S-ar putea să vă placă și
- ApmuDocument11 paginiApmuCarlos MoraÎncă nu există evaluări
- Tecnologias de La Información PresentaciónDocument24 paginiTecnologias de La Información PresentaciónCarlos MoraÎncă nu există evaluări
- Baby Shower SamuelDocument1 paginăBaby Shower SamuelCarlos MoraÎncă nu există evaluări
- Adoquines EcologicosDocument10 paginiAdoquines EcologicosCarlos MoraÎncă nu există evaluări
- Cátedras 15-17 de MarzoDocument11 paginiCátedras 15-17 de MarzoCarlos MoraÎncă nu există evaluări
- AcfiDocument1 paginăAcfiCarlos MoraÎncă nu există evaluări
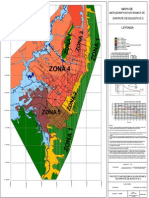
- Mapa Microzonifica SismicaDocument1 paginăMapa Microzonifica SismicaLeonardo AlbornozÎncă nu există evaluări
- Ergonomia 2Document6 paginiErgonomia 2Carlos MoraÎncă nu există evaluări
- Protocolo Técnico Práctica Prototipado RápidoDocument16 paginiProtocolo Técnico Práctica Prototipado RápidoCarlos MoraÎncă nu există evaluări
- Programa Elet 2Document2 paginiPrograma Elet 2Carlos MoraÎncă nu există evaluări
- Movimientos de La TierraDocument3 paginiMovimientos de La TierraCarlos MoraÎncă nu există evaluări
- Primera Practica TYTRDocument1 paginăPrimera Practica TYTRCarlos MoraÎncă nu există evaluări
- HIDROGENODocument11 paginiHIDROGENOCarlos MoraÎncă nu există evaluări
- Practica 1 MicroscpioDocument11 paginiPractica 1 MicroscpioCarlos MoraÎncă nu există evaluări
- D - Guia de Laboratorio ExtrusionDocument12 paginiD - Guia de Laboratorio ExtrusionCarlos MoraÎncă nu există evaluări
- Analisis GraficoDocument5 paginiAnalisis GraficoCarlos MoraÎncă nu există evaluări
- Apuntes Tema 3 PDFDocument21 paginiApuntes Tema 3 PDFCarlos MoraÎncă nu există evaluări
- pREV. RIESGOSDocument1 paginăpREV. RIESGOSCarlos MoraÎncă nu există evaluări
- Carga Electrica PDFDocument4 paginiCarga Electrica PDFLuigy CcaÎncă nu există evaluări
- Cuál Es El Marketing de La PositivaDocument2 paginiCuál Es El Marketing de La PositivaDiego Nestarez0% (1)
- Fractura de CaderaDocument9 paginiFractura de CaderaDiane Troncoso AlegriaÎncă nu există evaluări
- Instalación de Debian en Modo Texto y Configuración de DHCP Con APACHE 2Document12 paginiInstalación de Debian en Modo Texto y Configuración de DHCP Con APACHE 2Carlos GalleguillosÎncă nu există evaluări
- Licuefaccion de SuelosDocument26 paginiLicuefaccion de SuelospedrocqÎncă nu există evaluări
- Sociologia Familia VenezolanaDocument29 paginiSociologia Familia Venezolanamauribeth zerpa100% (1)
- Modelo CidemDocument7 paginiModelo CidemAmérica Hernández50% (2)
- Cuadro Tipos de Dislexias y DisgrafiasDocument3 paginiCuadro Tipos de Dislexias y Disgrafiaskarulke100% (1)
- Procesos administrativos y documentos claveDocument18 paginiProcesos administrativos y documentos claveDavid Aguilar EcheverriaÎncă nu există evaluări
- Problemario Media Superior FisicaDocument10 paginiProblemario Media Superior FisicaAdriana CruzÎncă nu există evaluări
- Sistemas de Produccion AgricolaDocument11 paginiSistemas de Produccion AgricolaNavarrete Jc100% (3)
- NT 21 Señalización. RequisitosDocument8 paginiNT 21 Señalización. RequisitosByron Marcelo Paez OlallaÎncă nu există evaluări
- Actividad Integradora 3 de 6 - Módulo 15 - de Miriam Juarez Sanchez - Resubido y Descensurado.Document3 paginiActividad Integradora 3 de 6 - Módulo 15 - de Miriam Juarez Sanchez - Resubido y Descensurado.Aldo Lazcano FranciscoÎncă nu există evaluări
- Examen 2 Pruebas de SoftwareDocument1 paginăExamen 2 Pruebas de SoftwareLuis Rengifo SaavedraÎncă nu există evaluări
- TrabajoDocument4 paginiTrabajoWilsen VargasÎncă nu există evaluări
- Catastro Físico 1º Nivel 2008Document9 paginiCatastro Físico 1º Nivel 2008Jorge Andrés Ramos GonzálezÎncă nu există evaluări
- Calificaciones Enfermedades ProfesionalesDocument2 paginiCalificaciones Enfermedades ProfesionalesViviana Monsalve CornesÎncă nu există evaluări
- PERFIL DE INFORME DE COMPETENCIA PROFESIONAL-2 César ValdiviaDocument3 paginiPERFIL DE INFORME DE COMPETENCIA PROFESIONAL-2 César ValdiviacesdelÎncă nu există evaluări
- 2 Estadisticadescriptiva2Document6 pagini2 Estadisticadescriptiva2Soy YoÎncă nu există evaluări
- Manual Liquidación Gastos ViajeDocument19 paginiManual Liquidación Gastos ViajeCarlos Trejo TrejoÎncă nu există evaluări
- Partes y Elementos para La Construcción de Un AlgoritmoDocument14 paginiPartes y Elementos para La Construcción de Un AlgoritmoCapecarÎncă nu există evaluări
- En La Ficha Insertar (Word)Document4 paginiEn La Ficha Insertar (Word)Adilson Serrano100% (1)
- Tarea 3 Competencias Comunicativas Deisy BaldovinoDocument9 paginiTarea 3 Competencias Comunicativas Deisy BaldovinoAnibal Ceballos Vecino60% (5)
- Gestión de Seguridad y Salu Ocupacional-Sesion 6-Chavez Seminario EmeritoDocument23 paginiGestión de Seguridad y Salu Ocupacional-Sesion 6-Chavez Seminario EmeritoArielObregonÎncă nu există evaluări
- Tesis de PresupuestoDocument61 paginiTesis de PresupuestoFrancis Sandoval0% (3)
- SI010 PS Gestión Documental OnbaseDocument43 paginiSI010 PS Gestión Documental OnbasedanepÎncă nu există evaluări
- Elementos Esenciales Del Contrato de TrabajoDocument20 paginiElementos Esenciales Del Contrato de TrabajoFELIX CHERO MEDINAÎncă nu există evaluări
- Estructuracion Seguridad y SaludDocument145 paginiEstructuracion Seguridad y SaludDANIBATAÎncă nu există evaluări
- Inspecccion Laboral-UsaidDocument30 paginiInspecccion Laboral-UsaidHunterCrackÎncă nu există evaluări
- Para Una Metodología de Análisis Histórico de La PrensaDocument20 paginiPara Una Metodología de Análisis Histórico de La Prensalefino77Încă nu există evaluări
- Ejercicios de Presión IIDocument9 paginiEjercicios de Presión IIRenato DonosoÎncă nu există evaluări