S-ar putea să vă placă și
- Hacking 101Document47 paginiHacking 101Cleo RubinoÎncă nu există evaluări
- Downloadable Menu PDFDocument2 paginiDownloadable Menu PDFCleo RubinoÎncă nu există evaluări
- Iecep Math PDFDocument5 paginiIecep Math PDFCleo RubinoÎncă nu există evaluări
- EST Super Compiled (IECEP)Document54 paginiEST Super Compiled (IECEP)kurte moyoÎncă nu există evaluări
- AppendicesDocument5 paginiAppendicesCleo RubinoÎncă nu există evaluări
- Mock Board GEAS 2Document12 paginiMock Board GEAS 2Jo CesÎncă nu există evaluări
- Z Transform 2Document28 paginiZ Transform 2arun434Încă nu există evaluări
- Math MODULE 5,6,7: April 2013 Ninja TurtlesDocument227 paginiMath MODULE 5,6,7: April 2013 Ninja TurtlesCleo RubinoÎncă nu există evaluări
- PERC - ElectronicsDocument8 paginiPERC - ElectronicsCleo RubinoÎncă nu există evaluări
- ECE Laws Contracts and EthicsDocument82 paginiECE Laws Contracts and EthicsIc Marquez89% (9)
- Hyperbolic Radio Navigational SystemDocument4 paginiHyperbolic Radio Navigational SystemCleo RubinoÎncă nu există evaluări
- MAC Address and MAC FilteringDocument2 paginiMAC Address and MAC FilteringCleo RubinoÎncă nu există evaluări
- Geas PERCDCDocument150 paginiGeas PERCDCangelo_lopez1993100% (2)
- MCQ3 DC Boolean Algebra and Logic SimplificationDocument7 paginiMCQ3 DC Boolean Algebra and Logic SimplificationsreekanthaÎncă nu există evaluări
- Lecture10 ZTransFormDocument19 paginiLecture10 ZTransFormaryanbharat007Încă nu există evaluări
- DIWATADocument11 paginiDIWATACleo RubinoÎncă nu există evaluări
- Nava 2Document3 paginiNava 2Cleo RubinoÎncă nu există evaluări
- MAC Address and MAC FilteringDocument2 paginiMAC Address and MAC FilteringCleo RubinoÎncă nu există evaluări
- Nava 2Document3 paginiNava 2Cleo RubinoÎncă nu există evaluări
- ENGINEERING CORRELATION 1 ASSIGNMENT 14 SOLUTIONSDocument3 paginiENGINEERING CORRELATION 1 ASSIGNMENT 14 SOLUTIONSCleo RubinoÎncă nu există evaluări
- Appendix A - Ps Sample Title PageDocument1 paginăAppendix A - Ps Sample Title PageCleo RubinoÎncă nu există evaluări
- Compre 2BDocument3 paginiCompre 2BCleo RubinoÎncă nu există evaluări
- ECE4104 - Exp.2 - .Docx Filename - UTF-8''ECE4104 (Exp.2)Document17 paginiECE4104 - Exp.2 - .Docx Filename - UTF-8''ECE4104 (Exp.2)Cleo RubinoÎncă nu există evaluări
- Universal Shift Registers: Experiment #8Document14 paginiUniversal Shift Registers: Experiment #8Cleo RubinoÎncă nu există evaluări
- (Um, Sorry) I'Ve Been Reincarnated! 1-47Document262 pagini(Um, Sorry) I'Ve Been Reincarnated! 1-47Cleo RubinoÎncă nu există evaluări
- Lidar RefDocument1 paginăLidar RefCleo RubinoÎncă nu există evaluări
- Date of Effectivity: 1st Sem SY 2015-2016 Date Revised: 0 Prepared By: Engr. Ramon A. Alguidano Jr. Approved By: Page 1 of 5Document5 paginiDate of Effectivity: 1st Sem SY 2015-2016 Date Revised: 0 Prepared By: Engr. Ramon A. Alguidano Jr. Approved By: Page 1 of 5Cleo RubinoÎncă nu există evaluări
- Trigonometry & Solid Mensuration - SolutionDocument34 paginiTrigonometry & Solid Mensuration - SolutionLudy Dela Cruz89% (9)
- Hai To Gensou No Grimgar 1Document343 paginiHai To Gensou No Grimgar 1ServandoCrisostomo100% (4)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5782)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Kyrin Trapp 1st Grade Language Arts Lesson PlanDocument4 paginiKyrin Trapp 1st Grade Language Arts Lesson PlanKyrin TrappÎncă nu există evaluări
- Multimodal Advocacy Campaign: Clarity of Videos and SoundsDocument3 paginiMultimodal Advocacy Campaign: Clarity of Videos and SoundsSwin EscobarÎncă nu există evaluări
- ISO 14001 - 2015 Audit Checklist - SafetyCultureDocument15 paginiISO 14001 - 2015 Audit Checklist - SafetyCultureSanjeev VermaÎncă nu există evaluări
- 3.factors and Techniques Influencing Peri-Implant Papillae - PDFDocument12 pagini3.factors and Techniques Influencing Peri-Implant Papillae - PDFMargarita María Blanco LópezÎncă nu există evaluări
- Pe 4.1 - SwimmingDocument21 paginiPe 4.1 - SwimmingJacinthe Angelou D. PeñalosaÎncă nu există evaluări
- Acc6475 2721Document4 paginiAcc6475 2721pak manÎncă nu există evaluări
- Missalette - InstallationDocument56 paginiMissalette - InstallationChristian Luis De GuzmanÎncă nu există evaluări
- Strategies of Literary TranslationDocument7 paginiStrategies of Literary TranslationMuhammad J H AbdullatiefÎncă nu există evaluări
- 2015 - Product Keys For Autodesk ProductsDocument7 pagini2015 - Product Keys For Autodesk ProductsmonkeyDivanÎncă nu există evaluări
- Karlle Louis P. Obviar - S11-04Document2 paginiKarlle Louis P. Obviar - S11-04Karlle ObviarÎncă nu există evaluări
- Emacs Org Mode Keyboard Shortcuts for Agenda, Capture, PrioritiesDocument1 paginăEmacs Org Mode Keyboard Shortcuts for Agenda, Capture, PrioritiesJeremyÎncă nu există evaluări
- AirOS 3.4 - Ubiquiti Wiki#BasicWirelessSettings#BasicWirelessSettingsDocument24 paginiAirOS 3.4 - Ubiquiti Wiki#BasicWirelessSettings#BasicWirelessSettingsAusÎncă nu există evaluări
- The Archaeology of Maritime Landscapes 2011Document363 paginiThe Archaeology of Maritime Landscapes 2011Adriana BernalÎncă nu există evaluări
- NCM - FraiserDocument9 paginiNCM - FraiserNarula Prashant100% (1)
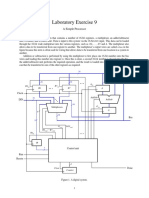
- Laboratory Exercise 9: A Simple ProcessorDocument8 paginiLaboratory Exercise 9: A Simple ProcessorhxchÎncă nu există evaluări
- Ministry of Fisheries Report Into Hoki FisheriesDocument141 paginiMinistry of Fisheries Report Into Hoki FisheriesNewshubÎncă nu există evaluări
- Songs For The Deaf: Parental Advisory EdDocument5 paginiSongs For The Deaf: Parental Advisory EdTinta CafeÎncă nu există evaluări
- 9.36 Project Summary FormDocument2 pagini9.36 Project Summary FormTu Burin DtÎncă nu există evaluări
- School Newsletter - 24.08.12Document2 paginiSchool Newsletter - 24.08.12salfordprimaryÎncă nu există evaluări
- A HELI 0022 V1 01 Rev1Document5 paginiA HELI 0022 V1 01 Rev1CuongDolaÎncă nu există evaluări
- Residency Programs in The USADocument28 paginiResidency Programs in The USAAnastasiafynnÎncă nu există evaluări
- STEM Booklist Publishing 040518Document10 paginiSTEM Booklist Publishing 040518JackÎncă nu există evaluări
- Lectures SSY1352019Document307 paginiLectures SSY1352019S Awais Ahmed100% (2)
- School Form 1 SF 1 10Document6 paginiSchool Form 1 SF 1 10ALEX SARAOSOSÎncă nu există evaluări
- NSO Class 6 Sample Paper 2019 20Document3 paginiNSO Class 6 Sample Paper 2019 20NitinÎncă nu există evaluări
- Fake News Detection PPT 1Document13 paginiFake News Detection PPT 1Sri VarshanÎncă nu există evaluări
- Miguel Angel Quimbay TinjacaDocument9 paginiMiguel Angel Quimbay TinjacaLaura LombanaÎncă nu există evaluări
- PractService Level Agreement NEBDN National Diploma in Dental NursingiceDocument21 paginiPractService Level Agreement NEBDN National Diploma in Dental NursingiceAdriana MihalachiÎncă nu există evaluări
- Today's Court Decision on Land Registration AppealDocument6 paginiToday's Court Decision on Land Registration AppealJohn Lester TanÎncă nu există evaluări
- 67 Golden Rules For Successful LifeDocument2 pagini67 Golden Rules For Successful Lifeviveksharma51100% (1)