S-ar putea să vă placă și
- Automotive Research HandbookDocument15 paginiAutomotive Research HandbookVinay Nagnath JokareÎncă nu există evaluări
- Auto Steer Farm Mlo96Document10 paginiAuto Steer Farm Mlo96rajeeseenivasanÎncă nu există evaluări
- Emea05 068Document50 paginiEmea05 068RenatoMattioliÎncă nu există evaluări
- Design of Wheel Alignment Measuring System Using Infrared TransmissionsDocument3 paginiDesign of Wheel Alignment Measuring System Using Infrared TransmissionsESHETU SILESHIÎncă nu există evaluări
- DFC System of Maintenance BY KAILASHDocument24 paginiDFC System of Maintenance BY KAILASHANOOP AGRAWALÎncă nu există evaluări
- Soben BA25Document2 paginiSoben BA25maheshnagarkarÎncă nu există evaluări
- Brochure Automotive enDocument24 paginiBrochure Automotive enpandiyarajmechÎncă nu există evaluări
- Railway Monitoring System PDFDocument12 paginiRailway Monitoring System PDFSanjana Singh100% (1)
- A Tool For Lap Time Simulation PDFDocument5 paginiA Tool For Lap Time Simulation PDFRodrigo BobÎncă nu există evaluări
- Technical Paper - IPWE 2018 PDFDocument410 paginiTechnical Paper - IPWE 2018 PDFSantosh IyerÎncă nu există evaluări
- Vehicles 03 00019 v2Document30 paginiVehicles 03 00019 v2Pierre GanÎncă nu există evaluări
- JujnovichCebon 8ISHVWDDocument16 paginiJujnovichCebon 8ISHVWDeyya 007Încă nu există evaluări
- Collins Bieniosek Snyder F08Document18 paginiCollins Bieniosek Snyder F08service5bÎncă nu există evaluări
- RTS Test Systems For Railway Vehicles enDocument12 paginiRTS Test Systems For Railway Vehicles enhumayun121Încă nu există evaluări
- Mhub 855Document2 paginiMhub 855ucb51525354Încă nu există evaluări
- What is a Self Driving CarDocument29 paginiWhat is a Self Driving CarDevendra PatilÎncă nu există evaluări
- Automatic Cruise ControlDocument16 paginiAutomatic Cruise ControlSiva SakthivelÎncă nu există evaluări
- 04244393Document12 pagini04244393nehabatra14Încă nu există evaluări
- Avionics Navigation SystemsDocument86 paginiAvionics Navigation SystemsIman GhÎncă nu există evaluări
- CarMaker WhitepaperDocument9 paginiCarMaker WhitepapersegiropiÎncă nu există evaluări
- Rajasthan State Road Transport CorporationDocument5 paginiRajasthan State Road Transport Corporationchandra1985Încă nu există evaluări
- Rutgers IEEE Student Branch 2011 IGVC team reportDocument15 paginiRutgers IEEE Student Branch 2011 IGVC team reportKenDaniswaraÎncă nu există evaluări
- Inspection & Maintenance Station (IMS) : National Institute For Automotive Inspection, Maintenance and TrainingDocument8 paginiInspection & Maintenance Station (IMS) : National Institute For Automotive Inspection, Maintenance and TrainingAjans VictorÎncă nu există evaluări
- Factsheet Track 2016 EnglishDocument16 paginiFactsheet Track 2016 EnglishkadagysÎncă nu există evaluări
- Experimental Study of High-Speed Rough-Terrain Mobile Robot Models For Reactive BehaviorsDocument10 paginiExperimental Study of High-Speed Rough-Terrain Mobile Robot Models For Reactive BehaviorsLuis VelascoÎncă nu există evaluări
- Autonomous Vehicle and Real Time Road Lanes Detection and TrackingDocument7 paginiAutonomous Vehicle and Real Time Road Lanes Detection and Trackingchahinez abdellaouiÎncă nu există evaluări
- Online Estimation of Vehicle InertialDocument6 paginiOnline Estimation of Vehicle InertialMF IqbalÎncă nu există evaluări
- Self-Driving Car Lane-Keeping Assist Using PID and Pure Pursuit ControlDocument6 paginiSelf-Driving Car Lane-Keeping Assist Using PID and Pure Pursuit ControlTiến Hoàng KimÎncă nu există evaluări
- Vehicle Body Testing: Application Note 1270-5Document2 paginiVehicle Body Testing: Application Note 1270-5ankita awasthiÎncă nu există evaluări
- Autonomous Automobile Trajectory Tracking For Off-Road Driving: Controller Design, Experimental Validation and RacingDocument6 paginiAutonomous Automobile Trajectory Tracking For Off-Road Driving: Controller Design, Experimental Validation and RacingprogisÎncă nu există evaluări
- Presented by M.Shino Prathibha Iii-It V.Priyanga Iii-ItDocument17 paginiPresented by M.Shino Prathibha Iii-It V.Priyanga Iii-ItkalanchiyaraniÎncă nu există evaluări
- An Introduction To Autonomous Vehicles - IDocument60 paginiAn Introduction To Autonomous Vehicles - IKHALID SALEHÎncă nu există evaluări
- Innovation-12-Zagazig University-2018-hpvc-South America - Ibrahim OufDocument5 paginiInnovation-12-Zagazig University-2018-hpvc-South America - Ibrahim OufCesar Gabriel Zapata CasariegoÎncă nu există evaluări
- Company ProfileDocument17 paginiCompany ProfilehappyharrÎncă nu există evaluări
- Vehicle dynamics assessmentDocument18 paginiVehicle dynamics assessmentSunilkumar ReddyÎncă nu există evaluări
- Design and Development of Anti-Roll Back Mechanism: V. D. Kolate, R. R. Kurup, A. M. LatakeDocument4 paginiDesign and Development of Anti-Roll Back Mechanism: V. D. Kolate, R. R. Kurup, A. M. LatakePreeti BhamreÎncă nu există evaluări
- Leveraging MATLAB-Simulink in Building Battery SOH Estimation PipelinesDocument22 paginiLeveraging MATLAB-Simulink in Building Battery SOH Estimation Pipelinestejas dhanagareÎncă nu există evaluări
- MotionSolve Automotive BrochureDocument2 paginiMotionSolve Automotive BrochureAnonymous ZC1ld1CLmÎncă nu există evaluări
- Project ProposalDocument2 paginiProject Proposalzetix1Încă nu există evaluări
- Main Project AbstractDocument2 paginiMain Project AbstractAjay YeruvaÎncă nu există evaluări
- Experimental Study of High-Speed Mobile Robot Reactive BehaviorsDocument10 paginiExperimental Study of High-Speed Mobile Robot Reactive BehaviorsAl WasimÎncă nu există evaluări
- Machines 10 00565Document31 paginiMachines 10 00565RAZIQ YOUSSEFÎncă nu există evaluări
- Modelling and Simulation of a Motor Vehicle SuspensionDocument10 paginiModelling and Simulation of a Motor Vehicle SuspensionAjeet PrasadÎncă nu există evaluări
- IRI Estimation by The Frequency Domain Analysis ofDocument8 paginiIRI Estimation by The Frequency Domain Analysis ofSteve LegrandÎncă nu există evaluări
- Experimental Study of A Fast Mobile Robot Performing A DriftDocument8 paginiExperimental Study of A Fast Mobile Robot Performing A Driftsyclops3Încă nu există evaluări
- Are ToDocument4 paginiAre ToBasilÎncă nu există evaluări
- In-Situ Torque Measurements in Hybrid Electric Vehicle PowertrainsDocument15 paginiIn-Situ Torque Measurements in Hybrid Electric Vehicle PowertrainspranjaljecÎncă nu există evaluări
- 100rail BoundRailFlawDetectionSystemProductProfileDocument2 pagini100rail BoundRailFlawDetectionSystemProductProfilebatuhan kılıçÎncă nu există evaluări
- SYLLABUS FOR AUTOMOBILE ENGINEERING 5TH SEMDocument30 paginiSYLLABUS FOR AUTOMOBILE ENGINEERING 5TH SEMAjayChouhanÎncă nu există evaluări
- Vehicle Dynamics of A Solar Racing CarDocument20 paginiVehicle Dynamics of A Solar Racing CarVikas KumarÎncă nu există evaluări
- J Measurement 2017 04 011Document9 paginiJ Measurement 2017 04 011Rushikesh SadavarteÎncă nu există evaluări
- Urban Traffic Trams - en PDFDocument10 paginiUrban Traffic Trams - en PDFFabian CorralesÎncă nu există evaluări
- A Review On Cooperative Adaptive Cruise Control (CACC) Systems: Architectures, Controls, and ApplicationsDocument39 paginiA Review On Cooperative Adaptive Cruise Control (CACC) Systems: Architectures, Controls, and ApplicationsChidananda BasavannaÎncă nu există evaluări
- Kadhim 2020 IOP Conf. Ser. Mater. Sci. Eng. 881 012128Document12 paginiKadhim 2020 IOP Conf. Ser. Mater. Sci. Eng. 881 012128hawicha AbomaÎncă nu există evaluări
- VartsilaDocument7 paginiVartsilaSanket NankarÎncă nu există evaluări
- Chip Simulation For Virtual Ecus: Dr. Yutaka MurataDocument22 paginiChip Simulation For Virtual Ecus: Dr. Yutaka MurataKi Rekso AljeroÎncă nu există evaluări
- Chip Simulation For Virtual Ecus: Dr. Yutaka MurataDocument22 paginiChip Simulation For Virtual Ecus: Dr. Yutaka MurataEvgeny KarpuninÎncă nu există evaluări
- JRM Vol27No3-225Full 9972225Document11 paginiJRM Vol27No3-225Full 9972225KrissaÎncă nu există evaluări
- A Tool For Lap Time SimulationDocument5 paginiA Tool For Lap Time SimulationRodrigo BobÎncă nu există evaluări
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisDe la EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisEvaluare: 4 din 5 stele4/5 (2)
- Control Desk Next Generation Platform ManagementDocument614 paginiControl Desk Next Generation Platform ManagementkarivenÎncă nu există evaluări
- 89 C 51 RE2Document187 pagini89 C 51 RE2Kumar AvnishÎncă nu există evaluări
- 6th Central Pay Commission Salary CalculatorDocument15 pagini6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Campeon Innovation Week 2016 RecapDocument4 paginiCampeon Innovation Week 2016 RecapkarivenÎncă nu există evaluări
- GATE Electrical Engineering Question & Answer KeyDocument76 paginiGATE Electrical Engineering Question & Answer KeykarivenÎncă nu există evaluări
- KingStar White-Paper D11Document22 paginiKingStar White-Paper D11karivenÎncă nu există evaluări
- MDO3000 Oscilloscope User Manual 077096801 7Document243 paginiMDO3000 Oscilloscope User Manual 077096801 7karivenÎncă nu există evaluări
- IIT - C Brochure 1 Feb 12Document31 paginiIIT - C Brochure 1 Feb 12Karthik VenkatÎncă nu există evaluări
- Expository TextsDocument2 paginiExpository TextsJodi PeitaÎncă nu există evaluări
- Theories & Models of LearningDocument33 paginiTheories & Models of LearningAna Paulina Suárez CervantesÎncă nu există evaluări
- Grade 9 SyllabusDocument23 paginiGrade 9 SyllabusClopzÎncă nu există evaluări
- Lab ReportDocument11 paginiLab Reportkelvinkiplaa845Încă nu există evaluări
- 4.6.6 Lab View Wired and Wireless Nic InformationDocument4 pagini4.6.6 Lab View Wired and Wireless Nic InformationThắng NguyễnÎncă nu există evaluări
- SAM Project 1bDocument13 paginiSAM Project 1bNolan Blair0% (2)
- Submitted By:: Kelsen's Pure Theory of LawDocument20 paginiSubmitted By:: Kelsen's Pure Theory of Lawjyoti chouhanÎncă nu există evaluări
- The 5th Edition of The World Health Organization Classification - of Haematolymphoid Tumours Myeloid and Histiocytic - Dendritic NeoplasmsDocument17 paginiThe 5th Edition of The World Health Organization Classification - of Haematolymphoid Tumours Myeloid and Histiocytic - Dendritic NeoplasmsADMINISTRACION LABORATORIO INTERMEDICAÎncă nu există evaluări
- Mahabharata Book 9 Shalya ParvaDocument413 paginiMahabharata Book 9 Shalya Parvaavacdis1969Încă nu există evaluări
- Service Agreement - Zeroid PDFDocument2 paginiService Agreement - Zeroid PDFYushau Muhammad LawalÎncă nu există evaluări
- Dslam Commissioning Steps Punjab For 960 PortDocument8 paginiDslam Commissioning Steps Punjab For 960 Portanl_bhn100% (1)
- Introduction To Wireless Communication - Radio CommunicationDocument21 paginiIntroduction To Wireless Communication - Radio CommunicationYas773Încă nu există evaluări
- Useful List of Responsive Navigation and Menu Patterns - UI Patterns - GibbonDocument16 paginiUseful List of Responsive Navigation and Menu Patterns - UI Patterns - Gibbonevandrix0% (1)
- Sample Format PDFDocument5 paginiSample Format PDFRhod R. AvisoÎncă nu există evaluări
- 1 Session1 DRR ConceptsDocument43 pagini1 Session1 DRR ConceptsHoneylet Ü FerolÎncă nu există evaluări
- Rabbi Shneur Zalman of Liadi - Lessons in Tanya Vol-1Document474 paginiRabbi Shneur Zalman of Liadi - Lessons in Tanya Vol-1Exequiel Medina83% (6)
- History of Technical Writing HardDocument4 paginiHistory of Technical Writing HardAllyMae LopezÎncă nu există evaluări
- Villanueva - Taxation and Regulatory ComplianceDocument8 paginiVillanueva - Taxation and Regulatory ComplianceEDRICK ESPARRAGUERRAÎncă nu există evaluări
- GX Audit Internal Audit Risk and Opportunities For 2022Document26 paginiGX Audit Internal Audit Risk and Opportunities For 2022Muhammad SamiÎncă nu există evaluări
- Syllabus 2012 Singing 20190122Document91 paginiSyllabus 2012 Singing 20190122suzypienaarÎncă nu există evaluări
- FDocument109 paginiFssissaaÎncă nu există evaluări
- UI Symphony Orchestra and Choirs Concert Features Mahler's ResurrectionDocument17 paginiUI Symphony Orchestra and Choirs Concert Features Mahler's ResurrectionJilly CookeÎncă nu există evaluări
- Galway Music Officer RoleDocument20 paginiGalway Music Officer RoleJohanna KennyÎncă nu există evaluări
- ABV Testing Performa For ICF CoachesDocument2 paginiABV Testing Performa For ICF Coachesmicell dieselÎncă nu există evaluări
- Red Lion MP Sensor Product Manual PDFDocument2 paginiRed Lion MP Sensor Product Manual PDFJigneshÎncă nu există evaluări
- Theoritical and Applied LinguisticDocument6 paginiTheoritical and Applied LinguisticOdonkz Forrealracingtiga100% (2)
- Odoo Video Conference User GuidesDocument12 paginiOdoo Video Conference User GuidesZeus TitanÎncă nu există evaluări
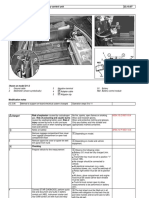
- Checking battery control unitDocument3 paginiChecking battery control unitjuanÎncă nu există evaluări
- Heat Exchangers: Thermal Activity and Fluid MotionDocument14 paginiHeat Exchangers: Thermal Activity and Fluid Motionishu vohraÎncă nu există evaluări