S-ar putea să vă placă și
- Sonnet User Manual v0.4 PDFDocument38 paginiSonnet User Manual v0.4 PDFLuis Eduardo JacomeÎncă nu există evaluări
- Model Relacional MYSQLDocument6 paginiModel Relacional MYSQLLuis Eduardo JacomeÎncă nu există evaluări
- Model Relacional MYSQLDocument6 paginiModel Relacional MYSQLLuis Eduardo JacomeÎncă nu există evaluări
- Model Relacional MYSQLDocument6 paginiModel Relacional MYSQLLuis Eduardo JacomeÎncă nu există evaluări
- 1957Document2 pagini1957Luis Eduardo JacomeÎncă nu există evaluări
- Model Relacional MYSQLDocument6 paginiModel Relacional MYSQLLuis Eduardo JacomeÎncă nu există evaluări
- Ahmad Ak If Adam MFP Ree 2015Document27 paginiAhmad Ak If Adam MFP Ree 2015Luis Eduardo JacomeÎncă nu există evaluări
- An Engine Enabling Location-Based Mobile Augmented Reality ApplicationsDocument16 paginiAn Engine Enabling Location-Based Mobile Augmented Reality ApplicationsLuis Eduardo JacomeÎncă nu există evaluări
- Advice For Using Your QRCode free-README PDFDocument1 paginăAdvice For Using Your QRCode free-README PDFLuis Eduardo JacomeÎncă nu există evaluări
- Manual Toshiba HDD 2TBDocument36 paginiManual Toshiba HDD 2TBLuis Eduardo JacomeÎncă nu există evaluări
- Location Based Augmented RealityDocument3 paginiLocation Based Augmented RealityLuis Eduardo JacomeÎncă nu există evaluări
- Manual Toshiba HDD 2TBDocument36 paginiManual Toshiba HDD 2TBLuis Eduardo JacomeÎncă nu există evaluări
- Two (2) Years (U.S. and Latin America) Standard Limited Warranty ("Limited Warranty") For Toshiba Branded Accessories and ElectronicsDocument6 paginiTwo (2) Years (U.S. and Latin America) Standard Limited Warranty ("Limited Warranty") For Toshiba Branded Accessories and Electronicscdla14Încă nu există evaluări
- Spring Framework ReferenceDocument590 paginiSpring Framework ReferenceGopinathÎncă nu există evaluări
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- RockMass Data Integration With Deswik - Mapping - Case StudyDocument11 paginiRockMass Data Integration With Deswik - Mapping - Case StudyCatarinoo100% (1)
- Current and Future Trends of Media and InformationDocument1 paginăCurrent and Future Trends of Media and Informationbugaspearl0Încă nu există evaluări
- Aki Järvinen The Audiovisual Elements and Styles in Computer and Video GamesDocument16 paginiAki Järvinen The Audiovisual Elements and Styles in Computer and Video GamesDiego AliasÎncă nu există evaluări
- Lacunarity Analysis of Raster Datasets ADocument12 paginiLacunarity Analysis of Raster Datasets ApedromolinasÎncă nu există evaluări
- Design and Fabrication of 3 Dimensional Printer - Project ReportDocument87 paginiDesign and Fabrication of 3 Dimensional Printer - Project ReportAlbert Francis100% (2)
- B.Voc in Multimedia & AnimationDocument6 paginiB.Voc in Multimedia & Animationvikas__ccÎncă nu există evaluări
- Spacecadet Tech Trends 2021Document91 paginiSpacecadet Tech Trends 2021André Teow100% (1)
- Internship Project: Autodesk AutocadDocument10 paginiInternship Project: Autodesk AutocadMohammed Abdul MujahidÎncă nu există evaluări
- DishonoredDocument4 paginiDishonoredFrancisco GarridoÎncă nu există evaluări
- Cs2401-Computer Graphics Question Bank Unit 1-2D PrimitivesDocument12 paginiCs2401-Computer Graphics Question Bank Unit 1-2D PrimitivesDhilip PrabakaranÎncă nu există evaluări
- Inception EssayDocument5 paginiInception Essaydew314Încă nu există evaluări
- Simpleware For Pavement Research: Case StudyDocument2 paginiSimpleware For Pavement Research: Case StudymehdiÎncă nu există evaluări
- Virtual Reality and Virtual EnvironmentsDocument43 paginiVirtual Reality and Virtual EnvironmentsvenkibossÎncă nu există evaluări
- Braz J Oral Sci-2023v22e230356Document14 paginiBraz J Oral Sci-2023v22e230356Tutor TaweesinÎncă nu există evaluări
- IJCIET TemplateDocument20 paginiIJCIET Templatebbot707Încă nu există evaluări
- Syed Resume AnimatorDocument2 paginiSyed Resume Animatorquanta18100% (2)
- Introducere Arena Visual DesignerDocument61 paginiIntroducere Arena Visual Designercosti cochet100% (1)
- Wiley - The Art of 3D Computer Animation and Effects, 4th Edition - 978-0-470-08490-8Document2 paginiWiley - The Art of 3D Computer Animation and Effects, 4th Edition - 978-0-470-08490-8nunu nalkavaleÎncă nu există evaluări
- Studio RM PDFDocument27 paginiStudio RM PDFMohammed JemlaÎncă nu există evaluări
- Release NotesDocument19 paginiRelease NotesFelipao Rengifo ArancibiaÎncă nu există evaluări
- EFI Optitex 3D Studio ServicesDocument2 paginiEFI Optitex 3D Studio ServicesAbrar aliÎncă nu există evaluări
- OpenGL Programming - Wikibooks, Open Books For An Open WorldDocument12 paginiOpenGL Programming - Wikibooks, Open Books For An Open Worldciuciu.denis.2023Încă nu există evaluări
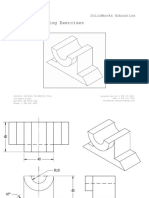
- Detailed Drawing Exercises: Solidworks EducationDocument51 paginiDetailed Drawing Exercises: Solidworks EducationlutherblackÎncă nu există evaluări
- Cctvcad DownloadDocument2 paginiCctvcad Downloadme1111Încă nu există evaluări
- Tender Notice 8 - PEBEIL195 PDFDocument583 paginiTender Notice 8 - PEBEIL195 PDFjosejohn1Încă nu există evaluări
- INTRODUCTION TO COMPUTER AIDED DESIGN RahulDocument6 paginiINTRODUCTION TO COMPUTER AIDED DESIGN RahulRishabhÎncă nu există evaluări
- TOCautodesk Inventor 2023 Course Mastering 3d DesignDocument7 paginiTOCautodesk Inventor 2023 Course Mastering 3d DesignDINESH TIWARIÎncă nu există evaluări
- Manual Mesh ModuleDocument97 paginiManual Mesh ModuleSandra Cañadas NavarroÎncă nu există evaluări
- OJT Report On AutoCADDocument22 paginiOJT Report On AutoCADNitesh YadavÎncă nu există evaluări
- Understanding Virtual Reality Technology: Advances and ApplicationsDocument20 paginiUnderstanding Virtual Reality Technology: Advances and ApplicationsSneha Giji SajiÎncă nu există evaluări