S-ar putea să vă placă și
- Special Matrices and Their Applications in Numerical Mathematics: Second EditionDe la EverandSpecial Matrices and Their Applications in Numerical Mathematics: Second EditionEvaluare: 5 din 5 stele5/5 (1)
- Discriminative Generative: R Follow ADocument18 paginiDiscriminative Generative: R Follow AChrsan Ram100% (1)
- Linear Models: The Least-Squares MethodDocument24 paginiLinear Models: The Least-Squares MethodAnimated EngineerÎncă nu există evaluări
- Fixed and Random Model Linear Gndu2020 PDFDocument18 paginiFixed and Random Model Linear Gndu2020 PDFGulshan SharmaÎncă nu există evaluări
- Generalized Linear ModelsDocument66 paginiGeneralized Linear ModelsASHUTOSH GAURAVÎncă nu există evaluări
- Stata Lecture2Document134 paginiStata Lecture2lukyindonesiaÎncă nu există evaluări
- MIT14 382S17 Lec6Document26 paginiMIT14 382S17 Lec6jarod_kyleÎncă nu există evaluări
- Econometrics PracticalDocument13 paginiEconometrics Practicalakashit21a854Încă nu există evaluări
- Carlo Part 6 - Hierarchical Bayesian Modeling Lecture - Notes - 6Document12 paginiCarlo Part 6 - Hierarchical Bayesian Modeling Lecture - Notes - 6Mark AlexandreÎncă nu există evaluări
- Nussbaum 2020 Pair Wise SL MixedDocument23 paginiNussbaum 2020 Pair Wise SL MixedFNÎncă nu există evaluări
- Information Geometry Mode RegressionDocument33 paginiInformation Geometry Mode RegressionMarkus MeyerÎncă nu există evaluări
- Estimation For Multivariate Linear Mixed ModelsDocument7 paginiEstimation For Multivariate Linear Mixed Modelsilkom12Încă nu există evaluări
- Unit 9 Simple Linear Regression: StructureDocument22 paginiUnit 9 Simple Linear Regression: Structuresita rautelaÎncă nu există evaluări
- Spatial Probit Model in RDocument14 paginiSpatial Probit Model in RMauricio OyarzoÎncă nu există evaluări
- Multiple Imputation of Predictor Variables Using Generalized Additive ModelsDocument27 paginiMultiple Imputation of Predictor Variables Using Generalized Additive ModelseduardoÎncă nu există evaluări
- Regression and CorrelationDocument13 paginiRegression and CorrelationzÎncă nu există evaluări
- Generalized Linear Models: Simon Jackman Stanford UniversityDocument7 paginiGeneralized Linear Models: Simon Jackman Stanford UniversityababacarbaÎncă nu există evaluări
- Nelder 1972Document16 paginiNelder 19720hitk0Încă nu există evaluări
- Unit 4 Multiple Regression Model: 4.0 ObjectivesDocument23 paginiUnit 4 Multiple Regression Model: 4.0 Objectivesritika prakashÎncă nu există evaluări
- Appendix Nonparametric RegressionDocument17 paginiAppendix Nonparametric Regressionamara abdelkarimeÎncă nu există evaluări
- Econometrics II CH 1Document48 paginiEconometrics II CH 1nigusu deguÎncă nu există evaluări
- Hierarchical GLMMMDocument20 paginiHierarchical GLMMMLampros KaimakamisÎncă nu există evaluări
- Linear Regression Analysis: Module - IvDocument10 paginiLinear Regression Analysis: Module - IvupenderÎncă nu există evaluări
- Advice: sciences/business/economics/kit-baum-workshops/Bham13P4slides PDFDocument11 paginiAdvice: sciences/business/economics/kit-baum-workshops/Bham13P4slides PDFAhmad Bello DogarawaÎncă nu există evaluări
- Estimating Parameters of A DirectedDocument10 paginiEstimating Parameters of A DirectedjozsefÎncă nu există evaluări
- Q.1 Explain The Underlying Ideas Behind The Log It Model. Explain On What Grounds Log It Model Is An Improvement Over Linear Probability Model. AnsDocument17 paginiQ.1 Explain The Underlying Ideas Behind The Log It Model. Explain On What Grounds Log It Model Is An Improvement Over Linear Probability Model. AnsBinyamin AlamÎncă nu există evaluări
- McCulloch and Neuhaus 2005 Generalized Linear Mixed ModelsDocument5 paginiMcCulloch and Neuhaus 2005 Generalized Linear Mixed ModelsCarlos AndradeÎncă nu există evaluări
- A Stepwise Approach For High-Dimensional Gaussian Graphical ModelsDocument27 paginiA Stepwise Approach For High-Dimensional Gaussian Graphical ModelsivanmarceÎncă nu există evaluări
- Residuals Least-Squares Method Univariate RegressionDocument17 paginiResiduals Least-Squares Method Univariate RegressionergrehgeÎncă nu există evaluări
- What Is Poisson Regression Models in Generalized Linear ModellingDocument18 paginiWhat Is Poisson Regression Models in Generalized Linear ModellingKasa BekeleÎncă nu există evaluări
- 03 ES Regression CorrelationDocument14 pagini03 ES Regression CorrelationMuhammad AbdullahÎncă nu există evaluări
- Chapter4 Regression ModelAdequacyCheckingDocument38 paginiChapter4 Regression ModelAdequacyCheckingAishat OmotolaÎncă nu există evaluări
- Score Tests For Heterogeneity and Overdispersion in Zero-Inflated Poisson and Binomial Regression ModelsDocument16 paginiScore Tests For Heterogeneity and Overdispersion in Zero-Inflated Poisson and Binomial Regression Modelstamer El-AzabÎncă nu există evaluări
- Generalised Coupled Tensor Factorisation: Taylan - Cemgil, Umut - Simsekli @boun - Edu.trDocument9 paginiGeneralised Coupled Tensor Factorisation: Taylan - Cemgil, Umut - Simsekli @boun - Edu.trxmercanÎncă nu există evaluări
- Statistical Properties of OLSDocument59 paginiStatistical Properties of OLSEvgenIy BokhonÎncă nu există evaluări
- Object-Oriented Computation of Sandwich Estimators: Achim ZeileisDocument16 paginiObject-Oriented Computation of Sandwich Estimators: Achim ZeileisAnwar HidayatÎncă nu există evaluări
- Fitting Linear Mixed-Effects Models Using Lme4: Douglas Bates Martin Mächler Benjamin M. Bolker Steven C. WalkerDocument51 paginiFitting Linear Mixed-Effects Models Using Lme4: Douglas Bates Martin Mächler Benjamin M. Bolker Steven C. WalkerCristobal CamposÎncă nu există evaluări
- Chapter 1. Introduction and Review of Univariate General Linear ModelsDocument25 paginiChapter 1. Introduction and Review of Univariate General Linear Modelsemjay emjayÎncă nu există evaluări
- Constrained OptimizationDocument10 paginiConstrained OptimizationCourtney WilliamsÎncă nu există evaluări
- Codigo Box Cox SASDocument37 paginiCodigo Box Cox SASRodrigo Romo MuñozÎncă nu există evaluări
- Linear Least SquaresDocument10 paginiLinear Least Squareswatson191Încă nu există evaluări
- Variance Component Estimation & Best Linear Unbiased Prediction (Blup)Document16 paginiVariance Component Estimation & Best Linear Unbiased Prediction (Blup)Edjane FreitasÎncă nu există evaluări
- Linear Models: The Least-Squares Method, The Perceptron: A Heuristic Learning Algorithm ForDocument25 paginiLinear Models: The Least-Squares Method, The Perceptron: A Heuristic Learning Algorithm ForChrsan RamÎncă nu există evaluări
- Answers Review Questions EconometricsDocument59 paginiAnswers Review Questions EconometricsZX Lee84% (25)
- Ordered Response ModelsDocument15 paginiOrdered Response ModelsSuvamÎncă nu există evaluări
- 4869 Robust Sparse Principal Component Regression Under The High Dimensional Elliptical ModelDocument9 pagini4869 Robust Sparse Principal Component Regression Under The High Dimensional Elliptical ModelVe LopiÎncă nu există evaluări
- 2-Logistic RegressionDocument17 pagini2-Logistic RegressionSafaa KahilÎncă nu există evaluări
- 2018 ChapterDocument16 pagini2018 Chapterkasye teshomeÎncă nu există evaluări
- Bayesian Modelling For Data Analysis and Learning From DataDocument19 paginiBayesian Modelling For Data Analysis and Learning From DataJoan AlbiolÎncă nu există evaluări
- Classical LinearReg 000Document41 paginiClassical LinearReg 000Umair AyazÎncă nu există evaluări
- Final 2015 PDFDocument13 paginiFinal 2015 PDFAchilles 777Încă nu există evaluări
- Fossacs 05Document15 paginiFossacs 05api-3778787Încă nu există evaluări
- Estimation For Multivariate Linear Mixed ModelsDocument6 paginiEstimation For Multivariate Linear Mixed ModelsFir DausÎncă nu există evaluări
- Continuous L1 Norm Estimation of Lorenz CurveDocument9 paginiContinuous L1 Norm Estimation of Lorenz CurveBangladesh Journal of Multidisciplinary ScientificÎncă nu există evaluări
- Stuart 81Document25 paginiStuart 81Sebastian CulquiÎncă nu există evaluări
- Statistical ModelDocument9 paginiStatistical ModelRae SecretariaÎncă nu există evaluări
- Papke Wooldridge 1996Document15 paginiPapke Wooldridge 1996fictitious758Încă nu există evaluări
- Wald Tests When Restrictions Are Locally SingularDocument48 paginiWald Tests When Restrictions Are Locally SingularMasudul ICÎncă nu există evaluări
- Tutorial On PLS and PCADocument17 paginiTutorial On PLS and PCAElsa George100% (1)
- Summary Machine LearningDocument15 paginiSummary Machine LearningtjÎncă nu există evaluări
- Obsolete Formulas For Two-Phase Variances: Thomas Lumley November 20, 2013Document2 paginiObsolete Formulas For Two-Phase Variances: Thomas Lumley November 20, 2013rojasleopÎncă nu există evaluări
- Introduction To The Data - Table Package in R: Revised: September 18, 2015 (A Later Revision May Be Available On The)Document8 paginiIntroduction To The Data - Table Package in R: Revised: September 18, 2015 (A Later Revision May Be Available On The)rojasleopÎncă nu există evaluări
- RCPP: Unit Testing Results: Test ExecutionDocument1 paginăRCPP: Unit Testing Results: Test ExecutionrojasleopÎncă nu există evaluări
- Svminternals PDFDocument3 paginiSvminternals PDFrojasleopÎncă nu există evaluări
- To HTML and R2HTML PackageDocument4 paginiTo HTML and R2HTML PackagerojasleopÎncă nu există evaluări
- Map Overlay and Spatial Aggregation in SP: Edzer Pebesma April 14, 2016Document19 paginiMap Overlay and Spatial Aggregation in SP: Edzer Pebesma April 14, 2016rojasleopÎncă nu există evaluări
- Survey Examples From UCLA ATS: 1 Stratified SamplingDocument11 paginiSurvey Examples From UCLA ATS: 1 Stratified SamplingrojasleopÎncă nu există evaluări
- Design Issues in Matrix Package Development: 1 The Matrix Class StructuresDocument5 paginiDesign Issues in Matrix Package Development: 1 The Matrix Class StructuresrojasleopÎncă nu există evaluări
- MIT16 660JIAP12 WeigelDocument2 paginiMIT16 660JIAP12 WeigelrojasleopÎncă nu există evaluări
- R LangDocument60 paginiR LangrojasleopÎncă nu există evaluări
- Hands-On Data Science With R Text Mining: 10th January 2016Document47 paginiHands-On Data Science With R Text Mining: 10th January 2016rojasleopÎncă nu există evaluări
- Examples of Two-Stage Surveys: Thomas Lumley March 24, 2005Document5 paginiExamples of Two-Stage Surveys: Thomas Lumley March 24, 2005rojasleopÎncă nu există evaluări
- RQ Mcycle1Document1 paginăRQ Mcycle1rojasleopÎncă nu există evaluări
- RQ EngellogplotDocument1 paginăRQ EngellogplotrojasleopÎncă nu există evaluări
- RQ RegsplineDocument1 paginăRQ RegsplinerojasleopÎncă nu există evaluări
- Asking The Right Questions For IT Governance: by Erik Guldentops, CISADocument3 paginiAsking The Right Questions For IT Governance: by Erik Guldentops, CISArojasleopÎncă nu există evaluări
- An Example of "Linking" Graphical Objects in Grid: Paul Murrell December 10, 2015Document2 paginiAn Example of "Linking" Graphical Objects in Grid: Paul Murrell December 10, 2015rojasleopÎncă nu există evaluări
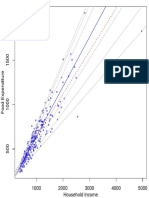
- 1000 2000 3000 4000 5000 Household IncomeDocument1 pagină1000 2000 3000 4000 5000 Household IncomerojasleopÎncă nu există evaluări
- Docslide - Us Lean Six Sigma Green Belt Control Test Exam 15 QaDocument4 paginiDocslide - Us Lean Six Sigma Green Belt Control Test Exam 15 QarojasleopÎncă nu există evaluări
- F1 Larson Wood v3Document49 paginiF1 Larson Wood v3rojasleopÎncă nu există evaluări
- Brief 3-A Policy Content EvaluationDocument4 paginiBrief 3-A Policy Content Evaluationrommel irabagonÎncă nu există evaluări
- Pavement Design Thickness Using Asstho Method 1993Document7 paginiPavement Design Thickness Using Asstho Method 1993Anonymous tBhJoH5wgMÎncă nu există evaluări
- Datastructures in C++Document5 paginiDatastructures in C++Vinoth ChandrasekaranÎncă nu există evaluări
- Topographic Map of MacdonaDocument1 paginăTopographic Map of MacdonaHistoricalMapsÎncă nu există evaluări
- Gumbel DistributionDocument6 paginiGumbel DistributionMisty BellÎncă nu există evaluări
- What Is A PHD Research ProposalDocument2 paginiWhat Is A PHD Research ProposalBasanta BhowmikÎncă nu există evaluări
- Module 3 Chapter 3.Document14 paginiModule 3 Chapter 3.Patty BoneoÎncă nu există evaluări
- CMMI Registered Interpreter Mock Interview Process GuidanceDocument2 paginiCMMI Registered Interpreter Mock Interview Process GuidanceLaraisonÎncă nu există evaluări
- Direct Observation and Key Informant Interview Techniques For Primary Da...Document19 paginiDirect Observation and Key Informant Interview Techniques For Primary Da...Ibrahim AgilaÎncă nu există evaluări
- Needs Assessment Why Needs Assessment?Document8 paginiNeeds Assessment Why Needs Assessment?Bhavana NimÎncă nu există evaluări
- Form 1 Deadlines OverviewDocument1 paginăForm 1 Deadlines OverviewOmar MorocciÎncă nu există evaluări
- What Is The Difference Between A Literature Review and A ReportDocument5 paginiWhat Is The Difference Between A Literature Review and A Reportc5q8g5tzÎncă nu există evaluări
- Gaining and Sustaining Competitive Advantage A Study of Nigeria's Manufacturing SectorDocument11 paginiGaining and Sustaining Competitive Advantage A Study of Nigeria's Manufacturing SectorfondhaÎncă nu există evaluări
- Education Reforms in IsraelDocument27 paginiEducation Reforms in IsraelLuan NguyenÎncă nu există evaluări
- Competency Based RecruitmentDocument14 paginiCompetency Based RecruitmentharshadaÎncă nu există evaluări
- HHS Public Access: Characteristics of Qualitative Descriptive Studies: A Systematic ReviewDocument24 paginiHHS Public Access: Characteristics of Qualitative Descriptive Studies: A Systematic ReviewDhiina ADrianaÎncă nu există evaluări
- Chapter 5Document28 paginiChapter 5Alper MertÎncă nu există evaluări
- Ogilvy's 360 Digital Influence's Conversation Impact Model For Social Media MeasurementDocument8 paginiOgilvy's 360 Digital Influence's Conversation Impact Model For Social Media MeasurementirfankamalÎncă nu există evaluări
- This Study Resource WasDocument4 paginiThis Study Resource WasEden Dela CruzÎncă nu există evaluări
- Practical Research 1 Quarter 1 - Module 1: FusingDocument8 paginiPractical Research 1 Quarter 1 - Module 1: FusingJazer Leuterio100% (1)
- Experiments MontgomeryDocument111 paginiExperiments MontgomeryJaka Permana SoebagjoÎncă nu există evaluări
- Chapter 1 QuizDocument3 paginiChapter 1 QuizbuilugawÎncă nu există evaluări
- Model LinearDocument33 paginiModel LinearIvan AliagaÎncă nu există evaluări
- Evaluation of Training and DevelopmentDocument59 paginiEvaluation of Training and Developmentaiswarya888888Încă nu există evaluări
- Saunders Research OnionDocument15 paginiSaunders Research OnionFlorence Katonje100% (1)
- Focus GroupsDocument6 paginiFocus GroupsAbhijit singhÎncă nu există evaluări
- Radial SurveyingDocument10 paginiRadial Surveyingالالم الخرافيÎncă nu există evaluări
- 12 Writing A Position PaperDocument4 pagini12 Writing A Position PaperJan Fery TuppalÎncă nu există evaluări
- ESCP EuropeDocument2 paginiESCP EuropeTien NguyenÎncă nu există evaluări
- World Happiness ReportDocument170 paginiWorld Happiness ReportmrdanÎncă nu există evaluări