S-ar putea să vă placă și
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Tilting Pad Bearing PreloadDocument3 paginiTilting Pad Bearing Preloadrafay0saeed100% (2)
- Employee Travel Advance Request FormDocument1 paginăEmployee Travel Advance Request FormfazzlieÎncă nu există evaluări
- VA1901SOGT-01 - OGC Cooler Fan Vibration Analysis Report PDFDocument3 paginiVA1901SOGT-01 - OGC Cooler Fan Vibration Analysis Report PDFfazzlieÎncă nu există evaluări
- K3080 & K4030 System 1 PDFDocument4 paginiK3080 & K4030 System 1 PDFfazzlieÎncă nu există evaluări
- Performance Appraisal Form: Name: Title: Dept: UC Hire Date: Time in Position: Evaluation PeriodDocument6 paginiPerformance Appraisal Form: Name: Title: Dept: UC Hire Date: Time in Position: Evaluation PeriodfazzlieÎncă nu există evaluări
- Model 112A21 ICP® Pressure Sensor Installation and Operating ManualDocument12 paginiModel 112A21 ICP® Pressure Sensor Installation and Operating ManualfazzlieÎncă nu există evaluări
- Tembungo Mol Pump Vibration Measurement PointsDocument1 paginăTembungo Mol Pump Vibration Measurement PointsfazzlieÎncă nu există evaluări
- Gas Fuel Controller ECU Electrical SchematicDocument1 paginăGas Fuel Controller ECU Electrical SchematicfazzlieÎncă nu există evaluări
- Tsp09265 Ex ECU Issue 9Document21 paginiTsp09265 Ex ECU Issue 9fazzlieÎncă nu există evaluări
- VibroSight Release NotesDocument50 paginiVibroSight Release NotesfazzlieÎncă nu există evaluări
- Machinery Diagnostic PlotsDocument16 paginiMachinery Diagnostic Plotsfazzlie100% (1)
- Gost R Iso 8579 2 99 PDFDocument12 paginiGost R Iso 8579 2 99 PDFfazzlieÎncă nu există evaluări
- Vibration Acceptance Test ReportDocument20 paginiVibration Acceptance Test ReportfazzlieÎncă nu există evaluări
- NTN Bearing Bpfo&BpfiDocument61 paginiNTN Bearing Bpfo&BpfishantanusamajdarÎncă nu există evaluări
- G6600Document13 paginiG6600fazzlie100% (1)
- M3 Valve Leak Inspection ReportDocument5 paginiM3 Valve Leak Inspection Reportfazzlie100% (1)
- Machinery Data Sheet FormDocument1 paginăMachinery Data Sheet Formfazzlie100% (1)
- Background: Reference Value Is The PREVIOUS DATADocument3 paginiBackground: Reference Value Is The PREVIOUS DATAfazzlieÎncă nu există evaluări
- All Measurement in MM: Total PriceDocument21 paginiAll Measurement in MM: Total PricefazzlieÎncă nu există evaluări
- Vibration Analysis Report PDFDocument18 paginiVibration Analysis Report PDFfazzlie100% (2)
- Motor Shaft Max Play Towards Pump (Picture 1) : InternalDocument6 paginiMotor Shaft Max Play Towards Pump (Picture 1) : InternalfazzlieÎncă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Lecture - Satellite CommunicationDocument84 paginiLecture - Satellite CommunicationHazem Mohamed Youssif100% (1)
- Agk Full PDFDocument346 paginiAgk Full PDFSabik Rahim100% (1)
- Cooling of CPU Fan PDFDocument10 paginiCooling of CPU Fan PDFLeonard LiangÎncă nu există evaluări
- Proposed Rule: Airworthiness Directives: General Machine - Diecron, Inc.Document4 paginiProposed Rule: Airworthiness Directives: General Machine - Diecron, Inc.Justia.comÎncă nu există evaluări
- SN-1-Jul-2013 Aero-Dyn SWE Aeroelastic Simulation With ADCoSDocument3 paginiSN-1-Jul-2013 Aero-Dyn SWE Aeroelastic Simulation With ADCoSrrÎncă nu există evaluări
- Metcoloy 5 10-627Document6 paginiMetcoloy 5 10-627Remco Van Den BergÎncă nu există evaluări
- Report PDFDocument97 paginiReport PDFMark McKinsnkeyÎncă nu există evaluări
- Homework Problems Chapter 3: Vectors and Two Dimensional MotionDocument4 paginiHomework Problems Chapter 3: Vectors and Two Dimensional MotionHamidÎncă nu există evaluări
- CHAPTER 17 Aircraft Airworthiness InspectionDocument48 paginiCHAPTER 17 Aircraft Airworthiness Inspectionখালিদহাসান100% (3)
- Mido History enDocument4 paginiMido History enRobertIonicaÎncă nu există evaluări
- Assignment PHY12Document7 paginiAssignment PHY12Nadine FrisnediÎncă nu există evaluări
- MEDIAJET - MARKEM-IMAJE 9028 Inkjet Printer Head InstallationDocument4 paginiMEDIAJET - MARKEM-IMAJE 9028 Inkjet Printer Head Installationbhumijaya100% (1)
- Certified Thermal Spray Operator (CTSO) Program UpdateDocument21 paginiCertified Thermal Spray Operator (CTSO) Program Updatemado reouÎncă nu există evaluări
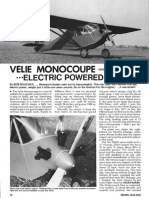
- Velie Monocoupe RC Oz12187 ArticleDocument5 paginiVelie Monocoupe RC Oz12187 ArticleGerardo GomezÎncă nu există evaluări
- CIAM Flyer 3-2020-PrintDocument4 paginiCIAM Flyer 3-2020-PrintlumpertÎncă nu există evaluări
- Calculation of Wind Load On Circular Cylinders - Eurocode 1Document7 paginiCalculation of Wind Load On Circular Cylinders - Eurocode 1Asaru DeenÎncă nu există evaluări
- Hightempaerospace Private Limited: Job Qualification / Requirement MatrixDocument1 paginăHightempaerospace Private Limited: Job Qualification / Requirement MatrixRangaÎncă nu există evaluări
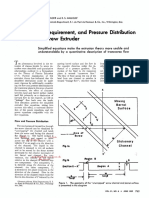
- Flow,: Power Requirement, and Pressure Distribution of Fluid in A Screw ExtruderDocument6 paginiFlow,: Power Requirement, and Pressure Distribution of Fluid in A Screw ExtruderLê Văn HòaÎncă nu există evaluări
- Electronics-2 Lab Report 7Document7 paginiElectronics-2 Lab Report 7siyal343Încă nu există evaluări
- Short Circuit Withstand StrengthDocument4 paginiShort Circuit Withstand StrengthSanjeewa HemaratneÎncă nu există evaluări
- Manchester Airport Group - AeroTURN Case Study - 1112 PDFDocument1 paginăManchester Airport Group - AeroTURN Case Study - 1112 PDFTransoft EMEAÎncă nu există evaluări
- Fast Facts Figures ENDocument9 paginiFast Facts Figures ENJamesÎncă nu există evaluări
- Organic - Positions Us 20221129 2022-11-30T10!28!51ZDocument4 paginiOrganic - Positions Us 20221129 2022-11-30T10!28!51ZBidding enterprisesÎncă nu există evaluări
- Airport Mapping DatabasesDocument8 paginiAirport Mapping DatabasesMohamed AbodabashÎncă nu există evaluări
- Mag Hytec Rear Cover AA 14-11.5Document3 paginiMag Hytec Rear Cover AA 14-11.5darrylÎncă nu există evaluări
- Manual Gates DesignDocument117 paginiManual Gates DesignmariodruÎncă nu există evaluări
- BacklashDocument6 paginiBacklashvishalÎncă nu există evaluări
- Aluminium Alloy 7075Document3 paginiAluminium Alloy 7075jcetmechanicalÎncă nu există evaluări
- Vtec Grinding and Lapping PRODUAL 2014Document2 paginiVtec Grinding and Lapping PRODUAL 2014carloslaioloÎncă nu există evaluări