S-ar putea să vă placă și
- Box Transport MechanismDocument41 paginiBox Transport MechanismsaijanÎncă nu există evaluări
- Electric Motors and Drives: Fundamentals, Types and ApplicationsDe la EverandElectric Motors and Drives: Fundamentals, Types and ApplicationsEvaluare: 4.5 din 5 stele4.5/5 (12)
- Design and Fabrication of Box Transport Mechanism PDFDocument5 paginiDesign and Fabrication of Box Transport Mechanism PDFBharathÎncă nu există evaluări
- Robotics: Designing the Mechanisms for Automated MachineryDe la EverandRobotics: Designing the Mechanisms for Automated MachineryEvaluare: 4.5 din 5 stele4.5/5 (8)
- Box Transport MechanismDocument36 paginiBox Transport MechanismInzi Gardezi81% (16)
- Design and Simulation of Box Transport Mechanism PDFDocument3 paginiDesign and Simulation of Box Transport Mechanism PDFInternational Journal of Innovative Science and Research TechnologyÎncă nu există evaluări
- Design and Development of Box Shifting Mechanism Using Gearless Power Transmission System1Document5 paginiDesign and Development of Box Shifting Mechanism Using Gearless Power Transmission System1International Journal of Innovative Science and Research TechnologyÎncă nu există evaluări
- Box Transport Mechanisum (Handle) ReportDocument48 paginiBox Transport Mechanisum (Handle) ReportMayugam InfotechÎncă nu există evaluări
- Automatic Workpart Transfer MechanismDocument7 paginiAutomatic Workpart Transfer MechanismIJRASETPublicationsÎncă nu există evaluări
- Development of Gearless-04052022-3Document5 paginiDevelopment of Gearless-04052022-3madhanreddy953Încă nu există evaluări
- 372.design of Chain Conveyor System and Analysis by FEMDocument6 pagini372.design of Chain Conveyor System and Analysis by FEMlwinkyawmin222Încă nu există evaluări
- Irjet V5i1014Document7 paginiIrjet V5i1014Yuva NÎncă nu există evaluări
- Can CrusherDocument42 paginiCan CrusherParveen Jaat100% (2)
- RCB Bhad Mein JayeDocument3 paginiRCB Bhad Mein Jayeavengerscaptain2656Încă nu există evaluări
- BOX TRANSFER MECHANISM DESIGNDocument9 paginiBOX TRANSFER MECHANISM DESIGNsachin bibhishan parkheÎncă nu există evaluări
- Compliant Crimper - FinalDocument19 paginiCompliant Crimper - FinalUllas UÎncă nu există evaluări
- Project Report Box Transport MechanismDocument33 paginiProject Report Box Transport MechanismAjay KashyapÎncă nu există evaluări
- Design and Fabrication of Multi Process Machine Using Scotsh Yoke Mechanism IJERTCONV7IS06031Document2 paginiDesign and Fabrication of Multi Process Machine Using Scotsh Yoke Mechanism IJERTCONV7IS06031Sushant GhurupÎncă nu există evaluări
- MPM Research PaperDocument5 paginiMPM Research PaperPratik TyagiÎncă nu există evaluări
- journalsresaim,+IJRESM_V3_I8_97Document3 paginijournalsresaim,+IJRESM_V3_I8_97maryarpithajkÎncă nu există evaluări
- Mechanics 2: IndexDocument4 paginiMechanics 2: IndexescriboalprofeÎncă nu există evaluări
- Fabrication of Mini Conveyor Using Mechanical (Geneva) Mechanism4Document14 paginiFabrication of Mini Conveyor Using Mechanical (Geneva) Mechanism4Nilesh patilÎncă nu există evaluări
- IRJET V6I1223620200108 103777 1f80cck With Cover Page v2Document4 paginiIRJET V6I1223620200108 103777 1f80cck With Cover Page v2Team LegendsÎncă nu există evaluări
- Core Cutting Machine Ijariie12718Document5 paginiCore Cutting Machine Ijariie12718Habteyes AbateÎncă nu există evaluări
- MD Report Project FinalDocument12 paginiMD Report Project FinalfawadÎncă nu există evaluări
- 2024-03-03 DMU MM Day 5 Lecture NoteDocument21 pagini2024-03-03 DMU MM Day 5 Lecture Noteambandu74Încă nu există evaluări
- Ijetae 0615 33Document8 paginiIjetae 0615 33ayoub elkebir63Încă nu există evaluări
- 216-Article Text-404-1-10-20200827Document3 pagini216-Article Text-404-1-10-20200827BADINEHALSANDEEPÎncă nu există evaluări
- Design Analysis of Spring and Cam Follower Mechanism: June 2020Document5 paginiDesign Analysis of Spring and Cam Follower Mechanism: June 2020Abiola AjayiÎncă nu există evaluări
- 89 Research Paper PDFDocument5 pagini89 Research Paper PDFsnehax2Încă nu există evaluări
- Analysis and Simulation of The Electrical-DifferenDocument16 paginiAnalysis and Simulation of The Electrical-DifferenVan VuÎncă nu există evaluări
- Design and Development of Hydraulic Solar Tracking SystemDocument5 paginiDesign and Development of Hydraulic Solar Tracking Systemshubhi kaddyÎncă nu există evaluări
- Luk k7 Chap12 PDFDocument14 paginiLuk k7 Chap12 PDFMarran AlmarraniÎncă nu există evaluări
- In-Pipe Inspection Robot DesignDocument4 paginiIn-Pipe Inspection Robot DesignMilos BubanjaÎncă nu există evaluări
- Bearing Life Enhancement of Motor in Overhead Conveyor Using Vibration AnalysisDocument6 paginiBearing Life Enhancement of Motor in Overhead Conveyor Using Vibration Analysisabdul ghoniÎncă nu există evaluări
- Gradfinal Mech2to1Document5 paginiGradfinal Mech2to1Ram KrishnanÎncă nu există evaluări
- Automation & Robotics (RME078) : Lecture Notes OnDocument10 paginiAutomation & Robotics (RME078) : Lecture Notes Onمقدس ألم Μυφυαδδας ΑιαΜÎncă nu există evaluări
- 360 Degree Conveyor Belt PDFDocument4 pagini360 Degree Conveyor Belt PDFUpendra BingundiÎncă nu există evaluări
- Design of Electro Mechanical ActuatorsDocument17 paginiDesign of Electro Mechanical Actuatorsmohdbaseerullah123Încă nu există evaluări
- Trolley Turning and Lifting Mechanism: Ayneendra B, Mohd Salman, Jimmy Thaddeus Ojyok Attari, Marvan EDocument8 paginiTrolley Turning and Lifting Mechanism: Ayneendra B, Mohd Salman, Jimmy Thaddeus Ojyok Attari, Marvan ERahul PrasadÎncă nu există evaluări
- Introduction of Gears:: 1.2 Gears For Parallel ShaftsDocument16 paginiIntroduction of Gears:: 1.2 Gears For Parallel ShaftsnareshÎncă nu există evaluări
- Aakelian LeBaron Mkrtchyan 2015Document9 paginiAakelian LeBaron Mkrtchyan 2015Rohit JagadaleÎncă nu există evaluări
- Compliant 1Document10 paginiCompliant 1rinki3253298Încă nu există evaluări
- Speed Breaker 1Document6 paginiSpeed Breaker 1AbhishekÎncă nu există evaluări
- Design and Development of A Low-Cost Exure-Based Hand-Held Mechanism For MicromanipulationDocument7 paginiDesign and Development of A Low-Cost Exure-Based Hand-Held Mechanism For MicromanipulationDamián Cortina LópezÎncă nu există evaluări
- Nmce, PethDocument54 paginiNmce, PethAKSHAY NANGARE-PATILÎncă nu există evaluări
- Chapter 5. Planar LinkagesDocument8 paginiChapter 5. Planar LinkagesBasudeb ShitÎncă nu există evaluări
- Kinematics Synthesis of A New Generation of RapidDocument30 paginiKinematics Synthesis of A New Generation of RapidNada GhammemÎncă nu există evaluări
- Paper 1Document7 paginiPaper 1EADummyÎncă nu există evaluări
- ProceedingsDocument7 paginiProceedingsEsmfÎncă nu există evaluări
- Using DRV To Drive Solenoids - DRV8876/DRV8702-Q1/DRV8343-Q1Document13 paginiUsing DRV To Drive Solenoids - DRV8876/DRV8702-Q1/DRV8343-Q1cutoÎncă nu există evaluări
- Modelling and Structural Analysis of Planetary Geared Winch: Aditya Nigam, Sandeep JainDocument4 paginiModelling and Structural Analysis of Planetary Geared Winch: Aditya Nigam, Sandeep JainRonaldo KasperÎncă nu există evaluări
- Design of Multi Utility Zero Slip Gripper Device Using Worm ArrangementDocument4 paginiDesign of Multi Utility Zero Slip Gripper Device Using Worm ArrangementInternational Journal of Innovative Science and Research TechnologyÎncă nu există evaluări
- ME 7 - Activity 5Document5 paginiME 7 - Activity 5Rygen Faye Del RosarioÎncă nu există evaluări
- ST1503 020Document7 paginiST1503 020MainãÎncă nu există evaluări
- Irjet V9i3271Document4 paginiIrjet V9i3271scdindar3838Încă nu există evaluări
- Problem DefinitionDocument3 paginiProblem DefinitionGaurav PawarÎncă nu există evaluări
- FEM Analysis On Locomotive Train Brake For Improved Efficiency by Using CATIA and ANSYS-WorkbenchDocument7 paginiFEM Analysis On Locomotive Train Brake For Improved Efficiency by Using CATIA and ANSYS-WorkbenchAchraf MoutaharÎncă nu există evaluări
- International Journal For Research in Mechanical & Civil Engineering ISSN: 2208-2727Document8 paginiInternational Journal For Research in Mechanical & Civil Engineering ISSN: 2208-2727கௌதம் முருகன்Încă nu există evaluări
- Speed of Cutting Wheel (N)Document3 paginiSpeed of Cutting Wheel (N)Jeevan Landge PatilÎncă nu există evaluări
- Reuse of Plastic Waste in Paver BlocksDocument3 paginiReuse of Plastic Waste in Paver BlocksMehran Amin BattÎncă nu există evaluări
- Cutting Forces and Design of a Rice Stalk Cutting SystemDocument7 paginiCutting Forces and Design of a Rice Stalk Cutting SystemJeevan Landge PatilÎncă nu există evaluări
- Eight link Bottle shifting conveyor mechanismDocument59 paginiEight link Bottle shifting conveyor mechanismJeevan Landge PatilÎncă nu există evaluări
- 4.abrasive Belt GrinderDocument63 pagini4.abrasive Belt GrinderIyappan Alagappan67% (15)
- Drawing1 PDFDocument1 paginăDrawing1 PDFJeevan Landge PatilÎncă nu există evaluări
- Maximum Weight of Single Man 100 KGDocument4 paginiMaximum Weight of Single Man 100 KGJeevan Landge PatilÎncă nu există evaluări
- Literature Review On Different Plastic Waste Materials Use in ConcreteDocument4 paginiLiterature Review On Different Plastic Waste Materials Use in ConcreteAkshay NivaleÎncă nu există evaluări
- PaverDocument29 paginiPaverJeevan Landge PatilÎncă nu există evaluări
- E BicycleDocument44 paginiE BicycleJeevan Landge PatilÎncă nu există evaluări
- Design Calculations:: 5.1 Selection of Material For FrameDocument7 paginiDesign Calculations:: 5.1 Selection of Material For FrameJeevan Landge PatilÎncă nu există evaluări
- Design Calculations:: 5.1 Selection of Material For FrameDocument7 paginiDesign Calculations:: 5.1 Selection of Material For FrameJeevan Landge PatilÎncă nu există evaluări
- ShaftDocument3 paginiShaftJeevan Landge PatilÎncă nu există evaluări
- Drawing 1Document7 paginiDrawing 1Jeevan Landge PatilÎncă nu există evaluări
- IJSART - Design and Fabrication of a Multipurpose Farming MachineDocument14 paginiIJSART - Design and Fabrication of a Multipurpose Farming MachineJeevan Landge Patil100% (1)
- Design Calculations:: 5.1 Selection of Material For FrameDocument2 paginiDesign Calculations:: 5.1 Selection of Material For FrameJeevan Landge PatilÎncă nu există evaluări
- MPC Mechatronics Project Consultancy for College StudentsDocument1 paginăMPC Mechatronics Project Consultancy for College StudentsJeevan Landge PatilÎncă nu există evaluări
- ShaftDocument3 paginiShaftJeevan Landge PatilÎncă nu există evaluări
- 4.abrasive Belt GrinderDocument63 pagini4.abrasive Belt GrinderIyappan Alagappan67% (15)
- ShaftDocument48 paginiShaftJeevan Landge PatilÎncă nu există evaluări
- Automatic Pneumatic Braking and Bumper SystemDocument46 paginiAutomatic Pneumatic Braking and Bumper SystemJeevan Landge PatilÎncă nu există evaluări
- ShaftDocument48 paginiShaftJeevan Landge PatilÎncă nu există evaluări
- MouldingDocument5 paginiMouldingJeevan Landge PatilÎncă nu există evaluări
- ShaftDocument3 paginiShaftJeevan Landge PatilÎncă nu există evaluări
- MouldingDocument5 paginiMouldingJeevan Landge PatilÎncă nu există evaluări
- AdsdsasdDocument2 paginiAdsdsasdJeevan Landge PatilÎncă nu există evaluări
- AngleDocument3 paginiAngleJeevan Landge PatilÎncă nu există evaluări
- Design of Mini Compressorless Solar Powered Refrigerator: Project Report ONDocument36 paginiDesign of Mini Compressorless Solar Powered Refrigerator: Project Report ONJeevan Landge PatilÎncă nu există evaluări
- Rectangular Tapered Hopper VolumeDocument1 paginăRectangular Tapered Hopper VolumeJeevan Landge PatilÎncă nu există evaluări
- Determining of Your System Specifi Cations and ConditionsDocument1 paginăDetermining of Your System Specifi Cations and ConditionsJeevan Landge PatilÎncă nu există evaluări
- Crank Specifications PDFDocument1 paginăCrank Specifications PDFLinzaw OoÎncă nu există evaluări
- Diesel Engine and Components: Series Paragraphs 51-53Document9 paginiDiesel Engine and Components: Series Paragraphs 51-53Branko MikulinjakÎncă nu există evaluări
- Disassembly and Assembly PERKINS DIESEL ENGINE 1106DDocument180 paginiDisassembly and Assembly PERKINS DIESEL ENGINE 1106Dmliugong81% (16)
- Optra LT 2008 1.6Document250 paginiOptra LT 2008 1.6carlos martinez100% (11)
- Uttam ReportDocument15 paginiUttam ReportSangram RegadeÎncă nu există evaluări
- SC11CB220G2B1发动机零部件图册Document132 paginiSC11CB220G2B1发动机零部件图册Ronald Alexis Hernandez Sabogal100% (1)
- 10 Frame Piston Pump: SpecificationsDocument4 pagini10 Frame Piston Pump: SpecificationsSugeng Ciko DarmintoÎncă nu există evaluări
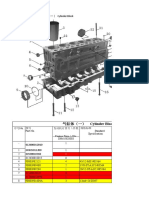
- Cylinder Block and Related Components BreakdownDocument66 paginiCylinder Block and Related Components BreakdownP.p. Arul IlancheeranÎncă nu există evaluări
- Service Manual 6Wg1-Tc (Common Rail) Isuzu EngineDocument224 paginiService Manual 6Wg1-Tc (Common Rail) Isuzu EngineVladis0710100% (1)
- Piaggio MP3 300 I e LT en PDFDocument360 paginiPiaggio MP3 300 I e LT en PDFMiroÎncă nu există evaluări
- BJ Cicada: Bore: Stroke: Displacement: 0.437" (11.10mm) 0.554" (14.07mm) 0.093 Cuin (1.362cc)Document5 paginiBJ Cicada: Bore: Stroke: Displacement: 0.437" (11.10mm) 0.554" (14.07mm) 0.093 Cuin (1.362cc)Vignesh WaranÎncă nu există evaluări
- Parts Manual: Gas Engine Models: WP10GNA, Bi-FuelDocument114 paginiParts Manual: Gas Engine Models: WP10GNA, Bi-FuelKurd SkorvskiÎncă nu există evaluări
- Components or Parts of IC Engine With Its Function PDFDocument9 paginiComponents or Parts of IC Engine With Its Function PDFMilbert Vaz AlfonsoÎncă nu există evaluări
- TBD 645, WH, enDocument160 paginiTBD 645, WH, enTansu MavunacıÎncă nu există evaluări
- Volkswagen-Maintenance Case Circuit Data Book - 01 Trang 41-80Document40 paginiVolkswagen-Maintenance Case Circuit Data Book - 01 Trang 41-80Vinh Dau Nguyen VanÎncă nu există evaluări
- FP Diesel Trusted Technology BrochureDocument3 paginiFP Diesel Trusted Technology BrochureDiogo FaccioliÎncă nu există evaluări
- Epcdh6m11d0003 en GeneralDocument127 paginiEpcdh6m11d0003 en GeneralDan RosoiuÎncă nu există evaluări
- Vertical Ammonia CompressorsDocument41 paginiVertical Ammonia CompressorsIulian12345Încă nu există evaluări
- Cylinder Block Inspection and Repair GuideDocument46 paginiCylinder Block Inspection and Repair GuideNikkikumar MaisuriyaÎncă nu există evaluări
- Ford Motorcraft Diesel EnginesDocument13 paginiFord Motorcraft Diesel EngineshuskerchampsÎncă nu există evaluări
- IPL, Briggs, 14B907-0110-B1, 950 Series, EngineDocument25 paginiIPL, Briggs, 14B907-0110-B1, 950 Series, EngineGiacomo DesideriÎncă nu există evaluări
- Seatonic 6AW 1014695 CatalogoDocument71 paginiSeatonic 6AW 1014695 Catalogojorge alonsoÎncă nu există evaluări
- Catalogo de Códigos Do Compressor 3CDCDocument20 paginiCatalogo de Códigos Do Compressor 3CDCEvandro MatosoÎncă nu există evaluări
- EM - DX12 - Engine Manual (950106-072001EN) - ENDocument140 paginiEM - DX12 - Engine Manual (950106-072001EN) - ENIfan saputroÎncă nu există evaluări
- Renr7167 02 01 All PDFDocument44 paginiRenr7167 02 01 All PDFИгорь СамоукинÎncă nu există evaluări
- Lexus Engine 1UZ FE Service and Repair ManualDocument80 paginiLexus Engine 1UZ FE Service and Repair Manualeamon100% (2)
- Himsen Cat h1728Document12 paginiHimsen Cat h1728Mohsen100% (1)
- Motor Korando g20dfDocument36 paginiMotor Korando g20dfNicolas MendezÎncă nu există evaluări
- Chapter 28Document11 paginiChapter 28biopoweredÎncă nu există evaluări
- NA Compressor PartsDocument4 paginiNA Compressor PartsCelso Fernandes BentoÎncă nu există evaluări