S-ar putea să vă placă și
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Automatic Chessboard Detection For Intrinsic and Extrinsic CameraDocument18 paginiAutomatic Chessboard Detection For Intrinsic and Extrinsic CameraVga ValentineÎncă nu există evaluări
- Andrews WVC2013 FinalDocument7 paginiAndrews WVC2013 FinalhelakaraaÎncă nu există evaluări
- Euler Angles From Rotation MatrixDocument7 paginiEuler Angles From Rotation MatrixRaja Amer AzimÎncă nu există evaluări
- Alignment BasicsDocument11 paginiAlignment BasicshelakaraaÎncă nu există evaluări
- Cui 2015Document7 paginiCui 2015helakaraaÎncă nu există evaluări
- Sbmc Chapitre 2 - Etude Du ΜC STM32 - CopieDocument27 paginiSbmc Chapitre 2 - Etude Du ΜC STM32 - CopiehelakaraaÎncă nu există evaluări
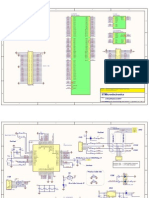
- STM32F4Discovery SchematicDocument6 paginiSTM32F4Discovery SchematicAda CsabaÎncă nu există evaluări
- LIS302DL MEMS AccelerometerDocument42 paginiLIS302DL MEMS AccelerometerMohammed Mushtaha100% (1)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Expert - VMAX All Flash and VMAX3 Solutions 2.0: Certification DescriptionDocument4 paginiExpert - VMAX All Flash and VMAX3 Solutions 2.0: Certification DescriptionuthramÎncă nu există evaluări
- Types of ComutersDocument15 paginiTypes of Comuterswilsondec25Încă nu există evaluări
- Curriculum Vitae: P. Ajay Kumar ReddyDocument3 paginiCurriculum Vitae: P. Ajay Kumar ReddyAbhinavHarshalÎncă nu există evaluări
- Survivejs Webpack Apprentice MasterDocument380 paginiSurvivejs Webpack Apprentice MasterCesar LopezÎncă nu există evaluări
- Test Levels PDFDocument19 paginiTest Levels PDFpkÎncă nu există evaluări
- S-CAR (Observations Corrective Action) - BBS 15 January 2020Document8 paginiS-CAR (Observations Corrective Action) - BBS 15 January 2020Doo PLTGUÎncă nu există evaluări
- Vyos PDFDocument285 paginiVyos PDFdondegÎncă nu există evaluări
- Presentation HowTo GuideDocument71 paginiPresentation HowTo GuideFred EneaÎncă nu există evaluări
- GoogleHackingCheatSheet PDFDocument1 paginăGoogleHackingCheatSheet PDFTashee DukÎncă nu există evaluări
- Tutorial Glass EyeDocument186 paginiTutorial Glass EyeGheorghe IoanaÎncă nu există evaluări
- Paperport 12Document50 paginiPaperport 12Dwayne Bob LerionÎncă nu există evaluări
- Flexible License - 1. Server Installation and ActivationDocument4 paginiFlexible License - 1. Server Installation and ActivationfcoipmÎncă nu există evaluări
- TriangleDocument2 paginiTriangleapi-3812198Încă nu există evaluări
- Examen de Tema de ProporcionalidadDocument2 paginiExamen de Tema de ProporcionalidadDulce CastroÎncă nu există evaluări
- PLSQL 4 3 Practice RodrigoDocument2 paginiPLSQL 4 3 Practice RodrigoRodrigoRojasHuertaÎncă nu există evaluări
- TSR Hall Ticket NptelDocument1 paginăTSR Hall Ticket NptelIndrani KotamrajuÎncă nu există evaluări
- List of Approved Calculators.Document2 paginiList of Approved Calculators.re_123Încă nu există evaluări
- Truss ExampleDocument8 paginiTruss Exampledixn__Încă nu există evaluări
- X X Z N N: Interval EstimateDocument10 paginiX X Z N N: Interval EstimateNa'Tashia Nicole HendersonÎncă nu există evaluări
- Cirrus Logic Interview TopicsDocument3 paginiCirrus Logic Interview TopicsGopi SundaresanÎncă nu există evaluări
- PorjDocument4 paginiPorjTaimenTaiÎncă nu există evaluări
- Artificial Intelligence (AI) ExplainedDocument8 paginiArtificial Intelligence (AI) ExplainedPīyush SīnghÎncă nu există evaluări
- DICOM Printer Driver User ManualDocument13 paginiDICOM Printer Driver User ManualMuhamad RudiansyahÎncă nu există evaluări
- DSP Group ProjectDocument2 paginiDSP Group ProjectMuhammad LuqmanÎncă nu există evaluări
- Salesforce Certified Platform Developer I: Certification Exam GuideDocument14 paginiSalesforce Certified Platform Developer I: Certification Exam GuidejuaniruegasÎncă nu există evaluări
- What Did Sundar Pichai Do To CEO of Google - QuoraDocument6 paginiWhat Did Sundar Pichai Do To CEO of Google - QuoradadangkoeÎncă nu există evaluări
- Comprehensive Workflow For Autosar Classic and Adaptive Using Model Based DesignDocument45 paginiComprehensive Workflow For Autosar Classic and Adaptive Using Model Based DesignSAMEER VISHNU KUMTHEKARÎncă nu există evaluări
- RevitWorks Outlets & Switches SpecificationsDocument6 paginiRevitWorks Outlets & Switches Specificationsbibiana8593Încă nu există evaluări
- Cisco Ipv6 TransitionDocument34 paginiCisco Ipv6 TransitionDuong PhamÎncă nu există evaluări
- Zimbra Admin PlusDocument2 paginiZimbra Admin PlusAnonymous k2SY4zdI3Încă nu există evaluări