S-ar putea să vă placă și
- Introduction To Robotics (CS223A) Homework #3 Solution (Winter 2007/2008)Document5 paginiIntroduction To Robotics (CS223A) Homework #3 Solution (Winter 2007/2008)علي كامل الاسديÎncă nu există evaluări
- Ihw 3 1912838Document3 paginiIhw 3 1912838Đỗ DanhÎncă nu există evaluări
- Problem 1:: EEL6667: Homework #2 SolutionsDocument7 paginiProblem 1:: EEL6667: Homework #2 SolutionsHYTHAMÎncă nu există evaluări
- ∂ k ∂ ˙q m l I I m d θ m d ∂ k ∂ q m d θ ∂ v ∂ q g m l m d gmDocument3 pagini∂ k ∂ ˙q m l I I m d θ m d ∂ k ∂ q m d θ ∂ v ∂ q g m l m d gmDanielÎncă nu există evaluări
- Linear Algebra & System Response 2Document4 paginiLinear Algebra & System Response 2Rehman SaleemÎncă nu există evaluări
- Theo đề bài, ta có: PA=LU: A= R 2=R 2−2 R 1 R3=R3.R1 R3=R3.R2 UDocument9 pagini Theo đề bài, ta có: PA=LU: A= R 2=R 2−2 R 1 R3=R3.R1 R3=R3.R2 UNhân LêÎncă nu există evaluări
- Lecture Note Chap 3 DEDocument33 paginiLecture Note Chap 3 DEIzzat AiresÎncă nu există evaluări
- Solution To The Tutorial Sheet 4: November 12, 2019: SandeepDocument5 paginiSolution To The Tutorial Sheet 4: November 12, 2019: SandeepAyush SinghÎncă nu există evaluări
- Griffiths ED4 e CH 1 P 34Document2 paginiGriffiths ED4 e CH 1 P 34Neha AzizÎncă nu există evaluări
- Relativistic QMDocument21 paginiRelativistic QMI m mortal Beast ytÎncă nu există evaluări
- Assignment 4Document3 paginiAssignment 4Kriti GargÎncă nu există evaluări
- Theo đề bài, ta có: PA=LU: A= R 2↔ R3 R 3=R 3−2 R 1 UDocument3 pagini Theo đề bài, ta có: PA=LU: A= R 2↔ R3 R 3=R 3−2 R 1 UNhân LêÎncă nu există evaluări
- Problem Statement: Advanced Structural Mechanics M Nicholas FantuzziDocument4 paginiProblem Statement: Advanced Structural Mechanics M Nicholas FantuzziMahdi LotfipourÎncă nu există evaluări
- Problem Statement: Advanced Structural Mechanics M Nicholas FantuzziDocument4 paginiProblem Statement: Advanced Structural Mechanics M Nicholas FantuzziMahdi LotfipourÎncă nu există evaluări
- Problem Statement: Advanced Structural Mechanics M Nicholas FantuzziDocument4 paginiProblem Statement: Advanced Structural Mechanics M Nicholas FantuzziMahdi LotfipourÎncă nu există evaluări
- Problem Statement: Advanced Structural Mechanics M Nicholas FantuzziDocument4 paginiProblem Statement: Advanced Structural Mechanics M Nicholas FantuzziMahdi LotfipourÎncă nu există evaluări
- Robotics1 Test2 09.12.17Document6 paginiRobotics1 Test2 09.12.17asalifew belachewÎncă nu există evaluări
- Quiz 1Document3 paginiQuiz 1LaurentiusDamasSulistyaÎncă nu există evaluări
- "Grillage Analogy in Bridge Deck Analysis" by C.S.Surana and R.AggrawalDocument3 pagini"Grillage Analogy in Bridge Deck Analysis" by C.S.Surana and R.AggrawalChiranjaya HulangamuwaÎncă nu există evaluări
- Griffiths ED4 e CH 2 P 3Document3 paginiGriffiths ED4 e CH 2 P 3Neha AzizÎncă nu există evaluări
- hw10 Calc Var-AnsvvvvvvvvvvvvvvDocument7 paginihw10 Calc Var-AnsvvvvvvvvvvvvvvNiamh TenebrarionÎncă nu există evaluări
- Finite Elements For Beam Structures: Computational MechanicsDocument29 paginiFinite Elements For Beam Structures: Computational MechanicsHalef Michel Bou KarimÎncă nu există evaluări
- Angular Momentum in Spherical CoordinatesDocument11 paginiAngular Momentum in Spherical CoordinatesAna Helena VieiraÎncă nu există evaluări
- DN 1Document2 paginiDN 1Gal Kranjc KušlanÎncă nu există evaluări
- Quiz 2 BsolnDocument3 paginiQuiz 2 BsolnHussein LyÎncă nu există evaluări
- 2019 AMAM Exam PaperDocument3 pagini2019 AMAM Exam PaperzeliawillscumbergÎncă nu există evaluări
- MAT 302 Chap 05Document15 paginiMAT 302 Chap 05kamaldeen176Încă nu există evaluări
- Assignment 5Document5 paginiAssignment 5miller.austin0529Încă nu există evaluări
- Assignment 6 Solutions 13Document16 paginiAssignment 6 Solutions 13Arfaz HussainÎncă nu există evaluări
- Quiz 5Document1 paginăQuiz 5IndrajÎncă nu există evaluări
- Linear Systems: Reduced Row Echelon FormDocument4 paginiLinear Systems: Reduced Row Echelon FormAli SherÎncă nu există evaluări
- Goldstein Solution Ch-7Document10 paginiGoldstein Solution Ch-7shaukatkhattak67% (3)
- 2020aequhw06 PDFDocument4 pagini2020aequhw06 PDFDaniela CumbalazaÎncă nu există evaluări
- Ch06 - Formulation of Bar and Beam ElementsDocument29 paginiCh06 - Formulation of Bar and Beam ElementsJeff ImamÎncă nu există evaluări
- 1 The Lorentz TransformationDocument9 pagini1 The Lorentz TransformationRayShefhÎncă nu există evaluări
- Inverse Laplace TransformDocument3 paginiInverse Laplace TransformastnerÎncă nu există evaluări
- Mathematics: Extending The Applicability of Stirling's MethodDocument10 paginiMathematics: Extending The Applicability of Stirling's MethodAlberto Magreñán RuizÎncă nu există evaluări
- Midterm13 TakehomeDocument2 paginiMidterm13 TakehomeSutirtha SenguptaÎncă nu există evaluări
- Beta Gamma For AkDocument5 paginiBeta Gamma For AkHussam AgabÎncă nu există evaluări
- MATH2352 Differential Equations and Applications Tutorial Notes 5Document4 paginiMATH2352 Differential Equations and Applications Tutorial Notes 5John ChanÎncă nu există evaluări
- Chapter 3Document20 paginiChapter 3chequillasÎncă nu există evaluări
- MIT18 03SCF11 ps7 s27sDocument3 paginiMIT18 03SCF11 ps7 s27sLuca SebastianÎncă nu există evaluări
- Solved Problems in Quantum MechanicsDocument3 paginiSolved Problems in Quantum MechanicsMalvado Aun Mas MalvadoÎncă nu există evaluări
- 2021 AMAM Exam PaperDocument4 pagini2021 AMAM Exam PaperzeliawillscumbergÎncă nu există evaluări
- Analysis of 1-D Problems: 1 Where Are We Headed?Document8 paginiAnalysis of 1-D Problems: 1 Where Are We Headed?Haytham AlmaghariÎncă nu există evaluări
- Solving ForDocument3 paginiSolving ForNguyễn Phú ThạnhÎncă nu există evaluări
- 7phase Portraits Chaos FDDocument30 pagini7phase Portraits Chaos FDSantiago Garrido BullónÎncă nu există evaluări
- Solving ForDocument3 paginiSolving ForNguyễn Phú ThạnhÎncă nu există evaluări
- The parabola is a curve in R parameterized as follows: C= ~ γ (x) := x x 0 x ∈ (−1, 2) Document4 paginiThe parabola is a curve in R parameterized as follows: C= ~ γ (x) := x x 0 x ∈ (−1, 2) Forsen ShungiteÎncă nu există evaluări
- Solutions To Quiz 7Document2 paginiSolutions To Quiz 7Equaril14Încă nu există evaluări
- NCUMC18 SolutionsDocument7 paginiNCUMC18 SolutionsGlory OlalereÎncă nu există evaluări
- Problem Set 2 SolutionDocument10 paginiProblem Set 2 SolutionAbec One-offÎncă nu există evaluări
- Angular Velocity - Rigid Body - Intuitive Approach: Sin - P - T - PDocument9 paginiAngular Velocity - Rigid Body - Intuitive Approach: Sin - P - T - PKeith wongÎncă nu există evaluări
- Raking StoryDocument1 paginăRaking StoryRajendra Prasad R SÎncă nu există evaluări
- Math 7920 HW 4Document4 paginiMath 7920 HW 4rmknuppÎncă nu există evaluări
- A System of Reaction Diffusion Equations Modeling The Spread of Resistance To Anti-Malarial DrugsDocument15 paginiA System of Reaction Diffusion Equations Modeling The Spread of Resistance To Anti-Malarial DrugspostscriptÎncă nu există evaluări
- Polchinski String Theory SolutionsDocument18 paginiPolchinski String Theory SolutionsEvan Rule0% (1)
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesDe la EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesEvaluare: 1.5 din 5 stele1.5/5 (2)
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27De la EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27Încă nu există evaluări
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99De la EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Încă nu există evaluări
- RTS Slids Lec5Document17 paginiRTS Slids Lec5stephen562001Încă nu există evaluări
- RTS Slids Lec2Document21 paginiRTS Slids Lec2stephen562001Încă nu există evaluări
- RTS Slids Lec3Document12 paginiRTS Slids Lec3stephen562001Încă nu există evaluări
- RTS Slids Lec4Document21 paginiRTS Slids Lec4stephen562001Încă nu există evaluări
- RTS Slids Lec1Document11 paginiRTS Slids Lec1stephen562001Încă nu există evaluări
- Alus and Data Paths: Subtitle: How To Design The Data Path of A ProcessorDocument25 paginiAlus and Data Paths: Subtitle: How To Design The Data Path of A Processorstephen562001Încă nu există evaluări
- Cuyamaca College: Lecture Contact Hours: 48-54 Homework Hours: 96-108 Total Student Learning Hours: 144-162Document2 paginiCuyamaca College: Lecture Contact Hours: 48-54 Homework Hours: 96-108 Total Student Learning Hours: 144-162stephen562001Încă nu există evaluări
- Electronic Engineering Drawing & WorkshopDocument80 paginiElectronic Engineering Drawing & Workshopstephen562001Încă nu există evaluări
- Lecture01 IntroductionDocument48 paginiLecture01 Introductionstephen562001Încă nu există evaluări
- 10 Ways You Push Her Away Without Realizing ItDocument8 pagini10 Ways You Push Her Away Without Realizing Itstephen562001Încă nu există evaluări
- What Is The Difference Between Computer Science-Computer Engineering-ITDocument1 paginăWhat Is The Difference Between Computer Science-Computer Engineering-ITstephen562001Încă nu există evaluări
- Exploring Communications Applications: ObjectiveDocument5 paginiExploring Communications Applications: Objectivestephen562001Încă nu există evaluări
- AM and SSB Radio Applications: Ece 112 ActivityDocument1 paginăAM and SSB Radio Applications: Ece 112 Activitystephen562001Încă nu există evaluări
- Thevenin NortonDocument6 paginiThevenin Nortonstephen562001Încă nu există evaluări
- Miracle Grow Chart TemplateDocument45 paginiMiracle Grow Chart Templatestephen562001Încă nu există evaluări
- 9 Controller DiscretizationDocument8 pagini9 Controller Discretizationstephen562001Încă nu există evaluări
- Syllabus OBE TemplateDocument4 paginiSyllabus OBE Templatestephen562001Încă nu există evaluări
- Steam EngineDocument34 paginiSteam EnginematrixmanxflushÎncă nu există evaluări
- Mechanis Quizbee in Math and ScienceDocument4 paginiMechanis Quizbee in Math and ScienceChristine De San Jose80% (5)
- TM9-2350-311-20-1 - M109a2 & M109a3Document914 paginiTM9-2350-311-20-1 - M109a2 & M109a3Вадим ЗахарченкоÎncă nu există evaluări
- Aula Balancim DifusaoDocument29 paginiAula Balancim DifusaoGabrielAntoniazziÎncă nu există evaluări
- Header SizeDocument1 paginăHeader SizeNaufal HadiÎncă nu există evaluări
- kx0804 PDFDocument519 paginikx0804 PDFstefan corjuc100% (7)
- Merit-Order Effect of Wind Generation in The Philippines: Is Wind Integration Related To Lower Electricity Spot Market Clearing Price?Document1 paginăMerit-Order Effect of Wind Generation in The Philippines: Is Wind Integration Related To Lower Electricity Spot Market Clearing Price?Trei KremmeasÎncă nu există evaluări
- 5 Feeder Protection & Relay CoordinationDocument51 pagini5 Feeder Protection & Relay CoordinationSatya VasuÎncă nu există evaluări
- 1.diesel Engine AssemblyDocument22 pagini1.diesel Engine Assemblypepenapao1217Încă nu există evaluări
- Faults in Power SystemDocument14 paginiFaults in Power SystemHafizi IdrisÎncă nu există evaluări
- Storage and Dispensing of High Blend Ethanol Fuels Inc E 85 PDFDocument15 paginiStorage and Dispensing of High Blend Ethanol Fuels Inc E 85 PDFMurli RamchandranÎncă nu există evaluări
- Sinusifdv GB V301 R13-A5Document149 paginiSinusifdv GB V301 R13-A5Mr.K chÎncă nu există evaluări
- 100% NATEF Task Coverage: Automotive TechnologyDocument88 pagini100% NATEF Task Coverage: Automotive TechnologynhathoaÎncă nu există evaluări
- Act 3 (PHY LAB)Document4 paginiAct 3 (PHY LAB)Camille MagnoÎncă nu există evaluări
- Insulation CoordinationDocument75 paginiInsulation CoordinationDundi Kumar BevaraÎncă nu există evaluări
- AEH Company Profile-1Document14 paginiAEH Company Profile-1Hrishikesh RaiÎncă nu există evaluări
- PV Cell CharaDocument40 paginiPV Cell CharaBlessy JoyÎncă nu există evaluări
- STP75NF75 ST MicroelectronicsDocument16 paginiSTP75NF75 ST MicroelectronicsAloisio RibeiroÎncă nu există evaluări
- The Fluorescent Lighting System BY - Frank DurdaDocument97 paginiThe Fluorescent Lighting System BY - Frank Durdawas00266Încă nu există evaluări
- Design HydSysDocument1 paginăDesign HydSysManikandan RamalingamÎncă nu există evaluări
- Ca NLH 033 PDFDocument179 paginiCa NLH 033 PDFIsaac David Viloria PizarroÎncă nu există evaluări
- York Chiller Specifications (14654)Document11 paginiYork Chiller Specifications (14654)Игорь ДергачевÎncă nu există evaluări
- EP India 09-10 PDFDocument132 paginiEP India 09-10 PDFdbircs1981Încă nu există evaluări
- Design and Simulation of A Sine Wave Inverter With PID Control For Nonlinear Load ApplicationsDocument12 paginiDesign and Simulation of A Sine Wave Inverter With PID Control For Nonlinear Load ApplicationsReno ReoÎncă nu există evaluări
- Catalog Solar-PV String Inverters Hopewind V4.3.1Document14 paginiCatalog Solar-PV String Inverters Hopewind V4.3.1Atiq SaberÎncă nu există evaluări
- IT Chem F5 Mid-Year Examination (E)Document10 paginiIT Chem F5 Mid-Year Examination (E)Norzawati NoordinÎncă nu există evaluări
- Physics Thermal Chemical Current MCQDocument5 paginiPhysics Thermal Chemical Current MCQAyan GhoshÎncă nu există evaluări
- AMSOIL European Motor - 5W40Document2 paginiAMSOIL European Motor - 5W40Rafael Canizares ChiarandiÎncă nu există evaluări
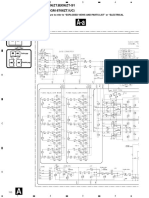
- 3.3 Schematic Diagram (Gm-8706Zt/Uc)Document12 pagini3.3 Schematic Diagram (Gm-8706Zt/Uc)qmarcelÎncă nu există evaluări
- DatasheetDocument13 paginiDatasheetkishore kumarÎncă nu există evaluări