERRUPTOR TERMOMAGNETICO....15
2.1.2. FUNCIONAMIENTO DEL TERMO MAGNTICO..15
2.1.3. PARTES DE UN INETERRUPTOR TERMOMAGNETICO...16
2.1.4. CARACTERSTICAS DEL INTERRUPTOR TERMO MAGNTICO...17
2.1.5. VENTAJAS DE TERMO MAGNTICOS.18
2.2.0. EL CONTACTOR....18
2.2.1 FUNCIONAMIENTO Y PARTES DEL CONTACTOR.....19
2.2.2. VENTAJAS DEL USO DEL CONTACTOR.21
2.2.3. ELECCIN DEL CONTACTOR.22
2.2.4. APLICACIN DE LOS CONTACTORES...23
2.3.0. RELE TERMICO...23
2.3.1 PRINCIPIOS DE FUNCIONAMIENTO DE UN RELE..24
2.3.2 FUNCIONAMIENTO DE UN RELE TERMICO.25
2.4.0 MOTOR ELCTRICO. .25
2.4.1. PARTES FUNDAMENTALES DE UN MOTOR ELCTRICO......26
2.4.2. MOTOR ASINCRNICO DE ROTOR BOBINADO....28
2.4.3. MOTORES ASINCRNICOS, JAULA DE ARDILLA....28
2.4.4. CLASIFICACIN DE LOS MOTORES DE CORRIENTE ALTERNA.30
2.4.5. POR EL TIPO DE ROTOR.....31
2.4.6. POR SU NMERO DE FASES DE ALIMENTACIN...32
2.4.7. CARACTERSTICA DE FUNCIONAMIENTO DEL MOTOR DE
INDUCCIN.....33
2.4.8. ARRANQUE DE UN MOTOR TRIFSICO DE INDUCCIN......34
2.4.9. FUNDAMENTOS BSICOS SOBRE EL CONTROL DE
Proyecto de titulacin.
Pgina 7
Carrera Profesional de Electrotecnia Industrial.
VELOCIDAD DE UN MOTOR TRIFSICO DE INDUCCIN...35
2.4.10. FORMAS DE CONTROL DE VELOCIDAD DE UN MOTOR
TRIFSICO DE INDUCCIN...35
2.4.11. CONTROL DE VELOCIDAD MEDIANTE EL CAMBIO EN LA
FRECUENCIA DE ALIMENTACIN....35
CAPITULO III
3.0. VARIADOR DE VELOCIDAD...36
3.1 CONTROLADOR DE VELOCIDAD..36
3.1.2. MOTIVOS PARA EMPLEAR VARIADORES DE VELOCIDAD...38
3.1.3. FOMENTAR EL AHORRO DE ENERGA MEDIANTE EL USO DE
VARIADORES DE VELOCIDAD..39
3.1.4. TIPOS DE VARIADORES DE VELOCIDAD......39
3.1.5. VARIADORES MECNICOS...40
3.1.6. VARIADORES HIDRULICOS....40
3.2.0. VARIADORES ELCTRICO-ELECTRNICOS45
3.2.1. TIPOS DE VARIADORES ELCTRICO-ELECTRNICOS....45
3.2.2. VARIADORES PARA MOTORES DE CC...46
3.2.3. VARIADORES POR CORRIENTES DE EDDY..47
3.2.4. VARIADORES DE DESLIZAMIENTO....47
3.2.5. VARIADORES PARA MOTORES DE CA..48
3.3.0. VARIADOR DE FRECUENCIA.49
3.3.1. PARTES DEL VARIADOR DE FRECUENCIA..51
3.3.2. TIPOS DE VARIADORES DE FRECUENCIA....53
3.3.3. VARIADOR TIPO MODULACIN DEL ANCHO DEL PULSO (PWM)..53
3.3.4. VARIADORES TIPO FLUJO VECTORIAL.....55
Proyecto de titulacin.
Pgina 8
Carrera Profesional de Electrotecnia Industrial.
3.3.5 VARIADORES DE FRECUENCIA QUE NO PRODUCEN ARMNICA..57
3.3.6. APLICACIONES INDUSTRIALES DE LOS VARIADORES DE
FRECUENCIA...58
3.3.7. ELEMENTOS DE PROTECCIN Y MONITOREO.............................60
3.3.8. ESTRUCTURA Y COMPONENTES DE LOS VARIADORES
ELECTRNICOS....60
3.3.9. TIPOS DE CARGAS...62
3.4.0. AHORRO DE ENERGA CON VARIADORES DE FRECUENCIA.65
3.4.1 AHORRO DE ENERGA EN CARGAS DE PAR VARIABLE..65
3.4.2. AHORRO DE ENERGA CON CARGAS DE PAR CONSTANTE...67
CAPITUTLO VI
4.1.0. VARIADOR LS INDUSTRIAL.69
4.1.1. VARIADOR DE FRECUENCIA IG5A, 220VAC, 1HP, 5A.....69
4.1.2. CARACTERSTICAS DEL VARIADOR IG5A, 220VAC, 1HP, 570
4.1.3. DATOS TCNICOS.........70
4.1.4. DISEO Y CONSTRUCCIN DEL MDULO DE VARIADOR DE
VELOCIDAD.73
4.2.0. ANEXO. .74
4.2.1. CARACTERSTICAS TCNICAS DE MANUAL DEL VARIADOR DE
FRECUENCIAS.......74
4.2.2. PREPARACIN DE INSTRUMENTOS Y PIEZAS PARA LA
OPERACIN.....75
4.2.3. CONEXIONADO DE LOS BORNES (ENTRADA/ SALIDA).78
4.2.4. SELECCIN DE PNP/NPN Y CONECTOR PARA LA OPCION DE
COMUNICACIN79
Proyecto de titulacin.
Pgina 9
Carrera Profesional de Electrotecnia Industrial.
4.2.5. TECLADO DE PROGRAMACION Y OPERACIN BASICA
CARACTERISTICAS..82
4.2.6. VISUALIZACION ALFANUMERICA EN EL TECLADO DE LED...83
4.2.7. DESPLAZAMIENTO A OTROS GRUPOS.....84
4.3.0. COMO CAMBIAR CDIGOS EN UN GRUPO..87
4.3.1. CAMBIO DE CDIGO EN EL GRUPO DE ACCIONAMIENTO.....87
4.3.2. NAVEGACIN POR LOS CDIGOS DENTRO DE UN GRUPO.88
4.4.0. DEFINICION DE LOS PARAMETROS.......89
4.4.1. CAMBIO DE LOS VALORES DE PARMETROS EN EL GRUPO DE
ACCIONAMIENTO...89
4.5.0. MONITOREO DEL ESTADO DE OPERACIN.92
4.5.1. VISUALIZACIN DE LA CORRIENTE DE SALIDA.....92
4.5.2. DEFINICIN DE LA FRECUENCIA Y OPERACIN BSICA...95
4.5.3. DEFINICION DE LA FRECUENCIA CON EL POTENCIOMETRO.96
4.6.0. DEFINICION DE LA FRECUENCIA CON EL POTENCIOMETRO Y LA
TECLA RUN..97
4.6.1. DIAGRAMA DE BLOQUES DE CONTROL98
4.6.2. FUNCIONES BSICAS....102
4.7.1. CONCLUSIONES...105
4.7.2. RECOMENDACIONES..106
4.8.0. BIBLIOGRAFA.110
Proyecto de titulacin.
Pgina 10
Carrera Profesional de Electrotecnia Industrial.
RESUMEN DEL PROYECTO
El presente proyecto Diseo y construccin de un mdulo para control de
un
motor trifsico de 1HP, mediante variador de frecuencia. est
destinado para ser utilizado en las unidades didcticas del mdulo profesional
III, Automatizacin de Sistema Elctricos Industriales, en la Carrera Profesional
de Electrotecnia Industrial del Instituto de educacin Superior Tecnolgico
Pblico Tpac Amaru
El proyecto tiene como propsito variar la velocidad de un motor 1HP mediante
variacin de frecuencias
suministra una tensin alterna cuyo valor es
regulable, al mismo tiempo que tambin es posible regular la frecuencia de
alimentacin al motor y invertir sentido de giro, de este modo es posible
conseguir un control de velocidad muy efectiva, que permite incluso llevar un
motor a una velocidad de sincronismo superior a la nominal. La razn de variar
a la vez frecuencia y tensin radica en el hecho de conseguir un par constante
en todo rgimen de la velocidad del motor.
Proyecto de titulacin.
Pgina 11
Carrera Profesional de Electrotecnia Industrial.
CAPITULO I
2. ANTECEDENTES DE LA PROBLEMTICA
1.12. ASPECTOS INSTITUCIONALES
Razn social
: IEST Pblico Tpac Amaru
Dispositivos de automatizacin: R.M-131-83-ED
Dispositivo de Revalidacin
: R.D.N 067-2005-ED
Director
: Econ. Lizandro R. Ampuero Casquino
Direccin
: Avenida Cusco N 496
Distrito
: San Sebastin
Provincia
: Cusco
Depto.
: Cusco
Telfonos
: 084-270759,084-273866
Fax
: 084-270315
: tamaru@hotmail.com
Pgina WEB
: WWW.ISTTA.NET
EL
R.M N 0418-75-ED
IEST
es creado con
originalmente como
Escuela Superior de Educacin Profesional ESEP al amparo de la Ley
General
de Educacin
N 19326, la Escuela Superior de Educacin
Profesional Tpac Amaru inicia sus actividades acadmicas el 21 de
abril de 1975, con las especialidades
de: Agropecuaria, Contabilidad,
Electricidad, Mecnica de Produccin, Minera y Salud Oral. En el ao de
1987 se autoriza el funcionamiento de la ESEP II, el acceso es con
Proyecto de titulacin.
Pgina 12
Carrera Profesional de Electrotecnia Industrial.
educacin secundaria Completa y previo examen de concurso pblico.
Desde el ao 1983, con la Ley General de Educacin N 23384 funciona
como Instituto
Superior tecnolgico
Tpac Amaru con las Carreras
Profesionales de: Contabilidad, Electricidad, Electrnica,
Mecnica
Automotriz, Mecnica de Produccin, Tcnicas en Laboratorio Clnico,
Gua Oficial de Turismo y
Administracin de Servicio
Creados por R.M. N 131-83-ED, luego se crearon
en Hostelera,
las carreras de
Computacin e Informtica y Enfermera Tcnica.
El IEST pblico Tpac Amaru del Cusco tuvo convenios con las
Repblicas de Hungra, Holanda, Alemania, Japn y ahora con Corea,
productos de estos convenios
se ha
implementado con mquinas,
instrumentos, herramientas y equipos instructivos para cada una de las
dos carreras, adems hubo la implementacin tcnico pedaggico al
personal docente. En los ltimos aos se ha recibido ayuda del Proyecto
CIPCYT, AECI, Unin
Europea, el BID
del Programa
de Formacin
Profesional Tecnolgica y Pedaggico en el Per (FORTE-PE), habiendo
iniciado
con el modelo de Sistema
Modular con las Carreras
Profesionales de: Administracin de Servicios en Hotelera, gua Oficial
de
Turismo,
Electrotecnia
Industrial,
Mecnica
de
Produccin
Enfermera. En la actualidad del IEST Pblico Tpac Amaru aplica la
formacin profesional basado en el enfoque por competencias en sus
diez carreras profesionales.
1.2.
DESCRIPCION DEL PROBLEMA.
La funcin primordial del variador de frecuencia es evitar la presencia de altos
niveles de energa elctrica y de carga reactiva en las redes elctricas que
impiden que se trasmita toda la potencia activa para la cual esta dimensionada,
lo que es motivo de preocupacin permanente tanto para las empresas que
distribuyen la energa y las industrias en general debido a que se logra un
ahorro considerable de dicha energa.
Proyecto de titulacin.
Pgina 13
Carrera Profesional de Electrotecnia Industrial.
Dentro de una industria, al no contar con un variador de frecuencia, produce los
siguientes inconvenientes.
Aumento de la intensidad de la corriente.
Prdidas en los conductores y fuertes cadas de tensin
Incrementos de potencia de las plantas, transformadores, reduccin de su vida
til y reduccin de la capacidad de conduccin de los conductores.
La temperatura de los conductores aumenta y esto reduce la vida de su
aislamiento
Aumento en sus factores por tener un bajo factor de potencia.
Durante los periodos en los que la demanda de energa es mayor, es
cuando toda la capacidad de la red elctrica se utiliza, en el caso de una
industria a mayor productividad, lo que lleva asociado necesariamente a una
mayor demanda de energa reactiva.
La seleccin y aplicacin de los variadores de frecuencia en el control de
velocidad de motores elctricos, implica el conocimiento de algunos conceptos
bsicos, para de esa manera poder usar toda la tecnologa existente en el
mercado y de esta poder atacar dicho problema que va en aumento este
trabajo su principal funcin es dar a conocer los mtodos ms comunes.
Como punto de vista muy particular se pretende atacar las necesidades que las
reas de automatizacin y control requieren en la actualidad, as como los
retos que podran surgir en un futuro dentro de la industria en general.
EL Instituto de Educacin Superior Tecnolgico Pblico Tpac Amaru
del Cusco-Carrera profesional de Electrotecnia Industrial aun todava
est en falencia con respecto al equipamiento de equipos de
automatizacin, para brindar una formacin profesional actualizada en
beneficio de los estudiantes de la carrera, reflejando a lo siguiente:
En la carrera profesional No se cuenta con tablero DISEO Y
CCONSTRUCCION DE UN MODULO PARA CONTROL DE UN
MOTOR
TRIFSICO
DE
HP,
MEDIANTE
VARIADOR
DE
FRECUENCIA.
Proyecto de titulacin.
Pgina 14
Carrera Profesional de Electrotecnia Industrial.
Habiendo detectado esta situacin problemtica en nuestra Institucin
especficamente en la Carrera Profesional de Electrotecnia Industrial;
presentamos el presente proyecto de Investigacin Tecnolgica
que
beneficiar a los estudiantes y pblico en general que se relacionen a
nuestra institucin.
1.3.
FORMULACION DEL PROBLEMA.
Por qu no se cuenta con tableros de control automtico de motores
trifsicos con variador de velocidad, actualizados en la carrera
profesional de Electrotecnia Industrial?
1.4.
JUSTIFICACION.
El estudio de aquellas industrias que son indispensables para satisfacer
las necesidades primordiales de una sociedad es de suma importancia
ya que de ellas depende en gran parte el desarrollo econmico de
nuestro pas, a estas se les da el nombre de industrias bsicas.
Entre las industrias bsicas existen necesidades relevantes para su
desarrollo, una de ellas es el de variar la velocidad, en los motores de
corriente alterna, ya que ocasionan un ahorro de energa, para esto es
necesario tener conocimiento sobre los criterios tcnicos, as como de
los procedimientos ms comnmente empleados.
Tambin es vital el tener conocimiento de los procedimientos adecuados
de operacin, control y proteccin de los motores elctricos los cuales
satisfacen las demandas en sus diferentes modalidades dentro de la
industria en general, de esta manera un solo operador puede controlar
fcilmente todo un conjunto de ellos.
El desarrollo de este tema es de gran importancia ya que se busca la
operacin eficiente del sistema elctrico desde el ms pequeo hasta el
ms grande, dentro de una instalacin industrial automatizada.
Proyecto de titulacin.
Pgina 15
Carrera Profesional de Electrotecnia Industrial.
El propsito de este trabajo es generar la informacin bsica necesaria
que permita auxiliar a los estudiantes, profesionales tecnicos que se
desempeen dentro de las actividades relacionadas con el diseo,
construccin, operacin y mantenimiento de plantas industriales y
construccin en general, ya que deben de tener un amplio conocimiento
acerca de los variadores de velocidad, para el mejor desempeo de su
actividad.
1.5.
OBJETIVOS.
1.5.1. OBJETIVOS GENERAL.
Implementar el mdulo de DISEO Y CONSTRUCCIN DE UN
MDULO PARA CONTROL DE UN MOTOR TRIFSICO DE 1HP,
MEDIANTE
VARIADOR
DE
FRECUENCIAS
(VARIACIN
DE
FRECUENCIA PROGRAMABLE), Para la carrera profesional de
Electrotecnia Industrial y sustentar el examen terico-prctico, para fines
de titulacin.
1.5.2. OBJETIVOS ESPECIFICOS.
Investigar las principales aplicaciones de los variadores de frecuencia
o velocidad en la industria.
Realizar los distintos tipos de arranque del motor de induccin y
determinar las ventajas del arranque con variador respecto a los
dems mtodos.
Indicar de una manera prctica y sencilla el control de velocidad de
los motores asncronos.
Realizar pruebas y verificar el buen funcionamiento del mdulo
didctico.
Explicar los conceptos de fuerza, par, velocidad angular, aceleracin
e inercia.
Disear y construir un mdulo para control de un motor trifsico de
1hp, mediante variador de frecuencia con todos los elementos que lo
componen.
Proyecto de titulacin.
Pgina 16
Carrera Profesional de Electrotecnia Industrial.
1.6.
HIPTESIS.
Si se disea en forma eficiente y luego se construye correctamente el
modulo: DISEO Y CONSTRUCCIN DE UN MDULO PARA
CONTROL DE UN MOTOR TRIFSICO DE 1HP, MEDIANTE
VARIADOR DE FRECUENCIAS (VARIACIN DE FRECUENCIA
PROGRAMABLE), para el laboratorio de la Carrera Profesional
Electrotecnia Industrial; entonces, se lograrn realizar
de
la formacin
integral (terico-prctico) aplicados al automatismo industrial, para
alcanzar las competencias y capacidades profesionales en los
estudiante de la Carrera profesional de Electrotecnia Industrial del
Instituto de Educacin Superior Tecnolgico TUPAC AMARU.
1.7.
VARIABLES DEL TEMA DE INVESTIGACION.
De acuerdo al tema de investigacin, se ha considerado los siguientes
variables:
1.7.1. VARIABLE INDEPENDIENTE:
DISEO Y CONSTRUCCIN DE UN MDULO PARA CONTROL DE
UN MOTOR TRIFSICO DE 1HP, MEDIANTE VARIADOR DE
FRECUENCIAS (VARIACIN DE FRECUENCIA PROGRAMABLE)
1.7.2. VARIABLE DEPENDIENTE:
Es el actual laboratorio de Electrotecnia Industrial con deficiencia tcnica
y que haciendo el diseo y construccin del mdulo educativo se podr
cambiar esa realidad deficiente.
1.7.3. VARIABLES INTERVENIENTES:
Estudiantes de Electrotecnia Industrial.
Docentes.
Jefe del rea Acadmica de Electrotecnia Industrial.
Personas que directa o indirectamente intervienen en el proyecto.
Proyecto de titulacin.
Pgina 17
Carrera Profesional de Electrotecnia Industrial.
1.8.
ALCANCE.
El alcance que tendr con la implementacin del presente modulo ser
la aplicacin prctica de la teora impartida en las Unidades Didcticas
de donde se desarrollan temas de automatizacin industrial.
Efectivamente este material nos va permitir realizar los siguientes:
Utilizar ntegramente el material en el desarrollo de las diferentes
Unidades Didcticas indicadas anteriormente y de todas unidades
didcticas que estn relacionadas con la automatizacin industrial.
Utilizar el equipo en exposiciones, seminarios y otros de esta forma
se
tendr
una
formacin
tangible
veraz;
respecto
la
automatizacin.
1.9.
UNIVERSO.
La poblacin o universo constituye el Instituto de Educacin Superior
Tecnolgico Publico Tpac Amaru-Cusco.
1.10. MUESTRA.
Est conformado por la carrera profesional de Electrotecnia Industrial
donde se va implementar el mdulo de: DISEO Y CONSTRUCCIN
DE UN MDULO PARA CONTROL DE UN MOTOR TRIFSICO DE
1HP, MEDIANTE VARIADOR DE FRECUENCIAS (VARIACIN DE
FRECUENCIA PROGRAMABLE)
Proyecto de titulacin.
Pgina 18
Carrera Profesional de Electrotecnia Industrial.
1.11. CRONOGRAMA DE ACTIVIDADES
PROGRAMACION
Recopilacin de datos
Procesamiento de informacin
Evaluacin y diseo del proyecto
Construccin de la estructura
Instalacin de motor y circuito
Armar de tablero
Instalacin
de
variador
NOVIEMBRE
OCTUBRE
SEPTIEMBRE
AGOSTO
JULIO
JUNIO
MAYO
AO 2016
ABRIL
N ACTIVIDADES
de
frecuencias
8
Prueba de todo el proceso
Conclusin del proyecto
Proyecto de titulacin.
Pgina 19
Carrera Profesional de Electrotecnia Industrial.
CAPITULO II
2.0. MARCO TERICO.
2.1. INTERRUPTOR TERMOMAGNETICO.
Definicin: es un dispositivo capaz de interrumpir la corriente elctrica de un
circuito cuando sta sobrepasa ciertos valores mximos. Su funcionamiento se
basa en dos de los efectos producidos por la circulacin de corriente en un
circuito: el magntico y el trmico (efecto Joule). El dispositivo consta, por
tanto, de dos partes, un electroimn y una lmina bimetlica, conectadas en
serie y por las que circula la corriente que va hacia la carga.
Al igual que los fusibles, los interruptores magneto trmicos protegen la
instalacin contra sobrecargas y cortocircuitos.
Graf. N1Termo magntico
2.1.2. FUNCIONAMIENTO DEL TERMO MAGNTICO
El funcionamiento de un interruptor termo magntico se basa en dos de los
efectos producidos por la circulacin de corriente elctrica en un circuito: el
magntico y el trmico (efecto Joule). El dispositivo consta, por tanto, de dos
partes, un electroimn y una lmina bimetlica, conectadas en serie y por las
que circula la corriente hacia la carga.
Proyecto de titulacin.
Pgina 20
Carrera Profesional de Electrotecnia Industrial.
Graf. N2 esquema de funcionamiento del termo magntico
2.1.3. PARTES DE UN INETERRUPTOR TERMOMAGNETICO
Est constituido por una lmina bimetlica que se curva por efecto del calor
producido por la circulacin de la corriente elctrica. Esta deformacin
temporaria de la lmina se produce debido a los diferentes grados de dilatacin
de los dos metales que la componen y es la que provoca la apertura del
interruptor. Por otro lado el disparador magntico est constituido por una
bobina (electroimn) que atrae el ncleo (pieza articulada) que est en su
interior. Cuando la corriente llega a un cierto valor la bobina atrae
completamente al ncleo el cual acciona el dispositivo mecnico produciendo la
apertura de los contactos principales del interruptor.
Graf. N3 partes de termo magnticos
Proyecto de titulacin.
Pgina 21
Carrera Profesional de Electrotecnia Industrial.
2.1.4. CARACTERSTICAS DEL INTERRUPTOR TERMO MAGNTICO
Las caractersticas que definen un interruptor termo magntico son el
amperaje, el nmero de polos, el poder de corte y el tipo de curva de disparo
(B, C, D, MA). (Por ejemplo, Interruptor termo magntico C-16A-IV 4,5kA, que
necesita unos 10x16A -entre 5 y 10 veces el amperaje indicado- para saltar en
menos de un segundo y proteger el circuito. Si fuese B-16A-IV 4,5kA
necesitara unos 5x16 A (entre tres y cinco veces el valor nominal indicado).
Una corriente mantenida de 16 A provocara el disparo al cabo de una hora.
Graf. N4 caractersticas de interruptores
2.1.5. VENTAJAS DE TERMO MAGNTICOS
Proyecto de titulacin.
Pgina 22
Carrera Profesional de Electrotecnia Industrial.
Apto especialmente para el montaje en tableros de distribucin de poca
profundidad en instalaciones domiciliarias o de edificios. Segura y rpida
conexin de los conductores de alimentacin por el desplazamiento de las
barras colectoras hacia la parte posterior. Bornes idnticos en ambos lados,
para la alimentacin alternativa por la parte superior o inferior indistintamente.
Montaje y desmontaje sin herramientas. Una rpida y cmoda separacin del
sistema de interconexin es posible. Identificacin ptica separada de la
posicin del interruptor y en el mercado tenemos diferentes marcas
reconocidas, recomendables como aparece en cuadro de imagen.
Graf.N5 marcas de termo magnticos
2.2.0.
EL CONTACTOR.
Definicin: El contactor es un aparato elctrico de mando a distancia, que
puede cerrar o abrir circuitos, ya sea en vaco o en carga. Es la pieza clave del
automatismo en el motor elctrico. Su principal aplicacin es la de efectuar
maniobras de apertura y cierra de circuitos relacionados con instalaciones de
motores. Excepto los pequeos motores individuales, que son accionados
manualmente o por rels, el resto de motores se accionan por.
Proyecto de titulacin.
Pgina 23
Carrera Profesional de Electrotecnia Industrial.
Graf. N6 contactor y simbologa de contactos
Contactores. Un contactor est formado por una bobina y unos contactos, que
pueden estar abiertos o cerrados, y que hacen de interruptores de apertura y
cierre de la corriente en el circuito. La bobina es un electroimn que acciona los
contactos, abriendo los cerrados y cerrando el contacto abierto. Cuando le deja
de llegar corriente a la bobina los contactos vuelven a su estado de reposo.
2.2.1. FUNCIONAMIENTO Y PARTES DEL CONTACTOR
Graf.N7 partes del contactor
Proyecto de titulacin.
Pgina 24
Carrera Profesional de Electrotecnia Industrial.
Si hacemos llegar corriente a la bobina, est que est formada por un
electroimn, atrae hacia s el martillo arrastrando en su movimiento a los
contactos mviles que tirar de ellos hacia la izquierda. Esta maniobra se llama
"enclavamiento del contactor". Todos los contactos que estaban abiertos ahora
sern contactos cerrados, y el ltimo que estaba cerrado ahora ser un
contacto abierto. Cuando la bobina est activada se dice que el contactor est
enclavado. En el momento que dejemos de dar corriente a la bobina el
contactor volver a su posicin de reposo por la accin del muelle resorte,
dejando los contactos como estaban al principio, al tirar de ellos hacia la
derecha. Vamos a conectar en un circuito el contactor para el arranque de un
motor trifsico:
Graf. N8 arranque del motor elctrico
Si te fijas la bobina se activa a travs de un interruptor por una fase y el neutro
(L1 y N), es decir a 220V. El motor trifsico se activa a travs de los contactos
principales del contactor con las 3 fases (L1,L2 y L3), por ejemplo
380V.Cuando activamos el Interruptor le llega corriente a la bobina y el
contactor se enclava cerrando los contactos principales y arrancando el motor.
Cuando desconectamos el interruptor deja de llegarle corriente a la bobina y
Proyecto de titulacin.
Pgina 25
Carrera Profesional de Electrotecnia Industrial.
los contactos vuelven a la posicin de reposo haciendo que el motor se pare.
Como ves en los circuitos de los contactores se distinguen dos circuitos
diferentes, el circuito de mando, que ser el que active o desactive la bobina y
el circuito de fuerza, que ser el que arranque o pare el motor.El circuito de
mando suele ser un circuito a menor tensin e intensidad que el circuito de
fuerza. De ah que los contactos principales o de fuerza sean ms gordos que
los auxiliares. En el esquema anterior no hemos usado los contactos auxiliares,
solo el de la bobina, pero ya vers cmo se utilizan para por ejemplo el auto
alimentacin. Una de las caractersticas bsicas de un contactor es su
posibilidad de maniobra en circuitos sometidos a corrientes muy fuertes, en el
circuito de fuerza, pero con pequeas corrientes en el circuito de mando. Por
ejemplo para activar la bobina 0,35A a 220V y para el de Fuerza 200A.
2.2.2. VENTAJAS DEL USO DEL CONTACTOR
Seguridad del personal dado que realiza las maniobras en lugares alejados del
operador. El motor y el contactor pueden estar lejos del operador, solo es
necesario que el operador este cerca del interruptor de arranque para accionar
el motor, y como vimos esta parte trabaja a tensiones menores que las de
fuerza (donde est el motor y/o el contactor. Imagina que tenemos el interruptor
de arranque separado del motor 1Km y el contactor est sobre el propio motor
o muy cerca de l. El circuito desde el interruptor hasta el motor es el circuito
auxiliar, a poca tensin, con poca intensidad y por lo tanto con cables muy finos
o de poca seccin. Los cables de ms seccin son los que van del contactor al
motor, y esto solo tendr la longitud desde el contactor al motor, es decir sern
muy cortos. Qu ventaja tiene esto? Pues que es un gran ahorro en el gasto
de los cables o conductores. Imagina que tuviramos que arrancar el motor
directamente sin contactor, desde el interruptor, que por cierto tendra que ser
mucho mayor y ms caro, hasta el motor, todos los cables seran de fuerza y
mediran 1Km de largos, con lo cual sera mucho mayor el coste en
conductores, ahorro de tiempo al realizar maniobras largas. Posibilidad de
controlar el arranque de un motor desde puntos diferentes automatizacin del
arranque de motores. Automatizacin y control de numerosas aplicaciones, con
ayuda de los aparatos auxiliares del contactor. Ejemplos: llenado automtico de
un pozo de agua, control de la temperatura en hornos, etc.
Proyecto de titulacin.
Pgina 26
Carrera Profesional de Electrotecnia Industrial.
2.2.3. ELECCIN DEL CONTACTOR.
A la hora de elegir un contactor de maniobra de motores hay que tener en
cuenta los siguientes factores:
Tensin y potencia nominales de la carga, o sea del motor.
Tensin y frecuencia reales de alimentacin de la bobina y de los
elementos del circuito auxiliar.
Clase de arranque del motor: directo, estrella-tringulo, etc.
Nmero aproximado de conexiones-hora.
Condiciones de trabajo normales, duros o extremas. Podran ser
calefaccin elctrica, ascensores, gras, mquinas de imprimir etc.
Arranque de Motores por Contactor, Vamos a ver algunos circuitos
bsicos de arranque de motores por contactor. En este caso usaremos
contactores trifsicos.
Graf. N9 esquema de circuito del mando y fuerza
2.2.4. APLICACIN DE LOS CONTACTORES.
Proyecto de titulacin.
Pgina 27
Carrera Profesional de Electrotecnia Industrial.
La aplicacin ms conocida del contactor es su utilizacin para el mando de
motores elctricos, pero existe muchas ms aplicaciones como:
Circuitos de calefaccin
Circuito de alumbrado
Transformadores
En la conexin de condensadores correctores del factor de potencia
Tambin existe contactores para media tensin
2.3.0. RELE TERMICO.
Los rels trmicos son los aparatos ms utilizados para proteger los motores
contra las sobrecargas dbiles y prolongadas. Se pueden utilizar en corriente
alterna o continua. Este dispositivo de proteccin garantiza.
Optimizacin la duracin de los motores, impidiendo que funcionen en
condiciones de calentamiento anmalas. La continuidad de explotacin de las
maquinas o las instalaciones evitando paradas imprevistas.
Volver a arrancar despus de un disparo con la mayor rapidez y las mejores
condiciones de seguridad posible para los equipos y las personas.
Graf. N10 rel trmico y simbologa
Proyecto de titulacin.
Pgina 28
Carrera Profesional de Electrotecnia Industrial.
Grafico n11 partes de rel trmico
Bsicamente un rel consta de dos partes; una bobina y unos contactos.
BOBINA: Es un arrollamiento de hilo, generalmente de cobre, que se acopla
sobre un ncleo de hierro magntico.
CONTACTOS: los contactos son unas lminas metlicas que se juntan o
separan segn apliquemos tensin a la bobina del rel.
2.3.1 PRINCIPIOS DE FUNCIONAMIENTO DE UN RELE TERMICO.
Los rels trmicos tripolares poseen tres bilminas compuestas cada una por
dos metales con coeficientes de dilatacin muy diferentes unidos mediante
lminas y rodeado de un bobinado de calentamiento. Cada bobinado de
calentamiento
est conectado en serie a una fase del motor. La corriente
absorbida por el motor calienta los bobinados, haciendo que las bilminas se
deforme en mayor o menor grado segn la intensidad de corriente. La
deformacin de
las bilminas provoca a su vez el momiviento giratorio de
una leva o de un rbol unido al dispositivo de disparo.
Proyecto de titulacin.
Pgina 29
Carrera Profesional de Electrotecnia Industrial.
2.3.2 FUNCIONAMIENTO DE UN RELE TERMICO.
Su misin consiste en desconectar el circuito cuando la intensidad consumida
por el motor, supera durante un tiempo corto, a la permitida por este, evitando
que bobinado se queme. Este ocurre gracias a que consta de tres laminas
bimetlicas con sus correspondientes bobinas calefactoras que cuando son
recorridas por una determinada intensidad, provocan el calentamiento
del
bimetal y la apertura del rel.
2.4.0 MOTOR ELCTRICO.
Un motor
elctrico es
una mquina
elctrica que
transforma energa
elctrica en energa mecnica por medio de interacciones electromagnticas.
Algunos de los motores elctricos son reversibles, pueden transformar energa
mecnica en energa elctrica funcionando como generadores. Los motores
elctricos de traccin usados en locomotoras realizan a menudo ambas tareas,
si se los equipa con frenos regenerativos.
Son ampliamente utilizados en instalaciones industriales, comerciales y
particulares. Pueden funcionar conectados a una red de suministro elctrico o
a bateras. As, en automviles se estn empezando a utilizar en vehculos
hbridos para aprovechar las ventajas de ambos.
Graf. N12 motor
Proyecto de titulacin.
Pgina 30
Carrera Profesional de Electrotecnia Industrial.
2.4.1. PARTES FUNDAMENTALES DE UN MOTOR ELCTRICO
Dentro de las caractersticas fundamentales de los motores elctricos, stos se
hallan formados por varios elementos, sin embargo, las partes principales son:
el estator, la carcasa, la base, el rotor, la caja de conexiones, las tapas y los
cojinetes. No obstante, un motor puede funcionar solo con el estator y el rotor.
Graf. N13 partes estructural del motor
1) Estator: El estator es el elemento que opera como base, permitiendo que
desde ese punto se lleve a cabo la rotacin del motor. El estator no se mueve
mecnicamente, pero si magnticamente. Existen dos tipos de estatores
a) Estator de polos salientes.
b) Estator ranurado.
Proyecto de titulacin.
Pgina 31
Carrera Profesional de Electrotecnia Industrial.
Graf. N14 tipo del estator.
El estator est constituido principalmente de un conjunto de lminas de acero al
silicio (y se les llama "paquete"), que tienen la habilidad de permitir que pase a
travs de ellas el flujo magntico con facilidad; la parte metlica del estator y
los devanados proveen los polos magnticos. Los polos de un motor siempre
son pares (pueden ser 2, 4, 6, 8, 10, etc.,), por ello el mnimo de polos que
puede tener un motor para funcionar es dos (un norte y un sur).
2) El rotor: es el elemento de transferencia mecnica, ya que de l depende la
conversin de energa elctrica a mecnica. Los rotores, son un conjunto de
lminas de acero al silicio que forman un paquete, y pueden ser bsicamente
de tres tipos:
a) Rotor ranurado
b) Rotor de polos salientes
c) Rotor jaula de ardilla
Graf. N15 tipos de rotor.
2.4.2. MOTOR ASINCRNICO DE ROTOR BOBINADO.
Proyecto de titulacin.
Pgina 32
Carrera Profesional de Electrotecnia Industrial.
Se utiliza en aquellos casos en los que la transmisin de potencia es
demasiado elevada (a partir de 200 KW) y es necesario reducir las corrientes
de arranque. Tambin se utiliza en aquellos casos en los que se desea regular
la velocidad del eje.
Su caracterstica principal es que en el rotor se aloja un conjunto de bobinas
que adems se pueden conectar al exterior a travs de anillos rasantes.
Colocando resistencias variables en serie a los bobinados del rotor se consigue
suavizar las corrientes de arranque. De la misma manera, gracias a un
conjunto de resistencias conectadas a los bobinados del rotor, se consigue
regular la velocidad del eje. Un detalle interesante es que la velocidad del eje
nunca podr ser superior que la velocidad correspondiente si el motor fuera
sncrono.
2.4.3. MOTORES ASINCRNICOS, JAULA DE ARDILLA.
Graf. N16 estator y rotor de motor asncrono
Es sin duda el ms comn de todos los motores elctricos, por su sencillez y
forma constructiva. Elimina el devanado en el rotor o inducido. Las planchas
magnticas forman el ncleo del rotor, una vez ensambladas dejan unos
espacios cilndricos que sustituyen a las ranuras de los rotores bobinados, por
Proyecto de titulacin.
Pgina 33
Carrera Profesional de Electrotecnia Industrial.
estas ranuras pasan unas barras de cobre (o aluminio) que sobresalen
ligeramente del ncleo, estas barras o conductores estn unidos en ambos
lados por unos anillos de cobre. Se denomina Jaula de Ardilla por la similitud
que tiene con una jaula.
Cuando este rotor est entre dos polos de campo electromagnticos que han
sido magnetizados por una corriente alterna, se induce una f.e.m. en las
espiras de la jaula de ardilla, una corriente muy grande las recorre y se produce
un fuerte campo que contrarresta al que ha producido la corriente (ley de Lenz).
Aunque el rotor pueda contrarrestar el campo de los polos estacionarios, no
hay razn para que se mueva en una direccin u otra y as permanece parado.
Es similar al motor sncrono el cual tampoco se arranca solo. Lo que se
necesita es un campo rotatorio en lugar de un campo alterno.
PAR MOTOR.
Cuando las lneas del campo magntico cortan las barras del rotor, se produce
en ellas una fuerza electromotriz que da lugar a corrientes que circulan en los
sentidos opuestos (en los hilos ms prximos a los polos) es decir, que se
producen esas corrientes en hilo separado 180.
Estos hilos se ven sometidos a unas fuerzas que tienden a moverlos en
direccin perpendicular al campo magntico y produciendo con ello el llamado
par motor.
En un motor elctrico, el par motor y la velocidad de giro n estn relacionadas
de tal forma que cuando la velocidad decrece el par aumenta.
PAR DE GIRO.
El valor del par de giro del motor viene dado por:
M=K.Q.Ir
K = constante
Q = Flujo magntico del campo giratorio
Ir = intensidad de corriente del rotor
2.4.4. CLASIFICACIN DE LOS MOTORES DE CORRIENTE ALTERNA.
Por su velocidad de giro:
Proyecto de titulacin.
Pgina 34
Carrera Profesional de Electrotecnia Industrial.
1. Asncrono: Son aquellos motores elctricos en los que el rotor nunca
llega a girar en la misma frecuencia con la que lo hace el campo
magntico del estator. Cuanto mayor es el par motor mayor es esta
diferencia de frecuencias.
2. Motores Sncronos: Son aquellos motores elctricos en los que el
rotor nunca llega a girar en la misma frecuencia con la que lo hace el
campo magntico del estator. Cuanto mayor es el par motor mayor es
esta diferencia de frecuencias. Este motor tiene la caracterstica de que
su velocidad de giro es directamente proporcional a la frecuencia de la
red de corriente alterna que lo alimenta. Es utilizado en aquellos casos
en donde se desea una velocidad constante.
Se utilizan para convertir potencia elctrica en potencia mecnica de rotacin.
La caracterstica principal de este tipo de motores es que trabajan a velocidad
constante que depende solo de la frecuencia de la red y de otros aspectos
constructivos de la mquina. A diferencia de los motores asincrnicos, la
puesta en marcha requiere de maniobras especiales a no ser que se cuente
con un sistema automtico de arranque. Otra particularidad del motor sncrono
es que al operar de forma sobreexcitado consume potencia reactiva y mejora el
factor de potencia.
Las mquinas sncronas funcionan tanto como generadores y como motores.
En nuestro medio sus aplicaciones son mnimas y casi siempre estn
relacionadas en la generacin de energa elctrica. Para el caso referente a la
mquina
rotativa
sncrona,
todas
las
centrales
Hidroelctricas
Termoelctricas funcionan mediante generadores sncronos trifsicos.
Para el caso del motor se usa principalmente cuando la potencia demandada
es muy elevada, mayor que 1MW (mega vatio).
Los motores sncronos se subdividen a su vez, de acuerdo al tipo del rotor que
utilizan, siendo estos: rotor de polos lisos (polos no salientes) y de polos
salientes.
Proyecto de titulacin.
Pgina 35
Carrera Profesional de Electrotecnia Industrial.
Graf. N17 motor con rotor de polos lisos
Motores con
rotor de polos lisos o polos no salientes: se utilizan en
rotores de dos y cuatro polos. Estos tipos de rotores estn construidos al
mismo nivel de la superficie del rotor. Los motores de rotor liso trabajan a
elevadas velocidades.
Motores de polos salientes: Los motores de polos salientes trabajan a bajas
velocidades. Un polo saliente es un polo magntico que se proyecta hacia fuera
de la superficie del rotor. Los rotores de polos salientes se utilizan en rotores de
cuatro o ms polos.
Graf.n18 Motores de polos salientes
2.4.5. POR EL TIPO DE ROTOR.
1. Motores de anillos rozantes:
Es similar al motor trifsico jaula de ardilla,
su estator contiene los bobinados que generan el campo magntico giratorio.
El objetivo del diseo del motor de anillos rasantes es eliminar la corriente
excesivamente alta del arranque y el troqu elevado asociado con el motor de
jaula de ardilla. Cuando el motor se arranca un voltaje es inducido en el rotor,
Proyecto de titulacin.
Pgina 36
Carrera Profesional de Electrotecnia Industrial.
con la resistencia agregada de la resistencia externa la corriente del rotor y por
lo tanto el troqu pueden controlarse fcilmente
2. Motores con colector: Los colectores tambin son llamados anillos
rotatorios, son comnmente hallados en mquinas elctricas de corriente alterna
como generadores, alternadores, turbinas de viento, en las cuales conecta la corriente
de campo o excitacin con el bobinado del rotor.
Pueden entregar alta potencia con dimensiones y peso reducidos.
Pueden soportar considerables sobrecargas temporales sin detenerse
completamente.
Se adaptan a las sobrecargas disminuyendo la velocidad de rotacin, sin
excesivo consumo elctrico.
Producen un elevado torque de funcionamiento.
3. Motores de jaula de ardilla: un motor elctrico con un rotor de jaula de
ardilla tambin se llama "motor de jaula de ardilla". En su forma instalada, es un
cilindro montado en un eje. Internamente contiene barras conductoras
longitudinales de aluminio o de cobre con surcos y conectados juntos en ambos
extremos poniendo en cortocircuito los anillos que forman la jaula. El nombre
se deriva de la semejanza entre esta jaula de anillos y barras y la rueda de un
hmster (ruedas probablemente similares existen para las ardillas domsticas).
2.4.6. POR SU NMERO DE FASES DE ALIMENTACIN.
Motores monofsicos; Fueron los primeros motores utilizados en la industria.
Cuando este tipo de motores est en operacin, desarrolla un campo
magntico rotatorio, pero antes de que inicie la rotacin, el estator produce un
campo estacionario pulsante.
Para producir un campo rotatorio y un par de arranque, se debe tener un
devanado auxiliar desfasado 90 con respecto al devanado principal. Una vez
que el motor ha arrancado, el devanado auxiliar se desconecta del circuito.
Proyecto de titulacin.
Pgina 37
Carrera Profesional de Electrotecnia Industrial.
Motores trifsicos; Los motores trifsicos usualmente son ms utilizados en la
industria, ya que en el sistema trifsico se genera un campo magntico
rotatorio en tres fases, adems de que el sentido de la rotacin del campo en
un motor trifsico puede cambiarse invirtiendo dos puntas cualesquiera del
estator, lo cual desplaza las fases, de manera que el campo magntico gira en
direccin opuesta.
Tipos y caractersticas; Los motores trifsicos se usan para accionar
mquinas-herramientas, bombas, elevadores, ventiladores, sopladores y
muchas otras mquinas.
Bsicamente estn construidos de tres partes esenciales: Estator, rotor y tapas.
El estator consiste de un marco o carcasa y un ncleo laminado de acero al
silicio, as como un devanado formado por bobinas individuales colocadas en
sus ranuras. Bsicamente son de dos tipos:
De jaula de ardilla.
De rotor devanado
El de jaula de ardilla es el ms usado y recibe este nombre debido a que
parece una jaula de ardilla de aluminio fundido. Ambos tipos de rotores
contienen un ncleo laminado en contacto sobre el eje. El motor tiene tapas en
ambos lados, sobre las cuales se encuentran montados los rodamientos o
baleros sobre los que rueda el rotor. Estas tapas se fijan a la carcasa en ambos
extremos por medio de tomillos de sujecin. Los rodamientos, baleros o
rodamientos pueden ser de rodillos o de deslizamiento.
2.4.7. CARACTERSTICA DE FUNCIONAMIENTO DEL MOTOR DE
INDUCCIN.
El funcionamiento de un motor, en general, se basa en las propiedades
electromagnticas de la corriente elctrica y la posibilidad de crear a partir de
ellas, un campo magntico giratorio que induce un movimiento de rotacin.
Suponiendo que un motor de induccin comercial de jaula de ardilla se haga
arrancar con el voltaje nominal en las terminales de lnea de su estator
(arranque a travs de la lnea) desarrollar un par de arranque de que har que
aumente su velocidad. Al aumentar su velocidad a partir del reposo (100 por
ciento de deslizamiento), disminuye su deslizamiento y su par disminuye hasta
Proyecto de titulacin.
Pgina 38
Carrera Profesional de Electrotecnia Industrial.
el valor en el que se desarrolle el par mximo. Esto hace que la velocidad
aumente todava ms, reducindose en forma simultnea el deslizamiento y el
par que desarrolla el motor de induccin.
Los pares desarrollados al arranque y al valor del deslizamiento que produce el
par mximo ambos exceden (en el caso normal) al par aplicado a la carga. Por
lo tanto la velocidad del motor aumentar, hasta que el valor del deslizamiento
sea tan pequeo que el par que se desarrolla se reduzca a un valor igual al par
aplicado por la carga. El motor continuar trabajando a esta velocidad y valor
de equilibrio del deslizamiento hasta que aumente o disminuya el par aplicado.
En la figura 2.3 se muestra la relacin entre los pares de arranque, mximo y
nominal a plena carga que desarrolla un motor de induccin, como funcin de
la velocidad de ste y del deslizamiento. Se tiene tambin la presentacin
grfica de la corriente y el par desarrollados en el rotor del motor como
funciones del deslizamiento desde el instante del arranque (punto a) hasta la
condicin de funcionamiento en estado estable (en general entre marcha en
vaco y marcha a plena carga - puntos c y d) cuando los pares desarrollado y
aplicado son iguales.
2.4.8. ARRANQUE DE UN MOTOR TRIFSICO DE INDUCCIN.
Graf. N19 red elctrica trifsica
Se denomina arranque de un motor al rgimen transitorio en el que se eleva la
velocidad del mismo desde el estado de motor detenido hasta el de motor
girando a la velocidad de rgimen permanente.
Proyecto de titulacin.
Pgina 39
Carrera Profesional de Electrotecnia Industrial.
Son necesarios los arrancadores para limitar la corriente de armadura que fluye
cuando el motor se conecta, pues en el momento de arranque la corriente que
alcanza el motor de induccin conectado directamente es de 4 a 8 veces la
corriente del mismo a plena carga, y aunque puede ser de corta duracin,
producira sobrecargas en la lnea y consecuentemente cadas de voltaje muy
incidente en la red.
2.4.9. FUNDAMENTOS BSICOS SOBRE EL CONTROL DE
VELOCIDAD DE UN MOTOR TRIFSICO DE INDUCCIN.
El motor de corriente alterna, a pesar de ser un motor robusto, de poco
mantenimiento, liviano e ideal para la mayora de las aplicaciones industriales,
tiene el inconveniente de ser un motor rgido en cuanto a la posibilidad de
variar su velocidad. La velocidad del motor asincrnico depende de la forma
constructiva del motor y de la frecuencia de alimentacin.
Como la frecuencia de alimentacin que entregan las compaas de
electricidad es constante, la velocidad de los motores asincrnicos es
constante, salvo que se vare el nmero de polos, el deslizamiento o la
frecuencia.
2.4.10. FORMAS DE CONTROL DE VELOCIDAD DE UN MOTOR
TRIFSICO DE INDUCCIN.
Se puede variar la velocidad del motor trifsico de induccin actuando sobre
las variables de las que depende.
2.4.11. CONTROL DE VELOCIDAD MEDIANTE EL CAMBIO EN LA
FRECUENCIA DE ALIMENTACIN.
Al cambiar la frecuencia elctrica aplicada al estator del motor de induccin, la
velocidad de rotacin de sus campos magnticos Nsinc cambiar en proporcin
directa al cambio de la frecuencia elctrica, y el punto de vaco sobre la curva
caracterstica par-velocidad cambiar con ella. La velocidad del motor en
condiciones nominales se llama velocidad base. Se puede ajustar la velocidad
del motor por encima o por debajo de la velocidad base, utilizando control de
frecuencia variable, como se puede ver en la fig. 2.4 donde la velocidad base
es 1800 r.p.m.
Proyecto de titulacin.
Pgina 40
Carrera Profesional de Electrotecnia Industrial.
CAPITULO III
3.0. VARIADOR DE VELOCIDAD.
3.1. CONTROLADOR DE VELOCIDAD.
Sistema motriz a las condiciones variables de los procesos involucrados. Este
control de velocidad ha jugado un papel importante en la ingeniera mecnica,
desde los inicios de la Revolucin Industrial. A principios del siglo XVIII, James
Watt desarroll e incorpor a su mquina de vapor su ya famoso gobernador
de velocidad centrfugo. Posteriormente surgieron muchas aplicaciones donde
era necesario variar la velocidad de los procesos y se desarrollaron varios
mtodos para lograrlo, tales como la moto reductores, reductores de catarinas,
bandas y poleas, embragues hidrulicos, etc. Todos ellos en su momento
fueron la mejor opcin mecnicamente hablando, para controlar o reducir la
velocidad de un determinado proceso. Sin embargo, se desarroll tambin el
motor de corriente directa cuyas condiciones de operacin lo hacen idneo
para variar su velocidad sin detrimento de sus parmetros de funcionamiento,
ya que para operar es necesario un control que alimente voltaje y corriente a su
campo y su armadura, lo que provoca, que su velocidad vare de acuerdo con
las condiciones de alimentacin de este control. Aunque todos estos procesos
son muy confiables y se aplican con mucha frecuencia an en la actualidad,
tienen una caracterstica en comn, desperdician mucha energa. Ya sea por la
gran cantidad de engranes, poleas, etc., para el caso de los de tipo mecnico,
como por el dispendio de energa en devanados, armadura, excitacin, etc. de
los motores de corriente directa; mientras que para ambos casos el
mantenimiento es complicado y costoso, lo que los hace an ms onerosos.
Debido a todos estos inconvenientes para variar la velocidad en los procesos,
se busc la manera de poder hacerlo de una forma sencilla, confiable y de bajo
costo. Esto no fue posible sino hasta finales de los setentas, ya que con el
desarrollo de la electrnica de potencia, se pudo lograr el control de velocidad
de un motor de corriente alterna de induccin, mediante la utilizacin de un
Proyecto de titulacin.
Pgina 41
Carrera Profesional de Electrotecnia Industrial.
variador de frecuencia. Este variador alimenta al motor un voltaje modulado,
con lo que simula una variacin de frecuencia en las terminales del motor y con
ello vara la velocidad de dicho motor sin detrimento considerable de sus
caractersticas de par y manteniendo la simplicidad de operacin y facilidad de
mantenimiento del motor jaula de ardilla, comparativamente con los motores de
corriente directa; adems de presentar mejores prestaciones en el control de
velocidad, de las que hablaremos posteriormente.
El Variador de Velocidad (VSD, por sus siglas en ingls Variable Speed Drive)
es en un sentido amplio un dispositivo o conjunto de dispositivos mecnicos,
hidrulicos, elctricos o electrnicos empleados para controlar la velocidad
giratoria de maquinaria, especialmente de motores. Tambin es conocido como
Accionamiento de Velocidad Variable (ASD, tambin por sus siglas en
ingls Adjustable-Speed Drive). De igual manera, en ocasiones es denominado
mediante el anglicismo Drive, costumbre que se considera inadecuada.
La maquinaria industrial generalmente es accionada a travs de motores
elctricos, a velocidades constantes o variables, pero con valores precisos. No
obstante, los motores elctricos generalmente operan a velocidad constante o
cuasi-constante, y con valores que dependen de la alimentacin y de las
caractersticas propias del motor, los cuales no se pueden modificar fcilmente.
Para
lograr
regular
la
velocidad
de
los
motores,
se
emplea
un controlador especial que recibe el nombre de variador de velocidad. Los
variadores
de
velocidad
se
emplean
en
una
amplia
gama
de
aplicaciones industriales, como en ventiladores y equipo de aire acondicionado,
equipo de bombeo, bandas y transportadores industriales, elevadores,
llenadoras, tornos y fresadoras, etc.
Un variador de velocidad puede consistir en la combinacin de un motor
elctrico y el controlador que se emplea para regular la velocidad del mismo. La
combinacin de un motor de velocidad constante y de un dispositivo mecnico
que permita cambiar la velocidad de forma continua (sin ser un motor paso a
paso) tambin puede ser designado como variador de velocidad.
Proyecto de titulacin.
Pgina 42
Carrera Profesional de Electrotecnia Industrial.
3.1.2. MOTIVOS PARA EMPLEAR VARIADORES DE VELOCIDAD.
El control de procesos y el ahorro de la energa son dos de las principales
razones para el empleo de variadores de velocidad. Histricamente, los
variadores de velocidad fueron desarrollados originalmente para el control de
procesos, pero el ahorro energtico ha surgido como un objetivo tan importante
como el primero.
Graf. N20 Aplicaciones de los variadores en bombas y ventiladores
Entre las diversas ventajas en el control del proceso proporcionadas por el
empleo de variadores de velocidad destacan:
Operaciones ms suaves.
Control de la aceleracin.
Distintas velocidades de operacin para cada fase del proceso.
Compensacin de variables en procesos variables.
Permitir operaciones lentas para fines de ajuste o prueba.
Ajuste de la tasa de produccin.
Permitir el posicionamiento de alta precisin.
Control del Par motor (torque).
Proyecto de titulacin.
Pgina 43
Carrera Profesional de Electrotecnia Industrial.
3.1.3. FOMENTAR EL AHORRO DE ENERGA MEDIANTE EL USO DE
VARIADORES DE VELOCIDAD.
Un equipo accionado mediante un variador de velocidad emplea generalmente
menor energa que si dicho equipo fuera activado a una velocidad fija
constante. Los ventiladores y bombas representan las aplicaciones ms
llamativas. Por ejemplo, cuando una bomba es impulsada por un motor que
opera a velocidad fija, el flujo producido puede ser mayor al necesario. Para
ello, el flujo podra regularse mediante una vlvula de control dejando estable la
velocidad de la bomba, pero resulta mucho ms eficiente regular dicho flujo
vlvula, ya que el motor no tendr que consumir una energa no aprovechada.
3.1.4. TIPOS DE VARIADORES DE VELOCIDAD.
Graf. N21 tipos de variadores mecnico, hidrulica y elctrico
En trminos generales, puede decirse que existen tres tipos bsicos de
variadores de velocidad: mecnicos, hidrulicos y elctrico-electrnicos. Dentro
de cada tipo pueden encontrarse ms subtipos, que se detallarn a
continuacin. Cabe aclarar que los variadores ms antiguos fueron los
mecnicos, que se emplearon originalmente para controlar la velocidad de las
ruedas hidrulicas de molinos, as como la velocidad de las mquinas de
vapores.
Proyecto de titulacin.
Pgina 44
Carrera Profesional de Electrotecnia Industrial.
Los variadores de velocidad mecnicos e hidrulicos generalmente son
conocidos como transmisiones cuando se emplean en vehculos, equipo
agroindustrial o algunos otros tipos de maquinaria.
3.1.5. VARIADORES MECNICOS.
VARIADOR
DE
PASO
AJUSTABLE:
Este
dispositivo
emplea poleas y bandas en las cuales el dimetro de una o ms
poleas puede ser modificado.
VARIADOR DE TRACCIN: Transmite potencia a travs de rodillos
metlicos. La relacin de velocidades de entrada/salida se ajusta
moviendo los rodillos para cambiar las reas de contacto entre ellos y
as la relacin de transmisin.
3.1.6. VARIADORES HIDRULICOS.
VARIADOR HIDROSTTICO: consta de una bomba hidrulica y un
motor hidrulico (ambos de desplazamiento positivo). Una revolucin
de la bomba o el motor corresponde a una cantidad bien definida de
volumen del fluido manejado. De esta forma la velocidad puede ser
controlada mediante la regulacin de una vlvula de control, o bien,
cambiando el desplazamiento de la bomba o el motor.
a) ADAPTANDO LAS CAPACIDADES DE UNA BOMBA A LA DEMANDA
DEL PROCESO
Continuamos hablando de las estrategias a tener en cuenta para reducir el
consumo energtico en bombas centrfugas y en esta ocasin nos centramos
en la adaptacin de las capacidades de la bomba a las capacidades del
proceso.
Proyecto de titulacin.
Pgina 45
Carrera Profesional de Electrotecnia Industrial.
Como hemos visto en otros artculos el diseo los motores y bombas no suelen
estar en la mayora de las ocasiones bien adaptados a la carga con la que
trabajan. Eso origina un consumo energtico bastante superior al previsto.
Veamos cmo podemos solucionar el problema.
La capacidad de una bomba centrfuga puede recularse ya sea por:
Velocidad constante.
Velocidad variable.
Capacidad de regulacin por velocidad variable.
La regulacin de la velocidad es eficiente ya que la energa a la bomba
se reduce con el incremento de la velocidad.
La velocidad de la bomba puede variar con:
Variadores hidrostticos/hidrulicos - acoplamiento hidrulico entre eje
de entrada y salida - el ratio de velocidad de 5 a 1 se controla ajustando
el volumen de aceite en el acoplamiento.
Variadores mecnicos - variador de roldana y correa.
Embrague/transmisin de corrientes de Foucault - par de carga de
transferencia de acoplamiento magntico entre el eje de entrada y
salida.
Variadores de velocidad variable - inversores - variadores AC variadores de frecuencia ajustable - operan mediante la variacin de la
frecuencia y el voltaje al motor elctrico.
Los cambios en el consumo de energa, cambios en altura y volumen
pueden ser estimados con las leyes de afinidad que veremos en la
segunda parte de este artculo.
b) REGULACIN DE CAPACIDAD POR VELOCIDAD CONSTANTE.
La capacidad de una bomba puede variar con:
Proyecto de titulacin.
Pgina 46
Carrera Profesional de Electrotecnia Industrial.
1) Estrangulamiento; El estrangulamiento puede llevarse a cabo abriendo y
cerrando una vlvula de descarga. El estrangulamiento es ineficiente en
energa ya que la energa a la bomba no se reduce. La energa se derrocha
incrementando la prdida dinmica.
Caudal de derivacin. La capacidad de descarga puede ser regulada
llevando una parte del caudal de descarga al lado de succin de la
bomba. El caudal de derivacin es ineficiente ya que la energa a la
bomba no se reduce.
Dimetro del impulsor cambiante. La reduccin del dimetro de los
impulsores es un cambio permanente.
Modificacin del impulsor. El caudal y la altura manomtrica pueden
modularse cambiando las hlices de las bombas. Se trata de un proceso
complicado que se utiliza raramente.
Regulacin de la bomba y consumo de energa.
El consumo de energa de algunos de los mtodos de regulacin puede verse
en la siguiente figura:
Proyecto de titulacin.
Pgina 47
Carrera Profesional de Electrotecnia Industrial.
Graf. N22 Adaptando las capacidades de una bomba a la demanda del
proceso.
El cambio en el consumo de energa de una bomba en funcin de la altura
manomtrica y el caudal volumtrico puede determinarse con las leyes de
afinidad. Veamos cmo aplicarlas fcilmente:
Las leyes de afinidad de las bombas centrfugas o ventiladores indican la
influencia en la capacidad de volumen, altura manomtrica (presin) y/o
consumo de la bomba o ventilador debido a:
Cambio en la velocidad en revoluciones por minuto del rodete de la bomba.
Similaridad geomtrica - cambio en el dimetro del impulsor.
Las leyes de afinidad son idnticas en ventiladores y bombas.
Sin entrar en detalles de clculo a los que nos referiremos al final vamos a
hacer unas reflexiones sobre cmo cambia el consumo de la bomba conforme
aumenta la velocidad del rodete.
En la figura mostramos cmo para un rodete vara el consumo energtico
conforme
aumenta
la
velocidad.
De
ella
entraremos
las
siguientes
conclusiones:
Proyecto de titulacin.
Pgina 48
Carrera Profesional de Electrotecnia Industrial.
2) Variador hidrodinmico; Emplea aceite hidrulico para transmitir par
mecnico entre un impulsor de entrada (sobre un eje de velocidad constante) y
un rotor de salida (sobre un eje de velocidad ajustable). Tambin
llamado acoplador hidrulico de llenado variable.
Voith es el fabricante lder de acoplamientos hidrodinmicos de velocidad
variable y convertidores de torque alrededor del mundo. Los acoplamientos son
utilizados en la industria de la generacin elctrica, del gas y del petrleo, la
industria qumica y de transformacin de materias primas para controlar
bombas, compresores, ventiladores y molinos; as como para el arranque de
turbinas de gas. Las aplicaciones de nuestros equipos se caracterizan por
requerir alta confiabilidad, seguridad operacional y disponibilidad en conjunto
con un bajo costo de operacin y mantenimiento. Mediante el uso
acoplamientos Voith de velocidad variable se puede lograr un considerable
ahorro energtico y econmico, flexibilizar procesos, extender la vida de la
maquinaria y el motor adems reducir el gasto en mantenimiento de un tren
motriz. Nuestra tecnologa permite a nuestros equipos operar en las
condiciones ms adversas con un diseo robusto y compacto. Nuestro rango
de operacin parte de 100kW hasta 50,000 kW y velocidades de hasta 20,000
rpm. , estos productos se pueden encontrar en:
Bombas, ventiladores y compresores centrfugos.
Bombas y compresores de desplazamiento positivo.
Agitadores industriales y mquinas centrfugas.
Convertidor de Torque Los convertidores de torque Voith son unidades
hidrodinmicas que varan continuamente el torque y la velocidad entre la
flecha de entrada y la de salida. Debido a sus caractersticas de torquevelocidad, el convertidor de torque es ideal para auxiliar al arranque de
gas.
3) variador hidroviscoso; consta de uno o ms discos conectados con un eje
de entrada, los cuales estar en contacto fsico (pero no conectados
mecnicamente) con uno o ms discos conectados al eje de salida. El par
mecnico (torque) se transmite desde el eje de entrada al de salida a travs de
Proyecto de titulacin.
Pgina 49
Carrera Profesional de Electrotecnia Industrial.
la pelcula de aceite entre los discos. De esta forma, el par transmitido es
proporcional a la presin ejercida por el cilindro hidrulico que presiona los
discos.
3.2.0. VARIADORES ELCTRICO-ELECTRNICOS.
Existen cuatro categoras de variadores de velocidad elctrico-electrnicos:
o Variadores para motores de CC.
o Variadores de velocidad por corrientes de Eddy.
o Variadores de deslizamiento.
o Variadores para motores de CA (tambin conocidos como variadores de
frecuencia).
3.2.1. TIPOS DE VARIADORES ELCTRICO-ELECTRNICOS.
Los variadores elctrico-electrnicos incluyen tanto el controlador como
el motor elctrico, sin embargo es prctica comn emplear el trmino variador
nicamente al controlador elctrico.
Los primeros variadores de esta categora emplearon la tecnologa de los tubos
de vaco. Con los aos despus se han ido incorporando dispositivos de estado
slido, lo cual ha reducido significativamente el volumen y costo, mejorando la
eficiencia y confiabilidad de los dispositivos.
3.2.2. VARIADORES PARA MOTORES DE CC.
Graf. N23 controlador de velocidad en corriente continua serie
Proyecto de titulacin.
Pgina 50
Carrera Profesional de Electrotecnia Industrial.
Estos variadores permiten controlar la velocidad de motores de corriente
continua serie, derivacin, compuesto y de imanes permanentes. Para el caso
de cualquiera de las mquinas anteriores se cumple la siguiente expresin:
Vt = K.FM.Nm
Dnde:
= Voltaje terminal (V).
= constante de la mquina.
= Flujo magntico producido por el campo (Wb)
=Velocidad mecnica (rpm).
Despejando la velocidad mecnica, se obtiene:
Vt
K . FM
Entonces, de (2) puede observarse que la velocidad mecnica de un motor de
CC es directamente proporcional al voltaje terminal (VT) e inversamente
proporcional al flujo magntico (FM), el cual a su vez depende de la corriente
Proyecto de titulacin.
Pgina 51
Carrera Profesional de Electrotecnia Industrial.
de campo (IF). Aprovechando esta situacin es que este tipo de variadores
puede controlar la velocidad de un motor de CC: controlando su voltaje
terminal, o bien, manipulando el valor de la corriente de campo.
3.2.3. VARIADORES POR CORRIENTES DE EDDY.
Un variador de velocidad por corrientes de Eddy consta de un motor de
velocidad fija y un embrague de corrientes de Eddy. El embrague contiene un
rotor de velocidad fija (acoplado al motor) y un rotor de velocidad variable,
separados por un pequeo entrehierro. Se cuenta, adems, con una bobina de
campo, cuya corriente puede ser regulada, la cual produce un campo
magntico que determinar el par mecnico transmitido del rotor de entrada al
rotor de salida. De esta forma, a mayor intensidad de campo magntico, mayor
par y velocidad transmitidos, y a menor campo magntico menores sern el par
y la velocidad en el rotor de salida. El control de la velocidad de salida de este
tipo de variadores generalmente se realiza por medio de lazo cerrado,
utilizando como elemento de retroalimentacin un tacmetro de CA.
3.2.4. VARIADORES DE DESLIZAMIENTO.
Este tipo de variadores se aplica nicamente para los motores de
induccin de rotor devanado. En cualquier motor de induccin, la velocidad
mecnica (nM) puede determinarse mediante la siguiente expresin:
Donde s es el deslizamiento del motor, cuyo valor oscila entre 0 y 1. De esta
forma, a mayor deslizamiento, menor velocidad mecnica del motor. El
deslizamiento puede incrementarse al aumentar la resistencia del devanado del
rotor, o bien, al reducir el voltaje en el devanado del rotor. De esta forma es que
puede conseguirse el control de la velocidad en los motores de induccin de
Proyecto de titulacin.
Pgina 52
Carrera Profesional de Electrotecnia Industrial.
rotor devanado. Sin embargo, este tipo de variadores es de menor eficiencia
que otros, razn por la cual en la actualidad tiene muy poca aplicacin.
3.2.5. VARIADORES PARA MOTORES DE CA.
Los variadores de frecuencia (siglas AFD ,del ingls Adjustable
Frecuency Drive; o bien VFD Variable Frecuency Drive) permiten controlar la
velocidad tanto de motores de induccin (asncronos de jaula de ardilla o
de rotor devanado), como de los motores sncronos mediante el ajuste de la
frecuencia de alimentacin al motor. Para el caso de un motor sncrono, la
velocidad se determina mediante la siguiente expresin:
Cuando se trata de motores de induccin, se tiene:
Como puede verse en las expresiones (4) y (5), la frecuencia y la velocidad son
directamente proporcionales, de tal manera que al aumentar la frecuencia de
alimentacin al motor, se incrementar la velocidad de la flecha, y al reducir el
valor de la frecuencia disminuir la velocidad del eje. Por ello es que este tipo
de variadores manipula la frecuencia de alimentacin al motor a fin de obtener
el control de la velocidad de la mquina.
Estos variadores mantienen la razn Voltaje/ Frecuencia (V/Hz) constante entre
los valores mnimo y mximos de la frecuencia de operacin, con la finalidad de
evitar la saturacin magntica del ncleo del motor y adems porque el hecho
de operar el motor a un voltaje constante por encima de una frecuencia dada
(reduciendo la relacin V/Hz) disminuye el par del motor y la capacidad del
mismo para proporcionar potencia constante de salida.
Proyecto de titulacin.
Pgina 53
Carrera Profesional de Electrotecnia Industrial.
3.3.0. VARIADOR DE FRECUENCIA.
Graf. N24 equipo variador de frecuencia
.
DEFINICION: El Variadores de frecuencia: se trata de dispositivos electrnicos,
que permiten el control completo de motores elctricos de induccin; los hay de
c.c. (variacin de la tensin), y de c.a. (variacin de la frecuencia); los ms
utilizados son los de motor trifsico de induccin y rotor sin bobinar. Una de las
serias limitaciones del motor de induccin es la de tener velocidades fijas sin
posibilidades de variacin como lo permite un motor de corriente directa; siendo
que los procesos y aplicaciones requieren diferentes velocidades y torques, se
han desarrollado una infinidad de mtodos para cambiar y variar las
velocidades de placa de los motores de induccin, pero o bien la eficiencia es
baja o el costo del equipo y mantenimiento es alto. Uno de estos mtodos es el
variador de frecuencia (VDF) y aqu veremos cules son las ventajas de este
mtodo por sobre los dems en determinadas aplicaciones. La principal ventaja
de los VDF es la posibilidad de disminuir los consumos de energa elctrica en
algunos de los procesos que controla, dando como resultado considerables
disminuciones en los costos de operacin. La alta confiabilidad en los VDF y la
disminucin de los precios en los mismos han permitido que cada da se
instalen ms equipos en Mxico y en todo el mundo; debido a esto y otras
ventajas adicionales que ms adelante se comentarn en este curso, es
necesario para cualquier persona involucrada con el mantenimiento elctrico, y
el ahorro de energa en el sector elctrico llegar a conocer y entender los
Proyecto de titulacin.
Pgina 54
Carrera Profesional de Electrotecnia Industrial.
principios bsicos del funcionamiento y aplicaciones de los VDF. El desarrollo e
investigacin en el campo de la electrnica de potencia para el control y
variacin de velocidad en los motores de C.A. ha aumentado ms rpidamente
que en el de C.D. por las ventajas que se obtienen.
CARACTERSTICAS DE OPERACIN DE UN VARIADOR DEFRECUENCIA.
El variador de frecuencia variable es conocido con diferentes nombres;
variadores de velocidad, drive, inversor, etc.; pero el nombre correcto es el de
variador de frecuencia pues incorpora el trmino de frecuencia que es lo
correcto en este caso, pues variadores de velocidad lo son la mayora aunque
la variacin la hagan por mtodos mecnicos o por C.D., e inversores solo se
refiere a uno de los pasos del VDF. La manera como un VDF convierte voltaje y
frecuencia constante en voltaje y frecuencia variable se basa en un proceso de
3 pasos principales. Primero la corriente alterna es rectificada y convertida a
voltaje de corriente continua, despus la invierte y vuelve a entregar corriente
alterna pero con valores de frecuencia y voltaje variables. El suministro de
voltaje de un VDF puede realizarse a frecuencias que van desde 0 hz hasta
300 o ms Hz; por lo tanto la velocidad del motor es variable en la misma
proporcin que la variacin de la frecuencia, as el motor puede girar lento o
muy rpido dependiendo de la frecuencia que le suministra el VDF. Al mismo
tiempo el voltaje tambin es variable en la misma proporcin que la variacin
de la frecuencia para asegurar que la relacin voltaje/frecuencia se mantenga
con el mismo valor en todo el rango de velocidades mientras no pase de 60 Hz.
Esto es porque el par que entrega el motor segn diseo es determinado por
esta relacin y un motor de 460 volts tendr una relacin volt/frec de 7.6, si
este mismo motor lo manejamos a una frecuencia de 30 Hz. tendremos que
suministrarle un voltaje de 230 volts para mantener la misma relacin yel
mismo par. Cualquier cambio en esta relacin puede afectar el par,
temperatura, velocidad o el ruido del mismo.
Graf. N25 voltaje/frecuencia se mantienes al mismo tiempo
Proyecto de titulacin.
Pgina 55
Carrera Profesional de Electrotecnia Industrial.
Por lo que se deduce que para producir el par nominal en cada motor a
diferentes velocidades, es necesario modificar el voltaje suministrado conforme
modificamos
la
frecuencia.
El
VDF
mantiene
esa
relacin
de
volt/hertz suministrada al motor de manera automtica.
3.3.1. PARTES DEL VARIADOR DE FRECUENCIA.
Graf. N26 Estructura general de un variador de velocidad elctrica
Bsicamente todos los variadores de frecuencia estn formador por tres
partes principales.
1.- RECTIFICADOR DE C.D.- La parte rectificadora en el VDF convierte
el voltaje en C.A. en voltaje en C.D. que es ms fcil internamente para el VFD
para generar la frecuencia variable de salida necesaria de una fuente no
alterna de voltaje, dependiendo del tipo de VDF este voltaje de C.D. puede ser
fijo o variable. La mayora de los VDF manufacturados actualmente son del tipo
Proyecto de titulacin.
Pgina 56
Carrera Profesional de Electrotecnia Industrial.
de modulacin del ancho del pulso (PWM por sus siglas en ingls) que operan
con un voltaje en C.D. suavizado. Los diodos de potencia son usados para
producir el voltaje de C.D. fijo y los rectificadores controlados de silicio (SCRs
por sus siglas en ingls) son usados para el de voltaje de C.D. variable. Es
importante hacer notar que el voltaje del bus de c.d. es 1.41veces mayor al
voltaje de c.a. pues toma el valor del pico de voltaje y no el voltaje rms, por lo
que el voltaje en bus de c.d. de un VDF de 460 volts ser de 648 v.c.d.
2.-FILTRO ENLACE.- El cual dependiendo del tipo de variador, es
como est conformado; tambin se denomina a esta parte bus de corriente
directa.
3.-INVERSOR.- Como se mencionaba, este es slo uno de los pasos del
VDF y no representa la funcin total del mismo. En esta seccin el voltaje en
c.d. se invierte y vuelve a tomar la forma alterna por medio de rectificadores
controlados de silicio o transistores de potencia conectados directamente al bus
de c.d. y controlados por microprocesadores, pero esta vez con una frecuencia
y voltaje variables. Esta generacin trifsica de c.a. al hacerse a travs de
aperturas instantneas de los transistores aunque tiene ciclos positivos y
negativos toma una forma cuadrtica e interrumpida similar a la alimentacin
de entrada simulando la onda senoidal, segn las necesidades de frecuencia
pero que mantiene la misma relacin volts/Hertz para el motor, a esta
tecnologa se le llama modulacin del ancho del pulso. (Pulse Width Modulation
PWM por sus siglas en ingls). Una tarjeta lgica de microprocesadores
determina la frecuencia de conmutacin de la seccin de inversin, permitiendo
un rango amplio de frecuencias de salida al motor, que van desde 0 hasta 300
Hz o ms Hertz.
Proyecto de titulacin.
Pgina 57
Carrera Profesional de Electrotecnia Industrial.
Graf. N27 Principio de operacin de modulacin del ancho del pulso
3.3.2. TIPOS DE VARIADORES DE FRECUENCIA.
De acuerdo con la tecnologa utilizada, los arreglos de sus componentes
y los componentes utilizados, son varios los tipos de variadores de frecuencia
que existen, bsicamente existen tres tipos, CSI, inversin de la corriente de
alimentacin (CurrentSourceInverter), VSI, inversin del voltaje de alimentacin
(Voltaje SourceInverter) y PWM, Modulacin de Ancho de Pulso (Pulse
WidthModulation), Aunque los ms utilizados son estos ltimos; por lo que
hablaremos solamente de estos.
3.3.3. VARIADOR TIPO MODULACIN DEL ANCHO DEL PULSO (PWM).
La "Modulacin del ancho del pulso" (PWM) ha sido la tecnologa ms
usada en los VDF pues ha dado buenos resultados para controlar motores
desde 1/4 h.p. hasta 1000 h.p. debido a su confiabilidad, adaptacin y porque
genera la menor cantidad de armnicos a la lnea. Aproximadamente 100
fabricantes
trabajan
con esta
tecnologa
a nivel
mundial En
esta tecnologa la seccin de inversin es realizada por un puente de diodos y
capacitores de C.D. para crear y mantener un voltaje estable y suavizado en
C.D. Esta operacin se realiza usando la tecnologa de transistores bipolares
de compuerta aislada (isolated gate bipolar transistor IGBT por sus siglas en
ingls) los cuales regulan el voltaje y frecuencia para simular un voltaje que
aunque es cuadrtico es muy similar al senoidal. El mismo trmino "modulacin
del ancho del pulso" explica cmo cada transicin de voltaje alterno es una
serie de pulsos cortos de diferente ancho. Variando el ancho del pulso en cada
ciclo el promedio simula la onda senoidal. El nmero de transiciones del
positivo al negativo por segundo determina la frecuencia suministrada al motor.
Proyecto de titulacin.
Pgina 58
Carrera Profesional de Electrotecnia Industrial.
Al tener un mayor nmero de pulsos en cada medio ciclo, el ruido asociado a
los motores controlados por VDF se reduce, al igual que la onda de corriente es
suavizada y se eliminan los picos. Las velocidades de switcheo o de resolucin
de los IGBT`s en un convertidor PWM pueden tener rangos desde 2 khz hasta
18 o ms khz. Las ventajas de este mtodo es un excelente factor de potencia
debido al voltaje del bus de C.D. suavizado, no hay disfunciones en
la operacin del motor a bajas velocidades, tiene una eficiencia mayor al 92 %,
puede controlar varios motores con un solo VDF, habilidad para sobreponerse a
las prdidas de potencia en frecuencias de 3 a 5 Hz, y un costo bajo. Entre las
desventajas, y hay que considerarlas es el calentamiento del motor y fallas en
el aislamiento en algunas aplicaciones debido a la alta frecuencia de
resolucin, y la imposibilidad de regeneracin; as como generacin de
armnicas en la lnea, en algunas aplicaciones muy especficas.
Graf. N28 Diagrama esquemtico del variador tipo modulacin del ancho
del pulso (PWM).
3.3.4. VARIADORES TIPO FLUJO VECTORIAL.
Existe una tecnologa que aunque usa los principios de la modulacin
del ancho de pulso ha sido mejorada con microprocesadores de 32 bits
llamados inteligentes y que son usados en los Variadores de Flujo Vectorial o
Vector Drives en ingls. Los variadores de C.A. siempre han estado limitados a
aplicaciones de par normal mientras que las de alto par, y bajas rpm han sido el
dominio de los de C.D. Esto ha ido cambiando recientemente con la
Proyecto de titulacin.
Pgina 59
Carrera Profesional de Electrotecnia Industrial.
introduccin de una nueva generacin de la tecnologa PWM, el variador de
flujo vectorial.
El mtodo de control de par usado en el VDF de flujo vectorial es similar al
usado en los de C.D., incluyendo un amplio rango de velocidades con una
rpida respuesta. Este variador tiene la misma seccin de potencia que los
PWM, pero usa un sofisticado control de lazo cerrado del motor al
microprocesador del variador de frecuencia. La posicin y velocidad del rotor es
monitoreada en tiempo real a travs de un posicionador o codificador digital
que determina y controla la velocidad, par y potencia del motor. Al controlar la
seccin de inversin en respuesta a las condiciones actuales de la carga en
tiempo real, se obtiene un control excelente del par. Las ventajas de este tipo
de variador son: un excelente control de velocidad, par y potencia, una
respuesta rpida a los cambios de carga, velocidad y par demandados; 100 %
de par a velocidad 0; costos de mantenimiento relativamente bajos comparados
con los controles y motores de C.D. El objetivo es controlar el par del motor en
lugar de la velocidad y por lo tanto tienen respuestas ms rpidas y precisas a
las variaciones del par demandado por la carga. Para lograr esto, el variador
explora al motor haciendo un auto reconocimiento (autotuning), inyectndole
corriente y voltaje para saber cmo se comporta y cules son sus valores
caractersticas, para crear un algoritmo o modelo de sus caractersticas de
funcionamiento y poder controlarlo de la manera ms adecuada. Esto se puede
hacer con carga y sin carga del motor; una vez hecho esto se configura en la
memoria del VDF un modelo matemtico del motor con el que se va a trabajar
guardndolo inclusive cuando se desconecta totalmente. Durante la operacin,
el modelo recibe la informacin de la corriente en alterna que el motor
demanda en sus3 fases, los valores de voltaje del bus de C.D. adems del
estado de los switch de potencia. Con estos datos se calcula el flujo en el
estator, el par, la frecuencia y la velocidad de cada ciclo; y hay un ciclo cada
10milisegundos. Adems de esto el modelo estima la resistencia en el estator;
este valor lo obtiene comparando los datos obtenidos de la identificacin
inicial y en la subsecuente operacin del mismo. La diferencia en el mdulo de
inversin comparada con la tecnologa PWM bsica es que, esta tiene una
frecuencia de conmutacin o comnmente switcheo fijada de acuerdo a las
Proyecto de titulacin.
Pgina 60
Carrera Profesional de Electrotecnia Industrial.
necesidades, mientras que en los variadores recientes esta frecuencia de
switcheo se modifica de acuerdo con las necesidades de par de la carga, en
este tipo de variadores se sigue usando la tecnologa de IGBT. Este tipo de
variadores de frecuencia es ideal para aplicaciones de una complejidad mayor
que generalmente se controlan con motores de C.D. como extrusoras, gras,
elevadores, mquinas centrfugas, mquinas de papel, impresoras, maquinaria
de embalaje, embobinadoras, y otras aplicaciones con requerimientos
similares. Entre las ventajas de esta tecnologa es eliminar el sobrecosto de los
elementos de retroalimentacin o codificacin que en la mayora de los casos
representan del 20 al 30 % del costo de la inversin. Otra de las ventajas es
una velocidad de respuesta mayor a los cambios de velocidad y par que los
dems variadores incluyendo al de flujo vectorial, 100 % de par a velocidad 0;
as como par constante en todo el rango de velocidades. En todas las
aplicaciones de VDF hay que tener muy presentes el calentamiento que pueda
llegar a sufrir el motor al disminuir la velocidad del ventilador de enfriamiento
acoplado al mismo en la parte posterior. Si el motor va a trabajar en rangos de
velocidad de 0 a 15-20 Hz durante lapsos prolongados, se recomienda instalar
ventilacin extra a la del motor para asegurar el enfriamiento adecuado;
algunas marcas manejan el motor con ventilacin acoplada pero conectada
elctricamente independiente a un alimentador de 120 volts. El VDF ha llegado
a ser uno de los mtodos de control de motores que ms han avanzado
tecnolgicamente en los ltimos aos, disminuyendo costos, tamaos y
mejorando la simplicidad de operacin y ha llegado a normalizarse tanto que
casi todas las marcas ofrecen las mismas caractersticas de operacin; al
incluir la electrnica de potencia en base a microprocesadores como el
fundamento de operacin, las ventajas adicionales que ofrecen algunas marcas
son mnimas con respecto a otras pero que deben de ser consideradas al
momento de hacer la eleccin: como el idioma de programacin y lectura;
facilidad de programacin; datos que aporta el equipo como amperaje, %
de par, potencia, voltajes, status, etc.; pantallas remotas; reactores de choque
para disminuir armnicos; desconectadores internos; fusibles de accin rpida
integrados; control PID ;etc. Lo que realmente hace la diferencia entre un
equipo y otro es la calidad de los componentes que lo integran y el servicio pre
y posventa del mismo.
Proyecto de titulacin.
Pgina 61
Carrera Profesional de Electrotecnia Industrial.
3.3.5 VARIADORES DE FRECUENCIA QUE NO PRODUCEN ARMNICAS.
Actualmente la tecnologa en la fabricacin de variadores de frecuencia
para media y baja tensin, lleva ya varios aos desarrollando variadores de
frecuencia que producen bajos contenidos de armnicas tanto hacia el motor
como hacia la lnea de alimentacin. Estos variadores de frecuencia,
adems de proporcionar los beneficios del control de la velocidad y el ahorro de
energa, no provocan distorsiones a la lnea de alimentacin ni daos al motor.
Por lo cual, para su aplicacin no es necesario degradar la potencia del motor
ni sobredimensionar el aislamiento del cable o del motor, para el caso de media
tensin. La forma como se consigue eliminar las armnicas es instalando
transformadores de alimentacin con devanados secundarios aislados entre si
y desfasados de cierta forma, que las armnicas se eliminan entre ellas.
Graf. N29 lazo de control de velocidad y lazo de control de torque
Proyecto de titulacin.
Pgina 62
Carrera Profesional de Electrotecnia Industrial.
3.3.6. APLICACIONES INDUSTRIALES DE LOS VARIADORES DE
FRECUENCIA.
Los variadores de velocidad tienen una amplia gama de aplicaciones,
de aqu que las principales industrias donde se utilizan los variadores de
velocidad son las siguientes:
Metalrgicas: Chapas y laminados, perfiles de hierro, aluminio, cables,
torneras, electrodomsticos, revestimiento de caos, fundiciones,
fresadoras, electrodos, etc.
Alimenticias: Los variadores de frecuencia tiene gran acogida en la
industria alimenticia como panificadoras, galletas, pastas secas, pastas
frescas, chocolates, golosinas, lcteos, azcar, margarinas, frigorficos,
quesos, grasas animales, molinos harineros, mantecas, criaderos de
pollos, aceiteras, frutcolas, jugueras, aguas minerales, bodegas
vitivincolas, cerveceras, productos balanceados, etc.
Construccin: Edificios, autopistas, cementeras, tejas, azulejos, pisos,
ladrillos, bloques, fibrocemento, pretensados, aberturas, sanitarios,
membranas asflticas, caleras, arenas especiales, etc.
Automovilsticas: La industria automovilstica utiliza los variadores de
frecuencia en montadoras de autos, montadoras de camiones, mnibus,
auto partes, tapizados, plsticos, radiadores, neumticos, rectificadora
de motores, etc.
Plsticos: Perfiles, poliestireno, telgopor, impresoras, envases, juguetes,
muebles, bolsas, etc.
Papeleras: Papel, cartn, corrugados, cajas, papel higinico, bobinas,
bolsas, envases, etc.
Cueros: Curtiembres, tintoreras, cuerinas, calzados, ropas, etc.
Proyecto de titulacin.
Pgina 63
Carrera Profesional de Electrotecnia Industrial.
Qumicas: Laboratorios medicinales, pintureras, adhesivos, detergentes,
jabones,
explosivos,
acrlicos,
anilinas,
insecticidas,
fertilizantes,
petroqumicas, etc.
Petroleras: Petrleos, refineras, lubricantes, destileras, etc.
Textiles: Tejidos, tintoreras, lavaderos, hilanderas, etc.
Madereras: Aserraderos, muebles, impregnadoras, laminados, tableros,
terciados, etc.
Caucho: Neumticos, gomas, ltex, etc.
Otras: Aeronuticas, tabacaleras, vidrio, aguas sanitarias, cerealeras,
universidades, empresas de ingeniera, minera, aceras, agropecuarias,
preparadores de vehculos de competicin, etc.
3.3.7. ELEMENTOS DE PROTECCIN Y MONITOREO.
Los variadores de velocidad aseguran tanto la proteccin trmica de los
motores como su propia proteccin. A partir de la medida de la corriente y de
una informacin sobre la velocidad, un microprocesador calcula la elevacin de
temperatura de un motor y suministra una seal de alarma o de desconexin
en caso de calentamiento excesivo. Adems, los variadores, y especialmente
los convertidores de frecuencia, estn dotados de protecciones contra:
Cortocircuitos entre fases y; entre fase y tierra.
Sobretensiones y las cadas de tensin.
Desequilibrios de fases.
Funcionamiento en monofsico,
Proyecto de titulacin.
Pgina 64
Carrera Profesional de Electrotecnia Industrial.
3.3.8. ESTRUCTURA Y COMPONENTES DE LOS VARIADORES
ELECTRNICOS.
Se componen de dos mdulos generalmente montados en una misma
envolvente:
Un mdulo de control del funcionamiento del aparato.
Un mdulo de potencia que alimenta el motor con energa elctrica.
a) MDULO DE CONTROL: Todas las funciones se controlan mediante un
microprocesador que gestiona la configuracin, las rdenes transmitidas
por las medidas como velocidad, corriente, etc.
El microprocesador gestiona las rampas de aceleracin y
desaceleracin, el control de la velocidad y la limitacin de
corriente, generando las seales de control de los componentes
de potencia.
Los lmites de velocidad, las rampas, los lmites de corriente y
otros datos de configuracin se definen utilizando un teclado
integrado o mediante PLC o mediante PC.
Del mismo modo los diferentes comandos (marcha, parada,
frenado), pueden proporcionarse mediante interfaces de dilogo
hombre/mquina, utilizando autmatas programables o PC.
Los parmetros de funcionamiento y las informaciones de alarma,
y los defectos pueden verse mediante displays, diodos LED, etc.
b) MDULO DE POTENCIA: El mdulo de potencia est principalmente
constituido por:
Componentes de potencia (tiristores, diodos).
Interfaces de medida de las tensiones y/o corrientes.
En aparatos de gran calibre, un conjunto de ventilacin.
Graf. N30 Estructura general de un variador de frecuencia elctrico.
Proyecto de titulacin.
Pgina 65
Carrera Profesional de Electrotecnia Industrial.
3.3.9. TIPOS DE CARGAS.
a) PAR Y POTENCIA.
Hay que aclarar que la potencia y el par son dos valores diferentes y que nos
indican dos caractersticas del motor independientes; mientras que el par es un
sistema formado por dos fuerzas que obran sobre lneas de accin paralelas no
coloniales y son iguales y de sentido opuesto y que producen o impiden una
rotacin; la potencia se define como el trabajo realizado en la unidad de tiempo,
y las dos se relacionan y rigen, hablando de motores por la siguiente ecuacin:
POTENCIA (HP) = PAR ( KG-M ) X RPM / 7124.
b) CARGAS DE PAR CONSTANTE.
Es la carga que demanda del motor un par o torque constante en
cualquier rango de velocidad; ejemplos de este tipo de carga son elevadores,
bandas
transportadoras,
maquinaria
textil,
impresoras,
bombas
de
desplazamiento positivo y de pistn, extrusoras, mezcladoras, compresores
reciprocantes, etc.; y representan el 80 % de los motores instalados. En este
tipo de carga el motivo principal para la aplicacin de los VDF es la
optimizacin del proceso y rara vez hay ahorros de energa; a menos de que se
cumplan estas dos condiciones: que la potencia demandada sea menor a la
nominal y que esto sea a velocidades menores.
Proyecto de titulacin.
Pgina 66
Carrera Profesional de Electrotecnia Industrial.
Graf. N31 Curva de par y potencia para una carga de par constante.
c) CARGAS DE PAR VARIABLE.
Es el tipo de carga en la cual las necesidades de par o torque van
disminuyendo conforme la velocidad del motor y por consiguiente de la carga
tambin disminuyet. Este tipo de carga se encuentra comnmente en
aplicaciones de flujo variable, como bombas y ventiladores centrfugos.
Ejemplos de estos son los ventiladores y bombas centrfugas, agitadores
y compresores axiales; y el VDF ofrece grandes oportunidades de ahorro pues
sus requerimientos de potencia disminuyen considerablemente conforme la
velocidad es menor.
Graf. N32 Curva de par y potencia para una carga de par variable.
Proyecto de titulacin.
Pgina 67
Carrera Profesional de Electrotecnia Industrial.
d) CARGAS DE POTENCIA CONSTANTE.
Es el tipo de carga, que no importa la velocidad a la que est girando el
motor pues siempre va a estar demandando la potencia mxima, pues as lo
demanda la carga. Sin embargo, al incrementarse la velocidad, la demanda de
par se reduce y viceversa. Estas cargas se encuentran bsicamente en
mquinas herramientas, bobinadoras, dobladoras, troqueladoras, molinos,
bombas centrfugas de alta inercia; en estas cargas difcilmente podremos
obtener ahorros de energa, debido a que el proceso exige el mximo de la
potencia o en todo caso KW. Como es de vital importancia conocer el tipo de
aplicacin donde queremos instalar un variador de frecuencia; tambin es
importante conocer algunos otros datos que nos ayudarn a hacer la eleccin
correcta y evitar errores que nos pueden costar dinero y tiempo. Es importante
conocer los rangos de velocidades en los que va a trabajar nuestra carga; a
que porcentaje de carga est trabajando si es implementacin de variador en
un proceso ya establecido, cual es la potencia mxima y mnima que la carga
demanda, que par necesitamos al arranque, etc. Estos datos se conocen
a travs de la informacin tcnica proporcionada por los fabricantes de los
equipos ya travs de mediciones realizadas en campo si es el caso de que el
equipo ya est funcionando y queramos determinar los porcentajes de carga a
la que est trabajando; y una vez conocindolos dimensionar exactamente las
capacidades de nuestros equipos para determinar qu es lo que necesitamos y
que nuestro sistema trabaje con la mejor eficiencia posible. Muchas de las
aplicaciones de velocidad variable utilizan reductores despus del motor debido
a las necesidades de velocidades bajas y pares altos; ya sea que la reduccin
se haga por medios mecnicos como engranes, poleas, bandas, etc., es
necesario tomar en cuenta las relaciones de reduccin y considerar el motor y
el reductor exacto para el caso especfico.
Proyecto de titulacin.
Pgina 68
Carrera Profesional de Electrotecnia Industrial.
Graf. N33 Curva par potencia para una carga de potencia constante.
3.4.0. AHORRO DE ENERGA CON VARIADORES DE FRECUENCIA.
3.4.1 AHORRO DE ENERGA EN CARGAS DE PAR VARIABLE.
Debido a que la aplicacin de VDF en los procesos de par variable son
los que nos dan un mayor ahorro de energa, en este captulo veremos cules
son las caractersticas y por qu del ahorro en este tipo de cargas. Como ya
vimos las cargas de par variable son las que involucran movimientos de fluidos
como agua y aire, y el mayor nmero de estas aplicaciones son bombas y
ventiladores centrfugos. Se considera por los potenciales de ahorro de energa
que el 70% de las aplicaciones de los accionamientos de velocidad variable
son en este tipo de cargas. Primero veremos cules son las leyes que rigen
estos sistemas y que nos permiten tener ahorros de energa en velocidades
menores a las nominales. En cualquier sistema de movimientos de fluidos por
medio de impulsores centrfugos que en este caso puede ser un ventilador o
una bomba; el caudal Q , que es un valor dado en volumen por unidad de
tiempo siempre va a estar relacionado proporcionalmente a la velocidad del
impulsor; por ejemplo si un ventilador centrfugo que gira a 3600 rpm mueve
una cantidad de 2 M de aire por segundo, ese mismo ventilador al girarlo a
1800rpm mover una cantidad de aire de 1 M de aire por segundo, sin
importar que es lo que est haciendo girar el ventilador. Ahora este caudal que
es proporcional a la velocidad es impulsado a diferentes presiones segn
cambie la velocidad y la presin es un valor dado en fuerza aplicada por unidad
Proyecto de titulacin.
Pgina 69
Carrera Profesional de Electrotecnia Industrial.
de rea y se comporta de una manera cuadrtica conforme cambia la
velocidad:( rpm a ) (Rpm b) Utilizando el mismo caso anterior si suponemos
que la presin del aire impulsado a 3600 rpm tiene una presin de 1 kg-m2,
cuando est a 1800 rpm tendr una presin de 0.25 kg-m2, pues su
disminucin no es Ahora para realizar este trabajo nosotros necesitamos
determinada potencia para producir ese caudal concierta presin, ya sea que
nosotros realicemos ese trabajo por medios mecnicos o elctricos, la
demanda de potencia va ser la misma para procesos similares. Y la demanda
de esta potencia se va a comportar de una manera cbica.
En el caso anterior suponiendo que la potencia demandada para tener un
caudal Qa
de 2
M con
una
presin de
1kg- m es
de 10
kw; la
potencia necesaria para tener un caudal Qb de 1 M con una presin de 0.25
kg-m sera de 1.25 kW. Estas disminuciones de potencia demandada en una
relacin cuadrtica son las que nos permiten tener ahorros de energa en las
cargas de par variable a velocidades menores a las nominales; y los VFD son
los nicos equipos que nos pueden dar diferentes velocidades segn sean las
demandadas. En un sistema de manejo de fluidos no tendra ninguna ventaja
instalar Convertidor de Frecuencia Variable si las necesidades de caudal y
presin no tuvieran variaciones, y siempre se requiriesen las mximas
condiciones de trabajo; pero generalmente los sistemas de bombeo e inyeccin
de aire se disean originalmente considerando el punto mximo de operacin.
Todas las partes involucradas en el diseo como: tuberas, impulsores,
motores, vlvulas, tanques, tambin se encuentran diseados para abastecer
el volumen mximo requerido. Considerando lo anterior, y que la mayora de
los sistemas tienen variaciones de demanda, se requiere de un sistema de
control para regular continuamente el volumen del caudal de acuerdo a las
necesidades. Por lo general el promedio del caudal movido, puede ser una
fraccin de la capacidad mxima del sistema. El control de caudal se puede
regular de diferentes maneras usando algunos de los siguientes mtodos:
recirculacin, persianas, vlvula de estrangulacin, cajas de volumen variable,
control de arranque/paro y convertidores de frecuencia. Los mtodos que
implican poco ahorro de energa seran los de recirculacin y arranque/paro,
mientras que los mtodos de control de obturador o estrangulamiento, que son
Proyecto de titulacin.
Pgina 70
Carrera Profesional de Electrotecnia Industrial.
los ms usados pero su eficiencia es muy baja, la disminucin en los consumos
de energa es casi insignificante, pues el motor contina trabajando a su
velocidad
nominal
tratando
de
sobreponerse
las
contrapresiones
innecesarias. He aqu donde el VDF sustituye a cualquier tipo de control con
grandes ventajas; y es el nico que reduce la velocidad del equipo sin
necesidades de elementos mecnicos extras; los ahorros que se obtienen de la
operacin son mayores y pueden llegar al 60 %.
3.4.2. AHORRO DE ENERGA CON CARGAS DE PAR CONSTANTE.
Como se mencion anteriormente, en una aplicacin de par constante
tambin es factible ahorrar energa elctrica durante el arranque y la operacin,
siempre y cuando se tengan variaciones en la carga y/o el equipo no se
encuentre operando a su capacidad nominal. Pongamos el ejemplo de una
banda transportadora de material pesado. Las bandas siempre se dimensionan
para transportar la mxima capacidad a la que fue diseada, por lo tanto el
motor en determinadas ocasiones va trabajar sobrado pues no siempre va a
transportar la mxima carga, e inclusive sin carga pues no se les alimenta de
material regularmente; en esos momentos si la velocidad baja el consumo de
potencia va a disminuir conforme a lo solicitado por la carga. Una banda medio
cargada consume slo un poco menos de energa que una completamente
llena. Una banda parcialmente cargada puede consumir hasta el 80 % de la
energa necesaria para transportar la carga completa. Esta relacin se
empeora si la banda va vaca, pues consume del 50 al 70 % de la energa
requerida para la carga nominal, de tal forma que aunque no est realizando
ningn trabajo ni suministrando material hay consumo de energa y un
desperdicio del 50 % de la energa instalada. Con un VDF se logra ajustar
la velocidad de la banda al material disponible en un momento dado.
Regulando la velocidad en base al factor de carga. Vindolo de otra manera si
la cantidad del material por transportar disminuye a la mitad; la velocidad de
la banda disminuira a la mitad; y si la cantidad de material disminuye de tal
forma que la banda va vaca, la velocidad de la banda se reduce hasta un
mnimo con el correspondiente ahorro de energa.
Proyecto de titulacin.
Pgina 71
Carrera Profesional de Electrotecnia Industrial.
Graf. N34 Torque de un motor controlado por variador de frecuencia.
APLICACIN DE LA LEY CBICA.
En general en la industria, los procesos requieren de cierta flexibilidad ya que
no operan siempre a carga constante, sino que se deben satisfacer
necesidades variables dentro de un rango mximo y mnimo de flujos. Estos
flujos pueden ser: combustible, agua, materia prima, aire y otros fluidos. Como
medio de control de flujo se utilizan ampliamente las vlvulas de estrangulacin
o vlvulas de control cuyo principio de control se basa en provocar una cada
de presin mayor o menor del flujo a travs de ella. Un mtodo alternativo para
control de flujo es mediante la variacin de velocidad directamente en el
equipo, por ejemplo, en una bomba.
Proyecto de titulacin.
Pgina 72
Carrera Profesional de Electrotecnia Industrial.
CAPITUTLO VI
4.1.0. VARIADOR LS INDUSTRIAL.
Graf. N35 equipo variador lS industrial de un motor 1hp
Graf. N36 diagrama de bloques
4.1.1. VARIADOR DE FRECUENCIA IG5A, 220VAC, 1HP, 5A.
Estos variadores estn controlados por microprocesador y utilizan tecnologa
IGBT de ltima generacin. Esto los hace fiables y verstiles. Un mtodo
especial de modulacin por ancho de impulsos con frecuencia de pulsacin
seleccionable permite un funcionamiento silencioso del motor. Extensas
Proyecto de titulacin.
Pgina 73
Carrera Profesional de Electrotecnia Industrial.
funciones de seguridad ofrecen una proteccin excelente tanto del convertidor
como del motor.
4.1.2. CARACTERSTICAS DEL VARIADOR IG5A, 220VAC, 1HP, 5A.
Cdigo / Modelo de producto: SV008iG5A-2
Marca: LS Industrial Systems
Lnea: Variadores de Velocidad
Sub lnea: Variadores
APLICACIN: El variador iG5A es un variador multiprsito capaz de operar
prcticamente en
cualquier
aplicacin
de
1HP.
Algunas aplicaciones tpicas son las siguientes:
Cargas con torque de arranque variable:
Sistemas de bombeo a presin constante.
Aire acondicionado.
Puertas automticas.
Cargas con alto torque de arranque:
Tornillos transportadores.
Fajas transportadoras.
Gras puente.
Elevadores.
Molinos.
Mquinas herramienta
4.1.3. DATOS TCNICOS
Alimentacin: 200~230VAC(+10%,-15%)Trifsica
Potencia: 1HP
Capacidad de sobrecarga:
150% por 60 segundos
200% por 30 segundos
Mtodo de Control Configurable:
Escalar (Bombas y ventiladores).
Proyecto de titulacin.
Pgina 74
Carrera Profesional de Electrotecnia Industrial.
Vectorial (Cargas de alto torque).
Frecuencia:
Entrada: 50 - 60Hz, +/-5%.
Salida: 0 - 400Hz (portadora de 1-15kHz).
Temperatura de trabajo: -10C a 50C
Interfaz
de
usuario:
Panel frontal con controles de arranque/parada y potencimetro digital.
Entradas / Salidas:
8 entradas digitales (NPN PNP).
2 entradas analgicas configurables (-10 a +10VDC, 0 a 20mA).
2 salidas digitales (1 rel, 1 colector abierto).
1 salida analgica multifuncin 0-10VDC.
1 Salida de alimentacin de 24VDC.
a) FUNCIONES:
Arranque y parada suave.
Rampa controlada tipo S.
Reconocimiento automtico del motor (auto tuning).
Frenado dinmico.
Control de proceso PID avanzado.
JOG.
Cambio de giro.
Mltiples rampas de aceleracin.
Rearranque automtico.
Multivelocidades.
Arranque al vuelo.
Saltos de frecuencia.
Compensacin de deslizamiento.
Memorizacin de alarmas y estados.
Proyecto de titulacin.
Pgina 75
Carrera Profesional de Electrotecnia Industrial.
Autodiagnstico del variador.
Proteccin de parmetros mediante contrasea.
Amplificacin de torque.
Autodiagnstico.
Apagado/encendido automticos (Sleep y Wake).
Configuracin de segundo motor.
Conexionado de resistencia de frenado
b) PROTECCIONES:
Sobrevoltaje.
Bajo voltaje.
Sobrecorriente.
Falla a tierra.
Sobre temperatura (variador & motor).
Prdida de fase en entrada.
Prdida de fase en salida.
Sobrecarga.
Prevencin de atascamiento.
Error de comunicacin.
Prdida de frecuencia.
Falla de hardware.
Ventilacin OK.
Sobrecarga en condensadores (DC LINK),
Historial de fallas
c) VARIABLES DE MONITOREO:
Frecuencia de salida.
Corriente de salida.
Tensin de salida.
Proyecto de titulacin.
Pgina 76
Carrera Profesional de Electrotecnia Industrial.
Torque de salida.
RPM del motor.
Tensin del bus DC.
Potencia del motor.
Estado de entradas digitales.
Estado de salidas digitales.
d) COMUNICACIN:
Puerto RS485.
Protocolo ModBus RTU integrado.
e) DIMENSIONES:
70mm (Ancho) x 128mm (Alto) x 130mm (Prof.)
4.1.4. DISEO Y CONSTRUCCIN DEL MDULO DE VARIADOR DE
VELOCIDAD.
Para el diseo y construccin del mdulo de variador de velocidad, para los
motores asincrnicos jaula de ardilla trifsicos, se ha tomado en cuenta que,
debe ser o estar constituido de tal forma que facilite el aprendizaje e ilustre
claramente las partes ms importantes del tema en estudio, como tambin que
este se acople perfectamente a los mdulos que se encuentran en el
laboratorio de la carrera profesional de electrotecnia industrial , tomando en
cuenta las normas establecidas para la instalacin de los diferentes dispositivos
elctricoselectrnicos.
El diagrama de bloques de la estructura. Se establece un orden de
conexin de los dispositivos, los mismos que sern estudiados y
justificados el porqu de su utilizacin, por tal motivo se realiz un
diagrama de bloques que nos sirve de gua para la instalacin de los
equipos y su estudio.
Proyecto de titulacin.
Pgina 77
Carrera Profesional de Electrotecnia Industrial.
Fuente de alimentacin. El Laboratorio de electrnica, cuenta con
mdulos con su propia fuente de alimentacin de corriente alterna AC,
para nuestro fin utilizaremos 220V AC que ser necesario para poner en
funcionamiento el mdulo de variador de velocidad.
4.2.0. ANEXO.
4.2.1. CARACTERSTICAS TCNICAS DE MANUAL DEL VARIADOR DE
FRECUENCIAS.
Precauciones importantes del variador de frecuencias. Para verificar que
la unidad sea la correcta para la aplicacin deseada compruebe el tipo de
variador, el rgimen de salida en la placa de identificacin y que el variador
est intacto.
Proyecto de titulacin.
Pgina 78
Carrera Profesional de Electrotecnia Industrial.
4.2.2. PREPARACIN
DE
INSTRUMENTOS
PIEZAS
PARA
LA
OPERACIN.
Los instrumentos y las piezas a preparar dependen del modo en que se
operar el variador. Prepare el equipo y las piezas segn resulte necesario.
INSTALACIN.
Para operar el variador con elevado desempeo durante mucho tiempo
instlelo en un lugar apropiado, en la direccin correcta y con el despeje
adecuado.
CONEXIONADO.
Proyecto de titulacin.
Pgina 79
Carrera Profesional de Electrotecnia Industrial.
Conecte la fuente de alimentacin, el motor y las seales de operacin
(seales de control) a la bornera. Tenga en cuenta que una conexin incorrecta
puede daar el variador y los dispositivos perifricos.
PARTES DEL VARIADOR.
Apariencia fsica
Proyecto de titulacin.
Pgina 80
Carrera Profesional de Electrotecnia Industrial.
VISTA DEL INTERIOR DESPUES DE RETIRAR LA CUBIERTA
FRONTAL.
Proyecto de titulacin.
Pgina 81
Carrera Profesional de Electrotecnia Industrial.
4.2.3. CONEXIONADO DE LOS BORNES (ENTRADA/ SALIDA).
Proyecto de titulacin.
Pgina 82
Carrera Profesional de Electrotecnia Industrial.
CONEXIONADO DE LOS BORNES DE ALIMENTACION (0.4 a
7.5KW).
4.2.3. SELECCIN DE PNP/NPN Y CONECTOR PARA LA OPCION DE
COMUNICACIN.
Proyecto de titulacin.
Pgina 83
Carrera Profesional de Electrotecnia Industrial.
a) CUANDO SE USA VARIADOR INTERNO DE 24VCC (NPN).
b) CUANDO SE USA ALIMENTACION EXTERNA DE 24VCC
(PNP).
Proyecto de titulacin.
Pgina 84
Carrera Profesional de Electrotecnia Industrial.
INFORMACION BASICA
Proyecto de titulacin.
Pgina 85
Carrera Profesional de Electrotecnia Industrial.
4.2.4. TECLADO DE PROGRAMACION Y OPERACIN BASICA
CARACTERISTICAS DEL TECLADO.
TECLAS
VISOR
FWD
Encendido durante el avance
Prpadea cuando ocurre un
RUN
Comando de funcionamiento
REV
Encendido durante el retroceso fallo
STOP/RESET
STOP: Comando para detener el funcionamiento
RUN
Encendido
durante
el
RESET: Comando para reposicin cuando se produce un
funcionamiento
fallo
SET
Encendido durante la definicin
Subir
Permite desplazarse por los cdigos o aumentar el valor de un
de parmetros
parmetro
7 segmentos Muestran el estado de funcionamiento e informacin de los
Bajar
Permite desplazarse por los cdigos o reducir el valor de un
parmetros
parmetro
Izquierda
Permite saltar a otros grupos de parmetros o mover el cursor a
la izquierda para cambiar el valor de un parmetro
Derecha
Permite saltar a otros grupos de parmetros o mover el cursor a
la derecha para cambiar el valor de un parmetro
Intro
Permite definir el valor de un parmetro o guardar el valor
modificado del parmetro
Proyecto de titulacin.
Pgina 86
Carrera Profesional de Electrotecnia Industrial.
4.2.5. VISUALIZACION ALFANUMERICA EN EL TECLADO DE LED
4.2.6. DESPLAZAMIENTO A OTROS GRUPOS.
HAY CUATRO GRUPOS DE PARMETROS DIFERENTES EN EL
GRUPO SERIE SV-IG5A, MOSTRADOS A CONTINUACIN.
Proyecto de titulacin.
Pgina 87
Carrera Profesional de Electrotecnia Industrial.
Grupo
de Parmetros bsicos necesarios para que el variador
accionamiento
funcione. Pueden definirse parmetros como la frecuencia
de referencia y el tiempo de aceleracin/desaceleracin.
Grupo
de Parmetros de funciones bsicas para ajustar la frecuencia
funciones 1
Grupo
y la tensin de salida.
de Parmetros de funciones avanzadas para definir parmetros
funciones 2
como la operacin PID y la operacin de un segundo motor.
Grupo E/S
Parmetros necesarios para constituir una secuencia
(Entrada/Salida) usando los bornes de entrada/salida multifuncin.
EL DESPLAZAMIENTO A LOS OTROS GRUPOS DEPARMETROS.
Slo est disponible en el primer cdigo de cada grupo, como se
muestra en la siguiente figura.
Desplazamiento a los otros grupos usando la tecla Derecha ()
Desplazamiento a los otros grupos usando la tecla Izquierda ()
Proyecto de titulacin.
Pgina 88
Carrera Profesional de Electrotecnia Industrial.
La frecuencia de referencia se puede definirse 0.0 el primer cdigo del grupo
de accionamiento
El valor predefinido es 0.0, pero puede ser modificado
por el usuario. Se
visualizara la nueva frecuencia despus de haber sido modificada.
COMO DESPLAZARSE A LOS OTROS GRUPOS DESDE EL PRIMER
CDIGO DE CADA GRUPO.
Si usa la tecla con la flecha a la izquierda (t), los pasos anteriores se ejecutarn
en el orden inverso.
Proyecto de titulacin.
Pgina 89
Carrera Profesional de Electrotecnia Industrial.
COMO DESPLAZARSE A LOS OTROS GRUPOS DESDE
CUALQUIER CDIGO EXCEPTO EL PRIMERO.
Para desplazarse del cdigo F15 al grupo de funciones 2
4.3.0. COMO CAMBIAR CDIGOS EN UN GRUPO.
4.3.1. CAMBIO DE CDIGO EN EL GRUPO DE ACCIONAMIENTO.
Proyecto de titulacin.
Pgina 90
Carrera Profesional de Electrotecnia Industrial.
SALTO DE CDIGO Para desplazarse del cdigo F 0 al cdigo F15
directamente
El grupo de funciones 2 y el grupo E/ S se define con los mismos pasos.
4.3.2. NAVEGACIN POR LOS CDIGOS DENTRO DE UN GRUPO.
Para desplazarse del cdigo F 1 al cdigo F15 en el grupo de funciones 1
Proyecto de titulacin.
Pgina 91
Carrera Profesional de Electrotecnia Industrial.
Nota: Algunos cdigos sern salteados durante los incrementos (P) /
decrementos () para cambiar de cdigo. Esto se debe a que se
program dejar intencionalmente en blanco algunos cdigos para uso
futuro o a que los cdigos que el usuario no usa son invisibles.
Consulte detalles ms especficos en el Captulo 5.
Por
ejemplo,
cuando
el
cdigo
F24
[Seleccin
del
lmite
superior/inferior de frecuencia] est definido en "O (No)" no se
visualizan F25 [Lmite superior de frecuencia] ni F26 [Lmite inferior de
frecuencia] durante el cambio de cdigo. Pero cuando F24 est
definido en "1 (S)", F25 y F26 aparecen en el visor.
4.4.0. DEFINICION DE LOS PARAMETROS.
4.4.1 CAMBIO DE LOS VALORES DE PARMETROS EN EL GRUPO DE
ACCIONAMIENTO.
Para cambiar el tiempo ACC de 5.0 seg. A 16.0 seg.
En el paso 7, si pulsa las teclas Izquierda (t) o Derecha () mientras 16.0
Proyecto de titulacin.
Pgina 92
Carrera Profesional de Electrotecnia Industrial.
parpadea se inhabilitar la definicin del parmetro.
Nota 1) Si pulsa las teclas Izquierda (t) / Derecha () / Subir (P) / Bajar ()
mientras el cursor parpadea se cancelar el cambio del valor del
parmetro. Pulsando la tecla Intro () en este estado se ingresar el valor
en la memoria.
a) DEFINICIN DE LA FRECUENCIA.
Para cambiar la frecuencia de operacin a 30,05Hz en el grupo de
accionamiento
Proyecto de titulacin.
Pgina 93
Carrera Profesional de Electrotecnia Industrial.
El visor del SV-iG5A puede extenderse a 5 dgitos usando las teclas
Izquierda (t) / Derecha ().
La definicin de los parmetros se inhabilita pulsando cualquier otra tecla que
no sea Intro en el paso 7.
b) CAMBIO DE LOS VALORES DE PARMETROS EN EL GRUPO
E/S.
Para cambiar el valor del parmetro de F28 de 2 a 5
Proyecto de titulacin.
Pgina 94
Carrera Profesional de Electrotecnia Industrial.
La definicin anterior tambin se aplica para cambiar los parmetros en los
grupos de funciones 2 y E/S.
4.5.0. MONITOREO DEL ESTADO DE OPERACIN.
4.5.1 VISUALIZACIN DE LA CORRIENTE DE SALIDA.
Monitoreo de la corriente de salida en el grupo de accionamiento
Con este mismo mtodo pueden monitorearse otros parmetros en el grupo de
accionamiento, como dCL (Tensin de la conexin de CC del variador) o vOL
(Tensin de salida del variador).
Proyecto de titulacin.
Pgina 95
Carrera Profesional de Electrotecnia Industrial.
1) VISUALIZACION DE FALLOS
Como monitorear una condicin de fallo en el grupo de accionamiento
Proyecto de titulacin.
Pgina 96
Carrera Profesional de Electrotecnia Industrial.
2) INICIALIZACION DE LOS PARAMETROS
Como inicializar los parmetros de los cuatro grupos en H93
Proyecto de titulacin.
Pgina 97
Carrera Profesional de Electrotecnia Industrial.
4.5.2. DEFINICIN DE LA FRECUENCIA Y OPERACIN BSICA.
Las siguientes instrucciones asumen que todos los parmetros estn definidos
en los valores por defecto de fbrica. Los resultados podran ser distintos si los
valores fueron modificados. En tal caso inicialice (ver pgina 8-42) a los valores
por defecto de fbrica y siga las instrucciones.
Definicin de la frecuencia con el teclado y los bornes
4.5.3. DEFINICION DE LA FRECUENCIA CON EL POTENCIOMETRO
Proyecto de titulacin.
Pgina 98
Carrera Profesional de Electrotecnia Industrial.
Proyecto de titulacin.
Pgina 99
Carrera Profesional de Electrotecnia Industrial.
4.6.0. DEFINICION DE LA FRECUENCIA CON EL POTENCIOMETRO Y LA
TECLA RUN
Proyecto de titulacin.
Pgina 100
Carrera Profesional de Electrotecnia Industrial.
4.6.1. DIAGRAMA DE BLOQUES DE CONTROL.
Proyecto de titulacin.
Pgina 101
Carrera Profesional de Electrotecnia Industrial.
DEFINICION DE LA FRECUENCIA
Proyecto de titulacin.
Pgina 102
Carrera Profesional de Electrotecnia Industrial.
DEFINICION DEL COMANDO DE ACCIONAMIENTO
Proyecto de titulacin.
Pgina 103
Carrera Profesional de Electrotecnia Industrial.
ACELERACION/DESACELERACION Y CONTROL V/F
Proyecto de titulacin.
Pgina 104
Carrera Profesional de Electrotecnia Industrial.
4.6.2. FUNCIONES BSICAS.
MODO DE FRECUENCIA; Definicin 1 de la frecuencia desde el teclado
Grupo
Cdigo
Nombre
del Definicin Rango Inicial Unida
parmetro
Grupo
de 0.00
[Comando
accionamie
d
de -
0~400 0.00
Hz
frecuencia]
nto
Frq
[Modo de frecuencia] 0
0~8
Defina Frq - [Modo de frecuencia] en 0 {Definicin 1 de la frecuencia
desde el teclado}.
Defina la frecuencia deseada en 0.00 y pulse la tecla Intro () para entrar
el valor en la memoria.
El valor puede definirse en un valor inferior a F21 - [Frecuencia mxima
Cuando el teclado remoto est conectado, las teclas del teclado en la
carcasa se desactivan.
Definicin 2 de la frecuencia desde el teclado
Grupo
Cdigo
Grupo
de 0.00
accionamient
Nombre
del Definici Rango
parmetro
[Comando
de -
Inicial Unida
d
0~400
0.00
0~8
Hz
frecuencia]
o
Frq
[Modo de frecuencia] 1
Defina Frq - [Modo de frecuencia] en 1 {Definicin 2 de la frecuencia
con el teclado}.
Proyecto de titulacin.
Pgina 105
Carrera Profesional de Electrotecnia Industrial.
En 0.00, la frecuencia cambia al pulsar la tecla Subir (P) /
Bajar (). En este caso, las teclas Subir/Bajar sirven como
potencimetro.
El valor puede definirse en un ajuste inferior a F21 - [Frecuencia
mxima].
Cuando el teclado remoto est conectado, las teclas del teclado en la
carcasa se desactivan.
Definicin de la frecuencia con la entrada de V]
-10~+10
Grupo
Grupo
Cdig Nombre del parmetro
Definici Rango
de 0.00
Inicial
Unida
d
[Comando de frecuencia]
0~400
0.00
Hz
Frq
[Modo de frecuencia]
0~8
I2
[Tensin mnima de la -
0~-10
0.0
0~400
0.00
Hz
0~10
10.00
0~400
60.00
Hz
accionamie
nto
Grupo E/S
entrada NV]
I3
[Frecuencia
correspondiente a I2]
I4
[Tensin mxima de la entrada NV]
I5
[Frecuencia
correspondiente a I4]
I6~I10 [Entrada V1]
Defina Frq - [Modo de frecuencia] en 2.
La frecuencia definida puede monitorearse en 0.00 - [Comando de
frecuencia].
Proyecto de titulacin.
Pgina 106
Carrera Profesional de Electrotecnia Industrial.
o
Aplique la seal de -10V~+10V entre los bornes V1 y CM.
Frecuencia de salida correspondiente a -10V~+10V de tensin de entrada
al borne V1
Definicin de rango de entrada y frecuencia correspondiente a la
tensin de entrada V1 10V~0V
Ej.) Cuando la tensin de entrada (-) mnima es -2V con la
frecuencia correspondiente de 10Hz y la tensin mxima es 8V con la frecuencia de funcionamiento de 50Hz.
Proyecto de titulacin.
Pgina 107
Carrera Profesional de Electrotecnia Industrial.
Definicin de rango de entrada y frecuencia correspondiente a la
tensin de entrada V1 0~+10V
Ej.) Cuando la tensin de entrada (+) mnima es 2V con la
frecuencia correspondiente de 10Hz y la tensin mxima es
8V con la frecuencia de funcionamiento.
Proyecto de titulacin.
Pgina 108
Carrera Profesional de Electrotecnia Industrial.
CONCLUSIONES.
Los motores que durante dcadas las industrias estaban ocupando son
los motores de corriente continua. Sin embargo los motores con menor
nivel de exigencias en el mantenimiento son los motores asncronos de
jaula de ardilla, debido a que carecen de colector, tienen una relacin
peso-potencia mucho menor que los de continua, y por tanto un costo
significativamente ms bajo. Por esta razn pasaron a ser los ms
utilizados en procesos industriales.
En la actualidad la demanda de controles elctricos industriales
automatizados empleando la electrnica de potencia ha ido aumentando
progresivamente, la capacitacin de los tcnicos debe cambiar de
acuerdo a la tecnologa, para brindar un desarrollo complementario a la
preparacin acadmica impartida.
El control de velocidad de un motor se realiza mediante el cambio de
frecuencia que realiza el VFD, es decir el variador de velocidad recibe
una tensin trifsica a una frecuencia fija y a su salida se obtiene una
tensin trifsica a una frecuencia variable. La configuracin ms usada
es: rectificador de onda completa o de Graetzinversor.
Con la realizacin del mdulo aplicado a la industria el estudiante cuenta
con una gua para manejar el VFD y as tendr una visin clara de
posibles aplicaciones con esos dispositivos, pudiendo ahorrar tiempo en
el desarrollo de dichas aplicaciones.
El variador de velocidad LG iG5 controla los motores asncronos
incluyendo el motor de induccin tipo "jaula de ardilla" que es el motor
ms econmico, simple y robusto que hay y se distingue por ser el ms
usado en la industria por estas ventajas. Es el nico control que
energiza, protege y permite la variacin de la velocidad en el motor, sin
ningn accesorio extra entre el motor y la carga.
Uno de los dispositivos ms sofisticados que cuenta el mercado actual
es el variador de velocidad LG iG5 ya que brinda mltiples funciones en
su programacin, las cuales pueden ser la solucin a diferentes
problemas que se presenten en aplicaciones que usen motores.
El variador de velocidad LG iG5 es flexible en cuanto a su alimentacin
ya que puede trabajar con una red monofsica o trifsica, y esta es una
caracterstica muy importante dentro de una industria.
Proyecto de titulacin.
Pgina 109
Carrera Profesional de Electrotecnia Industrial.
El VFD ha llegado a reemplazar a contactores, rels, arrancadores,
temporizadores y circuitos de proteccin, puesto que cumple con todas
stas funciones y an ms los parmetros de estas funciones son
programables.
Proyecto de titulacin.
Pgina 110
Carrera Profesional de Electrotecnia Industrial.
RECOMENDACIONES.
La principal y ms importante recomendacin que nos indica el
fabricante del Variador de Velocidad LG iG5 es que se debe tener
cuidado de no conectar las terminales de alimentacin (R, S, T) a las
terminales de salida del variador (U, V, W), ya que esta es la principal
causa de daos en estos equipos.
Para una correcta seleccin de un variador de velocidad dentro de un
proceso se debe tomar en cuenta tanto las caractersticas del motor que
se va a utilizar como el funcionamiento del proceso.
Para la instalacin de un variador de frecuencia es necesario conocer
tanto los elementos que se va a disponer para la automatizacin de un
proceso como el funcionamiento de la planta.
Manipular el equipo por personal familiarizado con la puesta en servicio
y operacin para asegurar el funcionamiento correcto del equipo.
Esperar cinco minutos para permitir que se descarguen los
condensadores antes de comenzar cualquier trabajo de instalacin en el
equipo.
Tomar en cuenta que la conexin de los cables de red, del motor y de
mando o control deber realizarse de la forma correcta a fin de evitar
que interferencias de tipo inductivo y capacitivo afecten al correcto
funcionamiento del variador.
Montar en posicin frontal-vertical para asegurar la refrigeracin
necesaria asegurando que las aletas de enfriamiento del convertidor no
estn tapadas ni obstruidas.
Observar que el convertidor est siempre a tierra. Si el convertidor no
est puesto a tierra correctamente se puede destruir el convertidor, as
como producirse altas tensiones peligrosas para las personas. Lo mismo
rige si el convertidor trabaja en redes no puestas a tierra.
Antes de realizar o cambiar conexiones en el mdulo, se debe
desconectar la fuente de alimentacin del equipo.
Proyecto de titulacin.
Pgina 111
Carrera Profesional de Electrotecnia Industrial.
REFERENCIAS BIBLIOGRAFICAS
CHAPMAN, Stephen J.: Maquinas elctricas. Segunda edicin. Mxico,
DF. McGraw-Hill Interamericana de Mxico, S.A. de C.V., 1995.
NASAR UNNEWEHR, Electromecnica y Mquinas Elctricas, tomo 1,4
Editorial Limusa de Mxico, 1997
ENRQUEZ, Gilberto Harper: Control de Motores Elctricos. Primera
Edicin. Mxico, DF. Limusa S.A. de C.V. Grupo Noriega Editores, 1998.
ENRQUEZ, Gilberto Harper: Manual de Electricidad Industrial II,
Reparacin de motores elctricos. Tomo 2. Mxico, DF. Limusa S.A. de
C.V., 1996.
KOSOW, Irving, Mquinas Elctricas y Transformadores, Segunda
edicin, Editorial Prentice Hall Mxico, 1993.
LOBOSCO, Orlando S. y DAZ Jos Luiz P.C.: Seleccin y Aplicacin de
Motores
Elctricos.
Volumen
1.
Barcelona,
Espaa.
Siemens
Aktiengesellschaft Marcombo S.A., 1990.
SMEATON, Robert W.: Motores Elctricos, Seleccin, Mantenimiento y
Reparacin. Segunda Edicin (Primera Edicin en Espaol). Tomo III.
McGraw-Hill Interamericana Editores, S.A. de C.V.
TIPPENS, Paul E.: Fsica, Conceptos y Aplicaciones. Sexta Edicin.
Mxico, DF. McGraw-Hill Interamericana Editores, S.A. de C.V., 2001.
Proyecto de titulacin.
Pgina 112
Carrera Profesional de Electrotecnia Industrial.
REFERENCIAS BIBLIOGRAFICAS PAGINAS WEB
http://www.angelfire.com/sk3/todoarchivos0/archivos/Eficiencia
en
Motores electricos.p df, Ing. Cip Eduardo Tiravanti. Eficiencia Energtica
En Motores Elctricos
http://www.ersp.gob.pa/electric/info clientes/Motores.pdf, Gua Para La
Proteccin De Motores Elctricos.
http://www.fulp.ulpgc.es/articulos/vector22 01.pdf, Unin Elctrica De
Canarias, S.A. Anlisis De Los Motores Elctricos
http://usuarios.lycos.es/mugresoft/caracteristicas
particulares.htm,
Carnegie Mellon University. Variadores De Velocidad.
http://members.tripod.com/JaimeVp/Electricidad/Arranque
de
motores.htm. Arranque De Motores
http://www.dliengineering.com/vibman-spanish/motoresainduccin.htm,
DLI Watchman. Motores a Induccin
http://www.dliengineering.com/vibmanspanish/motoreselctricosacorrientealternaca.htm,
DLI
Watchman.
Motores Elctricos a Corriente Alterna
http://www.carbi.net/tecnica/newpage14.html,
Alfonso
Perales.
VARIADORES ELECTRNICOS
http://www.calormatica.cl/sumi001.htm, Calormtica Ltda. Calor y
Automatizacin. Suministros y Componentes
http://www.astrogea.org/alasala/variador.htm, AstroGea. Caractersticas
Tcnicas Del Variador De Frecuencia Programable
Proyecto de titulacin.
Pgina 113
Carrera Profesional de Electrotecnia Industrial.
ANEXOS
Armado de tablero fuerza y control
Vista frontal del variador LS IG5A
Proyecto de titulacin.
Conexiones de entrada y salida
Pgina 114
Carrera Profesional de Electrotecnia Industrial.
Partes del variador LS IG5A
circuito de fuerza y entradas auxiliares
Bloque de tarjeta etapa de potencia
Algunos tipos de variadores LS Industrial
Proyecto de titulacin.
Pgina 115
Carrera Profesional de Electrotecnia Industrial.
Circuito equivalente
Transistor IGBT
Funcionamiento del transistor IGBT
Proyecto de titulacin.
Pgina 116
Carrera Profesional de Electrotecnia Industrial.
INSTITUTO DE EDUCACION SUPERIOR
TECNOLOGICO PBLICO TUPAC AMARU
R.M. N 131-83-ED
CARRERA PROFESIONAL DE ELECTROTECNIA INDUSTRIAL
TEMA
Diseo y construccin de un mdulo para
control de un motor trifsico de 1HP,
mediante variador de frecuencia.
PARA OPTAR EL TTULO DE PROFESIONAL TCNICO EN
ELECTROTCNIA INDUSTRIAL
REALIZADO POR: Vctor Ral Romero Hacho
Rolando Quispe Lizaraso
ASESOR: LIC. Tomas Barrientos Saihua
JEFE DE AREA ACADEMICA: Lic. Cristbal Cahuina Uapillco
Cusco-Per
2016
Proyecto de titulacin.
Pgina 1
Carrera Profesional de Electrotecnia Industrial.
PRESENTACIN
Seor Director del Instituto de educacin Superior Tecnolgico Pblico TPAC
AMARU del Cusco ECON.LIZANDRO AMPUERO CASQUINO, Seor jefe del
rea
Acadmico
de
Electrotecnia
Industrial,
CRISTOBAL
CAHUINA
UAPILLCO, docentes del rea Acadmica y estudiantes; en cumplimiento del
reglamento de examen terico prctico, y con la finalidad de optar al ttulo de
profesional Tcnico en Electrotecnia Industrial, los estudiantes egresados de la
carrera presentan el tema de grado: DISEO
Y CONSTRUCCIN DE
UN MDULO PARA CONTROL DE UN MOTOR TRIFSICO DE
1HP, MEDIANTE VARIADOR DE FRECUENCIA
Con el propsito
de aportar a la investigacin, actualizacin, implementacin de nuestro
laboratorio de nuestra carrera de la institucin, nosotros los estudiantes con la
finalidad de explorar el mundo del control de motores mediante variadores,
ponemos nuestro trabajo para su respectiva evaluacin por su despacho.
Esperamos que el presente trabajo de proyecto llene expectativas de los
docentes y alumnos, pongo en agradecimiento anticipadamente su esmero,
esfuerzo y dedicacin para nosotros, como tambin esperamos que sirva de
inicio para que los futuros profesionales usen este pequeo aporte en su
formacin profesional.
Proyecto de titulacin.
Pgina 2
Carrera Profesional de Electrotecnia Industrial.
AGRADECIMIENTO
Agradecemos a Dios por darnos la vida y as llegar a culminar nuestros
estudios profesionales en electrotecnia industrial
Queremos expresarnos en primer lugar con un profundo agradecimiento a
nuestros padres, quienes en su condicin de padre principal, supo guiarnos y
brindarnos su apoyo; durante nuestra formacin profesional en bien de sus
hijos nos inculcaron hacer profesionales, lo cual plasmamos en el presente
trabajo.
Deseamos tambin extender nuestro agradecimiento a todos nuestros
docentes de la carrera profesional
de Electrotecnia Industrial. Y a nuestro
asesor quien supo guiarnos con sus conocimientos para que el presente
trabajo sea una realidad, pero sobre todo queremos agradecer por su
constante aliento, estmulo y apoyo desinteresadamente prestado durante este
presente proyecto.
Con mucho anhelo agradecemos a la institucin superior tecnolgico pblico
TUPAC AMARU cusco, por darnos ese acogimiento y brindarnos la educacin
cotidiana durante los tres aos que estuvimos en esta institucin pblica.
Proyecto de titulacin.
Pgina 3
Carrera Profesional de Electrotecnia Industrial.
INTRODUCCIN
El presente trabajo nos da a conocer de qu manera lo vamos a desarrollar el
presente proyecto en base a diferentes criterios de anlisis que permitan
evaluarlo.
Ya que la ciencia y la tecnologa estn al avance cada da, es por eso que nos
dedicamos a realizar y dar la aplicacin de
un mdulo para control de
un motor trifsico de 1HP, mediante variador de frecuencia,
con el fin de ampliar nuestros conocimientos en el control de un motor
mediante variador de frecuencias.
Para desarrollar el diseo del proyecto contamos con las herramientas
matemticas, elctricas y econmicas. En el campo de la Electrotecnia
Industrial ya que es una parte fundamental para el desarrollo tecnolgico de la
institucin y tanto para el alumnado.
Finalmente, el presente proyecto coadyuvar al desarrollo acadmico prcticoexperimental de los estudiantes de las carreras profesionales de Electrotecnia
Industrial y Electrnica Industrial, pues contarn con un mdulo didctico para
desarrollar distintas pruebas y poder analizar las caractersticas operativas, de
funcionamiento y control de un motor.
Proyecto de titulacin.
Pgina 4
Carrera Profesional de Electrotecnia Industrial.
DEDICATORIAS
Dedico este trabajo de
proyecto a mi madre y a
mis hermanos, por ser
partcipes cotidianos en m
logro profesional
Vctor Ral Romero Hacho
Dedico este proyecto a
mis padres Y familiares,
que siempre han estado
apoyndome, dndome la
fortaleza para el bien; a
nuestro apreciados
docentes, a mis
compaeros y amigos.
Rolando Quispe Lizaraso
Proyecto de titulacin.
Pgina 5
Carrera Profesional de Electrotecnia Industrial.
INDICE
PRESENTACIN.....2
AGRADECIMIENTO.....3
INTRODUCCI.........4
DEDICATORIAS.................................................................................................5
INDICE.....................................6
RESUMEN DEL PROYECTO.......11
CAPITULO I
1. ANTECEDENTES DE LA PROBLEMTICA.12
1.1. ASPECTOS INSTITUCIONALES12
1.2.
DESCRIPCION DEL PROBLEMA..13
1.3.
FORMULACION DEL PROBLEMA....15
1.4.
JUSTIFICACION15
1.5.
OBJETIVOS16
1.5.1. OBJETIVOS GENERAL..16
1.5.2. OBJETIVOS ESPECIFICOS16
1.6.
HIPTESIS....17
1.7.
VARIABLES DEL TEMA DE INVESTIGACION..17
1.7.1. VARIABLE INDEPENDIENTE:.17
1.7.2. VARIABLE DEPENDIENTE:..17
1.8.
ALCANCE..18
1.9.
UNIVERSO.18
1.10. MUESTRA..18
1.11. CRONOGRAMA DE ACTIVIDADES.19
Proyecto de titulacin.
Pgina 6
Carrera Profesional de Electrotecnia Industrial.
CAPITULO II
2.0. MARCO TERICO.15
2.1. INTERRUPTOR TERMOMAGNETICO....15
2.1.2. FUNCIONAMIENTO DEL TERMO MAGNTICO..15
2.1.3. PARTES DE UN INETERRUPTOR TERMOMAGNETICO...16
2.1.4. CARACTERSTICAS DEL INTERRUPTOR TERMO MAGNTICO...17
2.1.5. VENTAJAS DE TERMO MAGNTICOS.18
2.2.0. EL CONTACTOR....18
2.2.1 FUNCIONAMIENTO Y PARTES DEL CONTACTOR.....19
2.2.2. VENTAJAS DEL USO DEL CONTACTOR.21
2.2.3. ELECCIN DEL CONTACTOR.22
2.2.4. APLICACIN DE LOS CONTACTORES...23
2.3.0. RELE TERMICO...23
2.3.1 PRINCIPIOS DE FUNCIONAMIENTO DE UN RELE..24
2.3.2 FUNCIONAMIENTO DE UN RELE TERMICO.25
2.4.0 MOTOR ELCTRICO. .25
2.4.1. PARTES FUNDAMENTALES DE UN MOTOR ELCTRICO......26
2.4.2. MOTOR ASINCRNICO DE ROTOR BOBINADO....28
2.4.3. MOTORES ASINCRNICOS, JAULA DE ARDILLA....28
2.4.4. CLASIFICACIN DE LOS MOTORES DE CORRIENTE ALTERNA.30
2.4.5. POR EL TIPO DE ROTOR.....31
2.4.6. POR SU NMERO DE FASES DE ALIMENTACIN...32
2.4.7. CARACTERSTICA DE FUNCIONAMIENTO DEL MOTOR DE
INDUCCIN.....33
2.4.8. ARRANQUE DE UN MOTOR TRIFSICO DE INDUCCIN......34
2.4.9. FUNDAMENTOS BSICOS SOBRE EL CONTROL DE
Proyecto de titulacin.
Pgina 7
Carrera Profesional de Electrotecnia Industrial.
VELOCIDAD DE UN MOTOR TRIFSICO DE INDUCCIN...35
2.4.10. FORMAS DE CONTROL DE VELOCIDAD DE UN MOTOR
TRIFSICO DE INDUCCIN...35
2.4.11. CONTROL DE VELOCIDAD MEDIANTE EL CAMBIO EN LA
FRECUENCIA DE ALIMENTACIN....35
CAPITULO III
3.0. VARIADOR DE VELOCIDAD...36
3.1 CONTROLADOR DE VELOCIDAD..36
3.1.2. MOTIVOS PARA EMPLEAR VARIADORES DE VELOCIDAD...38
3.1.3. FOMENTAR EL AHORRO DE ENERGA MEDIANTE EL USO DE
VARIADORES DE VELOCIDAD..39
3.1.4. TIPOS DE VARIADORES DE VELOCIDAD......39
3.1.5. VARIADORES MECNICOS...40
3.1.6. VARIADORES HIDRULICOS....40
3.2.0. VARIADORES ELCTRICO-ELECTRNICOS45
3.2.1. TIPOS DE VARIADORES ELCTRICO-ELECTRNICOS....45
3.2.2. VARIADORES PARA MOTORES DE CC...46
3.2.3. VARIADORES POR CORRIENTES DE EDDY..47
3.2.4. VARIADORES DE DESLIZAMIENTO....47
3.2.5. VARIADORES PARA MOTORES DE CA..48
3.3.0. VARIADOR DE FRECUENCIA.49
3.3.1. PARTES DEL VARIADOR DE FRECUENCIA..51
3.3.2. TIPOS DE VARIADORES DE FRECUENCIA....53
3.3.3. VARIADOR TIPO MODULACIN DEL ANCHO DEL PULSO (PWM)..53
3.3.4. VARIADORES TIPO FLUJO VECTORIAL.....55
Proyecto de titulacin.
Pgina 8
Carrera Profesional de Electrotecnia Industrial.
3.3.5 VARIADORES DE FRECUENCIA QUE NO PRODUCEN ARMNICA..57
3.3.6. APLICACIONES INDUSTRIALES DE LOS VARIADORES DE
FRECUENCIA...58
3.3.7. ELEMENTOS DE PROTECCIN Y MONITOREO.............................60
3.3.8. ESTRUCTURA Y COMPONENTES DE LOS VARIADORES
ELECTRNICOS....60
3.3.9. TIPOS DE CARGAS...62
3.4.0. AHORRO DE ENERGA CON VARIADORES DE FRECUENCIA.65
3.4.1 AHORRO DE ENERGA EN CARGAS DE PAR VARIABLE..65
3.4.2. AHORRO DE ENERGA CON CARGAS DE PAR CONSTANTE...67
CAPITUTLO VI
4.1.0. VARIADOR LS INDUSTRIAL.69
4.1.1. VARIADOR DE FRECUENCIA IG5A, 220VAC, 1HP, 5A.....69
4.1.2. CARACTERSTICAS DEL VARIADOR IG5A, 220VAC, 1HP, 570
4.1.3. DATOS TCNICOS.........70
4.1.4. DISEO Y CONSTRUCCIN DEL MDULO DE VARIADOR DE
VELOCIDAD.73
4.2.0. ANEXO. .74
4.2.1. CARACTERSTICAS TCNICAS DE MANUAL DEL VARIADOR DE
FRECUENCIAS.......74
4.2.2. PREPARACIN DE INSTRUMENTOS Y PIEZAS PARA LA
OPERACIN.....75
4.2.3. CONEXIONADO DE LOS BORNES (ENTRADA/ SALIDA).78
4.2.4. SELECCIN DE PNP/NPN Y CONECTOR PARA LA OPCION DE
COMUNICACIN79
Proyecto de titulacin.
Pgina 9
Carrera Profesional de Electrotecnia Industrial.
4.2.5. TECLADO DE PROGRAMACION Y OPERACIN BASICA
CARACTERISTICAS..82
4.2.6. VISUALIZACION ALFANUMERICA EN EL TECLADO DE LED...83
4.2.7. DESPLAZAMIENTO A OTROS GRUPOS.....84
4.3.0. COMO CAMBIAR CDIGOS EN UN GRUPO..87
4.3.1. CAMBIO DE CDIGO EN EL GRUPO DE ACCIONAMIENTO.....87
4.3.2. NAVEGACIN POR LOS CDIGOS DENTRO DE UN GRUPO.88
4.4.0. DEFINICION DE LOS PARAMETROS.......89
4.4.1. CAMBIO DE LOS VALORES DE PARMETROS EN EL GRUPO DE
ACCIONAMIENTO...89
4.5.0. MONITOREO DEL ESTADO DE OPERACIN.92
4.5.1. VISUALIZACIN DE LA CORRIENTE DE SALIDA.....92
4.5.2. DEFINICIN DE LA FRECUENCIA Y OPERACIN BSICA...95
4.5.3. DEFINICION DE LA FRECUENCIA CON EL POTENCIOMETRO.96
4.6.0. DEFINICION DE LA FRECUENCIA CON EL POTENCIOMETRO Y LA
TECLA RUN..97
4.6.1. DIAGRAMA DE BLOQUES DE CONTROL98
4.6.2. FUNCIONES BSICAS....102
4.7.1. CONCLUSIONES...105
4.7.2. RECOMENDACIONES..106
4.8.0. BIBLIOGRAFA.110
Proyecto de titulacin.
Pgina 10
Carrera Profesional de Electrotecnia Industrial.
RESUMEN DEL PROYECTO
El presente proyecto Diseo y construccin de un mdulo para control de
un
motor trifsico de 1HP, mediante variador de frecuencia. est
destinado para ser utilizado en las unidades didcticas del mdulo profesional
III, Automatizacin de Sistema Elctricos Industriales, en la Carrera Profesional
de Electrotecnia Industrial del Instituto de educacin Superior Tecnolgico
Pblico Tpac Amaru
El proyecto tiene como propsito variar la velocidad de un motor 1HP mediante
variacin de frecuencias
suministra una tensin alterna cuyo valor es
regulable, al mismo tiempo que tambin es posible regular la frecuencia de
alimentacin al motor y invertir sentido de giro, de este modo es posible
conseguir un control de velocidad muy efectiva, que permite incluso llevar un
motor a una velocidad de sincronismo superior a la nominal. La razn de variar
a la vez frecuencia y tensin radica en el hecho de conseguir un par constante
en todo rgimen de la velocidad del motor.
Proyecto de titulacin.
Pgina 11
Carrera Profesional de Electrotecnia Industrial.
CAPITULO I
2. ANTECEDENTES DE LA PROBLEMTICA
1.12. ASPECTOS INSTITUCIONALES
Razn social
: IEST Pblico Tpac Amaru
Dispositivos de automatizacin: R.M-131-83-ED
Dispositivo de Revalidacin
: R.D.N 067-2005-ED
Director
: Econ. Lizandro R. Ampuero Casquino
Direccin
: Avenida Cusco N 496
Distrito
: San Sebastin
Provincia
: Cusco
Depto.
: Cusco
Telfonos
: 084-270759,084-273866
Fax
: 084-270315
: tamaru@hotmail.com
Pgina WEB
: WWW.ISTTA.NET
EL
R.M N 0418-75-ED
IEST
es creado con
originalmente como
Escuela Superior de Educacin Profesional ESEP al amparo de la Ley
General
de Educacin
N 19326, la Escuela Superior de Educacin
Profesional Tpac Amaru inicia sus actividades acadmicas el 21 de
abril de 1975, con las especialidades
de: Agropecuaria, Contabilidad,
Electricidad, Mecnica de Produccin, Minera y Salud Oral. En el ao de
1987 se autoriza el funcionamiento de la ESEP II, el acceso es con
Proyecto de titulacin.
Pgina 12
Carrera Profesional de Electrotecnia Industrial.
educacin secundaria Completa y previo examen de concurso pblico.
Desde el ao 1983, con la Ley General de Educacin N 23384 funciona
como Instituto
Superior tecnolgico
Tpac Amaru con las Carreras
Profesionales de: Contabilidad, Electricidad, Electrnica,
Mecnica
Automotriz, Mecnica de Produccin, Tcnicas en Laboratorio Clnico,
Gua Oficial de Turismo y
Administracin de Servicio
Creados por R.M. N 131-83-ED, luego se crearon
en Hostelera,
las carreras de
Computacin e Informtica y Enfermera Tcnica.
El IEST pblico Tpac Amaru del Cusco tuvo convenios con las
Repblicas de Hungra, Holanda, Alemania, Japn y ahora con Corea,
productos de estos convenios
se ha
implementado con mquinas,
instrumentos, herramientas y equipos instructivos para cada una de las
dos carreras, adems hubo la implementacin tcnico pedaggico al
personal docente. En los ltimos aos se ha recibido ayuda del Proyecto
CIPCYT, AECI, Unin
Europea, el BID
del Programa
de Formacin
Profesional Tecnolgica y Pedaggico en el Per (FORTE-PE), habiendo
iniciado
con el modelo de Sistema
Modular con las Carreras
Profesionales de: Administracin de Servicios en Hotelera, gua Oficial
de
Turismo,
Electrotecnia
Industrial,
Mecnica
de
Produccin
Enfermera. En la actualidad del IEST Pblico Tpac Amaru aplica la
formacin profesional basado en el enfoque por competencias en sus
diez carreras profesionales.
1.2.
DESCRIPCION DEL PROBLEMA.
La funcin primordial del variador de frecuencia es evitar la presencia de altos
niveles de energa elctrica y de carga reactiva en las redes elctricas que
impiden que se trasmita toda la potencia activa para la cual esta dimensionada,
lo que es motivo de preocupacin permanente tanto para las empresas que
distribuyen la energa y las industrias en general debido a que se logra un
ahorro considerable de dicha energa.
Proyecto de titulacin.
Pgina 13
Carrera Profesional de Electrotecnia Industrial.
Dentro de una industria, al no contar con un variador de frecuencia, produce los
siguientes inconvenientes.
Aumento de la intensidad de la corriente.
Prdidas en los conductores y fuertes cadas de tensin
Incrementos de potencia de las plantas, transformadores, reduccin de su vida
til y reduccin de la capacidad de conduccin de los conductores.
La temperatura de los conductores aumenta y esto reduce la vida de su
aislamiento
Aumento en sus factores por tener un bajo factor de potencia.
Durante los periodos en los que la demanda de energa es mayor, es
cuando toda la capacidad de la red elctrica se utiliza, en el caso de una
industria a mayor productividad, lo que lleva asociado necesariamente a una
mayor demanda de energa reactiva.
La seleccin y aplicacin de los variadores de frecuencia en el control de
velocidad de motores elctricos, implica el conocimiento de algunos conceptos
bsicos, para de esa manera poder usar toda la tecnologa existente en el
mercado y de esta poder atacar dicho problema que va en aumento este
trabajo su principal funcin es dar a conocer los mtodos ms comunes.
Como punto de vista muy particular se pretende atacar las necesidades que las
reas de automatizacin y control requieren en la actualidad, as como los
retos que podran surgir en un futuro dentro de la industria en general.
EL Instituto de Educacin Superior Tecnolgico Pblico Tpac Amaru
del Cusco-Carrera profesional de Electrotecnia Industrial aun todava
est en falencia con respecto al equipamiento de equipos de
automatizacin, para brindar una formacin profesional actualizada en
beneficio de los estudiantes de la carrera, reflejando a lo siguiente:
En la carrera profesional No se cuenta con tablero DISEO Y
CCONSTRUCCION DE UN MODULO PARA CONTROL DE UN
MOTOR
TRIFSICO
DE
HP,
MEDIANTE
VARIADOR
DE
FRECUENCIA.
Proyecto de titulacin.
Pgina 14
Carrera Profesional de Electrotecnia Industrial.
Habiendo detectado esta situacin problemtica en nuestra Institucin
especficamente en la Carrera Profesional de Electrotecnia Industrial;
presentamos el presente proyecto de Investigacin Tecnolgica
que
beneficiar a los estudiantes y pblico en general que se relacionen a
nuestra institucin.
1.3.
FORMULACION DEL PROBLEMA.
Por qu no se cuenta con tableros de control automtico de motores
trifsicos con variador de velocidad, actualizados en la carrera
profesional de Electrotecnia Industrial?
1.4.
JUSTIFICACION.
El estudio de aquellas industrias que son indispensables para satisfacer
las necesidades primordiales de una sociedad es de suma importancia
ya que de ellas depende en gran parte el desarrollo econmico de
nuestro pas, a estas se les da el nombre de industrias bsicas.
Entre las industrias bsicas existen necesidades relevantes para su
desarrollo, una de ellas es el de variar la velocidad, en los motores de
corriente alterna, ya que ocasionan un ahorro de energa, para esto es
necesario tener conocimiento sobre los criterios tcnicos, as como de
los procedimientos ms comnmente empleados.
Tambin es vital el tener conocimiento de los procedimientos adecuados
de operacin, control y proteccin de los motores elctricos los cuales
satisfacen las demandas en sus diferentes modalidades dentro de la
industria en general, de esta manera un solo operador puede controlar
fcilmente todo un conjunto de ellos.
El desarrollo de este tema es de gran importancia ya que se busca la
operacin eficiente del sistema elctrico desde el ms pequeo hasta el
ms grande, dentro de una instalacin industrial automatizada.
Proyecto de titulacin.
Pgina 15
Carrera Profesional de Electrotecnia Industrial.
El propsito de este trabajo es generar la informacin bsica necesaria
que permita auxiliar a los estudiantes, profesionales tecnicos que se
desempeen dentro de las actividades relacionadas con el diseo,
construccin, operacin y mantenimiento de plantas industriales y
construccin en general, ya que deben de tener un amplio conocimiento
acerca de los variadores de velocidad, para el mejor desempeo de su
actividad.
1.5.
OBJETIVOS.
1.5.1. OBJETIVOS GENERAL.
Implementar el mdulo de DISEO Y CONSTRUCCIN DE UN
MDULO PARA CONTROL DE UN MOTOR TRIFSICO DE 1HP,
MEDIANTE
VARIADOR
DE
FRECUENCIAS
(VARIACIN
DE
FRECUENCIA PROGRAMABLE), Para la carrera profesional de
Electrotecnia Industrial y sustentar el examen terico-prctico, para fines
de titulacin.
1.5.2. OBJETIVOS ESPECIFICOS.
Investigar las principales aplicaciones de los variadores de frecuencia
o velocidad en la industria.
Realizar los distintos tipos de arranque del motor de induccin y
determinar las ventajas del arranque con variador respecto a los
dems mtodos.
Indicar de una manera prctica y sencilla el control de velocidad de
los motores asncronos.
Realizar pruebas y verificar el buen funcionamiento del mdulo
didctico.
Explicar los conceptos de fuerza, par, velocidad angular, aceleracin
e inercia.
Disear y construir un mdulo para control de un motor trifsico de
1hp, mediante variador de frecuencia con todos los elementos que lo
componen.
Proyecto de titulacin.
Pgina 16
Carrera Profesional de Electrotecnia Industrial.
1.6.
HIPTESIS.
Si se disea en forma eficiente y luego se construye correctamente el
modulo: DISEO Y CONSTRUCCIN DE UN MDULO PARA
CONTROL DE UN MOTOR TRIFSICO DE 1HP, MEDIANTE
VARIADOR DE FRECUENCIAS (VARIACIN DE FRECUENCIA
PROGRAMABLE), para el laboratorio de la Carrera Profesional
Electrotecnia Industrial; entonces, se lograrn realizar
de
la formacin
integral (terico-prctico) aplicados al automatismo industrial, para
alcanzar las competencias y capacidades profesionales en los
estudiante de la Carrera profesional de Electrotecnia Industrial del
Instituto de Educacin Superior Tecnolgico TUPAC AMARU.
1.7.
VARIABLES DEL TEMA DE INVESTIGACION.
De acuerdo al tema de investigacin, se ha considerado los siguientes
variables:
1.7.1. VARIABLE INDEPENDIENTE:
DISEO Y CONSTRUCCIN DE UN MDULO PARA CONTROL DE
UN MOTOR TRIFSICO DE 1HP, MEDIANTE VARIADOR DE
FRECUENCIAS (VARIACIN DE FRECUENCIA PROGRAMABLE)
1.7.2. VARIABLE DEPENDIENTE:
Es el actual laboratorio de Electrotecnia Industrial con deficiencia tcnica
y que haciendo el diseo y construccin del mdulo educativo se podr
cambiar esa realidad deficiente.
1.7.3. VARIABLES INTERVENIENTES:
Estudiantes de Electrotecnia Industrial.
Docentes.
Jefe del rea Acadmica de Electrotecnia Industrial.
Personas que directa o indirectamente intervienen en el proyecto.
Proyecto de titulacin.
Pgina 17
Carrera Profesional de Electrotecnia Industrial.
1.8.
ALCANCE.
El alcance que tendr con la implementacin del presente modulo ser
la aplicacin prctica de la teora impartida en las Unidades Didcticas
de donde se desarrollan temas de automatizacin industrial.
Efectivamente este material nos va permitir realizar los siguientes:
Utilizar ntegramente el material en el desarrollo de las diferentes
Unidades Didcticas indicadas anteriormente y de todas unidades
didcticas que estn relacionadas con la automatizacin industrial.
Utilizar el equipo en exposiciones, seminarios y otros de esta forma
se
tendr
una
formacin
tangible
veraz;
respecto
la
automatizacin.
1.9.
UNIVERSO.
La poblacin o universo constituye el Instituto de Educacin Superior
Tecnolgico Publico Tpac Amaru-Cusco.
1.10. MUESTRA.
Est conformado por la carrera profesional de Electrotecnia Industrial
donde se va implementar el mdulo de: DISEO Y CONSTRUCCIN
DE UN MDULO PARA CONTROL DE UN MOTOR TRIFSICO DE
1HP, MEDIANTE VARIADOR DE FRECUENCIAS (VARIACIN DE
FRECUENCIA PROGRAMABLE)
Proyecto de titulacin.
Pgina 18
Carrera Profesional de Electrotecnia Industrial.
1.11. CRONOGRAMA DE ACTIVIDADES
PROGRAMACION
Recopilacin de datos
Procesamiento de informacin
Evaluacin y diseo del proyecto
Construccin de la estructura
Instalacin de motor y circuito
Armar de tablero
Instalacin
de
variador
NOVIEMBRE
OCTUBRE
SEPTIEMBRE
AGOSTO
JULIO
JUNIO
MAYO
AO 2016
ABRIL
N ACTIVIDADES
de
frecuencias
8
Prueba de todo el proceso
Conclusin del proyecto
Proyecto de titulacin.
Pgina 19
Carrera Profesional de Electrotecnia Industrial.
CAPITULO II
2.0. MARCO TERICO.
2.1. INTERRUPTOR TERMOMAGNETICO.
Definicin: es un dispositivo capaz de interrumpir la corriente elctrica de un
circuito cuando sta sobrepasa ciertos valores mximos. Su funcionamiento se
basa en dos de los efectos producidos por la circulacin de corriente en un
circuito: el magntico y el trmico (efecto Joule). El dispositivo consta, por
tanto, de dos partes, un electroimn y una lmina bimetlica, conectadas en
serie y por las que circula la corriente que va hacia la carga.
Al igual que los fusibles, los interruptores magneto trmicos protegen la
instalacin contra sobrecargas y cortocircuitos.
Graf. N1Termo magntico
2.1.2. FUNCIONAMIENTO DEL TERMO MAGNTICO
El funcionamiento de un interruptor termo magntico se basa en dos de los
efectos producidos por la circulacin de corriente elctrica en un circuito: el
magntico y el trmico (efecto Joule). El dispositivo consta, por tanto, de dos
partes, un electroimn y una lmina bimetlica, conectadas en serie y por las
que circula la corriente hacia la carga.
Proyecto de titulacin.
Pgina 20
Carrera Profesional de Electrotecnia Industrial.
Graf. N2 esquema de funcionamiento del termo magntico
2.1.3. PARTES DE UN INETERRUPTOR TERMOMAGNETICO
Est constituido por una lmina bimetlica que se curva por efecto del calor
producido por la circulacin de la corriente elctrica. Esta deformacin
temporaria de la lmina se produce debido a los diferentes grados de dilatacin
de los dos metales que la componen y es la que provoca la apertura del
interruptor. Por otro lado el disparador magntico est constituido por una
bobina (electroimn) que atrae el ncleo (pieza articulada) que est en su
interior. Cuando la corriente llega a un cierto valor la bobina atrae
completamente al ncleo el cual acciona el dispositivo mecnico produciendo la
apertura de los contactos principales del interruptor.
Graf. N3 partes de termo magnticos
Proyecto de titulacin.
Pgina 21
Carrera Profesional de Electrotecnia Industrial.
2.1.4. CARACTERSTICAS DEL INTERRUPTOR TERMO MAGNTICO
Las caractersticas que definen un interruptor termo magntico son el
amperaje, el nmero de polos, el poder de corte y el tipo de curva de disparo
(B, C, D, MA). (Por ejemplo, Interruptor termo magntico C-16A-IV 4,5kA, que
necesita unos 10x16A -entre 5 y 10 veces el amperaje indicado- para saltar en
menos de un segundo y proteger el circuito. Si fuese B-16A-IV 4,5kA
necesitara unos 5x16 A (entre tres y cinco veces el valor nominal indicado).
Una corriente mantenida de 16 A provocara el disparo al cabo de una hora.
Graf. N4 caractersticas de interruptores
2.1.5. VENTAJAS DE TERMO MAGNTICOS
Proyecto de titulacin.
Pgina 22
Carrera Profesional de Electrotecnia Industrial.
Apto especialmente para el montaje en tableros de distribucin de poca
profundidad en instalaciones domiciliarias o de edificios. Segura y rpida
conexin de los conductores de alimentacin por el desplazamiento de las
barras colectoras hacia la parte posterior. Bornes idnticos en ambos lados,
para la alimentacin alternativa por la parte superior o inferior indistintamente.
Montaje y desmontaje sin herramientas. Una rpida y cmoda separacin del
sistema de interconexin es posible. Identificacin ptica separada de la
posicin del interruptor y en el mercado tenemos diferentes marcas
reconocidas, recomendables como aparece en cuadro de imagen.
Graf.N5 marcas de termo magnticos
2.2.0.
EL CONTACTOR.
Definicin: El contactor es un aparato elctrico de mando a distancia, que
puede cerrar o abrir circuitos, ya sea en vaco o en carga. Es la pieza clave del
automatismo en el motor elctrico. Su principal aplicacin es la de efectuar
maniobras de apertura y cierra de circuitos relacionados con instalaciones de
motores. Excepto los pequeos motores individuales, que son accionados
manualmente o por rels, el resto de motores se accionan por.
Proyecto de titulacin.
Pgina 23
Carrera Profesional de Electrotecnia Industrial.
Graf. N6 contactor y simbologa de contactos
Contactores. Un contactor est formado por una bobina y unos contactos, que
pueden estar abiertos o cerrados, y que hacen de interruptores de apertura y
cierre de la corriente en el circuito. La bobina es un electroimn que acciona los
contactos, abriendo los cerrados y cerrando el contacto abierto. Cuando le deja
de llegar corriente a la bobina los contactos vuelven a su estado de reposo.
2.2.1. FUNCIONAMIENTO Y PARTES DEL CONTACTOR
Graf.N7 partes del contactor
Proyecto de titulacin.
Pgina 24
Carrera Profesional de Electrotecnia Industrial.
Si hacemos llegar corriente a la bobina, est que est formada por un
electroimn, atrae hacia s el martillo arrastrando en su movimiento a los
contactos mviles que tirar de ellos hacia la izquierda. Esta maniobra se llama
"enclavamiento del contactor". Todos los contactos que estaban abiertos ahora
sern contactos cerrados, y el ltimo que estaba cerrado ahora ser un
contacto abierto. Cuando la bobina est activada se dice que el contactor est
enclavado. En el momento que dejemos de dar corriente a la bobina el
contactor volver a su posicin de reposo por la accin del muelle resorte,
dejando los contactos como estaban al principio, al tirar de ellos hacia la
derecha. Vamos a conectar en un circuito el contactor para el arranque de un
motor trifsico:
Graf. N8 arranque del motor elctrico
Si te fijas la bobina se activa a travs de un interruptor por una fase y el neutro
(L1 y N), es decir a 220V. El motor trifsico se activa a travs de los contactos
principales del contactor con las 3 fases (L1,L2 y L3), por ejemplo
380V.Cuando activamos el Interruptor le llega corriente a la bobina y el
contactor se enclava cerrando los contactos principales y arrancando el motor.
Cuando desconectamos el interruptor deja de llegarle corriente a la bobina y
Proyecto de titulacin.
Pgina 25
Carrera Profesional de Electrotecnia Industrial.
los contactos vuelven a la posicin de reposo haciendo que el motor se pare.
Como ves en los circuitos de los contactores se distinguen dos circuitos
diferentes, el circuito de mando, que ser el que active o desactive la bobina y
el circuito de fuerza, que ser el que arranque o pare el motor.El circuito de
mando suele ser un circuito a menor tensin e intensidad que el circuito de
fuerza. De ah que los contactos principales o de fuerza sean ms gordos que
los auxiliares. En el esquema anterior no hemos usado los contactos auxiliares,
solo el de la bobina, pero ya vers cmo se utilizan para por ejemplo el auto
alimentacin. Una de las caractersticas bsicas de un contactor es su
posibilidad de maniobra en circuitos sometidos a corrientes muy fuertes, en el
circuito de fuerza, pero con pequeas corrientes en el circuito de mando. Por
ejemplo para activar la bobina 0,35A a 220V y para el de Fuerza 200A.
2.2.2. VENTAJAS DEL USO DEL CONTACTOR
Seguridad del personal dado que realiza las maniobras en lugares alejados del
operador. El motor y el contactor pueden estar lejos del operador, solo es
necesario que el operador este cerca del interruptor de arranque para accionar
el motor, y como vimos esta parte trabaja a tensiones menores que las de
fuerza (donde est el motor y/o el contactor. Imagina que tenemos el interruptor
de arranque separado del motor 1Km y el contactor est sobre el propio motor
o muy cerca de l. El circuito desde el interruptor hasta el motor es el circuito
auxiliar, a poca tensin, con poca intensidad y por lo tanto con cables muy finos
o de poca seccin. Los cables de ms seccin son los que van del contactor al
motor, y esto solo tendr la longitud desde el contactor al motor, es decir sern
muy cortos. Qu ventaja tiene esto? Pues que es un gran ahorro en el gasto
de los cables o conductores. Imagina que tuviramos que arrancar el motor
directamente sin contactor, desde el interruptor, que por cierto tendra que ser
mucho mayor y ms caro, hasta el motor, todos los cables seran de fuerza y
mediran 1Km de largos, con lo cual sera mucho mayor el coste en
conductores, ahorro de tiempo al realizar maniobras largas. Posibilidad de
controlar el arranque de un motor desde puntos diferentes automatizacin del
arranque de motores. Automatizacin y control de numerosas aplicaciones, con
ayuda de los aparatos auxiliares del contactor. Ejemplos: llenado automtico de
un pozo de agua, control de la temperatura en hornos, etc.
Proyecto de titulacin.
Pgina 26
Carrera Profesional de Electrotecnia Industrial.
2.2.3. ELECCIN DEL CONTACTOR.
A la hora de elegir un contactor de maniobra de motores hay que tener en
cuenta los siguientes factores:
Tensin y potencia nominales de la carga, o sea del motor.
Tensin y frecuencia reales de alimentacin de la bobina y de los
elementos del circuito auxiliar.
Clase de arranque del motor: directo, estrella-tringulo, etc.
Nmero aproximado de conexiones-hora.
Condiciones de trabajo normales, duros o extremas. Podran ser
calefaccin elctrica, ascensores, gras, mquinas de imprimir etc.
Arranque de Motores por Contactor, Vamos a ver algunos circuitos
bsicos de arranque de motores por contactor. En este caso usaremos
contactores trifsicos.
Graf. N9 esquema de circuito del mando y fuerza
2.2.4. APLICACIN DE LOS CONTACTORES.
Proyecto de titulacin.
Pgina 27
Carrera Profesional de Electrotecnia Industrial.
La aplicacin ms conocida del contactor es su utilizacin para el mando de
motores elctricos, pero existe muchas ms aplicaciones como:
Circuitos de calefaccin
Circuito de alumbrado
Transformadores
En la conexin de condensadores correctores del factor de potencia
Tambin existe contactores para media tensin
2.3.0. RELE TERMICO.
Los rels trmicos son los aparatos ms utilizados para proteger los motores
contra las sobrecargas dbiles y prolongadas. Se pueden utilizar en corriente
alterna o continua. Este dispositivo de proteccin garantiza.
Optimizacin la duracin de los motores, impidiendo que funcionen en
condiciones de calentamiento anmalas. La continuidad de explotacin de las
maquinas o las instalaciones evitando paradas imprevistas.
Volver a arrancar despus de un disparo con la mayor rapidez y las mejores
condiciones de seguridad posible para los equipos y las personas.
Graf. N10 rel trmico y simbologa
Proyecto de titulacin.
Pgina 28
Carrera Profesional de Electrotecnia Industrial.
Grafico n11 partes de rel trmico
Bsicamente un rel consta de dos partes; una bobina y unos contactos.
BOBINA: Es un arrollamiento de hilo, generalmente de cobre, que se acopla
sobre un ncleo de hierro magntico.
CONTACTOS: los contactos son unas lminas metlicas que se juntan o
separan segn apliquemos tensin a la bobina del rel.
2.3.1 PRINCIPIOS DE FUNCIONAMIENTO DE UN RELE TERMICO.
Los rels trmicos tripolares poseen tres bilminas compuestas cada una por
dos metales con coeficientes de dilatacin muy diferentes unidos mediante
lminas y rodeado de un bobinado de calentamiento. Cada bobinado de
calentamiento
est conectado en serie a una fase del motor. La corriente
absorbida por el motor calienta los bobinados, haciendo que las bilminas se
deforme en mayor o menor grado segn la intensidad de corriente. La
deformacin de
las bilminas provoca a su vez el momiviento giratorio de
una leva o de un rbol unido al dispositivo de disparo.
Proyecto de titulacin.
Pgina 29
Carrera Profesional de Electrotecnia Industrial.
2.3.2 FUNCIONAMIENTO DE UN RELE TERMICO.
Su misin consiste en desconectar el circuito cuando la intensidad consumida
por el motor, supera durante un tiempo corto, a la permitida por este, evitando
que bobinado se queme. Este ocurre gracias a que consta de tres laminas
bimetlicas con sus correspondientes bobinas calefactoras que cuando son
recorridas por una determinada intensidad, provocan el calentamiento
del
bimetal y la apertura del rel.
2.4.0 MOTOR ELCTRICO.
Un motor
elctrico es
una mquina
elctrica que
transforma energa
elctrica en energa mecnica por medio de interacciones electromagnticas.
Algunos de los motores elctricos son reversibles, pueden transformar energa
mecnica en energa elctrica funcionando como generadores. Los motores
elctricos de traccin usados en locomotoras realizan a menudo ambas tareas,
si se los equipa con frenos regenerativos.
Son ampliamente utilizados en instalaciones industriales, comerciales y
particulares. Pueden funcionar conectados a una red de suministro elctrico o
a bateras. As, en automviles se estn empezando a utilizar en vehculos
hbridos para aprovechar las ventajas de ambos.
Graf. N12 motor
Proyecto de titulacin.
Pgina 30
Carrera Profesional de Electrotecnia Industrial.
2.4.1. PARTES FUNDAMENTALES DE UN MOTOR ELCTRICO
Dentro de las caractersticas fundamentales de los motores elctricos, stos se
hallan formados por varios elementos, sin embargo, las partes principales son:
el estator, la carcasa, la base, el rotor, la caja de conexiones, las tapas y los
cojinetes. No obstante, un motor puede funcionar solo con el estator y el rotor.
Graf. N13 partes estructural del motor
1) Estator: El estator es el elemento que opera como base, permitiendo que
desde ese punto se lleve a cabo la rotacin del motor. El estator no se mueve
mecnicamente, pero si magnticamente. Existen dos tipos de estatores
a) Estator de polos salientes.
b) Estator ranurado.
Proyecto de titulacin.
Pgina 31
Carrera Profesional de Electrotecnia Industrial.
Graf. N14 tipo del estator.
El estator est constituido principalmente de un conjunto de lminas de acero al
silicio (y se les llama "paquete"), que tienen la habilidad de permitir que pase a
travs de ellas el flujo magntico con facilidad; la parte metlica del estator y
los devanados proveen los polos magnticos. Los polos de un motor siempre
son pares (pueden ser 2, 4, 6, 8, 10, etc.,), por ello el mnimo de polos que
puede tener un motor para funcionar es dos (un norte y un sur).
2) El rotor: es el elemento de transferencia mecnica, ya que de l depende la
conversin de energa elctrica a mecnica. Los rotores, son un conjunto de
lminas de acero al silicio que forman un paquete, y pueden ser bsicamente
de tres tipos:
a) Rotor ranurado
b) Rotor de polos salientes
c) Rotor jaula de ardilla
Graf. N15 tipos de rotor.
2.4.2. MOTOR ASINCRNICO DE ROTOR BOBINADO.
Proyecto de titulacin.
Pgina 32
Carrera Profesional de Electrotecnia Industrial.
Se utiliza en aquellos casos en los que la transmisin de potencia es
demasiado elevada (a partir de 200 KW) y es necesario reducir las corrientes
de arranque. Tambin se utiliza en aquellos casos en los que se desea regular
la velocidad del eje.
Su caracterstica principal es que en el rotor se aloja un conjunto de bobinas
que adems se pueden conectar al exterior a travs de anillos rasantes.
Colocando resistencias variables en serie a los bobinados del rotor se consigue
suavizar las corrientes de arranque. De la misma manera, gracias a un
conjunto de resistencias conectadas a los bobinados del rotor, se consigue
regular la velocidad del eje. Un detalle interesante es que la velocidad del eje
nunca podr ser superior que la velocidad correspondiente si el motor fuera
sncrono.
2.4.3. MOTORES ASINCRNICOS, JAULA DE ARDILLA.
Graf. N16 estator y rotor de motor asncrono
Es sin duda el ms comn de todos los motores elctricos, por su sencillez y
forma constructiva. Elimina el devanado en el rotor o inducido. Las planchas
magnticas forman el ncleo del rotor, una vez ensambladas dejan unos
espacios cilndricos que sustituyen a las ranuras de los rotores bobinados, por
Proyecto de titulacin.
Pgina 33
Carrera Profesional de Electrotecnia Industrial.
estas ranuras pasan unas barras de cobre (o aluminio) que sobresalen
ligeramente del ncleo, estas barras o conductores estn unidos en ambos
lados por unos anillos de cobre. Se denomina Jaula de Ardilla por la similitud
que tiene con una jaula.
Cuando este rotor est entre dos polos de campo electromagnticos que han
sido magnetizados por una corriente alterna, se induce una f.e.m. en las
espiras de la jaula de ardilla, una corriente muy grande las recorre y se produce
un fuerte campo que contrarresta al que ha producido la corriente (ley de Lenz).
Aunque el rotor pueda contrarrestar el campo de los polos estacionarios, no
hay razn para que se mueva en una direccin u otra y as permanece parado.
Es similar al motor sncrono el cual tampoco se arranca solo. Lo que se
necesita es un campo rotatorio en lugar de un campo alterno.
PAR MOTOR.
Cuando las lneas del campo magntico cortan las barras del rotor, se produce
en ellas una fuerza electromotriz que da lugar a corrientes que circulan en los
sentidos opuestos (en los hilos ms prximos a los polos) es decir, que se
producen esas corrientes en hilo separado 180.
Estos hilos se ven sometidos a unas fuerzas que tienden a moverlos en
direccin perpendicular al campo magntico y produciendo con ello el llamado
par motor.
En un motor elctrico, el par motor y la velocidad de giro n estn relacionadas
de tal forma que cuando la velocidad decrece el par aumenta.
PAR DE GIRO.
El valor del par de giro del motor viene dado por:
M=K.Q.Ir
K = constante
Q = Flujo magntico del campo giratorio
Ir = intensidad de corriente del rotor
2.4.4. CLASIFICACIN DE LOS MOTORES DE CORRIENTE ALTERNA.
Por su velocidad de giro:
Proyecto de titulacin.
Pgina 34
Carrera Profesional de Electrotecnia Industrial.
1. Asncrono: Son aquellos motores elctricos en los que el rotor nunca
llega a girar en la misma frecuencia con la que lo hace el campo
magntico del estator. Cuanto mayor es el par motor mayor es esta
diferencia de frecuencias.
2. Motores Sncronos: Son aquellos motores elctricos en los que el
rotor nunca llega a girar en la misma frecuencia con la que lo hace el
campo magntico del estator. Cuanto mayor es el par motor mayor es
esta diferencia de frecuencias. Este motor tiene la caracterstica de que
su velocidad de giro es directamente proporcional a la frecuencia de la
red de corriente alterna que lo alimenta. Es utilizado en aquellos casos
en donde se desea una velocidad constante.
Se utilizan para convertir potencia elctrica en potencia mecnica de rotacin.
La caracterstica principal de este tipo de motores es que trabajan a velocidad
constante que depende solo de la frecuencia de la red y de otros aspectos
constructivos de la mquina. A diferencia de los motores asincrnicos, la
puesta en marcha requiere de maniobras especiales a no ser que se cuente
con un sistema automtico de arranque. Otra particularidad del motor sncrono
es que al operar de forma sobreexcitado consume potencia reactiva y mejora el
factor de potencia.
Las mquinas sncronas funcionan tanto como generadores y como motores.
En nuestro medio sus aplicaciones son mnimas y casi siempre estn
relacionadas en la generacin de energa elctrica. Para el caso referente a la
mquina
rotativa
sncrona,
todas
las
centrales
Hidroelctricas
Termoelctricas funcionan mediante generadores sncronos trifsicos.
Para el caso del motor se usa principalmente cuando la potencia demandada
es muy elevada, mayor que 1MW (mega vatio).
Los motores sncronos se subdividen a su vez, de acuerdo al tipo del rotor que
utilizan, siendo estos: rotor de polos lisos (polos no salientes) y de polos
salientes.
Proyecto de titulacin.
Pgina 35
Carrera Profesional de Electrotecnia Industrial.
Graf. N17 motor con rotor de polos lisos
Motores con
rotor de polos lisos o polos no salientes: se utilizan en
rotores de dos y cuatro polos. Estos tipos de rotores estn construidos al
mismo nivel de la superficie del rotor. Los motores de rotor liso trabajan a
elevadas velocidades.
Motores de polos salientes: Los motores de polos salientes trabajan a bajas
velocidades. Un polo saliente es un polo magntico que se proyecta hacia fuera
de la superficie del rotor. Los rotores de polos salientes se utilizan en rotores de
cuatro o ms polos.
Graf.n18 Motores de polos salientes
2.4.5. POR EL TIPO DE ROTOR.
1. Motores de anillos rozantes:
Es similar al motor trifsico jaula de ardilla,
su estator contiene los bobinados que generan el campo magntico giratorio.
El objetivo del diseo del motor de anillos rasantes es eliminar la corriente
excesivamente alta del arranque y el troqu elevado asociado con el motor de
jaula de ardilla. Cuando el motor se arranca un voltaje es inducido en el rotor,
Proyecto de titulacin.
Pgina 36
Carrera Profesional de Electrotecnia Industrial.
con la resistencia agregada de la resistencia externa la corriente del rotor y por
lo tanto el troqu pueden controlarse fcilmente
2. Motores con colector: Los colectores tambin son llamados anillos
rotatorios, son comnmente hallados en mquinas elctricas de corriente alterna
como generadores, alternadores, turbinas de viento, en las cuales conecta la corriente
de campo o excitacin con el bobinado del rotor.
Pueden entregar alta potencia con dimensiones y peso reducidos.
Pueden soportar considerables sobrecargas temporales sin detenerse
completamente.
Se adaptan a las sobrecargas disminuyendo la velocidad de rotacin, sin
excesivo consumo elctrico.
Producen un elevado torque de funcionamiento.
3. Motores de jaula de ardilla: un motor elctrico con un rotor de jaula de
ardilla tambin se llama "motor de jaula de ardilla". En su forma instalada, es un
cilindro montado en un eje. Internamente contiene barras conductoras
longitudinales de aluminio o de cobre con surcos y conectados juntos en ambos
extremos poniendo en cortocircuito los anillos que forman la jaula. El nombre
se deriva de la semejanza entre esta jaula de anillos y barras y la rueda de un
hmster (ruedas probablemente similares existen para las ardillas domsticas).
2.4.6. POR SU NMERO DE FASES DE ALIMENTACIN.
Motores monofsicos; Fueron los primeros motores utilizados en la industria.
Cuando este tipo de motores est en operacin, desarrolla un campo
magntico rotatorio, pero antes de que inicie la rotacin, el estator produce un
campo estacionario pulsante.
Para producir un campo rotatorio y un par de arranque, se debe tener un
devanado auxiliar desfasado 90 con respecto al devanado principal. Una vez
que el motor ha arrancado, el devanado auxiliar se desconecta del circuito.
Proyecto de titulacin.
Pgina 37
Carrera Profesional de Electrotecnia Industrial.
Motores trifsicos; Los motores trifsicos usualmente son ms utilizados en la
industria, ya que en el sistema trifsico se genera un campo magntico
rotatorio en tres fases, adems de que el sentido de la rotacin del campo en
un motor trifsico puede cambiarse invirtiendo dos puntas cualesquiera del
estator, lo cual desplaza las fases, de manera que el campo magntico gira en
direccin opuesta.
Tipos y caractersticas; Los motores trifsicos se usan para accionar
mquinas-herramientas, bombas, elevadores, ventiladores, sopladores y
muchas otras mquinas.
Bsicamente estn construidos de tres partes esenciales: Estator, rotor y tapas.
El estator consiste de un marco o carcasa y un ncleo laminado de acero al
silicio, as como un devanado formado por bobinas individuales colocadas en
sus ranuras. Bsicamente son de dos tipos:
De jaula de ardilla.
De rotor devanado
El de jaula de ardilla es el ms usado y recibe este nombre debido a que
parece una jaula de ardilla de aluminio fundido. Ambos tipos de rotores
contienen un ncleo laminado en contacto sobre el eje. El motor tiene tapas en
ambos lados, sobre las cuales se encuentran montados los rodamientos o
baleros sobre los que rueda el rotor. Estas tapas se fijan a la carcasa en ambos
extremos por medio de tomillos de sujecin. Los rodamientos, baleros o
rodamientos pueden ser de rodillos o de deslizamiento.
2.4.7. CARACTERSTICA DE FUNCIONAMIENTO DEL MOTOR DE
INDUCCIN.
El funcionamiento de un motor, en general, se basa en las propiedades
electromagnticas de la corriente elctrica y la posibilidad de crear a partir de
ellas, un campo magntico giratorio que induce un movimiento de rotacin.
Suponiendo que un motor de induccin comercial de jaula de ardilla se haga
arrancar con el voltaje nominal en las terminales de lnea de su estator
(arranque a travs de la lnea) desarrollar un par de arranque de que har que
aumente su velocidad. Al aumentar su velocidad a partir del reposo (100 por
ciento de deslizamiento), disminuye su deslizamiento y su par disminuye hasta
Proyecto de titulacin.
Pgina 38
Carrera Profesional de Electrotecnia Industrial.
el valor en el que se desarrolle el par mximo. Esto hace que la velocidad
aumente todava ms, reducindose en forma simultnea el deslizamiento y el
par que desarrolla el motor de induccin.
Los pares desarrollados al arranque y al valor del deslizamiento que produce el
par mximo ambos exceden (en el caso normal) al par aplicado a la carga. Por
lo tanto la velocidad del motor aumentar, hasta que el valor del deslizamiento
sea tan pequeo que el par que se desarrolla se reduzca a un valor igual al par
aplicado por la carga. El motor continuar trabajando a esta velocidad y valor
de equilibrio del deslizamiento hasta que aumente o disminuya el par aplicado.
En la figura 2.3 se muestra la relacin entre los pares de arranque, mximo y
nominal a plena carga que desarrolla un motor de induccin, como funcin de
la velocidad de ste y del deslizamiento. Se tiene tambin la presentacin
grfica de la corriente y el par desarrollados en el rotor del motor como
funciones del deslizamiento desde el instante del arranque (punto a) hasta la
condicin de funcionamiento en estado estable (en general entre marcha en
vaco y marcha a plena carga - puntos c y d) cuando los pares desarrollado y
aplicado son iguales.
2.4.8. ARRANQUE DE UN MOTOR TRIFSICO DE INDUCCIN.
Graf. N19 red elctrica trifsica
Se denomina arranque de un motor al rgimen transitorio en el que se eleva la
velocidad del mismo desde el estado de motor detenido hasta el de motor
girando a la velocidad de rgimen permanente.
Proyecto de titulacin.
Pgina 39
Carrera Profesional de Electrotecnia Industrial.
Son necesarios los arrancadores para limitar la corriente de armadura que fluye
cuando el motor se conecta, pues en el momento de arranque la corriente que
alcanza el motor de induccin conectado directamente es de 4 a 8 veces la
corriente del mismo a plena carga, y aunque puede ser de corta duracin,
producira sobrecargas en la lnea y consecuentemente cadas de voltaje muy
incidente en la red.
2.4.9. FUNDAMENTOS BSICOS SOBRE EL CONTROL DE
VELOCIDAD DE UN MOTOR TRIFSICO DE INDUCCIN.
El motor de corriente alterna, a pesar de ser un motor robusto, de poco
mantenimiento, liviano e ideal para la mayora de las aplicaciones industriales,
tiene el inconveniente de ser un motor rgido en cuanto a la posibilidad de
variar su velocidad. La velocidad del motor asincrnico depende de la forma
constructiva del motor y de la frecuencia de alimentacin.
Como la frecuencia de alimentacin que entregan las compaas de
electricidad es constante, la velocidad de los motores asincrnicos es
constante, salvo que se vare el nmero de polos, el deslizamiento o la
frecuencia.
2.4.10. FORMAS DE CONTROL DE VELOCIDAD DE UN MOTOR
TRIFSICO DE INDUCCIN.
Se puede variar la velocidad del motor trifsico de induccin actuando sobre
las variables de las que depende.
2.4.11. CONTROL DE VELOCIDAD MEDIANTE EL CAMBIO EN LA
FRECUENCIA DE ALIMENTACIN.
Al cambiar la frecuencia elctrica aplicada al estator del motor de induccin, la
velocidad de rotacin de sus campos magnticos Nsinc cambiar en proporcin
directa al cambio de la frecuencia elctrica, y el punto de vaco sobre la curva
caracterstica par-velocidad cambiar con ella. La velocidad del motor en
condiciones nominales se llama velocidad base. Se puede ajustar la velocidad
del motor por encima o por debajo de la velocidad base, utilizando control de
frecuencia variable, como se puede ver en la fig. 2.4 donde la velocidad base
es 1800 r.p.m.
Proyecto de titulacin.
Pgina 40
Carrera Profesional de Electrotecnia Industrial.
CAPITULO III
3.0. VARIADOR DE VELOCIDAD.
3.1. CONTROLADOR DE VELOCIDAD.
Sistema motriz a las condiciones variables de los procesos involucrados. Este
control de velocidad ha jugado un papel importante en la ingeniera mecnica,
desde los inicios de la Revolucin Industrial. A principios del siglo XVIII, James
Watt desarroll e incorpor a su mquina de vapor su ya famoso gobernador
de velocidad centrfugo. Posteriormente surgieron muchas aplicaciones donde
era necesario variar la velocidad de los procesos y se desarrollaron varios
mtodos para lograrlo, tales como la moto reductores, reductores de catarinas,
bandas y poleas, embragues hidrulicos, etc. Todos ellos en su momento
fueron la mejor opcin mecnicamente hablando, para controlar o reducir la
velocidad de un determinado proceso. Sin embargo, se desarroll tambin el
motor de corriente directa cuyas condiciones de operacin lo hacen idneo
para variar su velocidad sin detrimento de sus parmetros de funcionamiento,
ya que para operar es necesario un control que alimente voltaje y corriente a su
campo y su armadura, lo que provoca, que su velocidad vare de acuerdo con
las condiciones de alimentacin de este control. Aunque todos estos procesos
son muy confiables y se aplican con mucha frecuencia an en la actualidad,
tienen una caracterstica en comn, desperdician mucha energa. Ya sea por la
gran cantidad de engranes, poleas, etc., para el caso de los de tipo mecnico,
como por el dispendio de energa en devanados, armadura, excitacin, etc. de
los motores de corriente directa; mientras que para ambos casos el
mantenimiento es complicado y costoso, lo que los hace an ms onerosos.
Debido a todos estos inconvenientes para variar la velocidad en los procesos,
se busc la manera de poder hacerlo de una forma sencilla, confiable y de bajo
costo. Esto no fue posible sino hasta finales de los setentas, ya que con el
desarrollo de la electrnica de potencia, se pudo lograr el control de velocidad
de un motor de corriente alterna de induccin, mediante la utilizacin de un
Proyecto de titulacin.
Pgina 41
Carrera Profesional de Electrotecnia Industrial.
variador de frecuencia. Este variador alimenta al motor un voltaje modulado,
con lo que simula una variacin de frecuencia en las terminales del motor y con
ello vara la velocidad de dicho motor sin detrimento considerable de sus
caractersticas de par y manteniendo la simplicidad de operacin y facilidad de
mantenimiento del motor jaula de ardilla, comparativamente con los motores de
corriente directa; adems de presentar mejores prestaciones en el control de
velocidad, de las que hablaremos posteriormente.
El Variador de Velocidad (VSD, por sus siglas en ingls Variable Speed Drive)
es en un sentido amplio un dispositivo o conjunto de dispositivos mecnicos,
hidrulicos, elctricos o electrnicos empleados para controlar la velocidad
giratoria de maquinaria, especialmente de motores. Tambin es conocido como
Accionamiento de Velocidad Variable (ASD, tambin por sus siglas en
ingls Adjustable-Speed Drive). De igual manera, en ocasiones es denominado
mediante el anglicismo Drive, costumbre que se considera inadecuada.
La maquinaria industrial generalmente es accionada a travs de motores
elctricos, a velocidades constantes o variables, pero con valores precisos. No
obstante, los motores elctricos generalmente operan a velocidad constante o
cuasi-constante, y con valores que dependen de la alimentacin y de las
caractersticas propias del motor, los cuales no se pueden modificar fcilmente.
Para
lograr
regular
la
velocidad
de
los
motores,
se
emplea
un controlador especial que recibe el nombre de variador de velocidad. Los
variadores
de
velocidad
se
emplean
en
una
amplia
gama
de
aplicaciones industriales, como en ventiladores y equipo de aire acondicionado,
equipo de bombeo, bandas y transportadores industriales, elevadores,
llenadoras, tornos y fresadoras, etc.
Un variador de velocidad puede consistir en la combinacin de un motor
elctrico y el controlador que se emplea para regular la velocidad del mismo. La
combinacin de un motor de velocidad constante y de un dispositivo mecnico
que permita cambiar la velocidad de forma continua (sin ser un motor paso a
paso) tambin puede ser designado como variador de velocidad.
Proyecto de titulacin.
Pgina 42
Carrera Profesional de Electrotecnia Industrial.
3.1.2. MOTIVOS PARA EMPLEAR VARIADORES DE VELOCIDAD.
El control de procesos y el ahorro de la energa son dos de las principales
razones para el empleo de variadores de velocidad. Histricamente, los
variadores de velocidad fueron desarrollados originalmente para el control de
procesos, pero el ahorro energtico ha surgido como un objetivo tan importante
como el primero.
Graf. N20 Aplicaciones de los variadores en bombas y ventiladores
Entre las diversas ventajas en el control del proceso proporcionadas por el
empleo de variadores de velocidad destacan:
Operaciones ms suaves.
Control de la aceleracin.
Distintas velocidades de operacin para cada fase del proceso.
Compensacin de variables en procesos variables.
Permitir operaciones lentas para fines de ajuste o prueba.
Ajuste de la tasa de produccin.
Permitir el posicionamiento de alta precisin.
Control del Par motor (torque).
Proyecto de titulacin.
Pgina 43
Carrera Profesional de Electrotecnia Industrial.
3.1.3. FOMENTAR EL AHORRO DE ENERGA MEDIANTE EL USO DE
VARIADORES DE VELOCIDAD.
Un equipo accionado mediante un variador de velocidad emplea generalmente
menor energa que si dicho equipo fuera activado a una velocidad fija
constante. Los ventiladores y bombas representan las aplicaciones ms
llamativas. Por ejemplo, cuando una bomba es impulsada por un motor que
opera a velocidad fija, el flujo producido puede ser mayor al necesario. Para
ello, el flujo podra regularse mediante una vlvula de control dejando estable la
velocidad de la bomba, pero resulta mucho ms eficiente regular dicho flujo
vlvula, ya que el motor no tendr que consumir una energa no aprovechada.
3.1.4. TIPOS DE VARIADORES DE VELOCIDAD.
Graf. N21 tipos de variadores mecnico, hidrulica y elctrico
En trminos generales, puede decirse que existen tres tipos bsicos de
variadores de velocidad: mecnicos, hidrulicos y elctrico-electrnicos. Dentro
de cada tipo pueden encontrarse ms subtipos, que se detallarn a
continuacin. Cabe aclarar que los variadores ms antiguos fueron los
mecnicos, que se emplearon originalmente para controlar la velocidad de las
ruedas hidrulicas de molinos, as como la velocidad de las mquinas de
vapores.
Proyecto de titulacin.
Pgina 44
Carrera Profesional de Electrotecnia Industrial.
Los variadores de velocidad mecnicos e hidrulicos generalmente son
conocidos como transmisiones cuando se emplean en vehculos, equipo
agroindustrial o algunos otros tipos de maquinaria.
3.1.5. VARIADORES MECNICOS.
VARIADOR
DE
PASO
AJUSTABLE:
Este
dispositivo
emplea poleas y bandas en las cuales el dimetro de una o ms
poleas puede ser modificado.
VARIADOR DE TRACCIN: Transmite potencia a travs de rodillos
metlicos. La relacin de velocidades de entrada/salida se ajusta
moviendo los rodillos para cambiar las reas de contacto entre ellos y
as la relacin de transmisin.
3.1.6. VARIADORES HIDRULICOS.
VARIADOR HIDROSTTICO: consta de una bomba hidrulica y un
motor hidrulico (ambos de desplazamiento positivo). Una revolucin
de la bomba o el motor corresponde a una cantidad bien definida de
volumen del fluido manejado. De esta forma la velocidad puede ser
controlada mediante la regulacin de una vlvula de control, o bien,
cambiando el desplazamiento de la bomba o el motor.
a) ADAPTANDO LAS CAPACIDADES DE UNA BOMBA A LA DEMANDA
DEL PROCESO
Continuamos hablando de las estrategias a tener en cuenta para reducir el
consumo energtico en bombas centrfugas y en esta ocasin nos centramos
en la adaptacin de las capacidades de la bomba a las capacidades del
proceso.
Proyecto de titulacin.
Pgina 45
Carrera Profesional de Electrotecnia Industrial.
Como hemos visto en otros artculos el diseo los motores y bombas no suelen
estar en la mayora de las ocasiones bien adaptados a la carga con la que
trabajan. Eso origina un consumo energtico bastante superior al previsto.
Veamos cmo podemos solucionar el problema.
La capacidad de una bomba centrfuga puede recularse ya sea por:
Velocidad constante.
Velocidad variable.
Capacidad de regulacin por velocidad variable.
La regulacin de la velocidad es eficiente ya que la energa a la bomba
se reduce con el incremento de la velocidad.
La velocidad de la bomba puede variar con:
Variadores hidrostticos/hidrulicos - acoplamiento hidrulico entre eje
de entrada y salida - el ratio de velocidad de 5 a 1 se controla ajustando
el volumen de aceite en el acoplamiento.
Variadores mecnicos - variador de roldana y correa.
Embrague/transmisin de corrientes de Foucault - par de carga de
transferencia de acoplamiento magntico entre el eje de entrada y
salida.
Variadores de velocidad variable - inversores - variadores AC variadores de frecuencia ajustable - operan mediante la variacin de la
frecuencia y el voltaje al motor elctrico.
Los cambios en el consumo de energa, cambios en altura y volumen
pueden ser estimados con las leyes de afinidad que veremos en la
segunda parte de este artculo.
b) REGULACIN DE CAPACIDAD POR VELOCIDAD CONSTANTE.
La capacidad de una bomba puede variar con:
Proyecto de titulacin.
Pgina 46
Carrera Profesional de Electrotecnia Industrial.
1) Estrangulamiento; El estrangulamiento puede llevarse a cabo abriendo y
cerrando una vlvula de descarga. El estrangulamiento es ineficiente en
energa ya que la energa a la bomba no se reduce. La energa se derrocha
incrementando la prdida dinmica.
Caudal de derivacin. La capacidad de descarga puede ser regulada
llevando una parte del caudal de descarga al lado de succin de la
bomba. El caudal de derivacin es ineficiente ya que la energa a la
bomba no se reduce.
Dimetro del impulsor cambiante. La reduccin del dimetro de los
impulsores es un cambio permanente.
Modificacin del impulsor. El caudal y la altura manomtrica pueden
modularse cambiando las hlices de las bombas. Se trata de un proceso
complicado que se utiliza raramente.
Regulacin de la bomba y consumo de energa.
El consumo de energa de algunos de los mtodos de regulacin puede verse
en la siguiente figura:
Proyecto de titulacin.
Pgina 47
Carrera Profesional de Electrotecnia Industrial.
Graf. N22 Adaptando las capacidades de una bomba a la demanda del
proceso.
El cambio en el consumo de energa de una bomba en funcin de la altura
manomtrica y el caudal volumtrico puede determinarse con las leyes de
afinidad. Veamos cmo aplicarlas fcilmente:
Las leyes de afinidad de las bombas centrfugas o ventiladores indican la
influencia en la capacidad de volumen, altura manomtrica (presin) y/o
consumo de la bomba o ventilador debido a:
Cambio en la velocidad en revoluciones por minuto del rodete de la bomba.
Similaridad geomtrica - cambio en el dimetro del impulsor.
Las leyes de afinidad son idnticas en ventiladores y bombas.
Sin entrar en detalles de clculo a los que nos referiremos al final vamos a
hacer unas reflexiones sobre cmo cambia el consumo de la bomba conforme
aumenta la velocidad del rodete.
En la figura mostramos cmo para un rodete vara el consumo energtico
conforme
aumenta
la
velocidad.
De
ella
entraremos
las
siguientes
conclusiones:
Proyecto de titulacin.
Pgina 48
Carrera Profesional de Electrotecnia Industrial.
2) Variador hidrodinmico; Emplea aceite hidrulico para transmitir par
mecnico entre un impulsor de entrada (sobre un eje de velocidad constante) y
un rotor de salida (sobre un eje de velocidad ajustable). Tambin
llamado acoplador hidrulico de llenado variable.
Voith es el fabricante lder de acoplamientos hidrodinmicos de velocidad
variable y convertidores de torque alrededor del mundo. Los acoplamientos son
utilizados en la industria de la generacin elctrica, del gas y del petrleo, la
industria qumica y de transformacin de materias primas para controlar
bombas, compresores, ventiladores y molinos; as como para el arranque de
turbinas de gas. Las aplicaciones de nuestros equipos se caracterizan por
requerir alta confiabilidad, seguridad operacional y disponibilidad en conjunto
con un bajo costo de operacin y mantenimiento. Mediante el uso
acoplamientos Voith de velocidad variable se puede lograr un considerable
ahorro energtico y econmico, flexibilizar procesos, extender la vida de la
maquinaria y el motor adems reducir el gasto en mantenimiento de un tren
motriz. Nuestra tecnologa permite a nuestros equipos operar en las
condiciones ms adversas con un diseo robusto y compacto. Nuestro rango
de operacin parte de 100kW hasta 50,000 kW y velocidades de hasta 20,000
rpm. , estos productos se pueden encontrar en:
Bombas, ventiladores y compresores centrfugos.
Bombas y compresores de desplazamiento positivo.
Agitadores industriales y mquinas centrfugas.
Convertidor de Torque Los convertidores de torque Voith son unidades
hidrodinmicas que varan continuamente el torque y la velocidad entre la
flecha de entrada y la de salida. Debido a sus caractersticas de torquevelocidad, el convertidor de torque es ideal para auxiliar al arranque de
gas.
3) variador hidroviscoso; consta de uno o ms discos conectados con un eje
de entrada, los cuales estar en contacto fsico (pero no conectados
mecnicamente) con uno o ms discos conectados al eje de salida. El par
mecnico (torque) se transmite desde el eje de entrada al de salida a travs de
Proyecto de titulacin.
Pgina 49
Carrera Profesional de Electrotecnia Industrial.
la pelcula de aceite entre los discos. De esta forma, el par transmitido es
proporcional a la presin ejercida por el cilindro hidrulico que presiona los
discos.
3.2.0. VARIADORES ELCTRICO-ELECTRNICOS.
Existen cuatro categoras de variadores de velocidad elctrico-electrnicos:
o Variadores para motores de CC.
o Variadores de velocidad por corrientes de Eddy.
o Variadores de deslizamiento.
o Variadores para motores de CA (tambin conocidos como variadores de
frecuencia).
3.2.1. TIPOS DE VARIADORES ELCTRICO-ELECTRNICOS.
Los variadores elctrico-electrnicos incluyen tanto el controlador como
el motor elctrico, sin embargo es prctica comn emplear el trmino variador
nicamente al controlador elctrico.
Los primeros variadores de esta categora emplearon la tecnologa de los tubos
de vaco. Con los aos despus se han ido incorporando dispositivos de estado
slido, lo cual ha reducido significativamente el volumen y costo, mejorando la
eficiencia y confiabilidad de los dispositivos.
3.2.2. VARIADORES PARA MOTORES DE CC.
Graf. N23 controlador de velocidad en corriente continua serie
Proyecto de titulacin.
Pgina 50
Carrera Profesional de Electrotecnia Industrial.
Estos variadores permiten controlar la velocidad de motores de corriente
continua serie, derivacin, compuesto y de imanes permanentes. Para el caso
de cualquiera de las mquinas anteriores se cumple la siguiente expresin:
Vt = K.FM.Nm
Dnde:
= Voltaje terminal (V).
= constante de la mquina.
= Flujo magntico producido por el campo (Wb)
=Velocidad mecnica (rpm).
Despejando la velocidad mecnica, se obtiene:
Vt
K . FM
Entonces, de (2) puede observarse que la velocidad mecnica de un motor de
CC es directamente proporcional al voltaje terminal (VT) e inversamente
proporcional al flujo magntico (FM), el cual a su vez depende de la corriente
Proyecto de titulacin.
Pgina 51
Carrera Profesional de Electrotecnia Industrial.
de campo (IF). Aprovechando esta situacin es que este tipo de variadores
puede controlar la velocidad de un motor de CC: controlando su voltaje
terminal, o bien, manipulando el valor de la corriente de campo.
3.2.3. VARIADORES POR CORRIENTES DE EDDY.
Un variador de velocidad por corrientes de Eddy consta de un motor de
velocidad fija y un embrague de corrientes de Eddy. El embrague contiene un
rotor de velocidad fija (acoplado al motor) y un rotor de velocidad variable,
separados por un pequeo entrehierro. Se cuenta, adems, con una bobina de
campo, cuya corriente puede ser regulada, la cual produce un campo
magntico que determinar el par mecnico transmitido del rotor de entrada al
rotor de salida. De esta forma, a mayor intensidad de campo magntico, mayor
par y velocidad transmitidos, y a menor campo magntico menores sern el par
y la velocidad en el rotor de salida. El control de la velocidad de salida de este
tipo de variadores generalmente se realiza por medio de lazo cerrado,
utilizando como elemento de retroalimentacin un tacmetro de CA.
3.2.4. VARIADORES DE DESLIZAMIENTO.
Este tipo de variadores se aplica nicamente para los motores de
induccin de rotor devanado. En cualquier motor de induccin, la velocidad
mecnica (nM) puede determinarse mediante la siguiente expresin:
Donde s es el deslizamiento del motor, cuyo valor oscila entre 0 y 1. De esta
forma, a mayor deslizamiento, menor velocidad mecnica del motor. El
deslizamiento puede incrementarse al aumentar la resistencia del devanado del
rotor, o bien, al reducir el voltaje en el devanado del rotor. De esta forma es que
puede conseguirse el control de la velocidad en los motores de induccin de
Proyecto de titulacin.
Pgina 52
Carrera Profesional de Electrotecnia Industrial.
rotor devanado. Sin embargo, este tipo de variadores es de menor eficiencia
que otros, razn por la cual en la actualidad tiene muy poca aplicacin.
3.2.5. VARIADORES PARA MOTORES DE CA.
Los variadores de frecuencia (siglas AFD ,del ingls Adjustable
Frecuency Drive; o bien VFD Variable Frecuency Drive) permiten controlar la
velocidad tanto de motores de induccin (asncronos de jaula de ardilla o
de rotor devanado), como de los motores sncronos mediante el ajuste de la
frecuencia de alimentacin al motor. Para el caso de un motor sncrono, la
velocidad se determina mediante la siguiente expresin:
Cuando se trata de motores de induccin, se tiene:
Como puede verse en las expresiones (4) y (5), la frecuencia y la velocidad son
directamente proporcionales, de tal manera que al aumentar la frecuencia de
alimentacin al motor, se incrementar la velocidad de la flecha, y al reducir el
valor de la frecuencia disminuir la velocidad del eje. Por ello es que este tipo
de variadores manipula la frecuencia de alimentacin al motor a fin de obtener
el control de la velocidad de la mquina.
Estos variadores mantienen la razn Voltaje/ Frecuencia (V/Hz) constante entre
los valores mnimo y mximos de la frecuencia de operacin, con la finalidad de
evitar la saturacin magntica del ncleo del motor y adems porque el hecho
de operar el motor a un voltaje constante por encima de una frecuencia dada
(reduciendo la relacin V/Hz) disminuye el par del motor y la capacidad del
mismo para proporcionar potencia constante de salida.
Proyecto de titulacin.
Pgina 53
Carrera Profesional de Electrotecnia Industrial.
3.3.0. VARIADOR DE FRECUENCIA.
Graf. N24 equipo variador de frecuencia
.
DEFINICION: El Variadores de frecuencia: se trata de dispositivos electrnicos,
que permiten el control completo de motores elctricos de induccin; los hay de
c.c. (variacin de la tensin), y de c.a. (variacin de la frecuencia); los ms
utilizados son los de motor trifsico de induccin y rotor sin bobinar. Una de las
serias limitaciones del motor de induccin es la de tener velocidades fijas sin
posibilidades de variacin como lo permite un motor de corriente directa; siendo
que los procesos y aplicaciones requieren diferentes velocidades y torques, se
han desarrollado una infinidad de mtodos para cambiar y variar las
velocidades de placa de los motores de induccin, pero o bien la eficiencia es
baja o el costo del equipo y mantenimiento es alto. Uno de estos mtodos es el
variador de frecuencia (VDF) y aqu veremos cules son las ventajas de este
mtodo por sobre los dems en determinadas aplicaciones. La principal ventaja
de los VDF es la posibilidad de disminuir los consumos de energa elctrica en
algunos de los procesos que controla, dando como resultado considerables
disminuciones en los costos de operacin. La alta confiabilidad en los VDF y la
disminucin de los precios en los mismos han permitido que cada da se
instalen ms equipos en Mxico y en todo el mundo; debido a esto y otras
ventajas adicionales que ms adelante se comentarn en este curso, es
necesario para cualquier persona involucrada con el mantenimiento elctrico, y
el ahorro de energa en el sector elctrico llegar a conocer y entender los
Proyecto de titulacin.
Pgina 54
Carrera Profesional de Electrotecnia Industrial.
principios bsicos del funcionamiento y aplicaciones de los VDF. El desarrollo e
investigacin en el campo de la electrnica de potencia para el control y
variacin de velocidad en los motores de C.A. ha aumentado ms rpidamente
que en el de C.D. por las ventajas que se obtienen.
CARACTERSTICAS DE OPERACIN DE UN VARIADOR DEFRECUENCIA.
El variador de frecuencia variable es conocido con diferentes nombres;
variadores de velocidad, drive, inversor, etc.; pero el nombre correcto es el de
variador de frecuencia pues incorpora el trmino de frecuencia que es lo
correcto en este caso, pues variadores de velocidad lo son la mayora aunque
la variacin la hagan por mtodos mecnicos o por C.D., e inversores solo se
refiere a uno de los pasos del VDF. La manera como un VDF convierte voltaje y
frecuencia constante en voltaje y frecuencia variable se basa en un proceso de
3 pasos principales. Primero la corriente alterna es rectificada y convertida a
voltaje de corriente continua, despus la invierte y vuelve a entregar corriente
alterna pero con valores de frecuencia y voltaje variables. El suministro de
voltaje de un VDF puede realizarse a frecuencias que van desde 0 hz hasta
300 o ms Hz; por lo tanto la velocidad del motor es variable en la misma
proporcin que la variacin de la frecuencia, as el motor puede girar lento o
muy rpido dependiendo de la frecuencia que le suministra el VDF. Al mismo
tiempo el voltaje tambin es variable en la misma proporcin que la variacin
de la frecuencia para asegurar que la relacin voltaje/frecuencia se mantenga
con el mismo valor en todo el rango de velocidades mientras no pase de 60 Hz.
Esto es porque el par que entrega el motor segn diseo es determinado por
esta relacin y un motor de 460 volts tendr una relacin volt/frec de 7.6, si
este mismo motor lo manejamos a una frecuencia de 30 Hz. tendremos que
suministrarle un voltaje de 230 volts para mantener la misma relacin yel
mismo par. Cualquier cambio en esta relacin puede afectar el par,
temperatura, velocidad o el ruido del mismo.
Graf. N25 voltaje/frecuencia se mantienes al mismo tiempo
Proyecto de titulacin.
Pgina 55
Carrera Profesional de Electrotecnia Industrial.
Por lo que se deduce que para producir el par nominal en cada motor a
diferentes velocidades, es necesario modificar el voltaje suministrado conforme
modificamos
la
frecuencia.
El
VDF
mantiene
esa
relacin
de
volt/hertz suministrada al motor de manera automtica.
3.3.1. PARTES DEL VARIADOR DE FRECUENCIA.
Graf. N26 Estructura general de un variador de velocidad elctrica
Bsicamente todos los variadores de frecuencia estn formador por tres
partes principales.
1.- RECTIFICADOR DE C.D.- La parte rectificadora en el VDF convierte
el voltaje en C.A. en voltaje en C.D. que es ms fcil internamente para el VFD
para generar la frecuencia variable de salida necesaria de una fuente no
alterna de voltaje, dependiendo del tipo de VDF este voltaje de C.D. puede ser
fijo o variable. La mayora de los VDF manufacturados actualmente son del tipo
Proyecto de titulacin.
Pgina 56
Carrera Profesional de Electrotecnia Industrial.
de modulacin del ancho del pulso (PWM por sus siglas en ingls) que operan
con un voltaje en C.D. suavizado. Los diodos de potencia son usados para
producir el voltaje de C.D. fijo y los rectificadores controlados de silicio (SCRs
por sus siglas en ingls) son usados para el de voltaje de C.D. variable. Es
importante hacer notar que el voltaje del bus de c.d. es 1.41veces mayor al
voltaje de c.a. pues toma el valor del pico de voltaje y no el voltaje rms, por lo
que el voltaje en bus de c.d. de un VDF de 460 volts ser de 648 v.c.d.
2.-FILTRO ENLACE.- El cual dependiendo del tipo de variador, es
como est conformado; tambin se denomina a esta parte bus de corriente
directa.
3.-INVERSOR.- Como se mencionaba, este es slo uno de los pasos del
VDF y no representa la funcin total del mismo. En esta seccin el voltaje en
c.d. se invierte y vuelve a tomar la forma alterna por medio de rectificadores
controlados de silicio o transistores de potencia conectados directamente al bus
de c.d. y controlados por microprocesadores, pero esta vez con una frecuencia
y voltaje variables. Esta generacin trifsica de c.a. al hacerse a travs de
aperturas instantneas de los transistores aunque tiene ciclos positivos y
negativos toma una forma cuadrtica e interrumpida similar a la alimentacin
de entrada simulando la onda senoidal, segn las necesidades de frecuencia
pero que mantiene la misma relacin volts/Hertz para el motor, a esta
tecnologa se le llama modulacin del ancho del pulso. (Pulse Width Modulation
PWM por sus siglas en ingls). Una tarjeta lgica de microprocesadores
determina la frecuencia de conmutacin de la seccin de inversin, permitiendo
un rango amplio de frecuencias de salida al motor, que van desde 0 hasta 300
Hz o ms Hertz.
Proyecto de titulacin.
Pgina 57
Carrera Profesional de Electrotecnia Industrial.
Graf. N27 Principio de operacin de modulacin del ancho del pulso
3.3.2. TIPOS DE VARIADORES DE FRECUENCIA.
De acuerdo con la tecnologa utilizada, los arreglos de sus componentes
y los componentes utilizados, son varios los tipos de variadores de frecuencia
que existen, bsicamente existen tres tipos, CSI, inversin de la corriente de
alimentacin (CurrentSourceInverter), VSI, inversin del voltaje de alimentacin
(Voltaje SourceInverter) y PWM, Modulacin de Ancho de Pulso (Pulse
WidthModulation), Aunque los ms utilizados son estos ltimos; por lo que
hablaremos solamente de estos.
3.3.3. VARIADOR TIPO MODULACIN DEL ANCHO DEL PULSO (PWM).
La "Modulacin del ancho del pulso" (PWM) ha sido la tecnologa ms
usada en los VDF pues ha dado buenos resultados para controlar motores
desde 1/4 h.p. hasta 1000 h.p. debido a su confiabilidad, adaptacin y porque
genera la menor cantidad de armnicos a la lnea. Aproximadamente 100
fabricantes
trabajan
con esta
tecnologa
a nivel
mundial En
esta tecnologa la seccin de inversin es realizada por un puente de diodos y
capacitores de C.D. para crear y mantener un voltaje estable y suavizado en
C.D. Esta operacin se realiza usando la tecnologa de transistores bipolares
de compuerta aislada (isolated gate bipolar transistor IGBT por sus siglas en
ingls) los cuales regulan el voltaje y frecuencia para simular un voltaje que
aunque es cuadrtico es muy similar al senoidal. El mismo trmino "modulacin
del ancho del pulso" explica cmo cada transicin de voltaje alterno es una
serie de pulsos cortos de diferente ancho. Variando el ancho del pulso en cada
ciclo el promedio simula la onda senoidal. El nmero de transiciones del
positivo al negativo por segundo determina la frecuencia suministrada al motor.
Proyecto de titulacin.
Pgina 58
Carrera Profesional de Electrotecnia Industrial.
Al tener un mayor nmero de pulsos en cada medio ciclo, el ruido asociado a
los motores controlados por VDF se reduce, al igual que la onda de corriente es
suavizada y se eliminan los picos. Las velocidades de switcheo o de resolucin
de los IGBT`s en un convertidor PWM pueden tener rangos desde 2 khz hasta
18 o ms khz. Las ventajas de este mtodo es un excelente factor de potencia
debido al voltaje del bus de C.D. suavizado, no hay disfunciones en
la operacin del motor a bajas velocidades, tiene una eficiencia mayor al 92 %,
puede controlar varios motores con un solo VDF, habilidad para sobreponerse a
las prdidas de potencia en frecuencias de 3 a 5 Hz, y un costo bajo. Entre las
desventajas, y hay que considerarlas es el calentamiento del motor y fallas en
el aislamiento en algunas aplicaciones debido a la alta frecuencia de
resolucin, y la imposibilidad de regeneracin; as como generacin de
armnicas en la lnea, en algunas aplicaciones muy especficas.
Graf. N28 Diagrama esquemtico del variador tipo modulacin del ancho
del pulso (PWM).
3.3.4. VARIADORES TIPO FLUJO VECTORIAL.
Existe una tecnologa que aunque usa los principios de la modulacin
del ancho de pulso ha sido mejorada con microprocesadores de 32 bits
llamados inteligentes y que son usados en los Variadores de Flujo Vectorial o
Vector Drives en ingls. Los variadores de C.A. siempre han estado limitados a
aplicaciones de par normal mientras que las de alto par, y bajas rpm han sido el
dominio de los de C.D. Esto ha ido cambiando recientemente con la
Proyecto de titulacin.
Pgina 59
Carrera Profesional de Electrotecnia Industrial.
introduccin de una nueva generacin de la tecnologa PWM, el variador de
flujo vectorial.
El mtodo de control de par usado en el VDF de flujo vectorial es similar al
usado en los de C.D., incluyendo un amplio rango de velocidades con una
rpida respuesta. Este variador tiene la misma seccin de potencia que los
PWM, pero usa un sofisticado control de lazo cerrado del motor al
microprocesador del variador de frecuencia. La posicin y velocidad del rotor es
monitoreada en tiempo real a travs de un posicionador o codificador digital
que determina y controla la velocidad, par y potencia del motor. Al controlar la
seccin de inversin en respuesta a las condiciones actuales de la carga en
tiempo real, se obtiene un control excelente del par. Las ventajas de este tipo
de variador son: un excelente control de velocidad, par y potencia, una
respuesta rpida a los cambios de carga, velocidad y par demandados; 100 %
de par a velocidad 0; costos de mantenimiento relativamente bajos comparados
con los controles y motores de C.D. El objetivo es controlar el par del motor en
lugar de la velocidad y por lo tanto tienen respuestas ms rpidas y precisas a
las variaciones del par demandado por la carga. Para lograr esto, el variador
explora al motor haciendo un auto reconocimiento (autotuning), inyectndole
corriente y voltaje para saber cmo se comporta y cules son sus valores
caractersticas, para crear un algoritmo o modelo de sus caractersticas de
funcionamiento y poder controlarlo de la manera ms adecuada. Esto se puede
hacer con carga y sin carga del motor; una vez hecho esto se configura en la
memoria del VDF un modelo matemtico del motor con el que se va a trabajar
guardndolo inclusive cuando se desconecta totalmente. Durante la operacin,
el modelo recibe la informacin de la corriente en alterna que el motor
demanda en sus3 fases, los valores de voltaje del bus de C.D. adems del
estado de los switch de potencia. Con estos datos se calcula el flujo en el
estator, el par, la frecuencia y la velocidad de cada ciclo; y hay un ciclo cada
10milisegundos. Adems de esto el modelo estima la resistencia en el estator;
este valor lo obtiene comparando los datos obtenidos de la identificacin
inicial y en la subsecuente operacin del mismo. La diferencia en el mdulo de
inversin comparada con la tecnologa PWM bsica es que, esta tiene una
frecuencia de conmutacin o comnmente switcheo fijada de acuerdo a las
Proyecto de titulacin.
Pgina 60
Carrera Profesional de Electrotecnia Industrial.
necesidades, mientras que en los variadores recientes esta frecuencia de
switcheo se modifica de acuerdo con las necesidades de par de la carga, en
este tipo de variadores se sigue usando la tecnologa de IGBT. Este tipo de
variadores de frecuencia es ideal para aplicaciones de una complejidad mayor
que generalmente se controlan con motores de C.D. como extrusoras, gras,
elevadores, mquinas centrfugas, mquinas de papel, impresoras, maquinaria
de embalaje, embobinadoras, y otras aplicaciones con requerimientos
similares. Entre las ventajas de esta tecnologa es eliminar el sobrecosto de los
elementos de retroalimentacin o codificacin que en la mayora de los casos
representan del 20 al 30 % del costo de la inversin. Otra de las ventajas es
una velocidad de respuesta mayor a los cambios de velocidad y par que los
dems variadores incluyendo al de flujo vectorial, 100 % de par a velocidad 0;
as como par constante en todo el rango de velocidades. En todas las
aplicaciones de VDF hay que tener muy presentes el calentamiento que pueda
llegar a sufrir el motor al disminuir la velocidad del ventilador de enfriamiento
acoplado al mismo en la parte posterior. Si el motor va a trabajar en rangos de
velocidad de 0 a 15-20 Hz durante lapsos prolongados, se recomienda instalar
ventilacin extra a la del motor para asegurar el enfriamiento adecuado;
algunas marcas manejan el motor con ventilacin acoplada pero conectada
elctricamente independiente a un alimentador de 120 volts. El VDF ha llegado
a ser uno de los mtodos de control de motores que ms han avanzado
tecnolgicamente en los ltimos aos, disminuyendo costos, tamaos y
mejorando la simplicidad de operacin y ha llegado a normalizarse tanto que
casi todas las marcas ofrecen las mismas caractersticas de operacin; al
incluir la electrnica de potencia en base a microprocesadores como el
fundamento de operacin, las ventajas adicionales que ofrecen algunas marcas
son mnimas con respecto a otras pero que deben de ser consideradas al
momento de hacer la eleccin: como el idioma de programacin y lectura;
facilidad de programacin; datos que aporta el equipo como amperaje, %
de par, potencia, voltajes, status, etc.; pantallas remotas; reactores de choque
para disminuir armnicos; desconectadores internos; fusibles de accin rpida
integrados; control PID ;etc. Lo que realmente hace la diferencia entre un
equipo y otro es la calidad de los componentes que lo integran y el servicio pre
y posventa del mismo.
Proyecto de titulacin.
Pgina 61
Carrera Profesional de Electrotecnia Industrial.
3.3.5 VARIADORES DE FRECUENCIA QUE NO PRODUCEN ARMNICAS.
Actualmente la tecnologa en la fabricacin de variadores de frecuencia
para media y baja tensin, lleva ya varios aos desarrollando variadores de
frecuencia que producen bajos contenidos de armnicas tanto hacia el motor
como hacia la lnea de alimentacin. Estos variadores de frecuencia,
adems de proporcionar los beneficios del control de la velocidad y el ahorro de
energa, no provocan distorsiones a la lnea de alimentacin ni daos al motor.
Por lo cual, para su aplicacin no es necesario degradar la potencia del motor
ni sobredimensionar el aislamiento del cable o del motor, para el caso de media
tensin. La forma como se consigue eliminar las armnicas es instalando
transformadores de alimentacin con devanados secundarios aislados entre si
y desfasados de cierta forma, que las armnicas se eliminan entre ellas.
Graf. N29 lazo de control de velocidad y lazo de control de torque
Proyecto de titulacin.
Pgina 62
Carrera Profesional de Electrotecnia Industrial.
3.3.6. APLICACIONES INDUSTRIALES DE LOS VARIADORES DE
FRECUENCIA.
Los variadores de velocidad tienen una amplia gama de aplicaciones,
de aqu que las principales industrias donde se utilizan los variadores de
velocidad son las siguientes:
Metalrgicas: Chapas y laminados, perfiles de hierro, aluminio, cables,
torneras, electrodomsticos, revestimiento de caos, fundiciones,
fresadoras, electrodos, etc.
Alimenticias: Los variadores de frecuencia tiene gran acogida en la
industria alimenticia como panificadoras, galletas, pastas secas, pastas
frescas, chocolates, golosinas, lcteos, azcar, margarinas, frigorficos,
quesos, grasas animales, molinos harineros, mantecas, criaderos de
pollos, aceiteras, frutcolas, jugueras, aguas minerales, bodegas
vitivincolas, cerveceras, productos balanceados, etc.
Construccin: Edificios, autopistas, cementeras, tejas, azulejos, pisos,
ladrillos, bloques, fibrocemento, pretensados, aberturas, sanitarios,
membranas asflticas, caleras, arenas especiales, etc.
Automovilsticas: La industria automovilstica utiliza los variadores de
frecuencia en montadoras de autos, montadoras de camiones, mnibus,
auto partes, tapizados, plsticos, radiadores, neumticos, rectificadora
de motores, etc.
Plsticos: Perfiles, poliestireno, telgopor, impresoras, envases, juguetes,
muebles, bolsas, etc.
Papeleras: Papel, cartn, corrugados, cajas, papel higinico, bobinas,
bolsas, envases, etc.
Cueros: Curtiembres, tintoreras, cuerinas, calzados, ropas, etc.
Proyecto de titulacin.
Pgina 63
Carrera Profesional de Electrotecnia Industrial.
Qumicas: Laboratorios medicinales, pintureras, adhesivos, detergentes,
jabones,
explosivos,
acrlicos,
anilinas,
insecticidas,
fertilizantes,
petroqumicas, etc.
Petroleras: Petrleos, refineras, lubricantes, destileras, etc.
Textiles: Tejidos, tintoreras, lavaderos, hilanderas, etc.
Madereras: Aserraderos, muebles, impregnadoras, laminados, tableros,
terciados, etc.
Caucho: Neumticos, gomas, ltex, etc.
Otras: Aeronuticas, tabacaleras, vidrio, aguas sanitarias, cerealeras,
universidades, empresas de ingeniera, minera, aceras, agropecuarias,
preparadores de vehculos de competicin, etc.
3.3.7. ELEMENTOS DE PROTECCIN Y MONITOREO.
Los variadores de velocidad aseguran tanto la proteccin trmica de los
motores como su propia proteccin. A partir de la medida de la corriente y de
una informacin sobre la velocidad, un microprocesador calcula la elevacin de
temperatura de un motor y suministra una seal de alarma o de desconexin
en caso de calentamiento excesivo. Adems, los variadores, y especialmente
los convertidores de frecuencia, estn dotados de protecciones contra:
Cortocircuitos entre fases y; entre fase y tierra.
Sobretensiones y las cadas de tensin.
Desequilibrios de fases.
Funcionamiento en monofsico,
Proyecto de titulacin.
Pgina 64
Carrera Profesional de Electrotecnia Industrial.
3.3.8. ESTRUCTURA Y COMPONENTES DE LOS VARIADORES
ELECTRNICOS.
Se componen de dos mdulos generalmente montados en una misma
envolvente:
Un mdulo de control del funcionamiento del aparato.
Un mdulo de potencia que alimenta el motor con energa elctrica.
a) MDULO DE CONTROL: Todas las funciones se controlan mediante un
microprocesador que gestiona la configuracin, las rdenes transmitidas
por las medidas como velocidad, corriente, etc.
El microprocesador gestiona las rampas de aceleracin y
desaceleracin, el control de la velocidad y la limitacin de
corriente, generando las seales de control de los componentes
de potencia.
Los lmites de velocidad, las rampas, los lmites de corriente y
otros datos de configuracin se definen utilizando un teclado
integrado o mediante PLC o mediante PC.
Del mismo modo los diferentes comandos (marcha, parada,
frenado), pueden proporcionarse mediante interfaces de dilogo
hombre/mquina, utilizando autmatas programables o PC.
Los parmetros de funcionamiento y las informaciones de alarma,
y los defectos pueden verse mediante displays, diodos LED, etc.
b) MDULO DE POTENCIA: El mdulo de potencia est principalmente
constituido por:
Componentes de potencia (tiristores, diodos).
Interfaces de medida de las tensiones y/o corrientes.
En aparatos de gran calibre, un conjunto de ventilacin.
Graf. N30 Estructura general de un variador de frecuencia elctrico.
Proyecto de titulacin.
Pgina 65
Carrera Profesional de Electrotecnia Industrial.
3.3.9. TIPOS DE CARGAS.
a) PAR Y POTENCIA.
Hay que aclarar que la potencia y el par son dos valores diferentes y que nos
indican dos caractersticas del motor independientes; mientras que el par es un
sistema formado por dos fuerzas que obran sobre lneas de accin paralelas no
coloniales y son iguales y de sentido opuesto y que producen o impiden una
rotacin; la potencia se define como el trabajo realizado en la unidad de tiempo,
y las dos se relacionan y rigen, hablando de motores por la siguiente ecuacin:
POTENCIA (HP) = PAR ( KG-M ) X RPM / 7124.
b) CARGAS DE PAR CONSTANTE.
Es la carga que demanda del motor un par o torque constante en
cualquier rango de velocidad; ejemplos de este tipo de carga son elevadores,
bandas
transportadoras,
maquinaria
textil,
impresoras,
bombas
de
desplazamiento positivo y de pistn, extrusoras, mezcladoras, compresores
reciprocantes, etc.; y representan el 80 % de los motores instalados. En este
tipo de carga el motivo principal para la aplicacin de los VDF es la
optimizacin del proceso y rara vez hay ahorros de energa; a menos de que se
cumplan estas dos condiciones: que la potencia demandada sea menor a la
nominal y que esto sea a velocidades menores.
Proyecto de titulacin.
Pgina 66
Carrera Profesional de Electrotecnia Industrial.
Graf. N31 Curva de par y potencia para una carga de par constante.
c) CARGAS DE PAR VARIABLE.
Es el tipo de carga en la cual las necesidades de par o torque van
disminuyendo conforme la velocidad del motor y por consiguiente de la carga
tambin disminuyet. Este tipo de carga se encuentra comnmente en
aplicaciones de flujo variable, como bombas y ventiladores centrfugos.
Ejemplos de estos son los ventiladores y bombas centrfugas, agitadores
y compresores axiales; y el VDF ofrece grandes oportunidades de ahorro pues
sus requerimientos de potencia disminuyen considerablemente conforme la
velocidad es menor.
Graf. N32 Curva de par y potencia para una carga de par variable.
Proyecto de titulacin.
Pgina 67
Carrera Profesional de Electrotecnia Industrial.
d) CARGAS DE POTENCIA CONSTANTE.
Es el tipo de carga, que no importa la velocidad a la que est girando el
motor pues siempre va a estar demandando la potencia mxima, pues as lo
demanda la carga. Sin embargo, al incrementarse la velocidad, la demanda de
par se reduce y viceversa. Estas cargas se encuentran bsicamente en
mquinas herramientas, bobinadoras, dobladoras, troqueladoras, molinos,
bombas centrfugas de alta inercia; en estas cargas difcilmente podremos
obtener ahorros de energa, debido a que el proceso exige el mximo de la
potencia o en todo caso KW. Como es de vital importancia conocer el tipo de
aplicacin donde queremos instalar un variador de frecuencia; tambin es
importante conocer algunos otros datos que nos ayudarn a hacer la eleccin
correcta y evitar errores que nos pueden costar dinero y tiempo. Es importante
conocer los rangos de velocidades en los que va a trabajar nuestra carga; a
que porcentaje de carga est trabajando si es implementacin de variador en
un proceso ya establecido, cual es la potencia mxima y mnima que la carga
demanda, que par necesitamos al arranque, etc. Estos datos se conocen
a travs de la informacin tcnica proporcionada por los fabricantes de los
equipos ya travs de mediciones realizadas en campo si es el caso de que el
equipo ya est funcionando y queramos determinar los porcentajes de carga a
la que est trabajando; y una vez conocindolos dimensionar exactamente las
capacidades de nuestros equipos para determinar qu es lo que necesitamos y
que nuestro sistema trabaje con la mejor eficiencia posible. Muchas de las
aplicaciones de velocidad variable utilizan reductores despus del motor debido
a las necesidades de velocidades bajas y pares altos; ya sea que la reduccin
se haga por medios mecnicos como engranes, poleas, bandas, etc., es
necesario tomar en cuenta las relaciones de reduccin y considerar el motor y
el reductor exacto para el caso especfico.
Proyecto de titulacin.
Pgina 68
Carrera Profesional de Electrotecnia Industrial.
Graf. N33 Curva par potencia para una carga de potencia constante.
3.4.0. AHORRO DE ENERGA CON VARIADORES DE FRECUENCIA.
3.4.1 AHORRO DE ENERGA EN CARGAS DE PAR VARIABLE.
Debido a que la aplicacin de VDF en los procesos de par variable son
los que nos dan un mayor ahorro de energa, en este captulo veremos cules
son las caractersticas y por qu del ahorro en este tipo de cargas. Como ya
vimos las cargas de par variable son las que involucran movimientos de fluidos
como agua y aire, y el mayor nmero de estas aplicaciones son bombas y
ventiladores centrfugos. Se considera por los potenciales de ahorro de energa
que el 70% de las aplicaciones de los accionamientos de velocidad variable
son en este tipo de cargas. Primero veremos cules son las leyes que rigen
estos sistemas y que nos permiten tener ahorros de energa en velocidades
menores a las nominales. En cualquier sistema de movimientos de fluidos por
medio de impulsores centrfugos que en este caso puede ser un ventilador o
una bomba; el caudal Q , que es un valor dado en volumen por unidad de
tiempo siempre va a estar relacionado proporcionalmente a la velocidad del
impulsor; por ejemplo si un ventilador centrfugo que gira a 3600 rpm mueve
una cantidad de 2 M de aire por segundo, ese mismo ventilador al girarlo a
1800rpm mover una cantidad de aire de 1 M de aire por segundo, sin
importar que es lo que est haciendo girar el ventilador. Ahora este caudal que
es proporcional a la velocidad es impulsado a diferentes presiones segn
cambie la velocidad y la presin es un valor dado en fuerza aplicada por unidad
Proyecto de titulacin.
Pgina 69
Carrera Profesional de Electrotecnia Industrial.
de rea y se comporta de una manera cuadrtica conforme cambia la
velocidad:( rpm a ) (Rpm b) Utilizando el mismo caso anterior si suponemos
que la presin del aire impulsado a 3600 rpm tiene una presin de 1 kg-m2,
cuando est a 1800 rpm tendr una presin de 0.25 kg-m2, pues su
disminucin no es Ahora para realizar este trabajo nosotros necesitamos
determinada potencia para producir ese caudal concierta presin, ya sea que
nosotros realicemos ese trabajo por medios mecnicos o elctricos, la
demanda de potencia va ser la misma para procesos similares. Y la demanda
de esta potencia se va a comportar de una manera cbica.
En el caso anterior suponiendo que la potencia demandada para tener un
caudal Qa
de 2
M con
una
presin de
1kg- m es
de 10
kw; la
potencia necesaria para tener un caudal Qb de 1 M con una presin de 0.25
kg-m sera de 1.25 kW. Estas disminuciones de potencia demandada en una
relacin cuadrtica son las que nos permiten tener ahorros de energa en las
cargas de par variable a velocidades menores a las nominales; y los VFD son
los nicos equipos que nos pueden dar diferentes velocidades segn sean las
demandadas. En un sistema de manejo de fluidos no tendra ninguna ventaja
instalar Convertidor de Frecuencia Variable si las necesidades de caudal y
presin no tuvieran variaciones, y siempre se requiriesen las mximas
condiciones de trabajo; pero generalmente los sistemas de bombeo e inyeccin
de aire se disean originalmente considerando el punto mximo de operacin.
Todas las partes involucradas en el diseo como: tuberas, impulsores,
motores, vlvulas, tanques, tambin se encuentran diseados para abastecer
el volumen mximo requerido. Considerando lo anterior, y que la mayora de
los sistemas tienen variaciones de demanda, se requiere de un sistema de
control para regular continuamente el volumen del caudal de acuerdo a las
necesidades. Por lo general el promedio del caudal movido, puede ser una
fraccin de la capacidad mxima del sistema. El control de caudal se puede
regular de diferentes maneras usando algunos de los siguientes mtodos:
recirculacin, persianas, vlvula de estrangulacin, cajas de volumen variable,
control de arranque/paro y convertidores de frecuencia. Los mtodos que
implican poco ahorro de energa seran los de recirculacin y arranque/paro,
mientras que los mtodos de control de obturador o estrangulamiento, que son
Proyecto de titulacin.
Pgina 70
Carrera Profesional de Electrotecnia Industrial.
los ms usados pero su eficiencia es muy baja, la disminucin en los consumos
de energa es casi insignificante, pues el motor contina trabajando a su
velocidad
nominal
tratando
de
sobreponerse
las
contrapresiones
innecesarias. He aqu donde el VDF sustituye a cualquier tipo de control con
grandes ventajas; y es el nico que reduce la velocidad del equipo sin
necesidades de elementos mecnicos extras; los ahorros que se obtienen de la
operacin son mayores y pueden llegar al 60 %.
3.4.2. AHORRO DE ENERGA CON CARGAS DE PAR CONSTANTE.
Como se mencion anteriormente, en una aplicacin de par constante
tambin es factible ahorrar energa elctrica durante el arranque y la operacin,
siempre y cuando se tengan variaciones en la carga y/o el equipo no se
encuentre operando a su capacidad nominal. Pongamos el ejemplo de una
banda transportadora de material pesado. Las bandas siempre se dimensionan
para transportar la mxima capacidad a la que fue diseada, por lo tanto el
motor en determinadas ocasiones va trabajar sobrado pues no siempre va a
transportar la mxima carga, e inclusive sin carga pues no se les alimenta de
material regularmente; en esos momentos si la velocidad baja el consumo de
potencia va a disminuir conforme a lo solicitado por la carga. Una banda medio
cargada consume slo un poco menos de energa que una completamente
llena. Una banda parcialmente cargada puede consumir hasta el 80 % de la
energa necesaria para transportar la carga completa. Esta relacin se
empeora si la banda va vaca, pues consume del 50 al 70 % de la energa
requerida para la carga nominal, de tal forma que aunque no est realizando
ningn trabajo ni suministrando material hay consumo de energa y un
desperdicio del 50 % de la energa instalada. Con un VDF se logra ajustar
la velocidad de la banda al material disponible en un momento dado.
Regulando la velocidad en base al factor de carga. Vindolo de otra manera si
la cantidad del material por transportar disminuye a la mitad; la velocidad de
la banda disminuira a la mitad; y si la cantidad de material disminuye de tal
forma que la banda va vaca, la velocidad de la banda se reduce hasta un
mnimo con el correspondiente ahorro de energa.
Proyecto de titulacin.
Pgina 71
Carrera Profesional de Electrotecnia Industrial.
Graf. N34 Torque de un motor controlado por variador de frecuencia.
APLICACIN DE LA LEY CBICA.
En general en la industria, los procesos requieren de cierta flexibilidad ya que
no operan siempre a carga constante, sino que se deben satisfacer
necesidades variables dentro de un rango mximo y mnimo de flujos. Estos
flujos pueden ser: combustible, agua, materia prima, aire y otros fluidos. Como
medio de control de flujo se utilizan ampliamente las vlvulas de estrangulacin
o vlvulas de control cuyo principio de control se basa en provocar una cada
de presin mayor o menor del flujo a travs de ella. Un mtodo alternativo para
control de flujo es mediante la variacin de velocidad directamente en el
equipo, por ejemplo, en una bomba.
Proyecto de titulacin.
Pgina 72
Carrera Profesional de Electrotecnia Industrial.
CAPITUTLO VI
4.1.0. VARIADOR LS INDUSTRIAL.
Graf. N35 equipo variador lS industrial de un motor 1hp
Graf. N36 diagrama de bloques
4.1.1. VARIADOR DE FRECUENCIA IG5A, 220VAC, 1HP, 5A.
Estos variadores estn controlados por microprocesador y utilizan tecnologa
IGBT de ltima generacin. Esto los hace fiables y verstiles. Un mtodo
especial de modulacin por ancho de impulsos con frecuencia de pulsacin
seleccionable permite un funcionamiento silencioso del motor. Extensas
Proyecto de titulacin.
Pgina 73
Carrera Profesional de Electrotecnia Industrial.
funciones de seguridad ofrecen una proteccin excelente tanto del convertidor
como del motor.
4.1.2. CARACTERSTICAS DEL VARIADOR IG5A, 220VAC, 1HP, 5A.
Cdigo / Modelo de producto: SV008iG5A-2
Marca: LS Industrial Systems
Lnea: Variadores de Velocidad
Sub lnea: Variadores
APLICACIN: El variador iG5A es un variador multiprsito capaz de operar
prcticamente en
cualquier
aplicacin
de
1HP.
Algunas aplicaciones tpicas son las siguientes:
Cargas con torque de arranque variable:
Sistemas de bombeo a presin constante.
Aire acondicionado.
Puertas automticas.
Cargas con alto torque de arranque:
Tornillos transportadores.
Fajas transportadoras.
Gras puente.
Elevadores.
Molinos.
Mquinas herramienta
4.1.3. DATOS TCNICOS
Alimentacin: 200~230VAC(+10%,-15%)Trifsica
Potencia: 1HP
Capacidad de sobrecarga:
150% por 60 segundos
200% por 30 segundos
Mtodo de Control Configurable:
Escalar (Bombas y ventiladores).
Proyecto de titulacin.
Pgina 74
Carrera Profesional de Electrotecnia Industrial.
Vectorial (Cargas de alto torque).
Frecuencia:
Entrada: 50 - 60Hz, +/-5%.
Salida: 0 - 400Hz (portadora de 1-15kHz).
Temperatura de trabajo: -10C a 50C
Interfaz
de
usuario:
Panel frontal con controles de arranque/parada y potencimetro digital.
Entradas / Salidas:
8 entradas digitales (NPN PNP).
2 entradas analgicas configurables (-10 a +10VDC, 0 a 20mA).
2 salidas digitales (1 rel, 1 colector abierto).
1 salida analgica multifuncin 0-10VDC.
1 Salida de alimentacin de 24VDC.
a) FUNCIONES:
Arranque y parada suave.
Rampa controlada tipo S.
Reconocimiento automtico del motor (auto tuning).
Frenado dinmico.
Control de proceso PID avanzado.
JOG.
Cambio de giro.
Mltiples rampas de aceleracin.
Rearranque automtico.
Multivelocidades.
Arranque al vuelo.
Saltos de frecuencia.
Compensacin de deslizamiento.
Memorizacin de alarmas y estados.
Proyecto de titulacin.
Pgina 75
Carrera Profesional de Electrotecnia Industrial.
Autodiagnstico del variador.
Proteccin de parmetros mediante contrasea.
Amplificacin de torque.
Autodiagnstico.
Apagado/encendido automticos (Sleep y Wake).
Configuracin de segundo motor.
Conexionado de resistencia de frenado
b) PROTECCIONES:
Sobrevoltaje.
Bajo voltaje.
Sobrecorriente.
Falla a tierra.
Sobre temperatura (variador & motor).
Prdida de fase en entrada.
Prdida de fase en salida.
Sobrecarga.
Prevencin de atascamiento.
Error de comunicacin.
Prdida de frecuencia.
Falla de hardware.
Ventilacin OK.
Sobrecarga en condensadores (DC LINK),
Historial de fallas
c) VARIABLES DE MONITOREO:
Frecuencia de salida.
Corriente de salida.
Tensin de salida.
Proyecto de titulacin.
Pgina 76
Carrera Profesional de Electrotecnia Industrial.
Torque de salida.
RPM del motor.
Tensin del bus DC.
Potencia del motor.
Estado de entradas digitales.
Estado de salidas digitales.
d) COMUNICACIN:
Puerto RS485.
Protocolo ModBus RTU integrado.
e) DIMENSIONES:
70mm (Ancho) x 128mm (Alto) x 130mm (Prof.)
4.1.4. DISEO Y CONSTRUCCIN DEL MDULO DE VARIADOR DE
VELOCIDAD.
Para el diseo y construccin del mdulo de variador de velocidad, para los
motores asincrnicos jaula de ardilla trifsicos, se ha tomado en cuenta que,
debe ser o estar constituido de tal forma que facilite el aprendizaje e ilustre
claramente las partes ms importantes del tema en estudio, como tambin que
este se acople perfectamente a los mdulos que se encuentran en el
laboratorio de la carrera profesional de electrotecnia industrial , tomando en
cuenta las normas establecidas para la instalacin de los diferentes dispositivos
elctricoselectrnicos.
El diagrama de bloques de la estructura. Se establece un orden de
conexin de los dispositivos, los mismos que sern estudiados y
justificados el porqu de su utilizacin, por tal motivo se realiz un
diagrama de bloques que nos sirve de gua para la instalacin de los
equipos y su estudio.
Proyecto de titulacin.
Pgina 77
Carrera Profesional de Electrotecnia Industrial.
Fuente de alimentacin. El Laboratorio de electrnica, cuenta con
mdulos con su propia fuente de alimentacin de corriente alterna AC,
para nuestro fin utilizaremos 220V AC que ser necesario para poner en
funcionamiento el mdulo de variador de velocidad.
4.2.0. ANEXO.
4.2.1. CARACTERSTICAS TCNICAS DE MANUAL DEL VARIADOR DE
FRECUENCIAS.
Precauciones importantes del variador de frecuencias. Para verificar que
la unidad sea la correcta para la aplicacin deseada compruebe el tipo de
variador, el rgimen de salida en la placa de identificacin y que el variador
est intacto.
Proyecto de titulacin.
Pgina 78
Carrera Profesional de Electrotecnia Industrial.
4.2.2. PREPARACIN
DE
INSTRUMENTOS
PIEZAS
PARA
LA
OPERACIN.
Los instrumentos y las piezas a preparar dependen del modo en que se
operar el variador. Prepare el equipo y las piezas segn resulte necesario.
INSTALACIN.
Para operar el variador con elevado desempeo durante mucho tiempo
instlelo en un lugar apropiado, en la direccin correcta y con el despeje
adecuado.
CONEXIONADO.
Proyecto de titulacin.
Pgina 79
Carrera Profesional de Electrotecnia Industrial.
Conecte la fuente de alimentacin, el motor y las seales de operacin
(seales de control) a la bornera. Tenga en cuenta que una conexin incorrecta
puede daar el variador y los dispositivos perifricos.
PARTES DEL VARIADOR.
Apariencia fsica
Proyecto de titulacin.
Pgina 80
Carrera Profesional de Electrotecnia Industrial.
VISTA DEL INTERIOR DESPUES DE RETIRAR LA CUBIERTA
FRONTAL.
Proyecto de titulacin.
Pgina 81
Carrera Profesional de Electrotecnia Industrial.
4.2.3. CONEXIONADO DE LOS BORNES (ENTRADA/ SALIDA).
Proyecto de titulacin.
Pgina 82
Carrera Profesional de Electrotecnia Industrial.
CONEXIONADO DE LOS BORNES DE ALIMENTACION (0.4 a
7.5KW).
4.2.3. SELECCIN DE PNP/NPN Y CONECTOR PARA LA OPCION DE
COMUNICACIN.
Proyecto de titulacin.
Pgina 83
Carrera Profesional de Electrotecnia Industrial.
a) CUANDO SE USA VARIADOR INTERNO DE 24VCC (NPN).
b) CUANDO SE USA ALIMENTACION EXTERNA DE 24VCC
(PNP).
Proyecto de titulacin.
Pgina 84
Carrera Profesional de Electrotecnia Industrial.
INFORMACION BASICA
Proyecto de titulacin.
Pgina 85
Carrera Profesional de Electrotecnia Industrial.
4.2.4. TECLADO DE PROGRAMACION Y OPERACIN BASICA
CARACTERISTICAS DEL TECLADO.
TECLAS
VISOR
FWD
Encendido durante el avance
Prpadea cuando ocurre un
RUN
Comando de funcionamiento
REV
Encendido durante el retroceso fallo
STOP/RESET
STOP: Comando para detener el funcionamiento
RUN
Encendido
durante
el
RESET: Comando para reposicin cuando se produce un
funcionamiento
fallo
SET
Encendido durante la definicin
Subir
Permite desplazarse por los cdigos o aumentar el valor de un
de parmetros
parmetro
7 segmentos Muestran el estado de funcionamiento e informacin de los
Bajar
Permite desplazarse por los cdigos o reducir el valor de un
parmetros
parmetro
Izquierda
Permite saltar a otros grupos de parmetros o mover el cursor a
la izquierda para cambiar el valor de un parmetro
Derecha
Permite saltar a otros grupos de parmetros o mover el cursor a
la derecha para cambiar el valor de un parmetro
Intro
Permite definir el valor de un parmetro o guardar el valor
modificado del parmetro
Proyecto de titulacin.
Pgina 86
Carrera Profesional de Electrotecnia Industrial.
4.2.5. VISUALIZACION ALFANUMERICA EN EL TECLADO DE LED
4.2.6. DESPLAZAMIENTO A OTROS GRUPOS.
HAY CUATRO GRUPOS DE PARMETROS DIFERENTES EN EL
GRUPO SERIE SV-IG5A, MOSTRADOS A CONTINUACIN.
Proyecto de titulacin.
Pgina 87
Carrera Profesional de Electrotecnia Industrial.
Grupo
de Parmetros bsicos necesarios para que el variador
accionamiento
funcione. Pueden definirse parmetros como la frecuencia
de referencia y el tiempo de aceleracin/desaceleracin.
Grupo
de Parmetros de funciones bsicas para ajustar la frecuencia
funciones 1
Grupo
y la tensin de salida.
de Parmetros de funciones avanzadas para definir parmetros
funciones 2
como la operacin PID y la operacin de un segundo motor.
Grupo E/S
Parmetros necesarios para constituir una secuencia
(Entrada/Salida) usando los bornes de entrada/salida multifuncin.
EL DESPLAZAMIENTO A LOS OTROS GRUPOS DEPARMETROS.
Slo est disponible en el primer cdigo de cada grupo, como se
muestra en la siguiente figura.
Desplazamiento a los otros grupos usando la tecla Derecha ()
Desplazamiento a los otros grupos usando la tecla Izquierda ()
Proyecto de titulacin.
Pgina 88
Carrera Profesional de Electrotecnia Industrial.
La frecuencia de referencia se puede definirse 0.0 el primer cdigo del grupo
de accionamiento
El valor predefinido es 0.0, pero puede ser modificado
por el usuario. Se
visualizara la nueva frecuencia despus de haber sido modificada.
COMO DESPLAZARSE A LOS OTROS GRUPOS DESDE EL PRIMER
CDIGO DE CADA GRUPO.
Si usa la tecla con la flecha a la izquierda (t), los pasos anteriores se ejecutarn
en el orden inverso.
Proyecto de titulacin.
Pgina 89
Carrera Profesional de Electrotecnia Industrial.
COMO DESPLAZARSE A LOS OTROS GRUPOS DESDE
CUALQUIER CDIGO EXCEPTO EL PRIMERO.
Para desplazarse del cdigo F15 al grupo de funciones 2
4.3.0. COMO CAMBIAR CDIGOS EN UN GRUPO.
4.3.1. CAMBIO DE CDIGO EN EL GRUPO DE ACCIONAMIENTO.
Proyecto de titulacin.
Pgina 90
Carrera Profesional de Electrotecnia Industrial.
SALTO DE CDIGO Para desplazarse del cdigo F 0 al cdigo F15
directamente
El grupo de funciones 2 y el grupo E/ S se define con los mismos pasos.
4.3.2. NAVEGACIN POR LOS CDIGOS DENTRO DE UN GRUPO.
Para desplazarse del cdigo F 1 al cdigo F15 en el grupo de funciones 1
Proyecto de titulacin.
Pgina 91
Carrera Profesional de Electrotecnia Industrial.
Nota: Algunos cdigos sern salteados durante los incrementos (P) /
decrementos () para cambiar de cdigo. Esto se debe a que se
program dejar intencionalmente en blanco algunos cdigos para uso
futuro o a que los cdigos que el usuario no usa son invisibles.
Consulte detalles ms especficos en el Captulo 5.
Por
ejemplo,
cuando
el
cdigo
F24
[Seleccin
del
lmite
superior/inferior de frecuencia] est definido en "O (No)" no se
visualizan F25 [Lmite superior de frecuencia] ni F26 [Lmite inferior de
frecuencia] durante el cambio de cdigo. Pero cuando F24 est
definido en "1 (S)", F25 y F26 aparecen en el visor.
4.4.0. DEFINICION DE LOS PARAMETROS.
4.4.1 CAMBIO DE LOS VALORES DE PARMETROS EN EL GRUPO DE
ACCIONAMIENTO.
Para cambiar el tiempo ACC de 5.0 seg. A 16.0 seg.
En el paso 7, si pulsa las teclas Izquierda (t) o Derecha () mientras 16.0
Proyecto de titulacin.
Pgina 92
Carrera Profesional de Electrotecnia Industrial.
parpadea se inhabilitar la definicin del parmetro.
Nota 1) Si pulsa las teclas Izquierda (t) / Derecha () / Subir (P) / Bajar ()
mientras el cursor parpadea se cancelar el cambio del valor del
parmetro. Pulsando la tecla Intro () en este estado se ingresar el valor
en la memoria.
a) DEFINICIN DE LA FRECUENCIA.
Para cambiar la frecuencia de operacin a 30,05Hz en el grupo de
accionamiento
Proyecto de titulacin.
Pgina 93
Carrera Profesional de Electrotecnia Industrial.
El visor del SV-iG5A puede extenderse a 5 dgitos usando las teclas
Izquierda (t) / Derecha ().
La definicin de los parmetros se inhabilita pulsando cualquier otra tecla que
no sea Intro en el paso 7.
b) CAMBIO DE LOS VALORES DE PARMETROS EN EL GRUPO
E/S.
Para cambiar el valor del parmetro de F28 de 2 a 5
Proyecto de titulacin.
Pgina 94
Carrera Profesional de Electrotecnia Industrial.
La definicin anterior tambin se aplica para cambiar los parmetros en los
grupos de funciones 2 y E/S.
4.5.0. MONITOREO DEL ESTADO DE OPERACIN.
4.5.1 VISUALIZACIN DE LA CORRIENTE DE SALIDA.
Monitoreo de la corriente de salida en el grupo de accionamiento
Con este mismo mtodo pueden monitorearse otros parmetros en el grupo de
accionamiento, como dCL (Tensin de la conexin de CC del variador) o vOL
(Tensin de salida del variador).
Proyecto de titulacin.
Pgina 95
Carrera Profesional de Electrotecnia Industrial.
1) VISUALIZACION DE FALLOS
Como monitorear una condicin de fallo en el grupo de accionamiento
Proyecto de titulacin.
Pgina 96
Carrera Profesional de Electrotecnia Industrial.
2) INICIALIZACION DE LOS PARAMETROS
Como inicializar los parmetros de los cuatro grupos en H93
Proyecto de titulacin.
Pgina 97
Carrera Profesional de Electrotecnia Industrial.
4.5.2. DEFINICIN DE LA FRECUENCIA Y OPERACIN BSICA.
Las siguientes instrucciones asumen que todos los parmetros estn definidos
en los valores por defecto de fbrica. Los resultados podran ser distintos si los
valores fueron modificados. En tal caso inicialice (ver pgina 8-42) a los valores
por defecto de fbrica y siga las instrucciones.
Definicin de la frecuencia con el teclado y los bornes
4.5.3. DEFINICION DE LA FRECUENCIA CON EL POTENCIOMETRO
Proyecto de titulacin.
Pgina 98
Carrera Profesional de Electrotecnia Industrial.
Proyecto de titulacin.
Pgina 99
Carrera Profesional de Electrotecnia Industrial.
4.6.0. DEFINICION DE LA FRECUENCIA CON EL POTENCIOMETRO Y LA
TECLA RUN
Proyecto de titulacin.
Pgina 100
Carrera Profesional de Electrotecnia Industrial.
4.6.1. DIAGRAMA DE BLOQUES DE CONTROL.
Proyecto de titulacin.
Pgina 101
Carrera Profesional de Electrotecnia Industrial.
DEFINICION DE LA FRECUENCIA
Proyecto de titulacin.
Pgina 102
Carrera Profesional de Electrotecnia Industrial.
DEFINICION DEL COMANDO DE ACCIONAMIENTO
Proyecto de titulacin.
Pgina 103
Carrera Profesional de Electrotecnia Industrial.
ACELERACION/DESACELERACION Y CONTROL V/F
Proyecto de titulacin.
Pgina 104
Carrera Profesional de Electrotecnia Industrial.
4.6.2. FUNCIONES BSICAS.
MODO DE FRECUENCIA; Definicin 1 de la frecuencia desde el teclado
Grupo
Cdigo
Nombre
del Definicin Rango Inicial Unida
parmetro
Grupo
de 0.00
[Comando
accionamie
d
de -
0~400 0.00
Hz
frecuencia]
nto
Frq
[Modo de frecuencia] 0
0~8
Defina Frq - [Modo de frecuencia] en 0 {Definicin 1 de la frecuencia
desde el teclado}.
Defina la frecuencia deseada en 0.00 y pulse la tecla Intro () para entrar
el valor en la memoria.
El valor puede definirse en un valor inferior a F21 - [Frecuencia mxima
Cuando el teclado remoto est conectado, las teclas del teclado en la
carcasa se desactivan.
Definicin 2 de la frecuencia desde el teclado
Grupo
Cdigo
Grupo
de 0.00
accionamient
Nombre
del Definici Rango
parmetro
[Comando
de -
Inicial Unida
d
0~400
0.00
0~8
Hz
frecuencia]
o
Frq
[Modo de frecuencia] 1
Defina Frq - [Modo de frecuencia] en 1 {Definicin 2 de la frecuencia
con el teclado}.
Proyecto de titulacin.
Pgina 105
Carrera Profesional de Electrotecnia Industrial.
En 0.00, la frecuencia cambia al pulsar la tecla Subir (P) /
Bajar (). En este caso, las teclas Subir/Bajar sirven como
potencimetro.
El valor puede definirse en un ajuste inferior a F21 - [Frecuencia
mxima].
Cuando el teclado remoto est conectado, las teclas del teclado en la
carcasa se desactivan.
Definicin de la frecuencia con la entrada de V]
-10~+10
Grupo
Grupo
Cdig Nombre del parmetro
Definici Rango
de 0.00
Inicial
Unida
d
[Comando de frecuencia]
0~400
0.00
Hz
Frq
[Modo de frecuencia]
0~8
I2
[Tensin mnima de la -
0~-10
0.0
0~400
0.00
Hz
0~10
10.00
0~400
60.00
Hz
accionamie
nto
Grupo E/S
entrada NV]
I3
[Frecuencia
correspondiente a I2]
I4
[Tensin mxima de la entrada NV]
I5
[Frecuencia
correspondiente a I4]
I6~I10 [Entrada V1]
Defina Frq - [Modo de frecuencia] en 2.
La frecuencia definida puede monitorearse en 0.00 - [Comando de
frecuencia].
Proyecto de titulacin.
Pgina 106
Carrera Profesional de Electrotecnia Industrial.
o
Aplique la seal de -10V~+10V entre los bornes V1 y CM.
Frecuencia de salida correspondiente a -10V~+10V de tensin de entrada
al borne V1
Definicin de rango de entrada y frecuencia correspondiente a la
tensin de entrada V1 10V~0V
Ej.) Cuando la tensin de entrada (-) mnima es -2V con la
frecuencia correspondiente de 10Hz y la tensin mxima es 8V con la frecuencia de funcionamiento de 50Hz.
Proyecto de titulacin.
Pgina 107
Carrera Profesional de Electrotecnia Industrial.
Definicin de rango de entrada y frecuencia correspondiente a la
tensin de entrada V1 0~+10V
Ej.) Cuando la tensin de entrada (+) mnima es 2V con la
frecuencia correspondiente de 10Hz y la tensin mxima es
8V con la frecuencia de funcionamiento.
Proyecto de titulacin.
Pgina 108
Carrera Profesional de Electrotecnia Industrial.
CONCLUSIONES.
Los motores que durante dcadas las industrias estaban ocupando son
los motores de corriente continua. Sin embargo los motores con menor
nivel de exigencias en el mantenimiento son los motores asncronos de
jaula de ardilla, debido a que carecen de colector, tienen una relacin
peso-potencia mucho menor que los de continua, y por tanto un costo
significativamente ms bajo. Por esta razn pasaron a ser los ms
utilizados en procesos industriales.
En la actualidad la demanda de controles elctricos industriales
automatizados empleando la electrnica de potencia ha ido aumentando
progresivamente, la capacitacin de los tcnicos debe cambiar de
acuerdo a la tecnologa, para brindar un desarrollo complementario a la
preparacin acadmica impartida.
El control de velocidad de un motor se realiza mediante el cambio de
frecuencia que realiza el VFD, es decir el variador de velocidad recibe
una tensin trifsica a una frecuencia fija y a su salida se obtiene una
tensin trifsica a una frecuencia variable. La configuracin ms usada
es: rectificador de onda completa o de Graetzinversor.
Con la realizacin del mdulo aplicado a la industria el estudiante cuenta
con una gua para manejar el VFD y as tendr una visin clara de
posibles aplicaciones con esos dispositivos, pudiendo ahorrar tiempo en
el desarrollo de dichas aplicaciones.
El variador de velocidad LG iG5 controla los motores asncronos
incluyendo el motor de induccin tipo "jaula de ardilla" que es el motor
ms econmico, simple y robusto que hay y se distingue por ser el ms
usado en la industria por estas ventajas. Es el nico control que
energiza, protege y permite la variacin de la velocidad en el motor, sin
ningn accesorio extra entre el motor y la carga.
Uno de los dispositivos ms sofisticados que cuenta el mercado actual
es el variador de velocidad LG iG5 ya que brinda mltiples funciones en
su programacin, las cuales pueden ser la solucin a diferentes
problemas que se presenten en aplicaciones que usen motores.
El variador de velocidad LG iG5 es flexible en cuanto a su alimentacin
ya que puede trabajar con una red monofsica o trifsica, y esta es una
caracterstica muy importante dentro de una industria.
Proyecto de titulacin.
Pgina 109
Carrera Profesional de Electrotecnia Industrial.
El VFD ha llegado a reemplazar a contactores, rels, arrancadores,
temporizadores y circuitos de proteccin, puesto que cumple con todas
stas funciones y an ms los parmetros de estas funciones son
programables.
Proyecto de titulacin.
Pgina 110
Carrera Profesional de Electrotecnia Industrial.
RECOMENDACIONES.
La principal y ms importante recomendacin que nos indica el
fabricante del Variador de Velocidad LG iG5 es que se debe tener
cuidado de no conectar las terminales de alimentacin (R, S, T) a las
terminales de salida del variador (U, V, W), ya que esta es la principal
causa de daos en estos equipos.
Para una correcta seleccin de un variador de velocidad dentro de un
proceso se debe tomar en cuenta tanto las caractersticas del motor que
se va a utilizar como el funcionamiento del proceso.
Para la instalacin de un variador de frecuencia es necesario conocer
tanto los elementos que se va a disponer para la automatizacin de un
proceso como el funcionamiento de la planta.
Manipular el equipo por personal familiarizado con la puesta en servicio
y operacin para asegurar el funcionamiento correcto del equipo.
Esperar cinco minutos para permitir que se descarguen los
condensadores antes de comenzar cualquier trabajo de instalacin en el
equipo.
Tomar en cuenta que la conexin de los cables de red, del motor y de
mando o control deber realizarse de la forma correcta a fin de evitar
que interferencias de tipo inductivo y capacitivo afecten al correcto
funcionamiento del variador.
Montar en posicin frontal-vertical para asegurar la refrigeracin
necesaria asegurando que las aletas de enfriamiento del convertidor no
estn tapadas ni obstruidas.
Observar que el convertidor est siempre a tierra. Si el convertidor no
est puesto a tierra correctamente se puede destruir el convertidor, as
como producirse altas tensiones peligrosas para las personas. Lo mismo
rige si el convertidor trabaja en redes no puestas a tierra.
Antes de realizar o cambiar conexiones en el mdulo, se debe
desconectar la fuente de alimentacin del equipo.
Proyecto de titulacin.
Pgina 111
Carrera Profesional de Electrotecnia Industrial.
REFERENCIAS BIBLIOGRAFICAS
CHAPMAN, Stephen J.: Maquinas elctricas. Segunda edicin. Mxico,
DF. McGraw-Hill Interamericana de Mxico, S.A. de C.V., 1995.
NASAR UNNEWEHR, Electromecnica y Mquinas Elctricas, tomo 1,4
Editorial Limusa de Mxico, 1997
ENRQUEZ, Gilberto Harper: Control de Motores Elctricos. Primera
Edicin. Mxico, DF. Limusa S.A. de C.V. Grupo Noriega Editores, 1998.
ENRQUEZ, Gilberto Harper: Manual de Electricidad Industrial II,
Reparacin de motores elctricos. Tomo 2. Mxico, DF. Limusa S.A. de
C.V., 1996.
KOSOW, Irving, Mquinas Elctricas y Transformadores, Segunda
edicin, Editorial Prentice Hall Mxico, 1993.
LOBOSCO, Orlando S. y DAZ Jos Luiz P.C.: Seleccin y Aplicacin de
Motores
Elctricos.
Volumen
1.
Barcelona,
Espaa.
Siemens
Aktiengesellschaft Marcombo S.A., 1990.
SMEATON, Robert W.: Motores Elctricos, Seleccin, Mantenimiento y
Reparacin. Segunda Edicin (Primera Edicin en Espaol). Tomo III.
McGraw-Hill Interamericana Editores, S.A. de C.V.
TIPPENS, Paul E.: Fsica, Conceptos y Aplicaciones. Sexta Edicin.
Mxico, DF. McGraw-Hill Interamericana Editores, S.A. de C.V., 2001.
Proyecto de titulacin.
Pgina 112
Carrera Profesional de Electrotecnia Industrial.
REFERENCIAS BIBLIOGRAFICAS PAGINAS WEB
http://www.angelfire.com/sk3/todoarchivos0/archivos/Eficiencia
en
Motores electricos.p df, Ing. Cip Eduardo Tiravanti. Eficiencia Energtica
En Motores Elctricos
http://www.ersp.gob.pa/electric/info clientes/Motores.pdf, Gua Para La
Proteccin De Motores Elctricos.
http://www.fulp.ulpgc.es/articulos/vector22 01.pdf, Unin Elctrica De
Canarias, S.A. Anlisis De Los Motores Elctricos
http://usuarios.lycos.es/mugresoft/caracteristicas
particulares.htm,
Carnegie Mellon University. Variadores De Velocidad.
http://members.tripod.com/JaimeVp/Electricidad/Arranque
de
motores.htm. Arranque De Motores
http://www.dliengineering.com/vibman-spanish/motoresainduccin.htm,
DLI Watchman. Motores a Induccin
http://www.dliengineering.com/vibmanspanish/motoreselctricosacorrientealternaca.htm,
DLI
Watchman.
Motores Elctricos a Corriente Alterna
http://www.carbi.net/tecnica/newpage14.html,
Alfonso
Perales.
VARIADORES ELECTRNICOS
http://www.calormatica.cl/sumi001.htm, Calormtica Ltda. Calor y
Automatizacin. Suministros y Componentes
http://www.astrogea.org/alasala/variador.htm, AstroGea. Caractersticas
Tcnicas Del Variador De Frecuencia Programable
Proyecto de titulacin.
Pgina 113
Carrera Profesional de Electrotecnia Industrial.
ANEXOS
Armado de tablero fuerza y control
Vista frontal del variador LS IG5A
Proyecto de titulacin.
Conexiones de entrada y salida
Pgina 114
Carrera Profesional de Electrotecnia Industrial.
Partes del variador LS IG5A
circuito de fuerza y entradas auxiliares
Bloque de tarjeta etapa de potencia
Algunos tipos de variadores LS Industrial
Proyecto de titulacin.
Pgina 115
Carrera Profesional de Electrotecnia Industrial.
Circuito equivalente
Transistor IGBT
Funcionamiento del transistor IGBT
Proyecto de titulacin.
Pgina 116
S-ar putea să vă placă și
- Prehistoria 1 Las Primeras Etapas de La HumanidadDocument10 paginiPrehistoria 1 Las Primeras Etapas de La HumanidadholaÎncă nu există evaluări
- Proyecto Variador de FrecuenciaDocument18 paginiProyecto Variador de Frecuenciadiego baltazarÎncă nu există evaluări
- Seminario de Variadores de FrecuenciaDocument254 paginiSeminario de Variadores de Frecuenciaevrodriguez_1971100% (8)
- Variadores de FrecuenciaDocument33 paginiVariadores de FrecuenciaJuan Antonio100% (3)
- Principios Generales de Maquinas EléctricasDocument104 paginiPrincipios Generales de Maquinas EléctricasAlvaro Michel OrozcoÎncă nu există evaluări
- Examen de Recuperacion-02Document4 paginiExamen de Recuperacion-02Tomás Barrientos SaihuaÎncă nu există evaluări
- (Peninsular - Estudios) Pedro Bracamonte y Sosa-La Conquista Inconclusa de Yucatán - Los Mayas de La Montaña, 1560-1680-CIESAS (2001) PDFDocument394 pagini(Peninsular - Estudios) Pedro Bracamonte y Sosa-La Conquista Inconclusa de Yucatán - Los Mayas de La Montaña, 1560-1680-CIESAS (2001) PDFJosé Carlos Gómez50% (4)
- Variadores de Velocidad NuevoDocument257 paginiVariadores de Velocidad NuevoRaúl Padilla Sánchez100% (2)
- Operacion y Mantenimiento de Una Subestacion de Rectificacion en El Sistema de Transporte Electrico Trolebus PDFDocument186 paginiOperacion y Mantenimiento de Una Subestacion de Rectificacion en El Sistema de Transporte Electrico Trolebus PDFPeter GonzalezÎncă nu există evaluări
- Construccion de Un Variador de FrecuenciaDocument14 paginiConstruccion de Un Variador de FrecuenciaJulian Morales100% (1)
- s03 Arranque Motores TrifásicosDocument38 paginis03 Arranque Motores TrifásicosRely Davilmar Limascca Garcia100% (1)
- Variadores de VelocidadDocument7 paginiVariadores de VelocidadLuis Trinidad Mera Acevedo100% (1)
- Dispositivos FACTSDocument63 paginiDispositivos FACTSdavidups1992_25337480% (1)
- Arranque de Motor Con Variador de FrecuenciaDocument16 paginiArranque de Motor Con Variador de FrecuenciaIris Vaca PeñarandaÎncă nu există evaluări
- Jaula de ArdillaDocument8 paginiJaula de ArdillaFernando Don TacoÎncă nu există evaluări
- Weg Variador de FrecuenciaDocument128 paginiWeg Variador de FrecuenciaJorge Perez Pay100% (1)
- Calculo de Espiras Motor TrifásicoDocument6 paginiCalculo de Espiras Motor TrifásicoMechín Rodriguez EjvrÎncă nu există evaluări
- Control de Motores ElectricosDocument64 paginiControl de Motores ElectricosNoe Mexicano Gobantes100% (1)
- Control Velocidad Motor DC Con PicDocument9 paginiControl Velocidad Motor DC Con PicJose Callupe VargasÎncă nu există evaluări
- CONVERTIDOR de AC AC PresentacionDocument5 paginiCONVERTIDOR de AC AC PresentacionAlvaro RicaldiÎncă nu există evaluări
- Bobinado de MotoresDocument27 paginiBobinado de MotoresAnonymous px6Tz9KP100% (1)
- WEG Cfw11 Referencia Rapida de Los Parametros 10001800333 5.1x Guia Rapido EspanolDocument167 paginiWEG Cfw11 Referencia Rapida de Los Parametros 10001800333 5.1x Guia Rapido EspanolFrancisco PuertaÎncă nu există evaluări
- Accionamientos Electrico en CCDocument14 paginiAccionamientos Electrico en CCGinner SantiagoÎncă nu există evaluări
- Sistema de Bombeo de Agua Con Variadores de VelocidadDocument261 paginiSistema de Bombeo de Agua Con Variadores de Velocidadinstalroca66440% (1)
- Conexión de Motores TrifasicosDocument16 paginiConexión de Motores Trifasicosjoshe003Încă nu există evaluări
- Taller 11 VariadoresDocument30 paginiTaller 11 VariadoresSantiago Arroyave CañaveralÎncă nu există evaluări
- Arranque de Motores Estrella TrianguloDocument3 paginiArranque de Motores Estrella TrianguloshenseyÎncă nu există evaluări
- Motores TrifásicosDocument15 paginiMotores TrifásicosRodri VelizÎncă nu există evaluări
- Interruptores DiferencialesDocument4 paginiInterruptores DiferencialesPablo González de PazÎncă nu există evaluări
- Sensor MagneticoDocument5 paginiSensor MagneticoWilliam Llantoy RojasÎncă nu există evaluări
- Motores EléctricosDocument89 paginiMotores EléctricosEduardo Daniel100% (5)
- Variadores de FrecuenciaDocument31 paginiVariadores de FrecuenciaJuan Jose GuerreroÎncă nu există evaluări
- Servomotores de CADocument31 paginiServomotores de CAPablo Davila80% (5)
- EncoderDocument8 paginiEncoderDanielaÎncă nu există evaluări
- EXPERIMENTO DE LABORATORIO No3 PDFDocument6 paginiEXPERIMENTO DE LABORATORIO No3 PDFDavid RodriguezÎncă nu există evaluări
- Guía Laboratorio Variador de Velocidad ALTIVAR 11 1 1Document19 paginiGuía Laboratorio Variador de Velocidad ALTIVAR 11 1 1Jose David JaimesÎncă nu există evaluări
- Tesis Protecciones SistelecDocument116 paginiTesis Protecciones Sisteleceder samaniegoÎncă nu există evaluări
- Variadores de VelocidadDocument40 paginiVariadores de VelocidadAlan Patrick0% (1)
- El Variador de FrecuenciaDocument46 paginiEl Variador de FrecuenciaMax100% (2)
- Arrancadores EstaticosDocument5 paginiArrancadores EstaticosMarco Chahuayo GarcíaÎncă nu există evaluări
- Analisis de Un Variador de FrecuenciaDocument4 paginiAnalisis de Un Variador de FrecuenciaBoris Fernando Criollo EncaladaÎncă nu există evaluări
- Variadores de FrecuenciaDocument9 paginiVariadores de FrecuenciaDaniel Cámara-ChiÎncă nu există evaluări
- Variadores de VelocidadDocument16 paginiVariadores de VelocidadAlex GuamánÎncă nu există evaluări
- Variador de FrecuenciaDocument28 paginiVariador de FrecuenciaOrlando Pinto GonzalezÎncă nu există evaluări
- Ensayo Variadores de FrecuenciaDocument3 paginiEnsayo Variadores de FrecuenciagabydiaÎncă nu există evaluări
- Tema 4 - Variadores de Frecuencia PDFDocument23 paginiTema 4 - Variadores de Frecuencia PDFJonathn Ortega LescanoÎncă nu există evaluări
- RECTIFICADORESDocument8 paginiRECTIFICADORESVictor_PunkerÎncă nu există evaluări
- Variador de Frecuencia CFW100Document42 paginiVariador de Frecuencia CFW100Omar Sam SucaÎncă nu există evaluări
- Arrancadores de Motores A Plena TensiónDocument6 paginiArrancadores de Motores A Plena TensiónAquiles VergaraÎncă nu există evaluări
- Topologia e Varidores de Frecuencia de Media Tensión PDFDocument14 paginiTopologia e Varidores de Frecuencia de Media Tensión PDFiCOLAB - Gte IngenieriaÎncă nu există evaluări
- Variador de Frecuencia 1Document59 paginiVariador de Frecuencia 1Diego HCabanillaÎncă nu există evaluări
- Banco de Prueba de MotoresDocument94 paginiBanco de Prueba de MotoresEdna López0% (1)
- 10 Controladores Ac - AcDocument24 pagini10 Controladores Ac - Acbryan eduardo villegas carrascoÎncă nu există evaluări
- Tesis - Diseño, e Implementacion de Un Variador de Frecuencia para Motores de Inducción TrifasicaDocument173 paginiTesis - Diseño, e Implementacion de Un Variador de Frecuencia para Motores de Inducción TrifasicaDenis MirandaÎncă nu există evaluări
- 06 - Regulacion de Velocidad (Motores CA)Document15 pagini06 - Regulacion de Velocidad (Motores CA)lobonortinoÎncă nu există evaluări
- Inst PlantaDocument85 paginiInst PlantaJesús GonzálezÎncă nu există evaluări
- PPPÑPDocument23 paginiPPPÑPfernandoÎncă nu există evaluări
- Tesis Final Final de Grado PDFDocument149 paginiTesis Final Final de Grado PDFJhonatan GusquiÎncă nu există evaluări
- Tesis Grado 2 PDFDocument23 paginiTesis Grado 2 PDFfernandoÎncă nu există evaluări
- IEuprcaDocument123 paginiIEuprcafrancoÎncă nu există evaluări
- Informe Final de Practicas Pre Profesionales 2Document34 paginiInforme Final de Practicas Pre Profesionales 2Omar Quispe MolinaÎncă nu există evaluări
- Proyecto de PIS (2.0)Document26 paginiProyecto de PIS (2.0)estalin morochoÎncă nu există evaluări
- Guía de instalación para viviendasDe la EverandGuía de instalación para viviendasEvaluare: 5 din 5 stele5/5 (1)
- Examen de Equipos e Instrumentos de MedicionDocument7 paginiExamen de Equipos e Instrumentos de MedicionTomás Barrientos SaihuaÎncă nu există evaluări
- Electronica Digital-Sistema de NumeracionDocument5 paginiElectronica Digital-Sistema de NumeracionTomás Barrientos SaihuaÎncă nu există evaluări
- Ejercicios de HidrodinamicaDocument10 paginiEjercicios de HidrodinamicaTomás Barrientos SaihuaÎncă nu există evaluări
- Catálogo Bomba Centrífuga D PEDROLLODocument4 paginiCatálogo Bomba Centrífuga D PEDROLLOMeza Sutterland MiguelangelÎncă nu există evaluări
- 12 - Control de Proceso AutomatizadoDocument15 pagini12 - Control de Proceso Automatizadopoludo10Încă nu există evaluări
- 12 - Control de Proceso AutomatizadoDocument15 pagini12 - Control de Proceso Automatizadopoludo10Încă nu există evaluări
- 11 - AutomatasDocument47 pagini11 - AutomatasFreddy SarabiaÎncă nu există evaluări
- Medidas ElectricasDocument31 paginiMedidas ElectricasTomás Barrientos SaihuaÎncă nu există evaluări
- UD08 ElectronicaDocument20 paginiUD08 ElectronicaTomás Barrientos SaihuaÎncă nu există evaluări
- Caracteristicas de La TicDocument1 paginăCaracteristicas de La TicTomás Barrientos SaihuaÎncă nu există evaluări
- Informacion de AutomatasDocument14 paginiInformacion de AutomatasTomás Barrientos SaihuaÎncă nu există evaluări
- Bases de Juegos Deportivos 2017Document10 paginiBases de Juegos Deportivos 2017Tomás Barrientos SaihuaÎncă nu există evaluări
- 12 - Control de Proceso AutomatizadoDocument15 pagini12 - Control de Proceso Automatizadopoludo10Încă nu există evaluări
- 12 - Control de Proceso AutomatizadoDocument15 pagini12 - Control de Proceso Automatizadopoludo10Încă nu există evaluări
- Lineamientos Académicos Generales Institutos PDFDocument68 paginiLineamientos Académicos Generales Institutos PDFTomás Barrientos SaihuaÎncă nu există evaluări
- Conceptos Fundamentales de ElectricidadDocument24 paginiConceptos Fundamentales de ElectricidadJunior Gamboa TapiaÎncă nu există evaluări
- TEIQPractica12y4 2008Document40 paginiTEIQPractica12y4 2008Issis Milly EspinosaÎncă nu există evaluări
- Modulo I 08-2017Document7 paginiModulo I 08-2017Tomás Barrientos SaihuaÎncă nu există evaluări
- Silabo III Sem CoDocument20 paginiSilabo III Sem CoTomás Barrientos SaihuaÎncă nu există evaluări
- Itinerario Ei 12 - Set - 2017Document8 paginiItinerario Ei 12 - Set - 2017Tomás Barrientos SaihuaÎncă nu există evaluări
- Programación UD12 (Neumática) PDFDocument3 paginiProgramación UD12 (Neumática) PDFwilson alejandroÎncă nu există evaluări
- Modulo II 08-2017Document8 paginiModulo II 08-2017Tomás Barrientos SaihuaÎncă nu există evaluări
- Equivalencia de UnidadesDocument1 paginăEquivalencia de UnidadesTomás Barrientos SaihuaÎncă nu există evaluări
- Laboratorios de Tableros de ControlDocument34 paginiLaboratorios de Tableros de ControlTomás Barrientos SaihuaÎncă nu există evaluări
- UD08 ElectronicaDocument20 paginiUD08 ElectronicaTomás Barrientos SaihuaÎncă nu există evaluări
- Reglamento de La Ley #30512 Ley de InstitutosDocument38 paginiReglamento de La Ley #30512 Ley de InstitutosMiranda Becerra JoseÎncă nu există evaluări
- Ficha de Plcs y PerifericosDocument6 paginiFicha de Plcs y PerifericosTomás Barrientos SaihuaÎncă nu există evaluări
- MEDICON de LA PRESION (Modo de Compatibilidad)Document43 paginiMEDICON de LA PRESION (Modo de Compatibilidad)Tomás Barrientos SaihuaÎncă nu există evaluări
- Estrella Tri Angulo 2009Document3 paginiEstrella Tri Angulo 2009Joel Leandro Ibarra CoriaÎncă nu există evaluări
- Entrevista ColaborativaDocument8 paginiEntrevista Colaborativaana milena ortiz vargasÎncă nu există evaluări
- Los Niveles Del ConocimientoDocument2 paginiLos Niveles Del ConocimientoNancyÎncă nu există evaluări
- Ficha Actividad Estud. 3°4° 1 MAYODocument2 paginiFicha Actividad Estud. 3°4° 1 MAYOAntonio Moises Vargas GutierrezÎncă nu există evaluări
- Documento - Benjamin BloomDocument9 paginiDocumento - Benjamin BloomJuan carlos carrascoÎncă nu există evaluări
- Discusión DirigidaDocument21 paginiDiscusión DirigidaIndira Poma ReyesÎncă nu există evaluări
- Nuevo Enfoque Enseñanza QuimicaDocument22 paginiNuevo Enfoque Enseñanza Quimicamolina65100% (1)
- Fichero de Juegos de E.F. para Educacion PrimariaDocument59 paginiFichero de Juegos de E.F. para Educacion PrimariaAndrew PvcÎncă nu există evaluări
- Modelos de Gestión Del Conocimiento para La Educación en LineaDocument11 paginiModelos de Gestión Del Conocimiento para La Educación en LineaCarlos Alberto Altamirano InterianoÎncă nu există evaluări
- Las Chivas LocasDocument19 paginiLas Chivas LocasLiz TorrezÎncă nu există evaluări
- La Construccion y El Cvalor - Del - PatrimoniadknfDocument503 paginiLa Construccion y El Cvalor - Del - PatrimoniadknfIreneAdlerÎncă nu există evaluări
- Programa de Graduación 2022Document6 paginiPrograma de Graduación 2022Verónica Flores VillanuevaÎncă nu există evaluări
- Diagnostico Gestion.-1Document4 paginiDiagnostico Gestion.-18De La Cruz Escalante NeftaliÎncă nu există evaluări
- PertinenciaDocument2 paginiPertinenciaJoselyn Vallejo PizanánÎncă nu există evaluări
- Capacidades LaboralesDocument34 paginiCapacidades LaboralesCristobal Abdias Jove100% (1)
- Esquemas-Competencias y SubcomptDocument40 paginiEsquemas-Competencias y Subcomptliguita11Încă nu există evaluări
- Carta CompromisoDocument2 paginiCarta CompromisoKARLITA2011Încă nu există evaluări
- La Educación Dominicana en El 2017 (Artículo)Document3 paginiLa Educación Dominicana en El 2017 (Artículo)ElizabethÎncă nu există evaluări
- Bion, WR - Turbulencia, Emoción y Turbulencia EmocionalDocument3 paginiBion, WR - Turbulencia, Emoción y Turbulencia Emocionalbasilio andresÎncă nu există evaluări
- Influencia SocialDocument3 paginiInfluencia SocialFabiola DelgadoÎncă nu există evaluări
- 3 - HMB HmeDocument5 pagini3 - HMB HmeRodrigo HurtadoÎncă nu există evaluări
- Inea Secundaria Alfredo JoaquinDocument1 paginăInea Secundaria Alfredo JoaquinFany LaraÎncă nu există evaluări
- Caso Práctico Entornos VirtualesDocument8 paginiCaso Práctico Entornos VirtualesJuan Carlos JaramilloÎncă nu există evaluări
- Estructura1 Material de Estudio CompletoDocument5 paginiEstructura1 Material de Estudio CompletoPaola FernandezÎncă nu există evaluări
- ANEXO 4. Matriz de Fortalezas, Debilidades y Objetivos EstratégicosDocument7 paginiANEXO 4. Matriz de Fortalezas, Debilidades y Objetivos EstratégicosomssÎncă nu există evaluări
- Prueba 5 2013 SeptimoDocument5 paginiPrueba 5 2013 SeptimoModinger Aravena Eda Yacqueline0% (1)
- Niveles Del LenguajeDocument2 paginiNiveles Del LenguajeHdz Monterrey80% (5)
- Copia de SEMANA 13 OBJETIVOS Y MARCO TEÓRICODocument57 paginiCopia de SEMANA 13 OBJETIVOS Y MARCO TEÓRICOcarlos albaÎncă nu există evaluări
- Balotario de Gestion de EmpresasDocument17 paginiBalotario de Gestion de EmpresasYessica NinaÎncă nu există evaluări