S-ar putea să vă placă și
- Répartition: AnnuelleDocument1 paginăRépartition: AnnuelleKoik KoikÎncă nu există evaluări
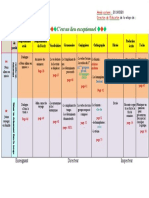
- C'est Un Lieu Exceptionnel C'est Un Lieu Exceptionnel C'est Un Lieu Exceptionnel C'est Un Lieu ExceptionnelDocument1 paginăC'est Un Lieu Exceptionnel C'est Un Lieu Exceptionnel C'est Un Lieu Exceptionnel C'est Un Lieu ExceptionnelKoik KoikÎncă nu există evaluări
- 3ap p3s3Document8 pagini3ap p3s3Koik KoikÎncă nu există evaluări
- 3ap p1s2Document7 pagini3ap p1s2Koik KoikÎncă nu există evaluări
- Chapitre 3 PPTDocument21 paginiChapitre 3 PPTMed Djameleddine BougrineÎncă nu există evaluări
- 17 Cours Arduino c1Document8 pagini17 Cours Arduino c1Courtney OdomÎncă nu există evaluări
- Classement Enseignants Logements Juillet2014Document41 paginiClassement Enseignants Logements Juillet2014Koik KoikÎncă nu există evaluări
- Pollution Harmo Cem PR PDFDocument8 paginiPollution Harmo Cem PR PDFKoik KoikÎncă nu există evaluări
- It10exerc1 Enonce CPPDocument5 paginiIt10exerc1 Enonce CPPKoik KoikÎncă nu există evaluări
- Copie de Motorisation ElectriqueDocument31 paginiCopie de Motorisation ElectriqueKoik KoikÎncă nu există evaluări
- It10exerc1 Enonce CPPDocument5 paginiIt10exerc1 Enonce CPPKoik KoikÎncă nu există evaluări
- PRONYDocument13 paginiPRONYKoik KoikÎncă nu există evaluări
- Chapitre 3 PPTDocument21 paginiChapitre 3 PPTMed Djameleddine BougrineÎncă nu există evaluări
- 4AA06 SigAleat SystLin 1314Document38 pagini4AA06 SigAleat SystLin 1314Koik KoikÎncă nu există evaluări
- Brevet US6391345 - Cranberry Seed Oil, Cranberry Seed Flour and A Method For Making - Google BrevetsDocument6 paginiBrevet US6391345 - Cranberry Seed Oil, Cranberry Seed Flour and A Method For Making - Google BrevetsKoik KoikÎncă nu există evaluări
- Origines de La ScienceDocument7 paginiOrigines de La SciencehaÎncă nu există evaluări
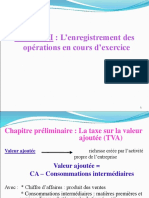
- Les Operations CourantesDocument67 paginiLes Operations CourantesYoussefOulaajeb100% (1)
- Chapitre 2Document30 paginiChapitre 2kitetaj571Încă nu există evaluări
- ADocument24 paginiALemallemÎncă nu există evaluări
- Présentation Variateurs-MoteursDocument35 paginiPrésentation Variateurs-Moteurskhaled kamel BouabdallahÎncă nu există evaluări
- Chapitre 06 SPECIFICATION DES STRUCTURES EN BETON ARMEDocument23 paginiChapitre 06 SPECIFICATION DES STRUCTURES EN BETON ARMEslimane100% (1)
- Choux ChantillyDocument2 paginiChoux Chantillyboiskapla123Încă nu există evaluări
- EXP Doc MaintenanceDocument2 paginiEXP Doc MaintenanceAyoub OUBAHAÎncă nu există evaluări
- SIG Et Télédétection - 2021Document72 paginiSIG Et Télédétection - 2021Gloire NgamikaÎncă nu există evaluări
- StatiqueDocument27 paginiStatiqueHalim Genie CivilÎncă nu există evaluări
- Capture D'écran . 2022-06-08 À 14.15.05Document5 paginiCapture D'écran . 2022-06-08 À 14.15.05Nina MessiaenÎncă nu există evaluări
- Serie #1 G.M EmiDocument1 paginăSerie #1 G.M EmiAYA OUEZGANÎncă nu există evaluări
- EnsoleillementDocument20 paginiEnsoleillementJn OumiÎncă nu există evaluări
- Alchimie Et Chimie PDFDocument40 paginiAlchimie Et Chimie PDFfuzzy_slugÎncă nu există evaluări
- Examen 3Document3 paginiExamen 3MoulayMoulyÎncă nu există evaluări
- Livre Blanc Autodesk-Bonnes Pratiques BIM-Revit-IfCDocument14 paginiLivre Blanc Autodesk-Bonnes Pratiques BIM-Revit-IfCBrice Patrice GollyÎncă nu există evaluări
- Exploration Du Métabolisme Lipidique-2 PDFDocument13 paginiExploration Du Métabolisme Lipidique-2 PDFahmed djellabÎncă nu există evaluări
- Aos 2008243 P 239Document10 paginiAos 2008243 P 239aminaÎncă nu există evaluări
- Mémoire de Master: ThèmeDocument77 paginiMémoire de Master: ThèmeJosué Ilunga tshibumbuÎncă nu există evaluări
- Chaouadi Lyes, Haoua SofianeDocument107 paginiChaouadi Lyes, Haoua SofianeHoucine BelhaskaÎncă nu există evaluări
- Travaux Dirigés Des Transferts ThermiquesDocument2 paginiTravaux Dirigés Des Transferts ThermiquesMahj Ayou100% (1)
- Antennes SiloDocument29 paginiAntennes Silowafa wafaÎncă nu există evaluări
- Compte Rendu Module GRDocument16 paginiCompte Rendu Module GRReda Farouk ELaidiÎncă nu există evaluări
- II-275-Péritonite AiguëDocument11 paginiII-275-Péritonite AiguëNemo LuÎncă nu există evaluări
- BORGOUDocument23 paginiBORGOUSam RichÎncă nu există evaluări
- Chimie Des Polymères (2° Éd.) : Exercices Et Problèmes CorrigésDocument3 paginiChimie Des Polymères (2° Éd.) : Exercices Et Problèmes Corrigészina allaouaÎncă nu există evaluări
- CE1 Hist - l1 - Le JourDocument6 paginiCE1 Hist - l1 - Le JourYoman Arthur verdier AssuiÎncă nu există evaluări
- الإمتحان الجهوي في الرياضيات الثالثة اعدادي 2022 جهة الشرق بالفرنسيةDocument3 paginiالإمتحان الجهوي في الرياضيات الثالثة اعدادي 2022 جهة الشرق بالفرنسيةHind AfassiÎncă nu există evaluări
- Les Formes Sen Melent HoptoysDocument12 paginiLes Formes Sen Melent Hoptoyscodestudent405Încă nu există evaluări
- Bilan Fonctionnel - Les 6 Scénarios PossiblesDocument1 paginăBilan Fonctionnel - Les 6 Scénarios PossiblesLAILA BNÎncă nu există evaluări