S-ar putea să vă placă și
- New Era University: EE 572 Electrical Machine Design "Design I-A"Document21 paginiNew Era University: EE 572 Electrical Machine Design "Design I-A"DanixÎncă nu există evaluări
- Electrical Machine DesignDocument8 paginiElectrical Machine DesignArvin TorrenteÎncă nu există evaluări
- ComputationDocument13 paginiComputationLester MuscaÎncă nu există evaluări
- 50 Kva Distibution Transformer DesignDocument9 pagini50 Kva Distibution Transformer Designjera garcia100% (1)
- Design ProblemDocument9 paginiDesign Problemejay.d2Încă nu există evaluări
- Pyrhonen Squirrel Cage Motor Calculation Mathcad13Document35 paginiPyrhonen Squirrel Cage Motor Calculation Mathcad13Mutee Ullah KhanÎncă nu există evaluări
- Bus Bar CalculationDocument8 paginiBus Bar CalculationSubhash ChekkaÎncă nu există evaluări
- Design of Distribution Transformer: Guaranteed LossesDocument8 paginiDesign of Distribution Transformer: Guaranteed Lossesprincedo marcelloÎncă nu există evaluări
- Ce 03024Document211 paginiCe 03024kimchhoungÎncă nu există evaluări
- Design of Armature Stator of Ac GeneratorDocument18 paginiDesign of Armature Stator of Ac GeneratorEngelie Mae ColloÎncă nu există evaluări
- CE305 Reinforced Concrete Design: Topics: Examples On T Beam Design WEEK: 11 Level: 6 Semester 3 Year Prerequisites: NoneDocument22 paginiCE305 Reinforced Concrete Design: Topics: Examples On T Beam Design WEEK: 11 Level: 6 Semester 3 Year Prerequisites: NoneAsadullah Khan GhalibÎncă nu există evaluări
- Solved Problems On Armature of A DC Machine Continuation of Chapter 2-VKDocument21 paginiSolved Problems On Armature of A DC Machine Continuation of Chapter 2-VKianmansour67% (3)
- AE401 - Tee Spandrel and SlabsDocument13 paginiAE401 - Tee Spandrel and SlabsThomas MartinÎncă nu există evaluări
- Stator Design of An AlternatorDocument11 paginiStator Design of An AlternatorJean Clark Catacutan100% (1)
- Synchronous Machines-1Document41 paginiSynchronous Machines-1Rouxcel abutoÎncă nu există evaluări
- EMD June 2012Document2 paginiEMD June 2012kmnath1965Încă nu există evaluări
- Amp 2021-09Document10 paginiAmp 2021-09Renata OsunaÎncă nu există evaluări
- AMP Exam Solution 10 09 2021Document10 paginiAMP Exam Solution 10 09 2021Dhanush YoganandhanÎncă nu există evaluări
- Machine Design of Stepper MotorsDocument12 paginiMachine Design of Stepper Motorsabhrajit ghoshÎncă nu există evaluări
- Design 7 Induction MotorDocument7 paginiDesign 7 Induction MotorNoykols GRncÎncă nu există evaluări
- Wee1964 N001Document9 paginiWee1964 N001Oliver RubioÎncă nu există evaluări
- Busbar CalculationDocument8 paginiBusbar Calculationd_rosembergÎncă nu există evaluări
- Busbar CalculationDocument8 paginiBusbar Calculationdsilvasaucedo100% (4)
- Design Procedure For A Power Transformer Using EI Core: Required SpecificationDocument8 paginiDesign Procedure For A Power Transformer Using EI Core: Required SpecificationJohn Carlo DizonÎncă nu există evaluări
- A. - B. Derive The Expression For Pitch Factore. CDocument8 paginiA. - B. Derive The Expression For Pitch Factore. CStream MarkusÎncă nu există evaluări
- Simulacion Aero Enfriador PDFDocument40 paginiSimulacion Aero Enfriador PDFNicandroGonzalesÎncă nu există evaluări
- Motor Rewinding - DETAILS OF WINDINGDocument12 paginiMotor Rewinding - DETAILS OF WINDINGAbdul Halil Abdullah100% (1)
- Continuation of Machne DesignDocument38 paginiContinuation of Machne DesignHalley Mayer TorresÎncă nu există evaluări
- Design of Electrical Apparatus - Question PaperDocument12 paginiDesign of Electrical Apparatus - Question PaperVIGNESH T AÎncă nu există evaluări
- Rotating Electrical MachinesDocument33 paginiRotating Electrical Machinesgurunathan14Încă nu există evaluări
- Design Sheet For Armature of DC Generator (Complete)Document11 paginiDesign Sheet For Armature of DC Generator (Complete)Noykols GRncÎncă nu există evaluări
- Pile Caps 01Document3 paginiPile Caps 01bankboyÎncă nu există evaluări
- Lista Cap 3Document6 paginiLista Cap 3Wagner WuthrichÎncă nu există evaluări
- EEE8155 Design and Analysis of Electrical Machines and DrivesDocument13 paginiEEE8155 Design and Analysis of Electrical Machines and DrivesstephenÎncă nu există evaluări
- Me Year WisebnDocument517 paginiMe Year WisebnShashank PathakÎncă nu există evaluări
- How To Determine Correct Number of Earthing Electrodes (Strips, Plates and Pipes) - Part 1Document12 paginiHow To Determine Correct Number of Earthing Electrodes (Strips, Plates and Pipes) - Part 1Burraq Engineering SolutionsÎncă nu există evaluări
- 08 - Compression Member DesignDocument14 pagini08 - Compression Member DesignAli ZubairÎncă nu există evaluări
- Reinforced Concrete Cantilever Beam Analysis and Design (ACI 318 14)Document34 paginiReinforced Concrete Cantilever Beam Analysis and Design (ACI 318 14)Adnane OuÎncă nu există evaluări
- Shaft DesignDocument18 paginiShaft DesignWest100% (1)
- Advance 20Document12 paginiAdvance 20Phantom1699Încă nu există evaluări
- Conductor-Sizing IECDocument2 paginiConductor-Sizing IECnb nbÎncă nu există evaluări
- 18 SG With Round Rotor DesignDocument45 pagini18 SG With Round Rotor DesignAnonymous 2eBal0sÎncă nu există evaluări
- Homework Chapter3Document26 paginiHomework Chapter3nxey bonxÎncă nu există evaluări
- How To Determine Correct Number of Earthing Electroding FactorDocument14 paginiHow To Determine Correct Number of Earthing Electroding FactorumerÎncă nu există evaluări
- dl449 June2013Document2 paginidl449 June2013Ruma SinhaÎncă nu există evaluări
- Synchronous Machines: List of FormulaeDocument6 paginiSynchronous Machines: List of FormulaekkkÎncă nu există evaluări
- Test ProblemsDocument1 paginăTest ProblemsQuen EscletoÎncă nu există evaluări
- Electric Circuits and FieldsDocument20 paginiElectric Circuits and Fieldssubhrajit kumar sethiÎncă nu există evaluări
- CalculationsDocument23 paginiCalculationsMuhammad Hamza SaleemÎncă nu există evaluări
- Question Paper Code:: Reg. No.Document3 paginiQuestion Paper Code:: Reg. No.ABISHEK AJAYÎncă nu există evaluări
- Electrical Machine 3Document4 paginiElectrical Machine 3AbhishekÎncă nu există evaluări
- Three Phase Induction Motors: Output Equation of Induction MotorDocument7 paginiThree Phase Induction Motors: Output Equation of Induction MotoraaparumugamÎncă nu există evaluări
- Analytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportDe la EverandAnalytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportÎncă nu există evaluări
- Differential Forms on Electromagnetic NetworksDe la EverandDifferential Forms on Electromagnetic NetworksEvaluare: 4 din 5 stele4/5 (1)
- Mathematical and Computational Modeling: With Applications in Natural and Social Sciences, Engineering, and the ArtsDe la EverandMathematical and Computational Modeling: With Applications in Natural and Social Sciences, Engineering, and the ArtsRoderick MelnikÎncă nu există evaluări
- Solution Manual for 100 Genesys Design Examples: Second EditionDe la EverandSolution Manual for 100 Genesys Design Examples: Second EditionÎncă nu există evaluări
- EDI40AS1-EDI55AS1 Active Control AutomationDocument2 paginiEDI40AS1-EDI55AS1 Active Control AutomationLester MuscaÎncă nu există evaluări
- CBA10 A 2Document1 paginăCBA10 A 2Lester MuscaÎncă nu există evaluări
- CBA10 ADocument1 paginăCBA10 ALester MuscaÎncă nu există evaluări
- CBA10 B 2Document1 paginăCBA10 B 2Lester MuscaÎncă nu există evaluări
- Isuzu Engine 45kva Single QuotationDocument4 paginiIsuzu Engine 45kva Single QuotationLester MuscaÎncă nu există evaluări
- CBA10 ADocument1 paginăCBA10 ALester MuscaÎncă nu există evaluări
- Littel Fuse ApprovalDocument1 paginăLittel Fuse ApprovalLester MuscaÎncă nu există evaluări
- MTS 100a and 125aDocument1 paginăMTS 100a and 125aLester MuscaÎncă nu există evaluări
- Isuzu Engine 45kva Single QuotationDocument4 paginiIsuzu Engine 45kva Single QuotationLester MuscaÎncă nu există evaluări
- Littel FuseDocument1 paginăLittel FuseLester MuscaÎncă nu există evaluări
- Littelfuse Purchase Order 2534017Document1 paginăLittelfuse Purchase Order 2534017Lester Musca100% (1)
- Insulation Test Report Sta Rosa NeDocument2 paginiInsulation Test Report Sta Rosa NeLester MuscaÎncă nu există evaluări
- Megalight 2Document2 paginiMegalight 2Lester MuscaÎncă nu există evaluări
- Order Form For Littelfuse Door Lock2Document6 paginiOrder Form For Littelfuse Door Lock2Lester MuscaÎncă nu există evaluări
- Construction of Server Room ORO 05302018Document1 paginăConstruction of Server Room ORO 05302018Lester MuscaÎncă nu există evaluări
- User Requirements SpecificationDocument3 paginiUser Requirements SpecificationLester MuscaÎncă nu există evaluări
- Endorsement Letter - Musca LesterDocument1 paginăEndorsement Letter - Musca LesterLester MuscaÎncă nu există evaluări
- Report On International Efficiency Efficiency Classes For Low Voltage AC MotorsDocument13 paginiReport On International Efficiency Efficiency Classes For Low Voltage AC MotorsmersiumÎncă nu există evaluări
- FSR Numan Food SupplimentDocument6 paginiFSR Numan Food SupplimentLester MuscaÎncă nu există evaluări
- Altivar Process ATV600 - ATV630C31N4Document13 paginiAltivar Process ATV600 - ATV630C31N4Lester MuscaÎncă nu există evaluări
- New Flipchart ScriptDocument5 paginiNew Flipchart ScriptLester MuscaÎncă nu există evaluări
- Electrical ExamDocument2 paginiElectrical ExamLester MuscaÎncă nu există evaluări
- No Cylinder Maintenance Location Date KW-HR Total Amount (PHP)Document6 paginiNo Cylinder Maintenance Location Date KW-HR Total Amount (PHP)Lester MuscaÎncă nu există evaluări
- FSR MegaworldDocument8 paginiFSR MegaworldLester MuscaÎncă nu există evaluări
- Engr. Kevin S. Erto, Rme: ContactDocument1 paginăEngr. Kevin S. Erto, Rme: ContactLester MuscaÎncă nu există evaluări
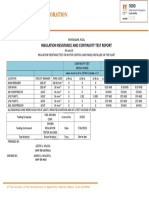
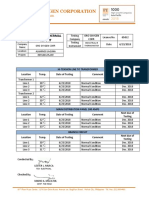
- Oro Oxygen Corporation: Insulation Resistance and Continuity Test ReportDocument1 paginăOro Oxygen Corporation: Insulation Resistance and Continuity Test ReportLester MuscaÎncă nu există evaluări
- Oro Oxygen Corporation: Insulation Resistance and Continuity Test ReportDocument2 paginiOro Oxygen Corporation: Insulation Resistance and Continuity Test ReportLester MuscaÎncă nu există evaluări
- Electrical Findings 6Document13 paginiElectrical Findings 6Lester Musca100% (1)
- Oro Oxygen Corporation: Insulation Resistance and Continuity Test ReportDocument2 paginiOro Oxygen Corporation: Insulation Resistance and Continuity Test ReportLester MuscaÎncă nu există evaluări
- Oro Oxygen Corporation: Electrical ThermalDocument1 paginăOro Oxygen Corporation: Electrical ThermalLester MuscaÎncă nu există evaluări
- Negative Sequence Current in Wind Turbines Type 3 1637954804Document6 paginiNegative Sequence Current in Wind Turbines Type 3 1637954804Chandra R. SirendenÎncă nu există evaluări
- Note 2958296 Pre-Implementation Steps: Create Table TypeDocument3 paginiNote 2958296 Pre-Implementation Steps: Create Table Typevishnu900890Încă nu există evaluări
- Psychological Attitude Towards SafetyDocument17 paginiPsychological Attitude Towards SafetyAMOL RASTOGI 19BCM0012Încă nu există evaluări
- WS-250 4BB 60 Cells 40mm DatasheetDocument2 paginiWS-250 4BB 60 Cells 40mm DatasheetTejash NaikÎncă nu există evaluări
- Road To Recovery: Moving To A New NormalDocument10 paginiRoad To Recovery: Moving To A New NormalFOX5 VegasÎncă nu există evaluări
- CIE Physics IGCSE: General Practical SkillsDocument3 paginiCIE Physics IGCSE: General Practical SkillsSajid Mahmud ChoudhuryÎncă nu există evaluări
- A Comprehensive Review On Renewable and Sustainable Heating Systems For Poultry FarmingDocument22 paginiA Comprehensive Review On Renewable and Sustainable Heating Systems For Poultry FarmingPl TorrÎncă nu există evaluări
- Zapanta v. COMELECDocument3 paginiZapanta v. COMELECnrpostreÎncă nu există evaluări
- Instructions: This Affidavit Should Be Executed by The PersonDocument1 paginăInstructions: This Affidavit Should Be Executed by The PersonspcbankingÎncă nu există evaluări
- Data MiningDocument721 paginiData MiningAuly Natijatul AinÎncă nu există evaluări
- What Is EBSD ? Why Use EBSD ? Why Measure Microstructure ? What Does EBSD Do That Cannot Already Be Done ?Document5 paginiWhat Is EBSD ? Why Use EBSD ? Why Measure Microstructure ? What Does EBSD Do That Cannot Already Be Done ?Zahir Rayhan JhonÎncă nu există evaluări
- CRITERIA-GuideRail & Median BarriersDocument15 paginiCRITERIA-GuideRail & Median BarriersMartbenÎncă nu există evaluări
- Craske - Mastering Your Fears and FobiasDocument174 paginiCraske - Mastering Your Fears and Fobiasjuliana218Încă nu există evaluări
- BGD Country en Excel v2Document2.681 paginiBGD Country en Excel v2Taskin SadmanÎncă nu există evaluări
- Future Generation Computer SystemsDocument18 paginiFuture Generation Computer SystemsEkoÎncă nu există evaluări
- Web Server ProjectDocument16 paginiWeb Server Projectمعتز العجيليÎncă nu există evaluări
- 04.CNOOC Engages With Canadian Stakeholders PDFDocument14 pagini04.CNOOC Engages With Canadian Stakeholders PDFAdilÎncă nu există evaluări
- Problem SetDocument61 paginiProblem SetEmily FungÎncă nu există evaluări
- Firmware Upgrade To SP3 From SP2: 1. Download Necessary Drivers For The OMNIKEY 5427 CKDocument6 paginiFirmware Upgrade To SP3 From SP2: 1. Download Necessary Drivers For The OMNIKEY 5427 CKFilip Andru MorÎncă nu există evaluări
- HRM OmantelDocument8 paginiHRM OmantelSonia Braham100% (1)
- Netaji Subhas Open UniversityDocument4 paginiNetaji Subhas Open UniversityraydipanjanÎncă nu există evaluări
- 1634 - Gondola Head Super - Structure and Side Wall - ENDocument8 pagini1634 - Gondola Head Super - Structure and Side Wall - ENmohammadÎncă nu există evaluări
- PraxiarDocument8 paginiPraxiara_roy003Încă nu există evaluări
- 819-5917-April 2021-Domestic Warranty Policy ManualDocument46 pagini819-5917-April 2021-Domestic Warranty Policy ManualDean KershnerÎncă nu există evaluări
- AW-NB037H-SPEC - Pegatron Lucid V1.3 - BT3.0+HS Control Pin Separated - PIN5 - Pin20Document8 paginiAW-NB037H-SPEC - Pegatron Lucid V1.3 - BT3.0+HS Control Pin Separated - PIN5 - Pin20eldi_yeÎncă nu există evaluări
- Problems of Spun Concrete Piles Constructed in Soft Soil in HCMC and Mekong Delta - VietnamDocument6 paginiProblems of Spun Concrete Piles Constructed in Soft Soil in HCMC and Mekong Delta - VietnamThaoÎncă nu există evaluări
- Autoclave 2Document52 paginiAutoclave 2SILVANA ELIZABETH ROMO ALBUJAÎncă nu există evaluări
- Curriculum Vitae H R VijayDocument8 paginiCurriculum Vitae H R VijayvijaygowdabdvtÎncă nu există evaluări
- Payment Systems Worldwide: Appendix Country-by-Country AnswersDocument306 paginiPayment Systems Worldwide: Appendix Country-by-Country Answersravinewatia27Încă nu există evaluări
- New VLSIDocument2 paginiNew VLSIRanjit KumarÎncă nu există evaluări