S-ar putea să vă placă și
- Drone ReportDocument19 paginiDrone ReportChandan LawrenceÎncă nu există evaluări
- Proposal For Drone ResearchDocument5 paginiProposal For Drone ResearchRichard Myo ThantÎncă nu există evaluări
- Minor ProjectDocument24 paginiMinor ProjectSanjay BishtÎncă nu există evaluări
- DRONES UpdatedDocument13 paginiDRONES UpdatedAkarshit PachyalaÎncă nu există evaluări
- Design & Fabrication of Crop Spray DroneDocument57 paginiDesign & Fabrication of Crop Spray DroneFatima Nasir R:29Încă nu există evaluări
- A Review On Deep Learning ApplicationsDocument11 paginiA Review On Deep Learning ApplicationsDr.Chitra DhawaleÎncă nu există evaluări
- Wireless Control QuadcopterDocument54 paginiWireless Control QuadcopterKishore SinghÎncă nu există evaluări
- Quad Copter PresentationDocument19 paginiQuad Copter Presentationjunaid 786Încă nu există evaluări
- DRONES UpdatedDocument13 paginiDRONES UpdatedAkarshit PachyalaÎncă nu există evaluări
- Wireless Control Quadcopter With Stereo Camera: P.Manoj, S.GokulakannanDocument24 paginiWireless Control Quadcopter With Stereo Camera: P.Manoj, S.GokulakannanManojÎncă nu există evaluări
- Icao Safety RpasDocument15 paginiIcao Safety RpasJuan C. MoñinoÎncă nu există evaluări
- Drone ProjectDocument22 paginiDrone ProjectPRABHAKAR JAISWALÎncă nu există evaluări
- Obstacles Detection2Document10 paginiObstacles Detection2Rahul SawantÎncă nu există evaluări
- FPV Quadcopter Acronyms, Terminology, Glossary - Oscar LiangDocument17 paginiFPV Quadcopter Acronyms, Terminology, Glossary - Oscar Lianggumimacithj100% (1)
- Drone Final ProjectDocument6 paginiDrone Final Projectapi-383760519100% (1)
- Object Detection in UAVsDocument6 paginiObject Detection in UAVsEditor IJTSRDÎncă nu există evaluări
- DRS Pixhawk 2 17th March 2016Document29 paginiDRS Pixhawk 2 17th March 2016Nguyen Trong NghiaÎncă nu există evaluări
- Quick Start Guide: Learn How To Use Your New Dji Phantom 4 Pro Drone With Dronedeploy Mapping SoftwareDocument16 paginiQuick Start Guide: Learn How To Use Your New Dji Phantom 4 Pro Drone With Dronedeploy Mapping SoftwareambonianÎncă nu există evaluări
- A Research Proposal Aerodynamic Design and Analysis of Medical Delivery DroneDocument5 paginiA Research Proposal Aerodynamic Design and Analysis of Medical Delivery DroneKamal Darlami100% (1)
- UNMANNED AERIAL VEHICLEpptDocument25 paginiUNMANNED AERIAL VEHICLEpptAbhishek BahmaniÎncă nu există evaluări
- Conceptual Design of An Unmanned Aerial VehicleDocument47 paginiConceptual Design of An Unmanned Aerial VehicleTarik Hassan ElsonniÎncă nu există evaluări
- A Practical Animal Detection and Collision Avoidance System Using Computer Vision TechniqueDocument7 paginiA Practical Animal Detection and Collision Avoidance System Using Computer Vision Techniquekeerthipati vinaykumarÎncă nu există evaluări
- Flying Training Circular PDFDocument33 paginiFlying Training Circular PDFshariqÎncă nu există evaluări
- Unmanned Ground Vehicle Project ReportDocument187 paginiUnmanned Ground Vehicle Project ReportAdil Ahsan0% (2)
- Ebee X ENDocument8 paginiEbee X ENomarÎncă nu există evaluări
- Design and Development of UAV For Medical Application - Final Report PDFDocument88 paginiDesign and Development of UAV For Medical Application - Final Report PDFNagendraÎncă nu există evaluări
- DroneDocument13 paginiDronebhavani velineniÎncă nu există evaluări
- DroneDocument6 paginiDroneSYAZWANI HUSNAÎncă nu există evaluări
- Design and Implementation of Pothole Detector Usingmultisensor System PDFDocument5 paginiDesign and Implementation of Pothole Detector Usingmultisensor System PDFChethan GowdaÎncă nu există evaluări
- FPV Cameras For DronesDocument5 paginiFPV Cameras For Dronesnapoleon_velasc3617100% (1)
- Unmanned Aerial VehicleDocument174 paginiUnmanned Aerial VehicleRiyad A. El-laithy100% (2)
- Report On Unmanned Aerial VehicleDocument21 paginiReport On Unmanned Aerial VehicleansÎncă nu există evaluări
- Anatomy of A DroneDocument16 paginiAnatomy of A Dronekieranwood857015100% (1)
- Drone Delivery With Object DetectionDocument53 paginiDrone Delivery With Object Detectionmohan100% (1)
- Introduction To Photogrammetry With UAVDocument107 paginiIntroduction To Photogrammetry With UAVut4ulu100% (1)
- Drone AnatomyDocument3 paginiDrone AnatomycolteapaulÎncă nu există evaluări
- Drone UavDocument20 paginiDrone UavPooja BanÎncă nu există evaluări
- UavDocument31 paginiUavANSHUMANÎncă nu există evaluări
- Simulation of UAV SystemsDocument5 paginiSimulation of UAV SystemsZain Ul AabidinÎncă nu există evaluări
- DroneDocument17 paginiDroneTanzeel KhanÎncă nu există evaluări
- Drone Technology: Presented By: Srihari ReddyDocument18 paginiDrone Technology: Presented By: Srihari ReddySrikanth Reddy100% (1)
- Presentation 1Document23 paginiPresentation 1Praveen KumarÎncă nu există evaluări
- Synopsis DroneDocument5 paginiSynopsis DroneAman Saini0% (1)
- ME4241 - Aircraft Performance and Stability Course Assignment Stability and Control of Quadcopter DronesDocument7 paginiME4241 - Aircraft Performance and Stability Course Assignment Stability and Control of Quadcopter Dronesliuxc000Încă nu există evaluări
- A Mini Unmanned Aerial Vehicle (Uav) : System Overview and Image AcquisitionDocument7 paginiA Mini Unmanned Aerial Vehicle (Uav) : System Overview and Image AcquisitionhougieÎncă nu există evaluări
- BICOPTERDocument22 paginiBICOPTERManideep Ananthula100% (4)
- Ambulance Drone Using Raspberry Pi 3 in Emergency HealthcareDocument4 paginiAmbulance Drone Using Raspberry Pi 3 in Emergency HealthcareAbhishek MishraÎncă nu există evaluări
- Arduino Vs Raspberry PiDocument5 paginiArduino Vs Raspberry PiGebBerheÎncă nu există evaluări
- Drone Regulation of India and Comparison With Other Countries Drone LawsDocument6 paginiDrone Regulation of India and Comparison With Other Countries Drone LawsRachitha S SomashekarÎncă nu există evaluări
- Drone PresentationDocument9 paginiDrone PresentationRaviyanshuÎncă nu există evaluări
- Uav or DronesDocument384 paginiUav or Dronescenkj100% (1)
- Drone For AgricultureDocument6 paginiDrone For AgricultureSaroj GaireÎncă nu există evaluări
- DRONE PPT TTTTTTTTDocument15 paginiDRONE PPT TTTTTTTTPragatiÎncă nu există evaluări
- Drone and Uav'sDocument22 paginiDrone and Uav'sBHARGAVA REDDYÎncă nu există evaluări
- Autonomous Control of Quadcopter UAV PDFDocument56 paginiAutonomous Control of Quadcopter UAV PDFOla Sbihat100% (1)
- Drone ComponentsDocument26 paginiDrone ComponentsRadovan Bačanin86% (7)
- Global Drone Market Projections - AsteriaDocument13 paginiGlobal Drone Market Projections - AsteriaAkankshaÎncă nu există evaluări
- RCMP Drone Privacy Impact AssessmentDocument33 paginiRCMP Drone Privacy Impact AssessmentNational Security Oversight Institute of CanadaÎncă nu există evaluări
- Drone ProjectDocument27 paginiDrone ProjectNirmal Raj BaskaranÎncă nu există evaluări
- 2 BonafideDocument8 pagini2 BonafideDerek ChapmanÎncă nu există evaluări
- Microsoft Access - Use ADO To Execute SQL StatementsDocument18 paginiMicrosoft Access - Use ADO To Execute SQL StatementsjorgemachigueÎncă nu există evaluări
- Adrian - Borbe - CHAPTER 1 5 1Document149 paginiAdrian - Borbe - CHAPTER 1 5 1ecilaborbe2003Încă nu există evaluări
- 1 - 2 - 1 RTSX Message ProcessingDocument67 pagini1 - 2 - 1 RTSX Message ProcessingMichael Omodeyinde Robbin-CokerÎncă nu există evaluări
- How To Use Epals To Find A Collaborative Partner ClassroomDocument90 paginiHow To Use Epals To Find A Collaborative Partner ClassroomRita OatesÎncă nu există evaluări
- High-Definition Multimedia Interface SpecificationDocument51 paginiHigh-Definition Multimedia Interface SpecificationwadrÎncă nu există evaluări
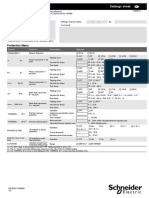
- VIP400 Settings Sheet NRJED311208ENDocument2 paginiVIP400 Settings Sheet NRJED311208ENVăn NguyễnÎncă nu există evaluări
- Questions On LaplaceDocument4 paginiQuestions On LaplaceApam BenjaminÎncă nu există evaluări
- 1746-Pm001a-En-p 1747-BAS Module BASIC Programming ManualDocument144 pagini1746-Pm001a-En-p 1747-BAS Module BASIC Programming ManualjaysonlkhÎncă nu există evaluări
- Simlim Square Computer PricelistDocument4 paginiSimlim Square Computer PricelistBizgram AsiaÎncă nu există evaluări
- Operating Instruction Manual: HFTF-70T Automatic Tilt Thermoforming MachineDocument72 paginiOperating Instruction Manual: HFTF-70T Automatic Tilt Thermoforming MachineAnderson VillamizarÎncă nu există evaluări
- QCA9533Document4 paginiQCA9533BasuragaCirebonÎncă nu există evaluări
- S4hana MorDocument24 paginiS4hana MorARYAN SINHAÎncă nu există evaluări
- SprutCAM 1Document150 paginiSprutCAM 1Galletti DenisÎncă nu există evaluări
- AMDE Brochure-Mine Safety Accountability Integrated SystemDocument1 paginăAMDE Brochure-Mine Safety Accountability Integrated SystemHakimÎncă nu există evaluări
- Determine HWM and Reduce It by Shrink SpaceDocument6 paginiDetermine HWM and Reduce It by Shrink SpaceSiva KumarÎncă nu există evaluări
- JR & Associates ProfileDocument16 paginiJR & Associates ProfileGODFREY JATHOÎncă nu există evaluări
- Ds & Algo: AptitudeDocument5 paginiDs & Algo: Aptitudenitish kumarÎncă nu există evaluări
- PMATH 340 1101 Midterm SolutionsDocument7 paginiPMATH 340 1101 Midterm Solutionsgiselle_rochfordÎncă nu există evaluări
- 840Dsl NCU Base Commiss Man en-US PDFDocument1.342 pagini840Dsl NCU Base Commiss Man en-US PDF류성하Încă nu există evaluări
- Chapter 2 - The Origins of SoftwareDocument26 paginiChapter 2 - The Origins of Softwareلوي وليدÎncă nu există evaluări
- Magnetron Power Supply SpecDocument2 paginiMagnetron Power Supply SpecMeghjit MazumderÎncă nu există evaluări
- ELABO Sensorics FundamentalsDocument44 paginiELABO Sensorics FundamentalsItmi HidayatÎncă nu există evaluări
- Clmd4a Ictg6Document25 paginiClmd4a Ictg6Rose RamosÎncă nu există evaluări
- Atm Error CodesDocument4 paginiAtm Error CodesamarÎncă nu există evaluări
- 03 - LT Ib enDocument42 pagini03 - LT Ib enjmmÎncă nu există evaluări
- What Are You Doing LiveworksheetDocument18 paginiWhat Are You Doing LiveworksheetRizki Novela WatiÎncă nu există evaluări
- Practical 3Document3 paginiPractical 3Naimish SorathiyaÎncă nu există evaluări
- HRS Funding Opportunities BulletinSeptember222017Document24 paginiHRS Funding Opportunities BulletinSeptember222017SyedÎncă nu există evaluări
- SmartArt BasicsDocument16 paginiSmartArt BasicsshaikmanojÎncă nu există evaluări
- EL4024 - 4-Channel Analog Output Terminal 4 20 Ma, 12 BitDocument1 paginăEL4024 - 4-Channel Analog Output Terminal 4 20 Ma, 12 BitDaniela Maldonado VeraÎncă nu există evaluări