S-ar putea să vă placă și
- Automotive Electronic Diagnostics (Course 2)De la EverandAutomotive Electronic Diagnostics (Course 2)Evaluare: 4 din 5 stele4/5 (2)
- Control of DC Motor Using Different Control StrategiesDe la EverandControl of DC Motor Using Different Control StrategiesÎncă nu există evaluări
- Electric Motors Reference GuideDocument166 paginiElectric Motors Reference GuideYashveer100% (2)
- Flow Chart - QCDocument2 paginiFlow Chart - QCKarthikeyan Shanmugavel100% (1)
- Electric Motors Reference GuideDocument166 paginiElectric Motors Reference GuideHemendra Jani100% (1)
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisDe la EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisEvaluare: 4 din 5 stele4/5 (2)
- Electric Motor Control: DC, AC, and BLDC MotorsDe la EverandElectric Motor Control: DC, AC, and BLDC MotorsEvaluare: 4.5 din 5 stele4.5/5 (19)
- Speed Control of DC Motor Using Pid Controller BasedDocument16 paginiSpeed Control of DC Motor Using Pid Controller Basedayesha amjadÎncă nu există evaluări
- Excel FFTDocument5 paginiExcel FFTKunal MasaniaÎncă nu există evaluări
- Electric Vehicle Ddesign & Development ProcessDocument6 paginiElectric Vehicle Ddesign & Development Processparth sarthyÎncă nu există evaluări
- Chapter 1: What Is A Drive? 1Document14 paginiChapter 1: What Is A Drive? 1arvokmaÎncă nu există evaluări
- JRC JFE-680 Instruct ManualDocument86 paginiJRC JFE-680 Instruct ManualMark Dominic FedericoÎncă nu există evaluări
- Design of Electronic Semi - Automatic Clutch For Manual Actuation of Clutch in A CarDocument6 paginiDesign of Electronic Semi - Automatic Clutch For Manual Actuation of Clutch in A CarTamilarasanRpcg100% (2)
- Mech - DrivesDocument89 paginiMech - DrivesankurÎncă nu există evaluări
- From Input To Affordance: Social-Interactive Learning From An Ecological Perspective Leo Van Lier Monterey Institute Oflntemational StudiesDocument15 paginiFrom Input To Affordance: Social-Interactive Learning From An Ecological Perspective Leo Van Lier Monterey Institute Oflntemational StudiesKayra MoslemÎncă nu există evaluări
- 04493430Document7 pagini04493430Krishna KarthikÎncă nu există evaluări
- AC Drives Control ABBDocument316 paginiAC Drives Control ABBbryan_robinsonuscÎncă nu există evaluări
- Implicit Explicit SignalsDocument8 paginiImplicit Explicit SignalsVersoza Nel100% (2)
- Honeycomb Kevlar 49 (Hexcel)Document3 paginiHoneycomb Kevlar 49 (Hexcel)Julia GarciaÎncă nu există evaluări
- Electromechanical SteeringDocument34 paginiElectromechanical Steeringzaka_czÎncă nu există evaluări
- AC Electric Motors Control: Advanced Design Techniques and ApplicationsDe la EverandAC Electric Motors Control: Advanced Design Techniques and ApplicationsFouad GiriÎncă nu există evaluări
- JC Series Jaw Crusher PDFDocument8 paginiJC Series Jaw Crusher PDFgarrybieber100% (1)
- Introduction to Hybrid Vehicle System Modeling and ControlDe la EverandIntroduction to Hybrid Vehicle System Modeling and ControlEvaluare: 4 din 5 stele4/5 (1)
- Technical Guidebook 1 10 en RevfDocument446 paginiTechnical Guidebook 1 10 en RevfTfelx CflexÎncă nu există evaluări
- 5G Transport Slice Control in End-To-End 5G NetworksDocument19 pagini5G Transport Slice Control in End-To-End 5G NetworksmorganÎncă nu există evaluări
- An Electric Braking System Controller For Brushless DC Motor in Electric Vehicle ApplicationDocument9 paginiAn Electric Braking System Controller For Brushless DC Motor in Electric Vehicle ApplicationEzequiel AriasÎncă nu există evaluări
- Electrical - Ijeee-Electronic Steerin of Automobiles SaranyaDocument8 paginiElectrical - Ijeee-Electronic Steerin of Automobiles Saranyaiaset123Încă nu există evaluări
- PR2Document10 paginiPR2syakir yusriÎncă nu există evaluări
- Automatic Gear Shifting Mechanism in Two WheelersDocument5 paginiAutomatic Gear Shifting Mechanism in Two WheelersIJRASETPublicationsÎncă nu există evaluări
- Motor Selection GuideDocument56 paginiMotor Selection GuideAshokÎncă nu există evaluări
- Bike-Powered Electricity GeneratorDocument10 paginiBike-Powered Electricity GeneratorAsia Pacific Journal of Multidisciplinary ResearchÎncă nu există evaluări
- Speed Control of A Conveyor BeltDocument24 paginiSpeed Control of A Conveyor BeltSumu Talal50% (2)
- Mee 512Document31 paginiMee 512Gabriel UdokangÎncă nu există evaluări
- Motor Selection Guide: Made For Students, by StudentsDocument57 paginiMotor Selection Guide: Made For Students, by StudentsAkizuki TakaoÎncă nu există evaluări
- Conceptual Design of An Electric BikeDocument22 paginiConceptual Design of An Electric BikemehmetÎncă nu există evaluări
- Aman Powertrainev ElectricalDocument12 paginiAman Powertrainev Electricalsebecay203Încă nu există evaluări
- Chapter 1: What Is A Drive? 1Document14 paginiChapter 1: What Is A Drive? 1Eswar Muralidhar JonnalagaddaÎncă nu există evaluări
- IRJET Research On Clutchless Quick GearDocument3 paginiIRJET Research On Clutchless Quick Gearscdindar3838Încă nu există evaluări
- Induction Motor Speed Control Using Fuzzy Logic Controller: AbstractDocument15 paginiInduction Motor Speed Control Using Fuzzy Logic Controller: AbstractAvinash VenkatÎncă nu există evaluări
- Introduction To The AutomobileDocument9 paginiIntroduction To The AutomobileShivamDivyamÎncă nu există evaluări
- Assignment On Servo Motor: January 2018Document4 paginiAssignment On Servo Motor: January 2018Simagn BekeleÎncă nu există evaluări
- Design of Automatic Speed Control System in 4 - Wheelers For Avoiding AccidentsDocument4 paginiDesign of Automatic Speed Control System in 4 - Wheelers For Avoiding AccidentsChandra SekarÎncă nu există evaluări
- Speed Control of A 2HP DC MotorDocument25 paginiSpeed Control of A 2HP DC MotorEdul BrianÎncă nu există evaluări
- Stepper MotorDocument9 paginiStepper Motorabdoo773719637Încă nu există evaluări
- Power Compensation Methodology For Electric VehiclesDocument7 paginiPower Compensation Methodology For Electric Vehicleschevy94Încă nu există evaluări
- Automatic Gear Shifting Mechanism in Two Wheelers: April 2017Document6 paginiAutomatic Gear Shifting Mechanism in Two Wheelers: April 2017alakappan somasundaramÎncă nu există evaluări
- C 2012 Naren VelezDocument19 paginiC 2012 Naren Veleznayak_bibekumarÎncă nu există evaluări
- Int Eng Prospects MAN BWDocument19 paginiInt Eng Prospects MAN BWWsm HNÎncă nu există evaluări
- EV Motors & DriversDocument10 paginiEV Motors & DriversSasindu GayanthaÎncă nu există evaluări
- User 'S Guide For MT-DAE: Learning Model: Electric Power SteeringDocument45 paginiUser 'S Guide For MT-DAE: Learning Model: Electric Power SteeringShifat UllahÎncă nu există evaluări
- IRMCS3041 System Overview & Guide - RD - Irmcs3041Document14 paginiIRMCS3041 System Overview & Guide - RD - Irmcs3041shivguptaÎncă nu există evaluări
- Hillassist JournalDocument6 paginiHillassist JournalPSYCHO CREATIONSÎncă nu există evaluări
- Performance Analysis of Voice Operated Wheel ChairDocument5 paginiPerformance Analysis of Voice Operated Wheel ChairInternational Journal of Research in Engineering and TechnologyÎncă nu există evaluări
- Bala Subramanian 2015Document8 paginiBala Subramanian 2015yourspajjuÎncă nu există evaluări
- Jurnaallllll Inggris RevisiDocument8 paginiJurnaallllll Inggris RevisiYahya Nyanyuk EndahÎncă nu există evaluări
- 920-Article Text-6483-1-10-20230926Document7 pagini920-Article Text-6483-1-10-20230926kamutegar1Încă nu există evaluări
- Characteristics of Electric Drives: Subject Name: Electric Drives Class: 4 Year/ VII SemesterDocument35 paginiCharacteristics of Electric Drives: Subject Name: Electric Drives Class: 4 Year/ VII SemesterBabbu DograÎncă nu există evaluări
- Indication of Brake Failure by Using IR SensorDocument3 paginiIndication of Brake Failure by Using IR SensormahendranÎncă nu există evaluări
- Elct302group1 TechmanualDocument35 paginiElct302group1 Techmanualapi-384660200Încă nu există evaluări
- Design and Fabrication of Self Balancing Bike Using Gyroscopic EffectDocument6 paginiDesign and Fabrication of Self Balancing Bike Using Gyroscopic EffectRoshan BahadurÎncă nu există evaluări
- Automatic Side Stand SynopsisDocument5 paginiAutomatic Side Stand SynopsisRaja ManeÎncă nu există evaluări
- Tm400 The Basics of Motion ControlDocument53 paginiTm400 The Basics of Motion ControlEdward ArmijoÎncă nu există evaluări
- Model Predictive Control of High Power Converters and Industrial DrivesDe la EverandModel Predictive Control of High Power Converters and Industrial DrivesÎncă nu există evaluări
- Robot. Automat., 1996.: Sliding Mode Control For Trajectory Tracking of Nonholonomic Wheeled Mobile RobotsDocument10 paginiRobot. Automat., 1996.: Sliding Mode Control For Trajectory Tracking of Nonholonomic Wheeled Mobile RobotsSubash Gerrard DhakalÎncă nu există evaluări
- SPH BasicsDocument27 paginiSPH BasicsSubash Gerrard DhakalÎncă nu există evaluări
- Mechanical Engineering Syllabus 2013Document94 paginiMechanical Engineering Syllabus 2013Subash Gerrard DhakalÎncă nu există evaluări
- Economics Analysis of A Jacket Factory in NepalDocument38 paginiEconomics Analysis of A Jacket Factory in NepalSubash Gerrard DhakalÎncă nu există evaluări
- MAC EssaysDocument2 paginiMAC EssaysSubash Gerrard DhakalÎncă nu există evaluări
- Bending DeflectionDocument3 paginiBending DeflectionmghgolÎncă nu există evaluări
- Imp DocumentDocument1 paginăImp DocumentSubash Gerrard DhakalÎncă nu există evaluări
- Cobalamin in Companion AnimalsDocument8 paginiCobalamin in Companion AnimalsFlávia UchôaÎncă nu există evaluări
- Cathodic Protection Catalog - New 8Document1 paginăCathodic Protection Catalog - New 8dhineshÎncă nu există evaluări
- Fully Automatic Coffee Machine - Slimissimo - IB - SCOTT UK - 2019Document20 paginiFully Automatic Coffee Machine - Slimissimo - IB - SCOTT UK - 2019lazareviciÎncă nu există evaluări
- Improve On-Time DeliveriesDocument24 paginiImprove On-Time DeliveriesUdayÎncă nu există evaluări
- Lecture Planner - Inorganic Chemistry (Legend) - Yakeen NEET 2.0 2024Document1 paginăLecture Planner - Inorganic Chemistry (Legend) - Yakeen NEET 2.0 2024Dipendra KumarÎncă nu există evaluări
- SP Essay 1Document14 paginiSP Essay 1api-511870420Încă nu există evaluări
- Tugas 2-TRK Lanjut Kelompok 3 Andre-Arief-IstiaDocument18 paginiTugas 2-TRK Lanjut Kelompok 3 Andre-Arief-IstiaAndre Fahriz Perdana HarahapÎncă nu există evaluări
- Gemh 108Document20 paginiGemh 108YuvrajÎncă nu există evaluări
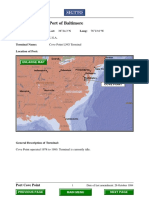
- Port Name: Port of BaltimoreDocument17 paginiPort Name: Port of Baltimoremohd1khairul1anuarÎncă nu există evaluări
- Tree Growth CharacteristicsDocument9 paginiTree Growth CharacteristicsMunganÎncă nu există evaluări
- Ad149 Manual RDocument69 paginiAd149 Manual RCharityÎncă nu există evaluări
- Faa Registry: N-Number Inquiry ResultsDocument3 paginiFaa Registry: N-Number Inquiry Resultsolga duqueÎncă nu există evaluări
- Technical Information: Range-Free Controller FA-M3 System Upgrade GuideDocument33 paginiTechnical Information: Range-Free Controller FA-M3 System Upgrade GuideAddaÎncă nu există evaluări
- DOC-20161226-WA0009 DiagramaDocument61 paginiDOC-20161226-WA0009 DiagramaPedroÎncă nu există evaluări
- Surface TensionDocument13 paginiSurface TensionElizebeth GÎncă nu există evaluări
- Worksheet Series 5: Answer Any 3 Questions From 1 To 6. (2 Score Each)Document6 paginiWorksheet Series 5: Answer Any 3 Questions From 1 To 6. (2 Score Each)AswithÎncă nu există evaluări
- SambongDocument3 paginiSambongNica Del GallegoÎncă nu există evaluări
- Toshiba: ® A20SeriesDocument12 paginiToshiba: ® A20SeriesYangÎncă nu există evaluări
- World's Standard Model G6A!: Low Signal RelayDocument9 paginiWorld's Standard Model G6A!: Low Signal RelayEgiÎncă nu există evaluări
- Process Costing Exercises Series 1Document23 paginiProcess Costing Exercises Series 1sarahbeeÎncă nu există evaluări
- Midterm Exam Gor Grade 11Document2 paginiMidterm Exam Gor Grade 11Algelle AbrantesÎncă nu există evaluări
- Percent by VolumeDocument19 paginiPercent by VolumeSabrina LavegaÎncă nu există evaluări
- Parts Catalogue of Foton: (TC2A504-034K)Document132 paginiParts Catalogue of Foton: (TC2A504-034K)МаксимÎncă nu există evaluări