S-ar putea să vă placă și
- Dulce de Leche LabDocument19 paginiDulce de Leche LabRichard MisericordiaÎncă nu există evaluări
- Informe de Mejora de Productos Con La Incorporación de TicDocument10 paginiInforme de Mejora de Productos Con La Incorporación de TicCarlos Maira Murillo89% (9)
- Microprocesador 8085Document7 paginiMicroprocesador 8085Percy VillegasÎncă nu există evaluări
- RFI Gestión DocumentalDocument16 paginiRFI Gestión DocumentalJesus Polo FernandezÎncă nu există evaluări
- Instrucciones para Programar El Microcontrolador msp430Document4 paginiInstrucciones para Programar El Microcontrolador msp430nomancheselpisoÎncă nu există evaluări
- InformeN1 LabMicroDocument6 paginiInformeN1 LabMicroKarina Vega MirandaÎncă nu există evaluări
- Jose Vicente Cruz CruzDocument3 paginiJose Vicente Cruz CruzJose V. CruzÎncă nu există evaluări
- ProyectoFinal VLSIDocument7 paginiProyectoFinal VLSIAdrián PilataxiÎncă nu există evaluări
- Guia de OPC KEPServerExDocument11 paginiGuia de OPC KEPServerExJaime Vargas100% (1)
- Ejercicio VLSMDocument1 paginăEjercicio VLSMJoffre AsencioÎncă nu există evaluări
- 1.4.1.3 Packet Tracer - Skills Integration Challenge EIGRP InstructionsDocument5 pagini1.4.1.3 Packet Tracer - Skills Integration Challenge EIGRP InstructionsJavier Alejandro100% (1)
- Ci MM74C922Document9 paginiCi MM74C922JOSE FRANCIA ZORRILLAÎncă nu există evaluări
- 2 - Ucpic18f2550 2017Document37 pagini2 - Ucpic18f2550 2017hipolitoÎncă nu există evaluări
- Actividad 1.3bDocument4 paginiActividad 1.3bErick IsmaelÎncă nu există evaluări
- Manuals7+infilink C YDocument19 paginiManuals7+infilink C YErick CoronelÎncă nu există evaluări
- Practica 3 MICROCOMPUTADORAS FI UNAMDocument7 paginiPractica 3 MICROCOMPUTADORAS FI UNAMLiliana Martinez Ramírez0% (1)
- Curso General Automata Programable OmronDocument96 paginiCurso General Automata Programable OmronJavi Cascant100% (1)
- Lab07 Otras Estructuras Industriales de PIDDocument12 paginiLab07 Otras Estructuras Industriales de PIDVictor Stiven LizanaÎncă nu există evaluări
- Resumen de Capitulos Modulo 2Document29 paginiResumen de Capitulos Modulo 2Maria Teresa Escobar RamirezÎncă nu există evaluări
- LabVIEW Robotics Starter KitDocument11 paginiLabVIEW Robotics Starter KitToño MontielÎncă nu există evaluări
- Entorno de Desarrollo Integrado para La Programacion de Micro Control Adores PIC16F84Document5 paginiEntorno de Desarrollo Integrado para La Programacion de Micro Control Adores PIC16F84MarlonÎncă nu există evaluări
- LABORATORIO 05 - 2 Contadores AsincronosDocument5 paginiLABORATORIO 05 - 2 Contadores AsincronosDarwin YoverdÎncă nu există evaluări
- Informe PLC BatchDocument12 paginiInforme PLC BatchSebastian Castro100% (1)
- Informe 1 PotenciaDocument3 paginiInforme 1 PotenciaDanny MantillaÎncă nu există evaluări
- 555 Un Potente Temporizador (Lanz Extraordinario) - SE131 PDFDocument4 pagini555 Un Potente Temporizador (Lanz Extraordinario) - SE131 PDFCambiando CaminosÎncă nu există evaluări
- DslamDocument7 paginiDslamAnonymous d0J9xGuLZoÎncă nu există evaluări
- Distintos Tipos de Convertidores Análogos y DigitalesDocument4 paginiDistintos Tipos de Convertidores Análogos y DigitalesAlber Lim GboÎncă nu există evaluări
- Avance Electronicos IIDocument9 paginiAvance Electronicos IIGianmarcoAcevedoÎncă nu există evaluări
- Barrido Display AvrDocument3 paginiBarrido Display AvrSantiago CalleÎncă nu există evaluări
- Acoplamiento de ContadoresDocument9 paginiAcoplamiento de ContadoresAnonymous jv3i8NAÎncă nu există evaluări
- Lab - 5 - Comunicacion Serial I2C PDFDocument9 paginiLab - 5 - Comunicacion Serial I2C PDFJUAN DIAZ MAMANIÎncă nu există evaluări
- Registros GPIO TM4C123G Unicamente Rev4Document7 paginiRegistros GPIO TM4C123G Unicamente Rev4GloayzaÎncă nu există evaluări
- Transistor de Efecto de CampoDocument51 paginiTransistor de Efecto de CampoMaria Alejandra Cardozo GuzmanÎncă nu există evaluări
- Resumen Del Procesador DLXDocument4 paginiResumen Del Procesador DLXPedro AntonÎncă nu există evaluări
- Diseño de Circuitos Combinacionales en VHDLDocument6 paginiDiseño de Circuitos Combinacionales en VHDLPablo PulacheÎncă nu există evaluări
- Manipulacion de Puertos en Lenguaje CDocument12 paginiManipulacion de Puertos en Lenguaje CSalvador Soria SalgadoÎncă nu există evaluări
- Protocolo MODBUSDocument3 paginiProtocolo MODBUSJan Carlos Espinoza GavilanÎncă nu există evaluări
- Instructivo de Configuración RSTPDocument13 paginiInstructivo de Configuración RSTPWillian PalacioÎncă nu există evaluări
- Modulo Adc Atmega8Document21 paginiModulo Adc Atmega8Rafael RamoscordovaÎncă nu există evaluări
- Reporte 6 - Lab Electrónica II-2Document15 paginiReporte 6 - Lab Electrónica II-2davidcder90Încă nu există evaluări
- 10.4.1.1 Packet TracerDocument3 pagini10.4.1.1 Packet TracerNidhogg De Leon0% (1)
- Arduino Due Agosoto-2018-Tarea1Document6 paginiArduino Due Agosoto-2018-Tarea1koÎncă nu există evaluări
- Control PID Con Labview y TIA Portal PDFDocument7 paginiControl PID Con Labview y TIA Portal PDFAndres DavidÎncă nu există evaluări
- Diseño Con Pic Cerradura ElectronicaDocument10 paginiDiseño Con Pic Cerradura ElectronicaJuan David Barrera Granados100% (1)
- Uso de Entrada Analógica y Manejo de Display AlfanuméricoDocument3 paginiUso de Entrada Analógica y Manejo de Display Alfanuméricouruk529Încă nu există evaluări
- 5 Respuesta TransitoriaDocument11 pagini5 Respuesta TransitoriaRichard GarciaÎncă nu există evaluări
- Preparatorio 6 Sistemas Microprocesados EPNDocument5 paginiPreparatorio 6 Sistemas Microprocesados EPNxavier2ramos-1Încă nu există evaluări
- Generador de Ondas Cuadradas para ArduinoDocument2 paginiGenerador de Ondas Cuadradas para ArduinoPierDonneeÎncă nu există evaluări
- Informe Programador Pic Usb 1Document21 paginiInforme Programador Pic Usb 1JalexanderhgÎncă nu există evaluări
- Tutorial Verilog V1 PDFDocument15 paginiTutorial Verilog V1 PDFNeTSk8Încă nu există evaluări
- Protocolo de Enrutamiento RIP GNS3Document6 paginiProtocolo de Enrutamiento RIP GNS3Juan IngaÎncă nu există evaluări
- 5.1.3.7 Lab - Configuring 802.1Q Trunk-Based Inter-VLAN RoutingDocument15 pagini5.1.3.7 Lab - Configuring 802.1Q Trunk-Based Inter-VLAN RoutingMiguel Jiménez100% (1)
- Comunicacion Cable Rs232 PLC y PanelviewDocument10 paginiComunicacion Cable Rs232 PLC y PanelviewarturoÎncă nu există evaluări
- Leccion 14Document28 paginiLeccion 14YeissonCandelaÎncă nu există evaluări
- Lab15 CDI C5B PDFDocument21 paginiLab15 CDI C5B PDFJonas Palomino ZavalaÎncă nu există evaluări
- Diagrama de Flujo o Algoritmo Del Metodo de Acceso CsmaDocument1 paginăDiagrama de Flujo o Algoritmo Del Metodo de Acceso CsmaJediael LopezÎncă nu există evaluări
- Diseñe Filtros Paso Bajo Con MATLABDocument50 paginiDiseñe Filtros Paso Bajo Con MATLABBenyhi MantillaÎncă nu există evaluări
- Informe Final 4 - Ci 74ls194Document8 paginiInforme Final 4 - Ci 74ls194edsonygisellaÎncă nu există evaluări
- Especialidad de Electrónica y Automatización IndustrialDocument13 paginiEspecialidad de Electrónica y Automatización IndustrialleonardoÎncă nu există evaluări
- Displays de 7 SegmentosDocument7 paginiDisplays de 7 SegmentosJOS999Încă nu există evaluări
- Comunicación RS485 Con Arduino PDFDocument11 paginiComunicación RS485 Con Arduino PDFLuis FuentesÎncă nu există evaluări
- Comunicación RS485 Con ArduinoDocument1 paginăComunicación RS485 Con ArduinopredeleytorÎncă nu există evaluări
- Lab. 4 Comunicacion de DatosDocument19 paginiLab. 4 Comunicacion de DatosJorge Luis Carranza LujanÎncă nu există evaluări
- Manual Teórico-Práctico de Ingeniería DecompletaciónDocument313 paginiManual Teórico-Práctico de Ingeniería DecompletaciónBernardo HernandezÎncă nu există evaluări
- Eficiencia de Barrido VolumétricoDocument5 paginiEficiencia de Barrido VolumétricoRichard MisericordiaÎncă nu există evaluări
- TOP Server v6 - ActivaciónDocument12 paginiTOP Server v6 - ActivaciónRichard MisericordiaÎncă nu există evaluări
- Tensiómetro Digital PortátilDocument9 paginiTensiómetro Digital PortátilRichard MisericordiaÎncă nu există evaluări
- Informes TécnicosDocument17 paginiInformes TécnicosRichard MisericordiaÎncă nu există evaluări
- Cacao PDF de InternetDocument17 paginiCacao PDF de InternetVictor TemperaÎncă nu există evaluări
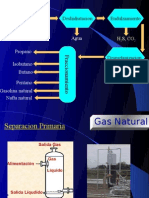
- Presentacion 2 Gas NaturalDocument14 paginiPresentacion 2 Gas NaturalRichard MisericordiaÎncă nu există evaluări
- Geofísica y Los DronesDocument6 paginiGeofísica y Los DronesKevin CaleroÎncă nu există evaluări
- 1.4.7 Packet Tracer - Configure Router InterfacesDocument2 pagini1.4.7 Packet Tracer - Configure Router InterfacesGuimerlin Vallejo ZabalaÎncă nu există evaluări
- Matriz de RiesgoDocument6 paginiMatriz de RiesgoWiliam Leonardo Reyes GonzalezÎncă nu există evaluări
- Dreams of DesireDocument7 paginiDreams of DesireMiguelangel PancasÎncă nu există evaluări
- 8-17-Anexo 1 - Detalle de Anexos TDRDocument13 pagini8-17-Anexo 1 - Detalle de Anexos TDRENERDAULE CORTEÎncă nu există evaluări
- Foro EncriptacionDocument4 paginiForo EncriptacionDeivi LachapelÎncă nu există evaluări
- Lab 14Document5 paginiLab 14Jose Bejarano QuispeÎncă nu există evaluări
- Vitodens 100W B1KFDocument75 paginiVitodens 100W B1KFjhonatanÎncă nu există evaluări
- Estudio Del TrabajoDocument7 paginiEstudio Del TrabajoDivadÎncă nu există evaluări
- Guia GmailDocument17 paginiGuia GmailIván SánchezÎncă nu există evaluări
- Entregables Excel - Enoc Calampa RuizDocument25 paginiEntregables Excel - Enoc Calampa RuizFélix Saúl Chapa ApazaÎncă nu există evaluări
- Cap 9 ResumenDocument11 paginiCap 9 ResumenOeylin SotoÎncă nu există evaluări
- PDF Controles Basicos 2 - Login CadenasDocument4 paginiPDF Controles Basicos 2 - Login CadenasYanick DeLa Torre100% (1)
- Cómo Conectar El FPA 5000 A BIS Por OPCDocument23 paginiCómo Conectar El FPA 5000 A BIS Por OPCIvan Dario Zamudio RealÎncă nu există evaluări
- Asientos Contables - Ejemplos y Ejercicios ResueltosDocument20 paginiAsientos Contables - Ejemplos y Ejercicios ResueltosjchuquisanlÎncă nu există evaluări
- Tipos de Roscas y Parametros PrincipalesDocument6 paginiTipos de Roscas y Parametros PrincipalesManuel Martin FernandezÎncă nu există evaluări
- Mantenimiento Conductores y SolucionesDocument17 paginiMantenimiento Conductores y SolucionesAlejandro IralÎncă nu există evaluări
- Formato - Inventario CCTVDocument41 paginiFormato - Inventario CCTVauxiliar sistemasÎncă nu există evaluări
- El Correo ElectrónicoDocument26 paginiEl Correo ElectrónicoDamarisÎncă nu există evaluări
- Manual Rtu5024 Español PDFDocument11 paginiManual Rtu5024 Español PDFPatricio Ulloa100% (1)
- UanDocument126 paginiUanJulian Andres SerranoÎncă nu există evaluări
- Mapa Politico Europa MudoDocument1 paginăMapa Politico Europa MudoFrancisco JavierÎncă nu există evaluări
- Parcelador Informática 2017Document4 paginiParcelador Informática 2017EDGAR LEONARDO SANTOS B.Încă nu există evaluări
- Guía de Aprendizaje Grados Onces 1 y 3 Docente LilaDocument3 paginiGuía de Aprendizaje Grados Onces 1 y 3 Docente LilaEmmily HernandezÎncă nu există evaluări
- Resumen Capítulo 11 BrianoDocument9 paginiResumen Capítulo 11 BrianoSol ScheidereiterÎncă nu există evaluări
- Bg871 - Apertura de Cuenta Per. NaturalDocument2 paginiBg871 - Apertura de Cuenta Per. NaturalRodrigo FernandezÎncă nu există evaluări
- Factura CuidmediaDocument2 paginiFactura CuidmediaCuid MediaÎncă nu există evaluări
- Posicionador Electroneumatico EP500 Estandar SB P343 48 ESDocument2 paginiPosicionador Electroneumatico EP500 Estandar SB P343 48 ESGabriela MoralesÎncă nu există evaluări