S-ar putea să vă placă și
- Unit 1 Shaft, Key, Splines, Couplings, Bearings, Clutch and BrakeDocument200 paginiUnit 1 Shaft, Key, Splines, Couplings, Bearings, Clutch and BrakeAbhijeet somawarÎncă nu există evaluări
- Scotch YokeDocument7 paginiScotch YokeSandeela NaveedÎncă nu există evaluări
- Couplings and ClutchesDocument14 paginiCouplings and ClutchesBhotka BhutkiÎncă nu există evaluări
- Dynamixel GuideDocument7 paginiDynamixel GuidemsdoharÎncă nu există evaluări
- Unit 4 Balancingofrotatingmasses 131127012048 Phpapp01Document53 paginiUnit 4 Balancingofrotatingmasses 131127012048 Phpapp01adarsh pushpan100% (1)
- Synthetic AdditivesDocument5 paginiSynthetic AdditivesJako MishyÎncă nu există evaluări
- Mechanics of Machines ME2031: Lab Instructor: Awais LiaqatDocument12 paginiMechanics of Machines ME2031: Lab Instructor: Awais LiaqatAnonymous B0cm7LZhÎncă nu există evaluări
- Motion Control Basics PDFDocument8 paginiMotion Control Basics PDFFouad ElhajjiÎncă nu există evaluări
- Backstops FailureDocument7 paginiBackstops FailureLLÎncă nu există evaluări
- Design and Analysis of Indexing Cam Mechanism WithDocument11 paginiDesign and Analysis of Indexing Cam Mechanism WithDragan KrsticÎncă nu există evaluări
- The Synthesis of Elliptical Gears Generated by Shaper-CuttersDocument9 paginiThe Synthesis of Elliptical Gears Generated by Shaper-CuttersBen TearleÎncă nu există evaluări
- Force Analysis - PPSXDocument107 paginiForce Analysis - PPSXÖmer Faruk EkizÎncă nu există evaluări
- (Ricardo, Ponce) 16-Essential Hydraulic Components - Maintenance R2Document27 pagini(Ricardo, Ponce) 16-Essential Hydraulic Components - Maintenance R2Raúl Marcelo Veloz100% (1)
- Unit IV Question Bank MV 2019 MDOFs PDFDocument2 paginiUnit IV Question Bank MV 2019 MDOFs PDFSachin BharadwajÎncă nu există evaluări
- Cam TutorialDocument26 paginiCam Tutorialtechnology firstÎncă nu există evaluări
- Astm A216Document4 paginiAstm A216salazaralexi100% (1)
- Slider Crank MechanismDocument22 paginiSlider Crank MechanismSmart100% (1)
- Velocidad Critica de Un EjeDocument12 paginiVelocidad Critica de Un EjeFranciscoÎncă nu există evaluări
- Resonance and Analysis of Barton's Pendulum PDFDocument17 paginiResonance and Analysis of Barton's Pendulum PDFmailbox_afeef2Încă nu există evaluări
- 1221.2 1221.3 en Year 2009Document295 pagini1221.2 1221.3 en Year 2009crismg1100% (1)
- Design of Transmission Systems Question Bank - GGDocument27 paginiDesign of Transmission Systems Question Bank - GGR RameshÎncă nu există evaluări
- Crank and Slotted Lever Quick Return (Rev2)Document9 paginiCrank and Slotted Lever Quick Return (Rev2)Vipin YadavÎncă nu există evaluări
- Report On Four Bar Mechanism of Sewing MachineDocument8 paginiReport On Four Bar Mechanism of Sewing MachineshazedislamÎncă nu există evaluări
- Quick Return Mechanism For Shaper Machine (Hydraulic Circuit)Document12 paginiQuick Return Mechanism For Shaper Machine (Hydraulic Circuit)Rushikesh BachhavÎncă nu există evaluări
- Mechanisms Final ReportDocument44 paginiMechanisms Final ReportOmar SaleemÎncă nu există evaluări
- hyosung-SF50 RushDocument144 paginihyosung-SF50 RushJason QuickÎncă nu există evaluări
- Gujarat Technological University: W.E.F. AY 2018-19Document3 paginiGujarat Technological University: W.E.F. AY 2018-19Bhavesh Patel100% (1)
- MSD PPT Powerpoint PresentationDocument11 paginiMSD PPT Powerpoint PresentationSachin KumbharÎncă nu există evaluări
- Planer Quick Return MechanismDocument21 paginiPlaner Quick Return MechanismchristadcrÎncă nu există evaluări
- Cam Vice ReportDocument52 paginiCam Vice ReportAnonymous rvhOrVmmbÎncă nu există evaluări
- Ball Traction Drive - FinalDocument46 paginiBall Traction Drive - FinalTejas Shete0% (1)
- 2robot Applications Main8Document55 pagini2robot Applications Main8saikumarÎncă nu există evaluări
- Angle and Tilting Vice - SynopsisDocument6 paginiAngle and Tilting Vice - SynopsisTanvi Khurana100% (3)
- Stepper Motor CatalogueDocument28 paginiStepper Motor CatalogueSuvek KumarÎncă nu există evaluări
- Cam and Follower: Omar Ahmad Ali Ayman Mohammad Alkhwiter Eid Sunhat AlharbiDocument17 paginiCam and Follower: Omar Ahmad Ali Ayman Mohammad Alkhwiter Eid Sunhat AlharbiOmar AhmedÎncă nu există evaluări
- Me III II DMM II LnotesDocument33 paginiMe III II DMM II LnotesChandu MallamÎncă nu există evaluări
- Lab Manual For Kinematics of MachinesDocument18 paginiLab Manual For Kinematics of Machinesshailendra_236Încă nu există evaluări
- Kinematics and Dynamics of Machinery Lab ManualDocument63 paginiKinematics and Dynamics of Machinery Lab ManualsaranÎncă nu există evaluări
- ME 143: Mechanics of Machinery-1: Dr. Aly Mousaad AlyDocument24 paginiME 143: Mechanics of Machinery-1: Dr. Aly Mousaad AlyAjmal MohammedÎncă nu există evaluări
- Tilting and Angle ViceDocument36 paginiTilting and Angle ViceBoopathi KalaiÎncă nu există evaluări
- Experiment No.1Document8 paginiExperiment No.1Awais AhmadÎncă nu există evaluări
- Syringe Actuated Mechanical ArmDocument17 paginiSyringe Actuated Mechanical ArmMohd Subhan0% (1)
- Automatic Drilling Machine Using PLC IJISETDocument6 paginiAutomatic Drilling Machine Using PLC IJISETTimothy FieldsÎncă nu există evaluări
- Gearless Transmission Using Elbow MechanismDocument32 paginiGearless Transmission Using Elbow Mechanismsanoop joseÎncă nu există evaluări
- Slider Crank Dynamics Lab ExperimentsDocument8 paginiSlider Crank Dynamics Lab ExperimentsMuhammad ALI NoorÎncă nu există evaluări
- Design and Fabrication of A GripperDocument8 paginiDesign and Fabrication of A Gripperengr_faheemÎncă nu există evaluări
- The Importance of Profile Shift, Root Angle Correction and Cutter Head TiltDocument4 paginiThe Importance of Profile Shift, Root Angle Correction and Cutter Head TiltvijaykumarnÎncă nu există evaluări
- Hoist 1-2Document9 paginiHoist 1-2Wee Soon ChaiÎncă nu există evaluări
- Multibody System Simulation With SimmechanicsDocument24 paginiMultibody System Simulation With SimmechanicsSonny Jason AÎncă nu există evaluări
- 1.0 Job/Experiment No.: Me594/05 2.0 NAME OF EXPERIMENT: Angle Measurement Using Sine Bar & SlipDocument6 pagini1.0 Job/Experiment No.: Me594/05 2.0 NAME OF EXPERIMENT: Angle Measurement Using Sine Bar & SlipHimanshu Vasistha0% (1)
- Robot SpecificationsDocument5 paginiRobot SpecificationsRajeesh JÎncă nu există evaluări
- Compliant Linkage MechanismsDocument8 paginiCompliant Linkage MechanismsKGSG100Încă nu există evaluări
- Robotic Arm Micro Controller ProjectDocument13 paginiRobotic Arm Micro Controller Projectroyal1979Încă nu există evaluări
- National Institute of Technology, Rourkela B. Tech. (6 Semester), Mechanical Engineering, Mid-Semester, Spring (2021-22)Document9 paginiNational Institute of Technology, Rourkela B. Tech. (6 Semester), Mechanical Engineering, Mid-Semester, Spring (2021-22)Md. Tariqul Islam MunnaÎncă nu există evaluări
- Gearless Transmission Research PaperDocument10 paginiGearless Transmission Research PaperresonancebansalÎncă nu există evaluări
- MMAM (21ME54), Assignment-2., 2023-24Document1 paginăMMAM (21ME54), Assignment-2., 2023-24pranamnathanielrajÎncă nu există evaluări
- TOM-II Lab ManualDocument41 paginiTOM-II Lab ManualAli UsmanÎncă nu există evaluări
- Shaper Slotter PlannerDocument21 paginiShaper Slotter PlannerPraveen Mathi100% (1)
- Open Ended LabDocument7 paginiOpen Ended LabSaad AliKhanÎncă nu există evaluări
- Balancing of InlineDocument25 paginiBalancing of InlinePankajBhamare50% (2)
- Taper Turning by Tail Stock Offset MethodDocument3 paginiTaper Turning by Tail Stock Offset MethodZia JanÎncă nu există evaluări
- Theory of Machines - Lab ManualDocument28 paginiTheory of Machines - Lab ManualHoneyÎncă nu există evaluări
- Linkages: 2.1. FOUR - Bar LinkageDocument29 paginiLinkages: 2.1. FOUR - Bar LinkageaddisudagneÎncă nu există evaluări
- Differential Transformation Method for Mechanical Engineering ProblemsDe la EverandDifferential Transformation Method for Mechanical Engineering ProblemsÎncă nu există evaluări
- Tutorial: Turbulent Flow in A Compact Heat Exchanger: C ANSYS, Inc. March 6, 2012Document15 paginiTutorial: Turbulent Flow in A Compact Heat Exchanger: C ANSYS, Inc. March 6, 2012wasemÎncă nu există evaluări
- IC Engine QuestionsDocument18 paginiIC Engine QuestionswasemÎncă nu există evaluări
- IC Engine QuestionsDocument18 paginiIC Engine QuestionswasemÎncă nu există evaluări
- Fundamentals - of - Signals - and - Systems - Using - Web - and - Matlab SolutionsDocument433 paginiFundamentals - of - Signals - and - Systems - Using - Web - and - Matlab SolutionsMeseret BeyeneÎncă nu există evaluări
- Islamic University of Gaz1Document1 paginăIslamic University of Gaz1wasemÎncă nu există evaluări
- Islamic University of Gaza Faculty of Engineering Department of Mechanical EngineeringDocument9 paginiIslamic University of Gaza Faculty of Engineering Department of Mechanical EngineeringwasemÎncă nu există evaluări
- Chapter 1Document26 paginiChapter 1wasemÎncă nu există evaluări
- Report 2Document10 paginiReport 2wasemÎncă nu există evaluări
- Experiment 4Document10 paginiExperiment 4wasemÎncă nu există evaluări
- Engines: Islamic University of Gaza Faculty of Engineering Department of Mechanical EngineeringDocument6 paginiEngines: Islamic University of Gaza Faculty of Engineering Department of Mechanical EngineeringwasemÎncă nu există evaluări
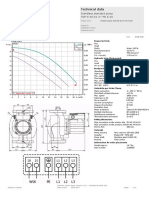
- BOMBAS PRIMARIAS - Data - Sheet - TOP-S - 40 - 10 - 3 - PN - 6 - 10Document1 paginăBOMBAS PRIMARIAS - Data - Sheet - TOP-S - 40 - 10 - 3 - PN - 6 - 10Sebastian FuentesÎncă nu există evaluări
- Chemical Engineering and Physical and Chemical Principles QuestionsDocument84 paginiChemical Engineering and Physical and Chemical Principles QuestionsMark Vincent EspinosaÎncă nu există evaluări
- Solving Problems On Projectiles PDFDocument4 paginiSolving Problems On Projectiles PDFVenkata Allamsetty100% (1)
- Static Pitot Tube: Flow MeasurementDocument23 paginiStatic Pitot Tube: Flow MeasurementMuthu KarthikÎncă nu există evaluări
- CWCH4IN Instal Manual WebDocument39 paginiCWCH4IN Instal Manual WebEnrique ScibiliaÎncă nu există evaluări
- Numerical Modelling and Computation Methods of Concrete Face Rockfill DamDocument2 paginiNumerical Modelling and Computation Methods of Concrete Face Rockfill DamTony ChanÎncă nu există evaluări
- EVO165DR GreenMech HäckslerDocument54 paginiEVO165DR GreenMech HäckslerontoptreeworkerÎncă nu există evaluări
- TM1478 John Deere 655B, 755B Crawler Loader Repair Technical ManualDocument13 paginiTM1478 John Deere 655B, 755B Crawler Loader Repair Technical ManualtteelsarsÎncă nu există evaluări
- Valve Range Strainer SupplierDocument8 paginiValve Range Strainer SupplierRAVIKIRAN BARDEÎncă nu există evaluări
- GuyhirnDocument4 paginiGuyhirnTyburnÎncă nu există evaluări
- CH 3 Review Load and Stress AnalysisDocument33 paginiCH 3 Review Load and Stress AnalysisAnas TubailÎncă nu există evaluări
- AOS Voltex Hybrid Electric Heat Pump English CANXE50004 - 1015Document2 paginiAOS Voltex Hybrid Electric Heat Pump English CANXE50004 - 1015Pat AuffretÎncă nu există evaluări
- 08 Plasticity 03 Yield CriteriaDocument21 pagini08 Plasticity 03 Yield Criteria한종훈100% (1)
- Theoretical Plates Calculation by McCabe-Thiele Method PDFDocument4 paginiTheoretical Plates Calculation by McCabe-Thiele Method PDFGODWIN ANYIMAHÎncă nu există evaluări
- DSS PMT Part 1Document57 paginiDSS PMT Part 12KE18CV007 D R ANJITHA CivilÎncă nu există evaluări
- Product Sheet 2002-2111 DN32-DN350Document2 paginiProduct Sheet 2002-2111 DN32-DN350Justin ReyesÎncă nu există evaluări
- Mos Mid Question BankDocument24 paginiMos Mid Question BankJohny SkÎncă nu există evaluări
- Class 12 - 24Document1.000 paginiClass 12 - 24Sathish KumarÎncă nu există evaluări
- Hiace Techstream 1st RunDocument3 paginiHiace Techstream 1st RunStephen MasemoÎncă nu există evaluări
- UPTO-DATE Daily Progress Report 07-02-2024-DIDocument1 paginăUPTO-DATE Daily Progress Report 07-02-2024-DIMobin Thomas AbrahamÎncă nu există evaluări
- Ambient Vaporizers - High Pressure: Manufactured by CryovationDocument6 paginiAmbient Vaporizers - High Pressure: Manufactured by CryovationemilasanovskiÎncă nu există evaluări
- Axial Deformation On FramesDocument31 paginiAxial Deformation On FramesAndy OretaÎncă nu există evaluări
- Modular Simulation Software Development For Liquid Propellant Rocket Engines Based On MATLAB SimulinkDocument7 paginiModular Simulation Software Development For Liquid Propellant Rocket Engines Based On MATLAB SimulinkĐinh Quốc TríÎncă nu există evaluări
- Hydraulic Jet PumpDocument3 paginiHydraulic Jet Pumpvictor javier nuñezÎncă nu există evaluări