S-ar putea să vă placă și
- TD FlambementDocument6 paginiTD FlambementTOVIHO SessinouÎncă nu există evaluări
- Fonctions de Singularite - Methodes de Calculs PDFDocument4 paginiFonctions de Singularite - Methodes de Calculs PDFAhmed Aben50% (2)
- Chapitre 3 Caracteristiques Geometriques Des Sections-1Document29 paginiChapitre 3 Caracteristiques Geometriques Des Sections-1youbi aurelÎncă nu există evaluări
- RDM-Chapitre 2Document19 paginiRDM-Chapitre 2GOUAL SaraÎncă nu există evaluări
- MMC Chapitre 1 DeformationDocument24 paginiMMC Chapitre 1 Deformationkassaui mohamed100% (1)
- Exercice Corrige de Béton Armé BâtimentDocument5 paginiExercice Corrige de Béton Armé BâtimentMuhammad Nabil AladeÎncă nu există evaluări
- 1 Corrige Questions de CoursDocument1 pagină1 Corrige Questions de Courszoela thrÎncă nu există evaluări
- Série D'exercices 2 Elasticité Analyse de ContraintesDocument3 paginiSérie D'exercices 2 Elasticité Analyse de ContraintesS.Der100% (1)
- Examen RDM-GC-2020 Avec CorrectionDocument3 paginiExamen RDM-GC-2020 Avec CorrectionBahaa Al haytham100% (1)
- Chapitre 3 Méthode Des Travaux Virtuels Pour La Détermination Des Charges LimitesDocument7 paginiChapitre 3 Méthode Des Travaux Virtuels Pour La Détermination Des Charges LimitesAmineLospiratasÎncă nu există evaluări
- Exercices Divers RDM1Document3 paginiExercices Divers RDM1SàLàh RhànnouriÎncă nu există evaluări
- Série D'exercices - Caractéristiques Géométriques Des Sections PDFDocument4 paginiSérie D'exercices - Caractéristiques Géométriques Des Sections PDFMohamed BOUCHAHLATA100% (1)
- SerieDocument2 paginiSerieAbderrahim BoulanouarÎncă nu există evaluări
- Chapitre 3Document15 paginiChapitre 3Choayb Belghiat0% (1)
- Correction RDMDocument14 paginiCorrection RDMAhmed RachdiÎncă nu există evaluări
- TD MDS L2 2016Document4 paginiTD MDS L2 2016Houcine Cool100% (1)
- Chap2 Poutre ContinueDocument23 paginiChap2 Poutre ContinueEden St CyrÎncă nu există evaluări
- CRC Génie CivilDocument3 paginiCRC Génie CivilRoumayssae NAIT BELLAÎncă nu există evaluări
- Cet TD Flexion Composée-Déviée PDFDocument44 paginiCet TD Flexion Composée-Déviée PDFRym KrÎncă nu există evaluări
- TD 4 CorrectionDocument3 paginiTD 4 CorrectionAmm KenÎncă nu există evaluări
- Chapitre 2-HydrauliqueDocument73 paginiChapitre 2-HydrauliqueHmida NesrineÎncă nu există evaluări
- Ds Topographie 1GC Iset Nabeul 2013Document2 paginiDs Topographie 1GC Iset Nabeul 2013Soulaima SeddikiÎncă nu există evaluări
- MDC2018 PDFDocument9 paginiMDC2018 PDFDoll MiraÎncă nu există evaluări
- ExercicesRevisionCH1 2Document3 paginiExercicesRevisionCH1 2John Rodriguez Dominguez0% (1)
- Exercices Stabilité Des PentesDocument3 paginiExercices Stabilité Des PentesAlec WalkerÎncă nu există evaluări
- Mfcec BKDocument82 paginiMfcec BKZahirÎncă nu există evaluări
- Chapitre IIDocument72 paginiChapitre IIHamza HalhouliÎncă nu există evaluări
- Chapitre6 La Flexion SimpleDocument15 paginiChapitre6 La Flexion SimpleAyou HamÎncă nu există evaluări
- Produit D'inertie Axes PrincipauxDocument4 paginiProduit D'inertie Axes PrincipauxMhd OuakÎncă nu există evaluări
- TD1 TopographieDocument6 paginiTD1 TopographieFernaneÎncă nu există evaluări
- Cours Béton Armé 1Document42 paginiCours Béton Armé 1Măđjįď MăđjįďÎncă nu există evaluări
- Etude de La Reaction D'un Jet D'eauDocument7 paginiEtude de La Reaction D'un Jet D'eauAnass BaallaouiÎncă nu există evaluări
- 07 Poutres en Flexion SimpleDocument20 pagini07 Poutres en Flexion SimpleAbdelhak GuettiÎncă nu există evaluări
- Receuil Des Exercices MDS Kissi PDFDocument8 paginiReceuil Des Exercices MDS Kissi PDFassia maziÎncă nu există evaluări
- Corrigé-Examen BA2-2014 PDFDocument4 paginiCorrigé-Examen BA2-2014 PDFRAHMA ABDELLIÎncă nu există evaluări
- M07-Connaissance de La Mecanique Theorique RDM BTP-TSCTDocument48 paginiM07-Connaissance de La Mecanique Theorique RDM BTP-TSCTDon Yassine100% (2)
- CH 3 Poteaux Et VoilesDocument13 paginiCH 3 Poteaux Et VoilesMoussa Hajjaji100% (1)
- TP 2 FlexionDocument9 paginiTP 2 FlexionBouallegue MounirÎncă nu există evaluări
- TD FlexionSimpleDocument8 paginiTD FlexionSimpleIsmail TiGuintÎncă nu există evaluări
- 05 - Fondations Profondes - SolutionnaireDocument4 pagini05 - Fondations Profondes - SolutionnaireAziz IkhlefÎncă nu există evaluări
- Cours PousséeDocument15 paginiCours PousséeSohirSohir50% (2)
- RDMDocument2 paginiRDMYoussef EL MliliÎncă nu există evaluări
- Les Structures Hyperstatqiues 2Document8 paginiLes Structures Hyperstatqiues 2rania rouabahÎncă nu există evaluări
- TD N°4 Flexion ComposéeDocument8 paginiTD N°4 Flexion Composéeabdellah karkaÎncă nu există evaluări
- Flambement 1Document14 paginiFlambement 1Leo Fabiola NGHAPÎncă nu există evaluări
- ADocument24 paginiALemallemÎncă nu există evaluări
- Sollicitation CompDocument6 paginiSollicitation CompALAKOUKOÎncă nu există evaluări
- TD3 Modifi2 2020-2021Document4 paginiTD3 Modifi2 2020-2021Rayen Sell AmiÎncă nu există evaluări
- T.P LABO Formation G15Document67 paginiT.P LABO Formation G15Joshua NdiayeÎncă nu există evaluări
- Série de TD N°7Document4 paginiSérie de TD N°7Hunt MarkÎncă nu există evaluări
- Rapport RDM TP2 PDFDocument17 paginiRapport RDM TP2 PDFHanene OuazzaneÎncă nu există evaluări
- PS P&C Enis GC2 2021-22Document5 paginiPS P&C Enis GC2 2021-22elleuch sourourÎncă nu există evaluări
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysDe la EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysÎncă nu există evaluări
- Des risques, des mines et des hommes: La perception du risque chez les mineurs de fond de l'Abitibi-TémiscamingueDe la EverandDes risques, des mines et des hommes: La perception du risque chez les mineurs de fond de l'Abitibi-TémiscamingueÎncă nu există evaluări
- L' Ingénieur et le développement durableDe la EverandL' Ingénieur et le développement durableEvaluare: 2 din 5 stele2/5 (1)
- Mathématiques Pour La Physique (Ujf)Document279 paginiMathématiques Pour La Physique (Ujf)Scribd Reader100% (3)
- CoursDocument99 paginiCoursimed imddÎncă nu există evaluări
- Chap 0Document14 paginiChap 0abouharyaÎncă nu există evaluări
- RDMDocument87 paginiRDMWissem Ben YahiaÎncă nu există evaluări
- Cours Stat2015Document127 paginiCours Stat2015imed imdd100% (1)
- Install Rdm6Document2 paginiInstall Rdm6Mimi Seguini100% (1)
- Analyse Numerique PDFDocument84 paginiAnalyse Numerique PDFimed imddÎncă nu există evaluări
- Ponts 1945 2012Document24 paginiPonts 1945 2012Cheraiti Abdelmoumene100% (1)
- Phys TatDocument128 paginiPhys TatAliOucharÎncă nu există evaluări
- InformatiqueDocument26 paginiInformatiqueimed imddÎncă nu există evaluări
- IUTTLSR Mecanique-Des-Structures 2009 GC PDFDocument1 paginăIUTTLSR Mecanique-Des-Structures 2009 GC PDFimed imddÎncă nu există evaluări
- TP Seance6Document1 paginăTP Seance6FouadHbÎncă nu există evaluări
- Turb TDDocument16 paginiTurb TDimed imdd0% (1)
- Emd 1 Gcivil Fev2010 SolutionfiniDocument3 paginiEmd 1 Gcivil Fev2010 Solutionfiniimed imddÎncă nu există evaluări
- Cours CDocument29 paginiCours Cimed imdd100% (1)
- Chap 0Document14 paginiChap 0abouharyaÎncă nu există evaluări
- TD2Document2 paginiTD2imed imddÎncă nu există evaluări
- TPINFODocument53 paginiTPINFOAmine Boubakeur0% (1)
- Travaux Dirigees de Resistance Des Materiaux Corrige PDFDocument71 paginiTravaux Dirigees de Resistance Des Materiaux Corrige PDFGenie MecaÎncă nu există evaluări
- Listes Chainees DynamiquesDocument50 paginiListes Chainees Dynamiquesimed imddÎncă nu există evaluări
- TP 2 SolDocument10 paginiTP 2 Solimed imddÎncă nu există evaluări
- Algorithm I Que 4Document27 paginiAlgorithm I Que 4chimbwaÎncă nu există evaluări
- 4a SDPDocument66 pagini4a SDPimed imddÎncă nu există evaluări
- Tp2sol PDFDocument10 paginiTp2sol PDFimed imddÎncă nu există evaluări
- Langage C Notions FondamentalesDocument29 paginiLangage C Notions FondamentalesnaovichÎncă nu există evaluări
- MMC GeneralDocument105 paginiMMC Generalimed imdd100% (1)
- TP Seance6Document1 paginăTP Seance6FouadHbÎncă nu există evaluări
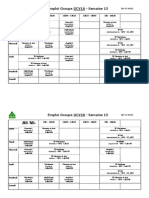
- emploiGCV - Semaine11Document7 paginiemploiGCV - Semaine11imed imddÎncă nu există evaluări
- Emploi GCV2Document7 paginiEmploi GCV2imed imddÎncă nu există evaluări
- Polycopi CoursdanalyseIDocument115 paginiPolycopi CoursdanalyseIPresli KprtinoÎncă nu există evaluări
- RecurDocument2 paginiRecurIhsan MokhlisseÎncă nu există evaluări
- Al7ma02tepa0213 Sequence 06Document48 paginiAl7ma02tepa0213 Sequence 06Ch SirajÎncă nu există evaluări
- 3 Mca TSTPDocument14 pagini3 Mca TSTPMohsen SaidiÎncă nu există evaluări
- BTI-012 Alimentation Souterraine C2010Document21 paginiBTI-012 Alimentation Souterraine C2010Joshua OneillÎncă nu există evaluări
- Matériaux TropicauxDocument63 paginiMatériaux TropicauxAbdoulnassirou Bassongou100% (3)
- Son TilaDocument51 paginiSon TilaYacoudimaÎncă nu există evaluări
- Cc1-3 S1 1ér Année Collège FR CCCCCCCCCCCCCCCom)Document2 paginiCc1-3 S1 1ér Année Collège FR CCCCCCCCCCCCCCCom)عبدالرزاق أفرياضÎncă nu există evaluări
- Les EmulsionsDocument10 paginiLes Emulsionsshinichi62kudoÎncă nu există evaluări
- M D S (TP5)Document5 paginiM D S (TP5)aida arÎncă nu există evaluări
- THGR 2016 Td2 CorrigeDocument3 paginiTHGR 2016 Td2 Corrigebouhrara faroukÎncă nu există evaluări
- Presentation de L Analyse Frequentielle 2008 PDFDocument6 paginiPresentation de L Analyse Frequentielle 2008 PDFMustafa Moussaoui100% (1)
- Mathématiques: Classe: Bac Maths (Top 50)Document5 paginiMathématiques: Classe: Bac Maths (Top 50)Youssef FarjallahÎncă nu există evaluări
- Série TD Evaporation Master GCDocument2 paginiSérie TD Evaporation Master GCNihed Samson75% (4)
- Restitution Des Connaissances (10 Points) : Outil RôleDocument3 paginiRestitution Des Connaissances (10 Points) : Outil RôleGhizlane GhizlaneÎncă nu există evaluări
- Cellule Solaire Module SolaireDocument18 paginiCellule Solaire Module SolaireKesraoui HichemÎncă nu există evaluări
- Coloration de Graphe PDFDocument2 paginiColoration de Graphe PDFKarenÎncă nu există evaluări
- Cours de Calcul StochastiqueDocument13 paginiCours de Calcul StochastiquetariktarikovÎncă nu există evaluări
- Robert Linssen - Science Et Spiritualité Entretien 1986Document8 paginiRobert Linssen - Science Et Spiritualité Entretien 1986helabzÎncă nu există evaluări
- Cours AcoustiqueDocument37 paginiCours Acoustiqueghaghalee100% (1)
- Cours CinematiqueDocument19 paginiCours Cinematiqueoussama22Încă nu există evaluări
- Isométrie 1Document2 paginiIsométrie 1gharsyessmineÎncă nu există evaluări
- Nombres ReelsDocument4 paginiNombres ReelsRima SamaraniÎncă nu există evaluări
- La Durabilité Des Ouvrages en Béton ArméDocument105 paginiLa Durabilité Des Ouvrages en Béton ArméKerby Pierre LouisÎncă nu există evaluări
- Effet Kirlian... - Afis - Association Française Pour L'information ScientifiqueDocument8 paginiEffet Kirlian... - Afis - Association Française Pour L'information Scientifiquebenben31100% (1)
- RandriantsihetySolofomaheryB ESPA ING 14Document174 paginiRandriantsihetySolofomaheryB ESPA ING 14Mounir KermoussÎncă nu există evaluări
- Pompe A ChaleurDocument8 paginiPompe A ChaleurZak Keroum100% (1)
- 1616054016bosch Rexroth 4ws e 2e Valvola Valve rf29583Document20 pagini1616054016bosch Rexroth 4ws e 2e Valvola Valve rf29583guevbaÎncă nu există evaluări
- Biochimie CliniqueDocument37 paginiBiochimie CliniqueMACON824100% (1)
- Cour de Chimie en SolutionDocument20 paginiCour de Chimie en SolutionIhsan Mokhlisse100% (28)