S-ar putea să vă placă și
- EM 03 Haedrich Integrated Electric Motor Design Electromagnetics Cooling Acoustics Ansys Acum Wien 20150429Document35 paginiEM 03 Haedrich Integrated Electric Motor Design Electromagnetics Cooling Acoustics Ansys Acum Wien 20150429mohamedezeldinÎncă nu există evaluări
- EM 02 Lederer TU Wien Reliability Prediction For IGBT Modules Under Service ConditionsDocument18 paginiEM 02 Lederer TU Wien Reliability Prediction For IGBT Modules Under Service ConditionsmohamedezeldinÎncă nu există evaluări
- EM 01 Haedrich Electromechanical Update Ansys Acum Wien 20150429 1Document61 paginiEM 01 Haedrich Electromechanical Update Ansys Acum Wien 20150429 1mohamedezeldinÎncă nu există evaluări
- CADFEM Webinar Vibroakustik 20160317 SPEDocument32 paginiCADFEM Webinar Vibroakustik 20160317 SPEmohamedezeldinÎncă nu există evaluări
- Fluent Theory ManualDocument816 paginiFluent Theory Manualkarthik_deven100% (2)
- CFD 07 Grotjans Kainz ANSYS AIM-UpdateDocument8 paginiCFD 07 Grotjans Kainz ANSYS AIM-UpdatemohamedezeldinÎncă nu există evaluări
- CFD 06 Kainz ANSYS Instationaere Kopplung Von SchaufelreihenDocument40 paginiCFD 06 Kainz ANSYS Instationaere Kopplung Von SchaufelreihenmohamedezeldinÎncă nu există evaluări
- CFD 01 Grotjans ANSYS ANSYS 16.0 CFD Update Release Highlights-1Document33 paginiCFD 01 Grotjans ANSYS ANSYS 16.0 CFD Update Release Highlights-1mohamedezeldinÎncă nu există evaluări
- CFD 04 Pirker JKU Linz Numerical Simulation of Cyclone Separation-2Document25 paginiCFD 04 Pirker JKU Linz Numerical Simulation of Cyclone Separation-2mohamedezeldinÎncă nu există evaluări
- CFD 02 Jost Turboinstitut Improvement of Efficiency Prediction of Axial TurbinesDocument21 paginiCFD 02 Jost Turboinstitut Improvement of Efficiency Prediction of Axial TurbinesmohamedezeldinÎncă nu există evaluări
- 5 Modeling of Turbulent FlowsDocument49 pagini5 Modeling of Turbulent FlowsAlex DanielÎncă nu există evaluări
- MeshingDocument54 paginiMeshingmohamedezeldinÎncă nu există evaluări
- Force AnalysisDocument1 paginăForce AnalysismohamedezeldinÎncă nu există evaluări
- GearsDocument190 paginiGearsmohamedezeldinÎncă nu există evaluări
- Gear MotorsDocument86 paginiGear MotorsmohamedezeldinÎncă nu există evaluări
- Hybrid VIPDocument42 paginiHybrid VIPmohamedezeldinÎncă nu există evaluări
- VIP Cardan Vibrations PDFDocument25 paginiVIP Cardan Vibrations PDFmohamedezeldinÎncă nu există evaluări
- Addressing Gear Noise in Power Take-OffsDocument3 paginiAddressing Gear Noise in Power Take-OffsmohamedezeldinÎncă nu există evaluări
- Hybrid Powertrain SolutionsDocument27 paginiHybrid Powertrain SolutionsmohamedezeldinÎncă nu există evaluări
- Experimental study of friction in aluminium bolted jointsDocument3 paginiExperimental study of friction in aluminium bolted jointsmohamedezeldinÎncă nu există evaluări
- Series-Parallel Hybrid Design VIPDocument13 paginiSeries-Parallel Hybrid Design VIPmohamedezeldinÎncă nu există evaluări
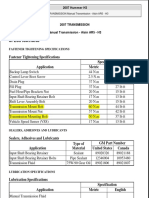
- Hummer H3 Manual TransmissionDocument369 paginiHummer H3 Manual TransmissionmohamedezeldinÎncă nu există evaluări
- Chris Mi HandoutDocument151 paginiChris Mi HandoutmohamedezeldinÎncă nu există evaluări
- Lower and Higher Heating Values of Gas Liquid and Solid FuelsDocument1 paginăLower and Higher Heating Values of Gas Liquid and Solid FuelsNikunj PipariyaÎncă nu există evaluări
- Rolling ResistanceDocument64 paginiRolling Resistancemohamedezeldin100% (1)
- Comparison Between Ev and Charge DepletingDocument11 paginiComparison Between Ev and Charge DepletingmohamedezeldinÎncă nu există evaluări
- Parallel VipDocument10 paginiParallel VipmohamedezeldinÎncă nu există evaluări
- Parallel HybridDocument6 paginiParallel HybridmohamedezeldinÎncă nu există evaluări
- ANSYS Workbench-Fatigue-ModuleDocument31 paginiANSYS Workbench-Fatigue-ModulepodrowÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Demo10043 Mustang 1965Document30 paginiDemo10043 Mustang 1965P KÎncă nu există evaluări
- Hydraulic Pumps: Main MenuDocument15 paginiHydraulic Pumps: Main MenuNaing Min Htun100% (3)
- Motor DieselDocument93 paginiMotor Dieselzaka_czÎncă nu există evaluări
- Valve Lapping Machine For Internal Combustion EnginesDocument51 paginiValve Lapping Machine For Internal Combustion Enginesyifruseyife60Încă nu există evaluări
- Timing Gears (Sleeve Metering Fuel System - PC & DI) : SpecificationsDocument3 paginiTiming Gears (Sleeve Metering Fuel System - PC & DI) : SpecificationsIgorÎncă nu există evaluări
- Teleflex Steering SelectionDocument2 paginiTeleflex Steering SelectionmymagicalworldÎncă nu există evaluări
- Engine Components IDocument33 paginiEngine Components IParbat ShresthaÎncă nu există evaluări
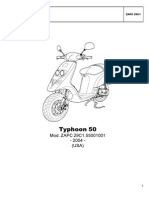
- Typhoon 50 PartsDocument68 paginiTyphoon 50 PartsPetrovics AttilaÎncă nu există evaluări
- ETEESE17-1683 - Investigation Report Regarding Oil Filter Alarm of ERL S16U (06-Mar-2018)Document24 paginiETEESE17-1683 - Investigation Report Regarding Oil Filter Alarm of ERL S16U (06-Mar-2018)Falgon IslamÎncă nu există evaluări
- The Car Transmission BibleDocument12 paginiThe Car Transmission Biblezeeshanahmad111100% (1)
- WFI0032 DF Conversion PresentationDocument36 paginiWFI0032 DF Conversion PresentationDesri TandiÎncă nu există evaluări
- SocioX5 enDocument4 paginiSocioX5 enCr250rÎncă nu există evaluări
- D 9 MHDocument2 paginiD 9 MHDante FloresÎncă nu există evaluări
- Specification's of Isuzu Elf, Giga & LVDocument2 paginiSpecification's of Isuzu Elf, Giga & LVMuhaimin100% (1)
- 777 - Cockpit - Poster (777-200LR)Document1 pagină777 - Cockpit - Poster (777-200LR)erenkrcÎncă nu există evaluări
- Dat P222leDocument2 paginiDat P222lePowerTechÎncă nu există evaluări
- 777e PDFDocument28 pagini777e PDFSoporte CGeoMinÎncă nu există evaluări
- 995-T System Alignament HunterDocument12 pagini995-T System Alignament HunterArturo Zavala UrquidesÎncă nu există evaluări
- Spraymec 6050 WPCDocument3 paginiSpraymec 6050 WPCPatop CofréÎncă nu există evaluări
- MAHLE Original Piston Ring Sets 2015 PDFDocument653 paginiMAHLE Original Piston Ring Sets 2015 PDFValerian100% (1)
- Kamatsu Pc228us Uslc-3e0Document8 paginiKamatsu Pc228us Uslc-3e0Piotr Gabryś Hi-this100% (2)
- Aprilia SXR BrochureDocument12 paginiAprilia SXR BrochurealphaÎncă nu există evaluări
- PB Engine Kappa EngDocument20 paginiPB Engine Kappa EngOscar AraqueÎncă nu există evaluări
- Osigurači Renault Megane 3Document13 paginiOsigurači Renault Megane 3Zoran Podhraški0% (1)
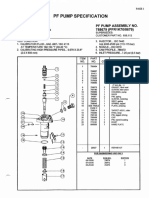
- PF Pump Specification: STM - Ynee"Document2 paginiPF Pump Specification: STM - Ynee"Miguel RojasÎncă nu există evaluări
- Engine allocation guide for MAN vehicle seriesDocument4 paginiEngine allocation guide for MAN vehicle seriesezeizabarrenaÎncă nu există evaluări
- ConclusionDocument1 paginăConclusionFrancis John DavidÎncă nu există evaluări
- Rimmer Rover V8 Engine CatalogueDocument46 paginiRimmer Rover V8 Engine CatalogueTony Capuano100% (1)
- BMW 530i M Sport Specs & PricingDocument2 paginiBMW 530i M Sport Specs & PricingNicolas NgÎncă nu există evaluări
- UK Purchased: Fire Pump EnginesDocument9 paginiUK Purchased: Fire Pump EnginesZulhanif ZulhanifÎncă nu există evaluări