S-ar putea să vă placă și
- LabVIEW Core 3 2013 - Course ManualDocument135 paginiLabVIEW Core 3 2013 - Course Manualtalaindio100% (2)
- A Moving Average Trading SystemDocument4 paginiA Moving Average Trading SystemPratik ChhedaÎncă nu există evaluări
- Empowerment Technologies Q3 M13Document16 paginiEmpowerment Technologies Q3 M13Joanne Marielle Veloria100% (1)
- Transforming The Energy Industry With AIDocument18 paginiTransforming The Energy Industry With AIPiero RaurauÎncă nu există evaluări
- Nonlinear Least Squares Theory - Lecture NotesDocument33 paginiNonlinear Least Squares Theory - Lecture NotesAnonymous tsTtieMHDÎncă nu există evaluări
- Hasbun PosterDocument21 paginiHasbun PosterSuhailUmarÎncă nu există evaluări
- Z SAP - All Modules - Only For Your Personal Use PLZ - Not To Be SharedDocument47 paginiZ SAP - All Modules - Only For Your Personal Use PLZ - Not To Be SharedKushal VarshneyÎncă nu există evaluări
- SoftFRAC Matlab Library For RealizationDocument10 paginiSoftFRAC Matlab Library For RealizationKotadai Le ZKÎncă nu există evaluări
- 1 s2.0 S0895717710001743 MainDocument7 pagini1 s2.0 S0895717710001743 MainAhmad DiabÎncă nu există evaluări
- Assignment 5: E1 244 - Detection and Estimation Theory (Jan 2023) Due Date: April 02, 2023 Total Marks: 55Document2 paginiAssignment 5: E1 244 - Detection and Estimation Theory (Jan 2023) Due Date: April 02, 2023 Total Marks: 55samyak jainÎncă nu există evaluări
- Time Series Analysis and Applications: Homework Please Return (In PDF File) by May 24, 2020Document2 paginiTime Series Analysis and Applications: Homework Please Return (In PDF File) by May 24, 2020roussisd74944Încă nu există evaluări
- Sol Mock ExamDocument10 paginiSol Mock ExamAinur LatipovÎncă nu există evaluări
- Finite DifferenceDocument9 paginiFinite DifferenceSiddra KhawarÎncă nu există evaluări
- Practice MidtermDocument8 paginiPractice MidtermOlabiyi RidwanÎncă nu există evaluări
- Template Chaos CircuitDocument14 paginiTemplate Chaos CircuitEnrique PriceÎncă nu există evaluări
- 2007 PepDocument4 pagini2007 PepWayne YangÎncă nu există evaluări
- Quiz 1: 2.29 Numerical Fluid Mechanics - Fall 2009Document4 paginiQuiz 1: 2.29 Numerical Fluid Mechanics - Fall 2009gokuler137Încă nu există evaluări
- Assignment 4Document3 paginiAssignment 4Vishna PanyalaÎncă nu există evaluări
- Problem SetDocument4 paginiProblem SetAnderson DoidoÎncă nu există evaluări
- Practice Questions Set: Numerical Methods: t x i j ij i j πx δx iDocument3 paginiPractice Questions Set: Numerical Methods: t x i j ij i j πx δx iBishnu LamichhaneÎncă nu există evaluări
- The Foam Drainage Equation With Time-And Space-Fractional Derivatives Solved by The Adomian MethodDocument10 paginiThe Foam Drainage Equation With Time-And Space-Fractional Derivatives Solved by The Adomian MethodLuis FuentesÎncă nu există evaluări
- E ≡ 1 f x x aj (x) ∆ wj=η f x x aj (x) η: x∈ D x∈DDocument2 paginiE ≡ 1 f x x aj (x) ∆ wj=η f x x aj (x) η: x∈ D x∈DTameemuddinÎncă nu există evaluări
- Selected ProblemsDocument11 paginiSelected Problemsasanithanair35Încă nu există evaluări
- MATH3161/MATH5165 Optimization: The University of New South Wales School of JviathematicsDocument4 paginiMATH3161/MATH5165 Optimization: The University of New South Wales School of JviathematicsWayne YangÎncă nu există evaluări
- Homework 1Document3 paginiHomework 1wise1smileÎncă nu există evaluări
- mb135 4 5Document10 paginimb135 4 5edo hangukoÎncă nu există evaluări
- Chapter 2 Numerical Methods For Stiff Ordinary Differential EquationsDocument21 paginiChapter 2 Numerical Methods For Stiff Ordinary Differential EquationsRamoni Z. S. AzevedoÎncă nu există evaluări
- CS 229, Public Course Problem Set #4: Unsupervised Learning and Re-Inforcement LearningDocument5 paginiCS 229, Public Course Problem Set #4: Unsupervised Learning and Re-Inforcement Learningsuhar adiÎncă nu există evaluări
- TT XXDocument5 paginiTT XXAsees SachdevÎncă nu există evaluări
- SLAM of Multi-Robot System Considering Its Network Topology: H. W. Dong, Z. W. LuoDocument2 paginiSLAM of Multi-Robot System Considering Its Network Topology: H. W. Dong, Z. W. LuopaperopenaccessÎncă nu există evaluări
- Assignment 2Document3 paginiAssignment 2phatctÎncă nu există evaluări
- Field Exam - ControlsDocument1 paginăField Exam - ControlsVigneshRamakrishnanÎncă nu există evaluări
- Exercises Part 2Document3 paginiExercises Part 2mileknzÎncă nu există evaluări
- Symmetry: Extended Convergence Analysis of The Newton-Hermitian and Skew-Hermitian Splitting MethodDocument15 paginiSymmetry: Extended Convergence Analysis of The Newton-Hermitian and Skew-Hermitian Splitting MethodAlberto Magreñán RuizÎncă nu există evaluări
- Finite Differences Partial Differential EquationsDocument15 paginiFinite Differences Partial Differential EquationsJuanCarlos Arias SantanaÎncă nu există evaluări
- Ex Lecture1Document2 paginiEx Lecture1AlÎncă nu există evaluări
- ECM3711 - Nonlinear Systems and Control: M¨ δ P − D ˙δ − η E τ ˙ E EDocument1 paginăECM3711 - Nonlinear Systems and Control: M¨ δ P − D ˙δ − η E τ ˙ E EMuhammad Sohaib ShahidÎncă nu există evaluări
- Machine Learning For Quantitative Finance: Fast Derivative Pricing, Hedging and FittingDocument15 paginiMachine Learning For Quantitative Finance: Fast Derivative Pricing, Hedging and FittingJ Martin O.Încă nu există evaluări
- 2018 enDocument9 pagini2018 enMohammad Almoghabat AlmÎncă nu există evaluări
- DownloadDocument7 paginiDownloadnootsamÎncă nu există evaluări
- MATH3161/MATH5165 Optimization: The University of New South Wales School of Mathematics and StatisticsDocument4 paginiMATH3161/MATH5165 Optimization: The University of New South Wales School of Mathematics and StatisticsBobÎncă nu există evaluări
- Costate Prediction Based Optimal Control For Non-Linear Hybrid SystemsDocument6 paginiCostate Prediction Based Optimal Control For Non-Linear Hybrid Systemsapi-19660864Încă nu există evaluări
- Assignment#01. CalculusDocument3 paginiAssignment#01. CalculusAbdul Rehman AkmalÎncă nu există evaluări
- Crank Nicolson Type Method With Moving Mesh For Burgers EquationDocument8 paginiCrank Nicolson Type Method With Moving Mesh For Burgers EquationD.n.PrasadÎncă nu există evaluări
- Numerical Optimization: Unit 9: Penalty Method and Interior Point Method Unit 10: Filter Method and The Maratos EffectDocument24 paginiNumerical Optimization: Unit 9: Penalty Method and Interior Point Method Unit 10: Filter Method and The Maratos EffectkahvumidragaispeciÎncă nu există evaluări
- 2016.proceedings Cmmse 2Document4 pagini2016.proceedings Cmmse 2JE Macias-DiazÎncă nu există evaluări
- Analytic Approximation of Solutions of Parabolic Partial Differential Equations With Variable CoefficientsDocument8 paginiAnalytic Approximation of Solutions of Parabolic Partial Differential Equations With Variable CoefficientsHector Grover GÎncă nu există evaluări
- Mpc12 ExamDocument8 paginiMpc12 Examamir12345678Încă nu există evaluări
- On Integral Control in Backstepping: Analysis of Different TechniquesDocument6 paginiOn Integral Control in Backstepping: Analysis of Different TechniqueslimakmÎncă nu există evaluări
- Gauss-Seidel Iteration Method For Poisson EquationDocument22 paginiGauss-Seidel Iteration Method For Poisson EquationMohamed AbdelRazekÎncă nu există evaluări
- B.TECH All 1st SEMDocument3 paginiB.TECH All 1st SEMumesh.developer498Încă nu există evaluări
- Nov Dec 2013Document4 paginiNov Dec 2013ABC CheckÎncă nu există evaluări
- Exfall2021 With SolutionsDocument8 paginiExfall2021 With SolutionsJulius DesertusÎncă nu există evaluări
- A Parallel Algorithm For Constrained Optimization ProblemsDocument6 paginiA Parallel Algorithm For Constrained Optimization Problemssami_aldalahmehÎncă nu există evaluări
- Set A DMDocument2 paginiSet A DMNeeraj BaishwarÎncă nu există evaluări
- Power Load Forecasting Based On Multi Task Gaussia - 2014 - IFAC Proceedings VolDocument6 paginiPower Load Forecasting Based On Multi Task Gaussia - 2014 - IFAC Proceedings VolKhalid AlHashemiÎncă nu există evaluări
- Exercise ProblemsDocument2 paginiExercise ProblemshariÎncă nu există evaluări
- A5405-Digital Control SystemsDocument2 paginiA5405-Digital Control Systemshari0118Încă nu există evaluări
- Numerical Integration in Structural Dynamics: Duke UniversityDocument14 paginiNumerical Integration in Structural Dynamics: Duke UniversityWael Fawzy MohamedÎncă nu există evaluări
- Ee 5307 HomeworksDocument15 paginiEe 5307 HomeworksManoj KumarÎncă nu există evaluări
- Power Load Forecasting Based On Multi-Task Gaussian ProcessDocument6 paginiPower Load Forecasting Based On Multi-Task Gaussian ProcessKhalid AlHashemiÎncă nu există evaluări
- Ass 1Document3 paginiAss 1Vibhanshu LodhiÎncă nu există evaluări
- ArimaDocument4 paginiArimaSofia LivelyÎncă nu există evaluări
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)De la EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Încă nu există evaluări
- Issue Boarding PassDocument2 paginiIssue Boarding PassPiero RaurauÎncă nu există evaluări
- BecasCorea2020 ConvocatoriaDocument2 paginiBecasCorea2020 ConvocatoriaPiero RaurauÎncă nu există evaluări
- Ijrr99jour PDFDocument10 paginiIjrr99jour PDFPiero RaurauÎncă nu există evaluări
- Data Weighting Explained (PGK, 10-01-03)Document3 paginiData Weighting Explained (PGK, 10-01-03)Piero RaurauÎncă nu există evaluări
- MultiTek - App Note - Analysis of Sulfur in Diesel Engine FuelDocument4 paginiMultiTek - App Note - Analysis of Sulfur in Diesel Engine FuelPiero RaurauÎncă nu există evaluări
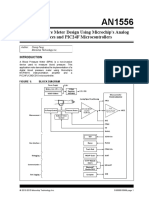
- 00001556B PDFDocument12 pagini00001556B PDFPiero Raurau100% (1)
- Optimization of PID Control For High Speed Line Tracking RobotsDocument8 paginiOptimization of PID Control For High Speed Line Tracking RobotsPiero RaurauÎncă nu există evaluări
- DS - Unit 5 - NotesDocument8 paginiDS - Unit 5 - NotesManikyarajuÎncă nu există evaluări
- Current ConveyorDocument7 paginiCurrent ConveyorAvinash SinghÎncă nu există evaluări
- Framework of E-Government Technical Infrastructure. Case of EstoniaDocument5 paginiFramework of E-Government Technical Infrastructure. Case of EstoniaSonia AraujoÎncă nu există evaluări
- Internet of Things (IOT) : Technology and Applications: Dr. Mazlan Abbas MIMOS BerhadDocument54 paginiInternet of Things (IOT) : Technology and Applications: Dr. Mazlan Abbas MIMOS BerhadmeenakshiÎncă nu există evaluări
- Micro-Teach Lesson Plan - Scratch JuniorDocument5 paginiMicro-Teach Lesson Plan - Scratch Juniorapi-514024162Încă nu există evaluări
- ANSYS Fluent Migration Manual 16.0Document38 paginiANSYS Fluent Migration Manual 16.0hafidzfbÎncă nu există evaluări
- Ch02 1 Decision Modelling With Excel Part One Ver2 0506Document4 paginiCh02 1 Decision Modelling With Excel Part One Ver2 0506Jai GaizinÎncă nu există evaluări
- Dog Breed Classificationusing Convolutional Neural NetworkDocument54 paginiDog Breed Classificationusing Convolutional Neural NetworkLike meshÎncă nu există evaluări
- Readingandwritingskills q4 m4 Hypertextandintertext v2Document28 paginiReadingandwritingskills q4 m4 Hypertextandintertext v2Rachelle AbalosÎncă nu există evaluări
- Fares TicketingDocument41 paginiFares TicketingKhanjiFarm100% (1)
- CEG - Sample Logging Quick ReferenceDocument5 paginiCEG - Sample Logging Quick ReferenceAdolphÎncă nu există evaluări
- Verilog A Model To CadenceDocument56 paginiVerilog A Model To CadenceJamesÎncă nu există evaluări
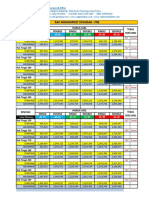
- Rak Minimarket Standar - P90: Single Double Single Double Single Double Rincian Harga Jual Tebal ShelvingDocument6 paginiRak Minimarket Standar - P90: Single Double Single Double Single Double Rincian Harga Jual Tebal ShelvingAndi HadisaputraÎncă nu există evaluări
- Arch Linux Handbook A Simple Lightweight Linux Handbook: Read/DownloadDocument3 paginiArch Linux Handbook A Simple Lightweight Linux Handbook: Read/Downloadnurcholis majidÎncă nu există evaluări
- Windows 10 All in One RS6 1903 May 2019Document9 paginiWindows 10 All in One RS6 1903 May 2019HardcorekidÎncă nu există evaluări
- Univ Industrial ManualDocument68 paginiUniv Industrial ManualVipan SharmaÎncă nu există evaluări
- Introduction To Cloud ComputingDocument3 paginiIntroduction To Cloud ComputingfaceÎncă nu există evaluări
- CS1303 Theory of Computation Question AloneDocument7 paginiCS1303 Theory of Computation Question AlonesridharanchandranÎncă nu există evaluări
- FLT 2007 CatalogDocument72 paginiFLT 2007 CatalogjobandoÎncă nu există evaluări
- On Prem Slution Update SpecDocument3 paginiOn Prem Slution Update SpecĐức Đoàn ViệtÎncă nu există evaluări
- Sistem MultimediaDocument44 paginiSistem MultimediapandiaÎncă nu există evaluări
- Shah & Anchor Kutchhi Engineering College, UG Program in Information TechnologyDocument9 paginiShah & Anchor Kutchhi Engineering College, UG Program in Information TechnologyNirmal NemadeÎncă nu există evaluări
- Dalvik Opcodes JavaDocument21 paginiDalvik Opcodes JavaYee CameliaÎncă nu există evaluări
- Eradist and Eranataf Classes: Documentation and ExamplesDocument12 paginiEradist and Eranataf Classes: Documentation and ExamplesJoshua SÎncă nu există evaluări
- 6.189 Lecture11 CompilersDocument68 pagini6.189 Lecture11 Compilersarima_ram92Încă nu există evaluări
- CNS-223-1I Implement Citrix ADC 13.x: Getting Started Lab ManualDocument24 paginiCNS-223-1I Implement Citrix ADC 13.x: Getting Started Lab ManualМаријан СтанићÎncă nu există evaluări