S-ar putea să vă placă și
- Discontinued Products & MaintenanceDocument3 paginiDiscontinued Products & MaintenanceZafar Yab100% (1)
- D80149GC20 sg2Document322 paginiD80149GC20 sg2Seigneuret MIEHAKANDA100% (1)
- Microsoft Excel 2019 Made Simple PDFDocument239 paginiMicrosoft Excel 2019 Made Simple PDFJorge Sandoval Flores100% (4)
- Debeg3400 SME PDFDocument72 paginiDebeg3400 SME PDFadavit73Încă nu există evaluări
- Watchman Navgard BNWAS Operation Installation Manual PDFDocument46 paginiWatchman Navgard BNWAS Operation Installation Manual PDFlucas barriosÎncă nu există evaluări
- Felcom12 PDFDocument118 paginiFelcom12 PDFGeta EnacheÎncă nu există evaluări
- Far3000 Installation ManualDocument167 paginiFar3000 Installation ManualcostinosÎncă nu există evaluări
- Manual KW960 Iss01 Rev09Document20 paginiManual KW960 Iss01 Rev09Эдуард Щаев100% (1)
- Tn-95-180085-A vhf7222 SW 106Document3 paginiTn-95-180085-A vhf7222 SW 106Sarath PavithranÎncă nu există evaluări
- CH Programming FM 8900Document2 paginiCH Programming FM 8900Zafar YabÎncă nu există evaluări
- Compiler Design: Practical FileDocument43 paginiCompiler Design: Practical FileManish Kumar Chouriya88% (8)
- SRG 1150dnallDocument25 paginiSRG 1150dnallСергей ЧерёмухинÎncă nu există evaluări
- MDC-7000 7900 OME Rev06Document244 paginiMDC-7000 7900 OME Rev06pppÎncă nu există evaluări
- DBS 00251 Inspectors Manual For Voyage Master II S-VDR PQDocument18 paginiDBS 00251 Inspectors Manual For Voyage Master II S-VDR PQEmannuel SouzaÎncă nu există evaluări
- Thrane Thrane Sailor Rt2130 - Service ManualDocument138 paginiThrane Thrane Sailor Rt2130 - Service ManualJadi PurwonoÎncă nu există evaluări
- Cloud Computing Chapter 19Document31 paginiCloud Computing Chapter 19ghar_dashÎncă nu există evaluări
- Distribution Unit 138-118 Service ManualDocument27 paginiDistribution Unit 138-118 Service ManualBeneDict Ben DÎncă nu există evaluări
- 4.speed Log DS50 PDFDocument28 pagini4.speed Log DS50 PDFinderÎncă nu există evaluări
- Samsung LTE QoSDocument27 paginiSamsung LTE QoSmohamed100% (1)
- Enterprise Test Automation VisionDocument7 paginiEnterprise Test Automation VisionInfosysÎncă nu există evaluări
- IBUCDocument293 paginiIBUCgermancho81Încă nu există evaluări
- mdc721 e PDFDocument2 paginimdc721 e PDFNesil AbieraÎncă nu există evaluări
- MX 400 GPS U ManualDocument231 paginiMX 400 GPS U ManualetchegarayfÎncă nu există evaluări
- 03 - TRAINING PROGRAM - SCS Operation & Troubleshooting For S8Document54 pagini03 - TRAINING PROGRAM - SCS Operation & Troubleshooting For S8cristianocalheiros100% (1)
- 18x4C 19x4C 1920C Operator S Manual-HDocument242 pagini18x4C 19x4C 1920C Operator S Manual-HtansamaserÎncă nu există evaluări
- HIS 770B Series-User ManualDocument33 paginiHIS 770B Series-User ManualVishwas MaritronicsÎncă nu există evaluări
- Standard22 Gyro Compass PDFDocument4 paginiStandard22 Gyro Compass PDFBranko RadovicÎncă nu există evaluări
- Jma 9900 PDFDocument15 paginiJma 9900 PDFBhavin DoshiÎncă nu există evaluări
- Dsas-Mk2 PolestarDocument2 paginiDsas-Mk2 PolestarPalaKhartikeyan0% (1)
- RD30 Installation Manual PDFDocument22 paginiRD30 Installation Manual PDFRic CastroÎncă nu există evaluări
- Furuno FS5000 SSB Radiotelephone PamphletDocument4 paginiFuruno FS5000 SSB Radiotelephone PamphletWahyusnkyahoo.com 64939Abimanyu100% (1)
- JMA-5200mk2 Installation ManualDocument156 paginiJMA-5200mk2 Installation ManualGOGO COllZZssÎncă nu există evaluări
- ST-100A ST-200A: Operation ManualDocument148 paginiST-100A ST-200A: Operation ManualsunhuynhÎncă nu există evaluări
- Blind Anthea Operation and Installation ManualDocument62 paginiBlind Anthea Operation and Installation Manualadavit73Încă nu există evaluări
- FSV35 Installation Manual B1Document66 paginiFSV35 Installation Manual B1Miguel PerezÎncă nu există evaluări
- SAILOR 6282 AIS Transponder SAILOR 6280/6281 AIS System: User ManualDocument90 paginiSAILOR 6282 AIS Transponder SAILOR 6280/6281 AIS System: User ManualRomeish KelaartÎncă nu există evaluări
- SC60 SC120 Service ManualDocument60 paginiSC60 SC120 Service Manualemilio gustavo saez duroÎncă nu există evaluări
- Consilium - VDR F1Document6 paginiConsilium - VDR F1anusprasadÎncă nu există evaluări
- FleetData Installation Guide - Non Danelec VDR - DBS13047-14Document38 paginiFleetData Installation Guide - Non Danelec VDR - DBS13047-14YCFÎncă nu există evaluări
- Scancomm 2.2 Skanti: Radiotelex System For GMDSSDocument54 paginiScancomm 2.2 Skanti: Radiotelex System For GMDSSAndaç ÖzkanÎncă nu există evaluări
- modFELCOM 15 LRIT Checking ProcedureDocument3 paginimodFELCOM 15 LRIT Checking ProcedurePriteshÎncă nu există evaluări
- Inmarsat-C DNID Management Tool User Manual: Version 4.0 July 2010Document19 paginiInmarsat-C DNID Management Tool User Manual: Version 4.0 July 2010HaddÎncă nu există evaluări
- I-com-MR-1210R2 T2 T3 0 - Instruction ManualDocument80 paginiI-com-MR-1210R2 T2 T3 0 - Instruction ManualNishant PandyaÎncă nu există evaluări
- Interfase Navitron NT990 ASI para AutopilotoDocument2 paginiInterfase Navitron NT990 ASI para AutopilotopevalpevalÎncă nu există evaluări
- SAILOR 6120 - 30 - 40 - 50 System Installation Manual SEP11Document90 paginiSAILOR 6120 - 30 - 40 - 50 System Installation Manual SEP11Viliame D RoqicaÎncă nu există evaluări
- PT200 ManualDocument160 paginiPT200 ManualIvan IntroÎncă nu există evaluări
- GSU-36 Series: GPS Receiver ModuleDocument2 paginiGSU-36 Series: GPS Receiver Modulejaliltaghdareh0% (1)
- 36 RH-3032 (Manual)Document71 pagini36 RH-3032 (Manual)Nguyen Phuoc HoÎncă nu există evaluări
- MCX 5000'SDocument42 paginiMCX 5000'STammy Jim Tanjutco100% (1)
- JRC Jfe 582 - Install Transducer PDFDocument6 paginiJRC Jfe 582 - Install Transducer PDFleducthinh65Încă nu există evaluări
- JMA-5206-HS JMA-5210-4-6HS JMA-5220-7-9 Instruction Manual PDFDocument462 paginiJMA-5206-HS JMA-5210-4-6HS JMA-5220-7-9 Instruction Manual PDFNesil AbieraÎncă nu există evaluări
- Stock Update ListDocument52 paginiStock Update Listricky100% (3)
- DEIF Wind Measuring SystemDocument4 paginiDEIF Wind Measuring Systemzlovic6806160% (1)
- FA150 Service Manual D1 1-15Document277 paginiFA150 Service Manual D1 1-15VitaliyÎncă nu există evaluări
- JUE-95LT Installation ManualDocument86 paginiJUE-95LT Installation ManualManuel VelezÎncă nu există evaluări
- 4423 Magnetsonde 108-010 PDFDocument90 pagini4423 Magnetsonde 108-010 PDFОлег ЛемешкоÎncă nu există evaluări
- DM200 - DM400 System OverviewDocument25 paginiDM200 - DM400 System OverviewMorimotoSanyoÎncă nu există evaluări
- SSA-easyTrack Configuration Tool Ver. 1.02 PDFDocument2 paginiSSA-easyTrack Configuration Tool Ver. 1.02 PDFGeta Enache100% (1)
- HE-1500Di HE-7300Di Transducer SetupDocument7 paginiHE-1500Di HE-7300Di Transducer SetupManuel Diaz GomezÎncă nu există evaluări
- Zelio GSM PDFDocument18 paginiZelio GSM PDFAhmed El TayebÎncă nu există evaluări
- Navigational Equipment Stock ListDocument10 paginiNavigational Equipment Stock ListJahangir HosenÎncă nu există evaluări
- Sailor VHF c4900 Installation ManualDocument24 paginiSailor VHF c4900 Installation ManualKp Nair100% (1)
- CMZ500T3 BW 299Document153 paginiCMZ500T3 BW 299toumassis_p100% (1)
- IM-80B12R08-E MKR-181A ManualDocument100 paginiIM-80B12R08-E MKR-181A ManualRob Verdoold100% (1)
- Cause Codes UMTSDocument9 paginiCause Codes UMTSfireincitadelÎncă nu există evaluări
- Network CauseDocument10 paginiNetwork CauseГеоргий МоканÎncă nu există evaluări
- 3GPP Failure CauseDocument7 pagini3GPP Failure CauseSaidul IslamÎncă nu există evaluări
- TN 95-134496-B - SW - 211 - VHF502xDocument4 paginiTN 95-134496-B - SW - 211 - VHF502xZafar YabÎncă nu există evaluări
- Certificate of Type Approval: China Classification SocietyDocument3 paginiCertificate of Type Approval: China Classification SocietyZafar YabÎncă nu există evaluări
- CCS For Gyro CompassDocument3 paginiCCS For Gyro CompassZafar YabÎncă nu există evaluări
- Ais SartDocument2 paginiAis SartZafar YabÎncă nu există evaluări
- DTEx Marine Series A4 BrochureDocument4 paginiDTEx Marine Series A4 BrochureZafar YabÎncă nu există evaluări
- TECHNICAL BULLETIN International VHF Radio Telephone System With 4 Digit...Document1 paginăTECHNICAL BULLETIN International VHF Radio Telephone System With 4 Digit...Zafar YabÎncă nu există evaluări
- DTEx Marine Series QSG v1.6Document6 paginiDTEx Marine Series QSG v1.6Zafar YabÎncă nu există evaluări
- TB07 2009 AIS SART Test Rev 140311Document3 paginiTB07 2009 AIS SART Test Rev 140311Zafar YabÎncă nu există evaluări
- 10-Inch Daylight Radar: 1942 MARK-2Document2 pagini10-Inch Daylight Radar: 1942 MARK-2Zafar YabÎncă nu există evaluări
- Deckma Authorized Service Station - Metromac - 2023Document1 paginăDeckma Authorized Service Station - Metromac - 2023Zafar YabÎncă nu există evaluări
- JMA-9100 Instruction ManualDocument572 paginiJMA-9100 Instruction ManualLa DewaÎncă nu există evaluări
- Technical Description/Installation Manual Synchro/Stepper - NMEA Converter S2N U/N 9028CDocument20 paginiTechnical Description/Installation Manual Synchro/Stepper - NMEA Converter S2N U/N 9028CZafar YabÎncă nu există evaluări
- Transducers For F2000Document5 paginiTransducers For F2000Zafar YabÎncă nu există evaluări
- ACR Nauticast™ AIS: The Science of SurvivalDocument8 paginiACR Nauticast™ AIS: The Science of Survivalsrinu1984Încă nu există evaluări
- GMDSS Systems Part No Description of System Qty Per Shipset MF-HF System (Sailor-Cobham)Document2 paginiGMDSS Systems Part No Description of System Qty Per Shipset MF-HF System (Sailor-Cobham)Zafar YabÎncă nu există evaluări
- Open Trimode GaugingDocument30 paginiOpen Trimode GaugingZafar YabÎncă nu există evaluări
- Samyung srg-150dn srg-250dnDocument20 paginiSamyung srg-150dn srg-250dnZafar YabÎncă nu există evaluări
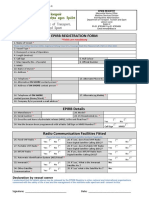
- Epirb Registration Form: Fields Are MandatoryDocument1 paginăEpirb Registration Form: Fields Are MandatoryZafar YabÎncă nu există evaluări
- Model NP-90MAX: Optional Smart Antenna (CSG-M8 GPS/Glonass) )Document2 paginiModel NP-90MAX: Optional Smart Antenna (CSG-M8 GPS/Glonass) )Zafar YabÎncă nu există evaluări
- BR - Iridium Pilot - Brochure - ENGDocument4 paginiBR - Iridium Pilot - Brochure - ENGZafar YabÎncă nu există evaluări
- Operator Manual: Simrad AP28 AutopilotDocument124 paginiOperator Manual: Simrad AP28 AutopilotZafar YabÎncă nu există evaluări
- Ship Autopilot ChiniesDocument1 paginăShip Autopilot ChiniesZafar YabÎncă nu există evaluări
- JRC 9132 Motor Driver Circuit DifferenceDocument1 paginăJRC 9132 Motor Driver Circuit DifferenceZafar YabÎncă nu există evaluări
- Sailor 98-1301278990Document1 paginăSailor 98-1301278990Zafar YabÎncă nu există evaluări
- Procudure For Testing Echo Sounder With Sim990 SimulatorDocument1 paginăProcudure For Testing Echo Sounder With Sim990 SimulatorZafar YabÎncă nu există evaluări
- Sailor 98-1304789Document1 paginăSailor 98-1304789Zafar YabÎncă nu există evaluări
- Sailor 98-147405Document1 paginăSailor 98-147405Zafar YabÎncă nu există evaluări
- Interconnection Diagram JRC 9132 (110-220)Document2 paginiInterconnection Diagram JRC 9132 (110-220)Zafar YabÎncă nu există evaluări
- Adobe Illustrator PresentationDocument8 paginiAdobe Illustrator PresentationGery Aditya NugrahaÎncă nu există evaluări
- Day 3 - Object Oriented ProgrammingDocument39 paginiDay 3 - Object Oriented ProgrammingyosefÎncă nu există evaluări
- MDX Modbus - Leroy Somer - 2011Document40 paginiMDX Modbus - Leroy Somer - 2011Manuel OrtegaÎncă nu există evaluări
- Android Ram AnalysisDocument14 paginiAndroid Ram Analysisjsmithy456Încă nu există evaluări
- ATSDocument10 paginiATSCong TranÎncă nu există evaluări
- NET101 Week 12 Wireless Technology2Document22 paginiNET101 Week 12 Wireless Technology2EDSYL JHON SARAGAÎncă nu există evaluări
- Oyo Business-AnalystDocument2 paginiOyo Business-AnalystHarshÎncă nu există evaluări
- (Ortu Et Al. 201x) The JIRA Repository Dataset - Understanding Social Aspects of Software DevelopmentDocument4 pagini(Ortu Et Al. 201x) The JIRA Repository Dataset - Understanding Social Aspects of Software DevelopmentEdouard_CarvalhoÎncă nu există evaluări
- BLIP: Bootstrapping Language-Image Pre-Training For Unified Vision-Language Understanding and GenerationDocument12 paginiBLIP: Bootstrapping Language-Image Pre-Training For Unified Vision-Language Understanding and Generationsky houndÎncă nu există evaluări
- PCEP™ - Certified Entry-Level Python Programmer (Exam PCEP-30-01) - EXAM SyllabusDocument5 paginiPCEP™ - Certified Entry-Level Python Programmer (Exam PCEP-30-01) - EXAM SyllabusendoecaÎncă nu există evaluări
- BIOMERIEUX - BacTAlert - 3D - Select LIS Interface Func Rqmts Rev A.00Document6 paginiBIOMERIEUX - BacTAlert - 3D - Select LIS Interface Func Rqmts Rev A.00Jose Perez PerezÎncă nu există evaluări
- Lte Network Scale and Capacity Measurement IJERTV2IS60549Document4 paginiLte Network Scale and Capacity Measurement IJERTV2IS60549Inter MilanÎncă nu există evaluări
- Cryptography and Network Security LTPC 3 0 0 3 Unit I Fundamentals 10Document4 paginiCryptography and Network Security LTPC 3 0 0 3 Unit I Fundamentals 10velsÎncă nu există evaluări
- Narrative ReportDocument41 paginiNarrative Reportern aquilizanÎncă nu există evaluări
- Security Part II: Auditing Database SystemsDocument38 paginiSecurity Part II: Auditing Database SystemsRose GalitÎncă nu există evaluări
- Process Navigator OverviewDocument16 paginiProcess Navigator OverviewdhanukattoorÎncă nu există evaluări
- Synergis Cloud Link: Complete Access ControlDocument2 paginiSynergis Cloud Link: Complete Access ControlJose Martin MotaÎncă nu există evaluări
- Ishan Isaa Lit Review PDFDocument12 paginiIshan Isaa Lit Review PDFPATNAM VENKATA SAI ISHAN 20BCT0014Încă nu există evaluări
- Standardisation Digital Transformation Power of Data!: Duncan AlexanderDocument51 paginiStandardisation Digital Transformation Power of Data!: Duncan AlexanderNadia Dyorota Magdalena AdyamcyzkovnaÎncă nu există evaluări
- OAF - Creating A Hello World Page (Basics) PDFDocument19 paginiOAF - Creating A Hello World Page (Basics) PDFNakul VenkatramanÎncă nu există evaluări
- Library Management System For Stanford UniversityDocument16 paginiLibrary Management System For Stanford Universityabhi jithÎncă nu există evaluări
- It 1352-Cryptography and Network Security Question PaperDocument2 paginiIt 1352-Cryptography and Network Security Question Paper11dreamerÎncă nu există evaluări
- Building Memristor Applications: From Device Model To Circuit DesignDocument9 paginiBuilding Memristor Applications: From Device Model To Circuit DesignGanagadhar CHÎncă nu există evaluări
- T4T 11 - Making The Most of MOOCs PSGNDocument3 paginiT4T 11 - Making The Most of MOOCs PSGNSobbooh Fatima GS AdminÎncă nu există evaluări