S-ar putea să vă placă și
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Cognitive-Behavioral Interventions For PTSDDocument20 paginiCognitive-Behavioral Interventions For PTSDBusyMindsÎncă nu există evaluări
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
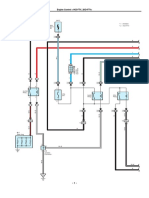
- Diagrama Hilux 1KD-2KD PDFDocument11 paginiDiagrama Hilux 1KD-2KD PDFJeni100% (1)
- Din 48204Document3 paginiDin 48204Thanh Dang100% (4)
- Plantas Con Madre Plants That Teach and PDFDocument15 paginiPlantas Con Madre Plants That Teach and PDFJetÎncă nu există evaluări
- 1207 - RTC-8065 II InglesDocument224 pagini1207 - RTC-8065 II InglesGUILHERME SANTOSÎncă nu există evaluări
- 09 Chapter 3Document100 pagini09 Chapter 3Uma Mageshwari100% (2)
- Arte PoveraDocument13 paginiArte PoveraSohini MaitiÎncă nu există evaluări
- Grade 6 q2 Mathematics LasDocument151 paginiGrade 6 q2 Mathematics LasERIC VALLE80% (5)
- Toyota Innova Crysta 2.4 GX MT Brochure PDFDocument14 paginiToyota Innova Crysta 2.4 GX MT Brochure PDFUma MageshwariÎncă nu există evaluări
- Orthographic Views in Multiview Drawings: Autocad 2015 Tutorial: 2D Fundamentals 5-1Document30 paginiOrthographic Views in Multiview Drawings: Autocad 2015 Tutorial: 2D Fundamentals 5-1Uma MageshwariÎncă nu există evaluări
- AbstractDocument210 paginiAbstractUma MageshwariÎncă nu există evaluări
- RM PDFDocument57 paginiRM PDFUma MageshwariÎncă nu există evaluări
- Geometry of CRBDocument4 paginiGeometry of CRBUma MageshwariÎncă nu există evaluări
- Biological Cybernetics: Prediction of A Moving Target's Position in Fast Goal-Directed ActionDocument10 paginiBiological Cybernetics: Prediction of A Moving Target's Position in Fast Goal-Directed ActionUma MageshwariÎncă nu există evaluări
- MECH 581a4 Rocket Propulsion Class Notes - Page: 1 Notes02.doc Thrust and The Rocket Equation Text: Sutton Ch. 2 and 4 Technical ObjectivesDocument9 paginiMECH 581a4 Rocket Propulsion Class Notes - Page: 1 Notes02.doc Thrust and The Rocket Equation Text: Sutton Ch. 2 and 4 Technical ObjectivesUma MageshwariÎncă nu există evaluări
- Staging and Control of Rockets and Missiles - PritamashutoshDocument9 paginiStaging and Control of Rockets and Missiles - PritamashutoshUma MageshwariÎncă nu există evaluări
- Detection and Estimation Theory Lectures 19: Mojtaba Soltanalian-UICDocument13 paginiDetection and Estimation Theory Lectures 19: Mojtaba Soltanalian-UICUma MageshwariÎncă nu există evaluări
- Electrical Power Subsystem: Solar ArrayDocument5 paginiElectrical Power Subsystem: Solar ArrayUma MageshwariÎncă nu există evaluări
- AdaDocument30 paginiAdaUma MageshwariÎncă nu există evaluări
- ARINC 429 Data Bus Characteristics: ParityDocument1 paginăARINC 429 Data Bus Characteristics: ParityUma MageshwariÎncă nu există evaluări
- Q & A - Mil-Std-1553 PDFDocument30 paginiQ & A - Mil-Std-1553 PDFUma MageshwariÎncă nu există evaluări
- Zinger PDFDocument20 paginiZinger PDFUma MageshwariÎncă nu există evaluări
- Control System Engineering - 1Document22 paginiControl System Engineering - 1Uma MageshwariÎncă nu există evaluări
- V2500 - The Engine of Choice: Airbus A319, A320, and A321 Boeing MD-90 Twinjet Airbus Corporate Jets Embraer KC-390Document2 paginiV2500 - The Engine of Choice: Airbus A319, A320, and A321 Boeing MD-90 Twinjet Airbus Corporate Jets Embraer KC-390Afghanistan2010Încă nu există evaluări
- Contract 1 ProjectDocument21 paginiContract 1 ProjectAditi BanerjeeÎncă nu există evaluări
- What Is Public RelationsDocument52 paginiWhat Is Public RelationsMarwa MoussaÎncă nu există evaluări
- Blackstone The Dash Model #1610 Owner's ManualDocument53 paginiBlackstone The Dash Model #1610 Owner's ManualSydney Adam SteeleÎncă nu există evaluări
- Analog Electronics-2 PDFDocument20 paginiAnalog Electronics-2 PDFAbhinav JangraÎncă nu există evaluări
- RRB 17 Sep Set 2 Ibps Guide - Ibps Po, Sbi Clerk, RRB, SSC - Online Mock TestDocument46 paginiRRB 17 Sep Set 2 Ibps Guide - Ibps Po, Sbi Clerk, RRB, SSC - Online Mock TestBharat KumarÎncă nu există evaluări
- Inqlusive Newsrooms LGBTQIA Media Reference Guide English 2023 E1Document98 paginiInqlusive Newsrooms LGBTQIA Media Reference Guide English 2023 E1Disability Rights AllianceÎncă nu există evaluări
- Volvo HU 803Document8 paginiVolvo HU 803GiegloÎncă nu există evaluări
- Introduction To Templates in C++Document16 paginiIntroduction To Templates in C++hammarbytpÎncă nu există evaluări
- CH 2 PDFDocument85 paginiCH 2 PDFSajidÎncă nu există evaluări
- Research Design: An Overview: Multiple Choice QuestionsDocument28 paginiResearch Design: An Overview: Multiple Choice QuestionsBashayerhmmÎncă nu există evaluări
- Operation ManagementDocument4 paginiOperation ManagementHananiya GizawÎncă nu există evaluări
- Beginning Cosmetic ChemistryDocument1 paginăBeginning Cosmetic ChemistrySergio Rugerio0% (1)
- Dashrath Nandan JAVA (Unit2) NotesDocument18 paginiDashrath Nandan JAVA (Unit2) NotesAbhinandan Singh RanaÎncă nu există evaluări
- Busbusilak - ResearchPlan 3Document4 paginiBusbusilak - ResearchPlan 3zkcsswddh6Încă nu există evaluări
- Experiment 2: Multimeter Laboratory ReportDocument4 paginiExperiment 2: Multimeter Laboratory ReportNoir SalifoÎncă nu există evaluări
- sp.1.3.3 Atoms,+Elements+&+Molecules+ActivityDocument4 paginisp.1.3.3 Atoms,+Elements+&+Molecules+ActivityBryaniÎncă nu există evaluări
- Ccie R&s Expanded-BlueprintDocument12 paginiCcie R&s Expanded-BlueprintAftab AlamÎncă nu există evaluări
- TakeawaysDocument2 paginiTakeawaysapi-509552154Încă nu există evaluări
- ModelsimDocument47 paginiModelsimKishor KumarÎncă nu există evaluări
- Exam TimetableDocument16 paginiExam Timetablenyarko_eÎncă nu există evaluări
- Sample TRM All Series 2020v1 - ShortseDocument40 paginiSample TRM All Series 2020v1 - ShortseSuhail AhmadÎncă nu există evaluări
- Case StudyDocument15 paginiCase StudyChaitali moreyÎncă nu există evaluări
- File 1038732040Document70 paginiFile 1038732040Karen Joyce Costales MagtanongÎncă nu există evaluări