S-ar putea să vă placă și
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Volvo: Electrical Wiring DiagramDocument7 paginiVolvo: Electrical Wiring Diagramrusadi100% (5)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Pump CalculationsDocument20 paginiPump CalculationsPRATIK P. BHOIR50% (2)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- 250 Service Manual PDFDocument47 pagini250 Service Manual PDFSnejana Stoianov100% (2)
- MCQ DistributionDocument8 paginiMCQ Distributiongoyal.167009100% (2)
- Cat Dcs Sis ControllerDocument2 paginiCat Dcs Sis ControllerToth Zoltán100% (2)
- E20 Heat Load Calculation SheetDocument1 paginăE20 Heat Load Calculation SheetȘtefan C. Petre50% (2)
- Wa900 8R - Cen00855 00Document20 paginiWa900 8R - Cen00855 00Ahmad Badawi100% (1)
- 325 CLDocument28 pagini325 CLjesus manuel arze carrascoÎncă nu există evaluări
- Theory of Everything Scalar Potential MoDocument459 paginiTheory of Everything Scalar Potential MoSupatmono NAI100% (2)
- LPG Blackmer PumpsDocument16 paginiLPG Blackmer Pumpssizweh100% (1)
- Recovered PDF FileDocument5 paginiRecovered PDF FileSupatmono NAIÎncă nu există evaluări
- WangJinetal BMRI2015 PDFDocument9 paginiWangJinetal BMRI2015 PDFSupatmono NAIÎncă nu există evaluări
- Gems & Minerals Found in Hiddenite, NCDocument1 paginăGems & Minerals Found in Hiddenite, NCSupatmono NAIÎncă nu există evaluări
- Nonionic PDFDocument1 paginăNonionic PDFSupatmono NAIÎncă nu există evaluări
- Chapter Six Aerobic Digestion of W Aste Activated and Primary SludgesDocument32 paginiChapter Six Aerobic Digestion of W Aste Activated and Primary SludgesSupatmono NAIÎncă nu există evaluări
- Online Wastewater Process Monitoring Presentation PDFDocument46 paginiOnline Wastewater Process Monitoring Presentation PDFSupatmono NAIÎncă nu există evaluări
- TorvaptancaseDocument4 paginiTorvaptancaseSupatmono NAIÎncă nu există evaluări
- Comparison MP and LP in Swimming Pools 150610Document2 paginiComparison MP and LP in Swimming Pools 150610Supatmono NAIÎncă nu există evaluări
- Wsec 2017 Fs 024 MRRDC LSF Aeration Design FinalDocument6 paginiWsec 2017 Fs 024 MRRDC LSF Aeration Design FinalSupatmono NAIÎncă nu există evaluări
- Difference Between Industrial Wastewater and Municipal WastewaterDocument11 paginiDifference Between Industrial Wastewater and Municipal WastewaterSupatmono NAIÎncă nu există evaluări
- Aeration Efficiency and Optimization: Tennessee Water Wastewater Utility PartnershipDocument75 paginiAeration Efficiency and Optimization: Tennessee Water Wastewater Utility PartnershipSupatmono NAIÎncă nu există evaluări
- 36 TCC WWsolidsDocument10 pagini36 TCC WWsolidsSupatmono NAIÎncă nu există evaluări
- Bio Media ComparationDocument3 paginiBio Media ComparationSupatmono NAIÎncă nu există evaluări
- True Charge 20 Amp 3 Stage Charger ManualDocument78 paginiTrue Charge 20 Amp 3 Stage Charger ManualElliot Capson100% (1)
- MM435 - CDP-2 - Corrosion CellsDocument24 paginiMM435 - CDP-2 - Corrosion CellsAbdul Ahad ShamsÎncă nu există evaluări
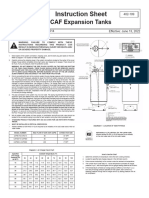
- Taco CAF Expansion Tank Install ManualDocument3 paginiTaco CAF Expansion Tank Install ManualTEMPÎncă nu există evaluări
- Eaton Busure (En)Document16 paginiEaton Busure (En)Danish NasimÎncă nu există evaluări
- 5 Electricity - With GRESADocument15 pagini5 Electricity - With GRESADianne CalladaÎncă nu există evaluări
- Mini Project - MECHDocument19 paginiMini Project - MECHmahendiran123Încă nu există evaluări
- Fire Issue: BNBC 2006 and BNBC 2017 (Upcoming) PDFDocument3 paginiFire Issue: BNBC 2006 and BNBC 2017 (Upcoming) PDFSayemAbusadat100% (1)
- Transformer Interview Questions & Answers: Search For Jobs..Document29 paginiTransformer Interview Questions & Answers: Search For Jobs..shamshadÎncă nu există evaluări
- Inorganic Chemistry STPMDocument113 paginiInorganic Chemistry STPMThilagavathy SethuramahÎncă nu există evaluări
- 32 Direct Acting Normally Closed Valve 17 MMDocument2 pagini32 Direct Acting Normally Closed Valve 17 MMBiswanath LenkaÎncă nu există evaluări
- Tech Spec of PTR 33 11 KVDocument34 paginiTech Spec of PTR 33 11 KVAnonymous sAmJfcVÎncă nu există evaluări
- Micro Scale CFD Modeling of Reactive Mass Transfer in Falling Liquid Films Within Structured Packing MaterialsDocument11 paginiMicro Scale CFD Modeling of Reactive Mass Transfer in Falling Liquid Films Within Structured Packing MaterialsAbdul ZahirÎncă nu există evaluări
- Pipe Section Technical Papers - Aug 28 2009Document8 paginiPipe Section Technical Papers - Aug 28 2009Vân Anh TrầnÎncă nu există evaluări
- Locomotive BoilerDocument32 paginiLocomotive BoilerDr. BIBIN CHIDAMBARANATHANÎncă nu există evaluări
- Project EvsDocument8 paginiProject Evsnaveenkmr04550% (2)
- Alpha, Beta and Gamma RadiationDocument8 paginiAlpha, Beta and Gamma RadiationFarhan SadiqueÎncă nu există evaluări
- Data Sheet P30-2Document4 paginiData Sheet P30-2Vlade NaumovskiÎncă nu există evaluări
- Pcc-Ee 303Document2 paginiPcc-Ee 303Amlan SarkarÎncă nu există evaluări
- The Essential Engineer PDFDocument5 paginiThe Essential Engineer PDFDharmaraj MartynÎncă nu există evaluări
- LM340, LM340A and LM7805 Family Wide V 1.5-A Fixed Voltage RegulatorsDocument34 paginiLM340, LM340A and LM7805 Family Wide V 1.5-A Fixed Voltage RegulatorsJohnson JohnÎncă nu există evaluări
- GROHE Pricelist-2020 en GB PDFDocument1.020 paginiGROHE Pricelist-2020 en GB PDFNikhil AggarwalÎncă nu există evaluări