S-ar putea să vă placă și
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- Theories of International TradeDocument33 paginiTheories of International Tradefrediz79Încă nu există evaluări
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- CHAPTER ONE Structural GeologyDocument46 paginiCHAPTER ONE Structural GeologyAfolabi Eniola AbiolaÎncă nu există evaluări
- Hydrology Principles Analysis DesignDocument477 paginiHydrology Principles Analysis DesignCarel De Jager82% (17)
- Hydrology Principles Analysis DesignDocument477 paginiHydrology Principles Analysis DesignCarel De Jager82% (17)
- Why CPVC Pipes FailDocument12 paginiWhy CPVC Pipes FailNikita Kadam100% (1)
- Outsourced New Product DevelopmentDocument5 paginiOutsourced New Product Developmentvinnakota5Încă nu există evaluări
- Internship PresentationDocument22 paginiInternship PresentationCalvin WongÎncă nu există evaluări
- 2 Lec 2Document25 pagini2 Lec 2jahanzaibchÎncă nu există evaluări
- Vernier MicrometerDocument3 paginiVernier MicrometerBaltazar MarcosÎncă nu există evaluări
- Thermal Performance of ResinDocument14 paginiThermal Performance of ResinjahanzaibchÎncă nu există evaluări
- 034 PDFDocument10 pagini034 PDFjahanzaibchÎncă nu există evaluări
- Graduate Awards Chart: Citizenship Apply To DegreeDocument1 paginăGraduate Awards Chart: Citizenship Apply To DegreejahanzaibchÎncă nu există evaluări
- Graduate Awards Chart: Citizenship Apply To DegreeDocument1 paginăGraduate Awards Chart: Citizenship Apply To DegreejahanzaibchÎncă nu există evaluări
- ENV ENG - " Design of Sewer System "Document10 paginiENV ENG - " Design of Sewer System "anon_702179917Încă nu există evaluări
- Freeze Thaw Analysis Climate FactorsDocument8 paginiFreeze Thaw Analysis Climate FactorsjahanzaibchÎncă nu există evaluări
- Equation Editor The Word 2007/2010 Equation Editor Shortcut CommandsDocument11 paginiEquation Editor The Word 2007/2010 Equation Editor Shortcut CommandspanchopanzaÎncă nu există evaluări
- Analytical Modelling of Bond Between FRP Reinforcing Bars and ConcreteDocument5 paginiAnalytical Modelling of Bond Between FRP Reinforcing Bars and ConcretejahanzaibchÎncă nu există evaluări
- Equation Editor The Word 2007/2010 Equation Editor Shortcut CommandsDocument11 paginiEquation Editor The Word 2007/2010 Equation Editor Shortcut CommandspanchopanzaÎncă nu există evaluări
- Structural Dynamics Lecture 2Document19 paginiStructural Dynamics Lecture 2jahanzaibchÎncă nu există evaluări
- Structural Dynamics Lecture 3Document16 paginiStructural Dynamics Lecture 3jahanzaibchÎncă nu există evaluări
- Lecture 5-Calculation of Invert Levels: Engr. Gul-E-HinaDocument15 paginiLecture 5-Calculation of Invert Levels: Engr. Gul-E-HinajahanzaibchÎncă nu există evaluări
- Zener DiodeDocument6 paginiZener DiodeAkram Al-muharamiÎncă nu există evaluări
- Lec 7-Week 4 - (Design of Pumping Station)Document17 paginiLec 7-Week 4 - (Design of Pumping Station)jahanzaibchÎncă nu există evaluări
- Lec 1-Week 1 - (Wastewater Collection System)Document32 paginiLec 1-Week 1 - (Wastewater Collection System)jahanzaibchÎncă nu există evaluări
- Lec 1 and Lec 2Document110 paginiLec 1 and Lec 2jahanzaibchÎncă nu există evaluări
- Lec 4-Week 2 - (Design of Storm Sewer)Document18 paginiLec 4-Week 2 - (Design of Storm Sewer)jahanzaibchÎncă nu există evaluări
- Sample Resume FinalDocument2 paginiSample Resume FinalSyed Asad HussainÎncă nu există evaluări
- SAM3-P256 Development Board Users Manual: This Datasheet Has Been Downloaded From at ThisDocument21 paginiSAM3-P256 Development Board Users Manual: This Datasheet Has Been Downloaded From at ThissunnguyenÎncă nu există evaluări
- Batch 2 SEC Online Test AnswersDocument5 paginiBatch 2 SEC Online Test AnswersBhairav YouthsÎncă nu există evaluări
- MITSUBISHI I-MievDocument297 paginiMITSUBISHI I-Mievtavaelromo84Încă nu există evaluări
- Maneesh Misra CV - 1Document3 paginiManeesh Misra CV - 1Rohit KarhadeÎncă nu există evaluări
- Ang AlibangbangDocument29 paginiAng AlibangbangadhrianneÎncă nu există evaluări
- Engineering & Machinery Corp vs. CADocument8 paginiEngineering & Machinery Corp vs. CALaila Ismael SalisaÎncă nu există evaluări
- Account Statement 060922 051222Document51 paginiAccount Statement 060922 051222allison squad xXÎncă nu există evaluări
- ITEC 11 Lesson 1.1Document35 paginiITEC 11 Lesson 1.1ivyquintelaÎncă nu există evaluări
- Digit Sep 09Document107 paginiDigit Sep 09dukerexÎncă nu există evaluări
- Photoshop TheoryDocument10 paginiPhotoshop TheoryShri BhagwanÎncă nu există evaluări
- Law EssayDocument7 paginiLaw EssayNahula AliÎncă nu există evaluări
- 3-Module 3-23-Feb-2021Material I 23-Feb-2021 Error Detection and CorrectionDocument39 pagini3-Module 3-23-Feb-2021Material I 23-Feb-2021 Error Detection and CorrectionPIYUSH RAJ GUPTA 19BCE2087Încă nu există evaluări
- DO 31 s2020Document18 paginiDO 31 s2020charles barkleyÎncă nu există evaluări
- Queen Elizabeth Olympic Park, Stratford City and Adjacent AreasDocument48 paginiQueen Elizabeth Olympic Park, Stratford City and Adjacent AreasRavi WoodsÎncă nu există evaluări
- VMware SD WAN Google Cloud Platform Virtual Edge Deployment GuideDocument24 paginiVMware SD WAN Google Cloud Platform Virtual Edge Deployment GuideJuan RojasÎncă nu există evaluări
- Module 7 - Materials Management Configuration For Goods Receipts Reach - Ucf.eduDocument12 paginiModule 7 - Materials Management Configuration For Goods Receipts Reach - Ucf.eduAjitabh SinghÎncă nu există evaluări
- Q1 LAS 4 FABM2 12 Week 2 3Document7 paginiQ1 LAS 4 FABM2 12 Week 2 3Flare ColterizoÎncă nu există evaluări
- Yashu Internship Report 21Document45 paginiYashu Internship Report 21Lakshmi dayanand DayaÎncă nu există evaluări
- 358 IG Fashion Pack PDFDocument4 pagini358 IG Fashion Pack PDFbovsichÎncă nu există evaluări
- 147380-1 Motoman XRC Controller Fieldbus (XFB01) Instruction ManualDocument102 pagini147380-1 Motoman XRC Controller Fieldbus (XFB01) Instruction Manualrubi monÎncă nu există evaluări
- R R O S A: Model Rf-It Model Ce-It Insulator TestersDocument2 paginiR R O S A: Model Rf-It Model Ce-It Insulator Testersvictor raul sandoval martinezÎncă nu există evaluări
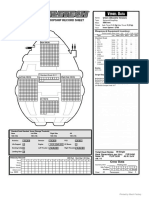
- Union Class Dropship 3025Document1 paginăUnion Class Dropship 3025A KÎncă nu există evaluări
- Shalina Healthcare JD - Business AnalyticsDocument2 paginiShalina Healthcare JD - Business AnalyticsMeow bunÎncă nu există evaluări
- 93 .SG, CBR, MDD, PI, SP - GRDocument11 pagini93 .SG, CBR, MDD, PI, SP - GRChandra Prakash KarkiÎncă nu există evaluări