S-ar putea să vă placă și
- CFD Advection-Diffusion EquationDocument8 paginiCFD Advection-Diffusion Equationneurolepsia3790Încă nu există evaluări
- MainDocument353 paginiMainChrisÎncă nu există evaluări
- VibrationsDocument93 paginiVibrationsbislerinit86% (7)
- Answer(s) : D 107 N D 152 N: Practice Problems On Boundary LayersDocument17 paginiAnswer(s) : D 107 N D 152 N: Practice Problems On Boundary Layersعمار ياسرÎncă nu există evaluări
- QUBE-Servo Inverted Pendulum ModelingDocument4 paginiQUBE-Servo Inverted Pendulum ModelingByron Xavier Lima CedilloÎncă nu există evaluări
- 6.057 Introduction To MATLABDocument53 pagini6.057 Introduction To MATLABAmir HosseinÎncă nu există evaluări
- Slotted Link MechanismDocument6 paginiSlotted Link MechanismShawn Waltz50% (2)
- Autocad Mechanical ManualDocument192 paginiAutocad Mechanical ManualFrans Robert Rodriguez SanchezÎncă nu există evaluări
- Laminar Pipe FlowDocument77 paginiLaminar Pipe FlowFlyNarutoFly27Încă nu există evaluări
- Engineering MechanicsDocument46 paginiEngineering MechanicsmuradÎncă nu există evaluări
- Engineering Vibrations - Inman - Chapter 1 ProblemsDocument14 paginiEngineering Vibrations - Inman - Chapter 1 ProblemsAhmed Eed0% (1)
- Thick Wall CylinderDocument7 paginiThick Wall Cylinderchuckhsu1248Încă nu există evaluări
- IIT Guhati Note Continuum MechanicsDocument254 paginiIIT Guhati Note Continuum MechanicsRahul KarnaÎncă nu există evaluări
- Unit-I: Fundamentals of Gas DynamicsDocument45 paginiUnit-I: Fundamentals of Gas DynamicsMuthuvel MÎncă nu există evaluări
- Tractor Seat DesignDocument5 paginiTractor Seat Designsln_rjÎncă nu există evaluări
- Partial Differential Equation of Parabolic TypeDocument15 paginiPartial Differential Equation of Parabolic TypeDionysios Zelios100% (1)
- Torsional Vibration RotorDocument59 paginiTorsional Vibration Rotordaongocha108100% (1)
- WINSEM2018-19 - MEE3001 - TH - CTS202 - VL2018195003764 - Reference Material I - Module 2 Design Against Fluctuating LoadDocument46 paginiWINSEM2018-19 - MEE3001 - TH - CTS202 - VL2018195003764 - Reference Material I - Module 2 Design Against Fluctuating LoadViswanath MÎncă nu există evaluări
- Newton-Euler Lagrange For RoboticsDocument13 paginiNewton-Euler Lagrange For RoboticsLeonardo Augusto0% (1)
- Free Vibration With DampingDocument31 paginiFree Vibration With Dampingriya pradhanÎncă nu există evaluări
- ME 6603 Question Bank: Unit I - Introduction Part-A (2-Marks)Document6 paginiME 6603 Question Bank: Unit I - Introduction Part-A (2-Marks)Bharathi KannaÎncă nu există evaluări
- Bond Graph ModelingDocument22 paginiBond Graph Modelingyesongyesung100% (1)
- ODE SimulinkDocument92 paginiODE SimulinkspeedyroooÎncă nu există evaluări
- Chapter 8 Navier-Stokes EquationDocument16 paginiChapter 8 Navier-Stokes EquationSyahiran SalehÎncă nu există evaluări
- HW9 SolutionsDocument5 paginiHW9 SolutionsAndreas mÎncă nu există evaluări
- The Thomas Algorithm For Tridiagonal Matrix Equations PDFDocument3 paginiThe Thomas Algorithm For Tridiagonal Matrix Equations PDFAndra Walileuw100% (3)
- Blood Flow - MatlabDocument6 paginiBlood Flow - Matlaba_minisoft2005Încă nu există evaluări
- Car Suspension MathlabDocument8 paginiCar Suspension Mathlabavunnam100% (1)
- Introduction To Mechanical Vibrations EnotesDocument14 paginiIntroduction To Mechanical Vibrations Enotesaayushmech18100% (2)
- CHAPTER 7 Heat TransferDocument26 paginiCHAPTER 7 Heat TransferaimanrslnÎncă nu există evaluări
- Orde2 PDFDocument30 paginiOrde2 PDFAnggoro Indarto Akbar100% (2)
- Finite Different Method - Heat Transfer - Using MatlabDocument27 paginiFinite Different Method - Heat Transfer - Using MatlabLe Cong LapÎncă nu există evaluări
- Simulated Annealing: Basics and Application ExamplesDocument13 paginiSimulated Annealing: Basics and Application ExamplesRicardo Alejos100% (1)
- Tangy Air CompressorDocument16 paginiTangy Air CompressorABUBAKAR KHANÎncă nu există evaluări
- Total Probability and Bayes' TheoremDocument3 paginiTotal Probability and Bayes' TheoremArun Kumar DhupamÎncă nu există evaluări
- CHAPTER 8 Heat TransferDocument22 paginiCHAPTER 8 Heat Transferaimanrsln0% (1)
- One Dimensional FlowDocument75 paginiOne Dimensional FlowJashia IslamÎncă nu există evaluări
- Lectures 1 3Document39 paginiLectures 1 3Salvador F Ayala RojasÎncă nu există evaluări
- COMSOLDocument6 paginiCOMSOLHrudayeshÎncă nu există evaluări
- Numerical Solution of Ordinary Differential Equations Part 2 - Nonlinear EquationsDocument38 paginiNumerical Solution of Ordinary Differential Equations Part 2 - Nonlinear EquationsMelih TecerÎncă nu există evaluări
- Atd Questions and AnswersDocument18 paginiAtd Questions and AnswersPraba Karan DÎncă nu există evaluări
- Basics of Lattice Boltzmann Method For Fluid FlowsDocument27 paginiBasics of Lattice Boltzmann Method For Fluid FlowsSajjad Rasool ChaudhryÎncă nu există evaluări
- Computational Method For The Design of Wind Turbine Blades: A.J. Vitale, A.P. RossiDocument5 paginiComputational Method For The Design of Wind Turbine Blades: A.J. Vitale, A.P. RossiMaurício SoaresÎncă nu există evaluări
- ANSYS Tips and ANSYS TricksDocument74 paginiANSYS Tips and ANSYS Tricksjulio1114Încă nu există evaluări
- Common PDE ProblemsDocument28 paginiCommon PDE Problemsأبو كعب علاء الدينÎncă nu există evaluări
- FVM - CFDDocument44 paginiFVM - CFDgrkguptaÎncă nu există evaluări
- Fluent-Fsi 14.0 ws3 Hyperelastic Flap Part1Document22 paginiFluent-Fsi 14.0 ws3 Hyperelastic Flap Part1Raúl Sánchez100% (1)
- Vibration Matlab v9Document10 paginiVibration Matlab v9b_miniraoÎncă nu există evaluări
- FEA Question BankDocument6 paginiFEA Question Bankmenmoli2012Încă nu există evaluări
- Pdetool TutorialDocument12 paginiPdetool TutorialOluwaseun AweÎncă nu există evaluări
- Turbulence Modeling (Dr. Alam Wardag)Document50 paginiTurbulence Modeling (Dr. Alam Wardag)Shehryar AliÎncă nu există evaluări
- Lecture 21Document38 paginiLecture 21yakwetuÎncă nu există evaluări
- CM LC1Document28 paginiCM LC1Eng W EaÎncă nu există evaluări
- 12 Free Convection of Air Over A Vertical Plate (Isothermal)Document24 pagini12 Free Convection of Air Over A Vertical Plate (Isothermal)Camilo Albornoz100% (1)
- STRC201 Sdof JMWBDocument99 paginiSTRC201 Sdof JMWBJura PateregaÎncă nu există evaluări
- Vibration Isolation and Force Transmissibility - 6Document50 paginiVibration Isolation and Force Transmissibility - 6Jay PrasathÎncă nu există evaluări
- Quantum Lecture - 2-2021Document8 paginiQuantum Lecture - 2-2021Kamal kumar SahooÎncă nu există evaluări
- Fourier SeriesDocument12 paginiFourier SeriesjabbarÎncă nu există evaluări
- 2018 Quantum II Lecturer NotesDocument62 pagini2018 Quantum II Lecturer NotesGideon Addai100% (1)
- Chapter 3Document9 paginiChapter 3Hamza HussineÎncă nu există evaluări
- Chapterwise Formula-1Document3 paginiChapterwise Formula-1tunio.bscsf21Încă nu există evaluări
- A-level Maths Revision: Cheeky Revision ShortcutsDe la EverandA-level Maths Revision: Cheeky Revision ShortcutsEvaluare: 3.5 din 5 stele3.5/5 (8)
- Chap1 ECL301L Lab Manual PascualDocument15 paginiChap1 ECL301L Lab Manual PascualpascionladionÎncă nu există evaluări
- Calculation of Gear Dimensions - KHK Gears PDFDocument25 paginiCalculation of Gear Dimensions - KHK Gears PDFlawlawÎncă nu există evaluări
- Introduction To Programming in MATLAB: Lecture 4: Advanced Methods Orhan CelikerDocument30 paginiIntroduction To Programming in MATLAB: Lecture 4: Advanced Methods Orhan CelikerlawlawÎncă nu există evaluări
- MatlabDocument38 paginiMatlabKakashiÎncă nu există evaluări
- هونەری پەروەردەی کوڕانDocument208 paginiهونەری پەروەردەی کوڕانlawlawÎncă nu există evaluări
- Gear Terminology - KHK GearsDocument3 paginiGear Terminology - KHK GearslawlawÎncă nu există evaluări
- MIT6 057IAP19 Lec2 PDFDocument55 paginiMIT6 057IAP19 Lec2 PDFAmit ShuklaÎncă nu există evaluări
- Free Gear Calculator - KHK GearsDocument5 paginiFree Gear Calculator - KHK GearslawlawÎncă nu există evaluări
- Know About Parameters That Determine Gear Shapes - KHK Gears PDFDocument6 paginiKnow About Parameters That Determine Gear Shapes - KHK Gears PDFlawlawÎncă nu există evaluări
- Gear Types and Terminology - KHK Gears PDFDocument8 paginiGear Types and Terminology - KHK Gears PDFlawlawÎncă nu există evaluări
- Basic Gear Terminology and Calculation - KHK Gears PDFDocument9 paginiBasic Gear Terminology and Calculation - KHK Gears PDFlawlawÎncă nu există evaluări
- Mech 2 2 Kom Unit 1Document11 paginiMech 2 2 Kom Unit 1Venkateswar Reddy MallepallyÎncă nu există evaluări
- RRRT Velacc LecDocument8 paginiRRRT Velacc LecbshahidhÎncă nu există evaluări
- MEC291 Dynamic Crank and Slider2Document9 paginiMEC291 Dynamic Crank and Slider2Amir ArsyadÎncă nu există evaluări
- Slider Crank Power Hammer Mechanism Project ReportDocument33 paginiSlider Crank Power Hammer Mechanism Project ReportYemmina Madhusudhan80% (15)
- Graphical Linkage Synthesis: Union College Mechanical Engineering MER 312: Dynamics and Kinematics (Of Mechanisms) / ATDocument23 paginiGraphical Linkage Synthesis: Union College Mechanical Engineering MER 312: Dynamics and Kinematics (Of Mechanisms) / ATManoah StephenÎncă nu există evaluări
- Theory of Machine and Machine Design I (2003) PDFDocument9 paginiTheory of Machine and Machine Design I (2003) PDFlawlawÎncă nu există evaluări
- Theory of MachinesDocument41 paginiTheory of MachinesC V CHANDRASHEKARA75% (4)
- 5th SmesterDocument19 pagini5th Smestermolateam2Încă nu există evaluări
- Unit-III Velocity and Acceleration Analysis: Dr. M Krishna Professor and Dean R&DDocument68 paginiUnit-III Velocity and Acceleration Analysis: Dr. M Krishna Professor and Dean R&DlawlawÎncă nu există evaluări
- MM203 Lab ManualDocument34 paginiMM203 Lab Manualkrutis_12Încă nu există evaluări
- Acceleration AnalysisDocument34 paginiAcceleration AnalysislawlawÎncă nu există evaluări
- Composite Rev7 PDFDocument36 paginiComposite Rev7 PDFlawlawÎncă nu există evaluări
- MM203 Lab ManualDocument34 paginiMM203 Lab Manualkrutis_12Încă nu există evaluări
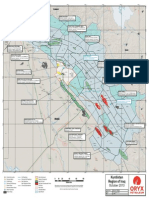
- Kurdistan Region of Iraq Investors MapDocument1 paginăKurdistan Region of Iraq Investors Maphasan_676489616Încă nu există evaluări
- Features: 253 L FS 0055 STDocument2 paginiFeatures: 253 L FS 0055 STCAFECHINOÎncă nu există evaluări
- Optimal Placement of Piezoelectric Actuators On Plate Structures For Active Vibration Control Using Genetic AlgorithmDocument14 paginiOptimal Placement of Piezoelectric Actuators On Plate Structures For Active Vibration Control Using Genetic AlgorithmlawlawÎncă nu există evaluări
- 9a01302 Strength of Materials IDocument4 pagini9a01302 Strength of Materials IsivabharathamurthyÎncă nu există evaluări
- Gravitation MCQ TestDocument2 paginiGravitation MCQ TestrhythmÎncă nu există evaluări
- Tos1 MidtermDocument2 paginiTos1 MidtermMa.Zyra M. DascoÎncă nu există evaluări
- Open Channel FlowDocument68 paginiOpen Channel FlowhaasnÎncă nu există evaluări
- Castiglianos Theorem GEREDocument14 paginiCastiglianos Theorem GEREpgp655484100% (2)
- SUVAT QuestionsDocument1 paginăSUVAT QuestionsAhmed ZakiÎncă nu există evaluări
- Report and DesignDocument53 paginiReport and Designkiran raghukiranÎncă nu există evaluări
- Basic Automobile DesignDocument3 paginiBasic Automobile Designraumil1237590Încă nu există evaluări
- AISI - Direct Strength Method (DSM) Design GuideDocument184 paginiAISI - Direct Strength Method (DSM) Design GuidePaul KohanÎncă nu există evaluări
- 2.1 Subgrade PerformanceDocument15 pagini2.1 Subgrade Performanceiciubotaru20002123Încă nu există evaluări
- Mechanics - Forces and EquilibriumDocument30 paginiMechanics - Forces and EquilibriumMing ZengÎncă nu există evaluări
- Vectors: Week No Date Lect Tut Textbook 1Document3 paginiVectors: Week No Date Lect Tut Textbook 1lingkalaÎncă nu există evaluări
- Act 7 Science PowerpointDocument41 paginiAct 7 Science PowerpointBless CotingjoÎncă nu există evaluări
- ME 121: Engineering MechanicsDocument45 paginiME 121: Engineering MechanicsMuhammad FahadÎncă nu există evaluări
- Project Data: Project Name Project Number Author Description Date 17/06/2020 Design Code AISC 360-16Document9 paginiProject Data: Project Name Project Number Author Description Date 17/06/2020 Design Code AISC 360-16Pham DuctrungÎncă nu există evaluări
- Annotated Physics Data Booklet 2016 PDFDocument1 paginăAnnotated Physics Data Booklet 2016 PDFClare Chen100% (1)
- ASD Mid 2 Imp UesDocument8 paginiASD Mid 2 Imp UesNobleSharmaÎncă nu există evaluări
- CE EVALUATION EXAM No. 5 - Buoyancy, Equilibrium, Fluid Flows (Answer Key)Document5 paginiCE EVALUATION EXAM No. 5 - Buoyancy, Equilibrium, Fluid Flows (Answer Key)Angelice Alliah De la CruzÎncă nu există evaluări
- B.Tech. I /II Semester (Common To All Branches) Met-103 Manufacturing ProcessesDocument144 paginiB.Tech. I /II Semester (Common To All Branches) Met-103 Manufacturing ProcessesSiddarth WadhwaÎncă nu există evaluări
- S5 Tensile TestDocument7 paginiS5 Tensile Testdanial 95Încă nu există evaluări
- Buckling Lengths of Irregular Frame ColumnsDocument9 paginiBuckling Lengths of Irregular Frame ColumnsYi ZhuangÎncă nu există evaluări
- Student Exploration: Waves: Vocabulary: Amplitude, Compression, Crest, Frequency, Longitudinal Wave, Medium, PeriodDocument7 paginiStudent Exploration: Waves: Vocabulary: Amplitude, Compression, Crest, Frequency, Longitudinal Wave, Medium, PeriodNims DaydaÎncă nu există evaluări
- Introduction To Dynamics of MachineDocument82 paginiIntroduction To Dynamics of MachineKumar BabuÎncă nu există evaluări
- Computer Aided Analysis and Design of Building Structures PDFDocument145 paginiComputer Aided Analysis and Design of Building Structures PDFUmer WaheedÎncă nu există evaluări
- Finite Element Analysis: Course ContentsDocument52 paginiFinite Element Analysis: Course Contentsvivek panchalÎncă nu există evaluări
- MCQ Unit I Phy110Document28 paginiMCQ Unit I Phy110Ansh ThakurÎncă nu există evaluări
- TOS II Prev Year QPsDocument16 paginiTOS II Prev Year QPsEesha NairÎncă nu există evaluări
- Axially Loaded Members PDFDocument50 paginiAxially Loaded Members PDFCharbel Saad SaadÎncă nu există evaluări
- Design of Connections: Fig 4.1: Typical Connections: (A) Beam To Column (B) Beam To BeamDocument16 paginiDesign of Connections: Fig 4.1: Typical Connections: (A) Beam To Column (B) Beam To BeamMuriungi RicharsÎncă nu există evaluări
- Testing Concrete ConstructionDocument10 paginiTesting Concrete ConstructionKaye Ibañez CastilloÎncă nu există evaluări