S-ar putea să vă placă și
- Elektor en Article Easyavr5a Serial Ethernet BasicDocument2 paginiElektor en Article Easyavr5a Serial Ethernet BasicIng. Mitchel Jammal S.Încă nu există evaluări
- Digital Bechtop Power Supply (2) : Part 2: Soldering, Sawing and DrillingDocument5 paginiDigital Bechtop Power Supply (2) : Part 2: Soldering, Sawing and DrillingTariq ZuhlufÎncă nu există evaluări
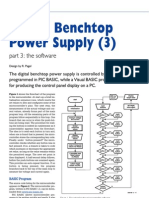
- Digital Benchtop Power Supply (3) : Part 3: The SoftwareDocument4 paginiDigital Benchtop Power Supply (3) : Part 3: The SoftwareSchundaÎncă nu există evaluări
- Pamphlet - EIR May131980 PDFDocument66 paginiPamphlet - EIR May131980 PDFNielsen VegaÎncă nu există evaluări
- BabbittDocument4 paginiBabbitthrsreenathÎncă nu există evaluări
- 4047Document4 pagini4047rayanÎncă nu există evaluări
- Proy. Electrónico DC Power MeterDocument20 paginiProy. Electrónico DC Power Metervpol25Încă nu există evaluări
- The Rise and Fall of Eskom - and How To Fi X It NowDocument22 paginiThe Rise and Fall of Eskom - and How To Fi X It NowFadia Salie100% (2)
- Audioxpress August 2022Document35 paginiAudioxpress August 2022will scottÎncă nu există evaluări
- 37 Piece Sensor Description PDFDocument7 pagini37 Piece Sensor Description PDFMichael VincentÎncă nu există evaluări
- TubeVsTransistor TextDocument7 paginiTubeVsTransistor TextKevin Perez EscalanteÎncă nu există evaluări
- MyRoom Acoustics AES PaperDocument5 paginiMyRoom Acoustics AES PaperMilan AnticÎncă nu există evaluări
- Jaes V60 9 AllDocument115 paginiJaes V60 9 AllPhilipp Linder100% (1)
- Image Method For Efficiently Simulating Small-Room Acoustics - DSP - ProjectDocument8 paginiImage Method For Efficiently Simulating Small-Room Acoustics - DSP - Projectsepehr_240Încă nu există evaluări
- Elektor (Nonlinear - Ir) 2015-11 - 12 PDFDocument106 paginiElektor (Nonlinear - Ir) 2015-11 - 12 PDFxx67% (3)
- PDFDocument30 paginiPDFcosasdeangelÎncă nu există evaluări
- Biblio AFTDocument3 paginiBiblio AFTSandro JoséÎncă nu există evaluări
- Jaes V52 6 All PDFDocument124 paginiJaes V52 6 All PDFtimosp1973Încă nu există evaluări
- Tilting Pad BearingDocument2 paginiTilting Pad BearingmojiryhamidÎncă nu există evaluări
- Acoustic Measurement StandardsDocument30 paginiAcoustic Measurement Standardsnikita011Încă nu există evaluări
- Construction Article A Hi-Fi Vacuum Tube Phono PreampDocument18 paginiConstruction Article A Hi-Fi Vacuum Tube Phono PreampΔημητριος Σταθης100% (1)
- My Four Years in Germany by Gerard, James W., 1867-1951Document188 paginiMy Four Years in Germany by Gerard, James W., 1867-1951Gutenberg.org100% (1)
- 1 - Tubes Versus Transistors - Is There An Audible DifferenceDocument5 pagini1 - Tubes Versus Transistors - Is There An Audible DifferenceangelozuccoÎncă nu există evaluări
- Evil in America (PDFDrive)Document110 paginiEvil in America (PDFDrive)Miguel Angel Mociño GuadarramaÎncă nu există evaluări
- UnilabDocument5 paginiUnilabshoker4Încă nu există evaluări
- Room AcousticsDocument88 paginiRoom AcousticsArunÎncă nu există evaluări
- Ani C Bus Analyser To Let You Satisfy Your Curiosity: The Secrets of I CDocument7 paginiAni C Bus Analyser To Let You Satisfy Your Curiosity: The Secrets of I CChico SouzaÎncă nu există evaluări
- Acoustical Transducers - Lecture 5Document25 paginiAcoustical Transducers - Lecture 5Anonymous W9zlG22RÎncă nu există evaluări
- Elektor USA - October 2014 PDFDocument92 paginiElektor USA - October 2014 PDFJean-Pierre Desrochers100% (4)
- HY4008P/M/B/PS/PM: Pin Description F EaturesDocument14 paginiHY4008P/M/B/PS/PM: Pin Description F EaturesElectrical Power Engineering100% (1)
- Complete EDM Handbook - 12Document10 paginiComplete EDM Handbook - 12ks2000n1Încă nu există evaluări
- Cbeam Machine PDFDocument40 paginiCbeam Machine PDFLinh Fung100% (1)
- Easy To Build CNC Mill Stepper Motor and Driver CircuitDocument12 paginiEasy To Build CNC Mill Stepper Motor and Driver Circuitmarandan85Încă nu există evaluări
- CNC G-Code and M-Code Reference For CNC MachinesDocument8 paginiCNC G-Code and M-Code Reference For CNC MachinesShashank PathakÎncă nu există evaluări
- WebUser 7 October 2010Document113 paginiWebUser 7 October 2010Aziz Rahman100% (1)
- Gould Dso400Document57 paginiGould Dso400Beata TrefonÎncă nu există evaluări
- On WitricityDocument22 paginiOn WitricitySantosh KumarÎncă nu există evaluări
- Measurements in Acoustics (Bruel & Kjaer)Document46 paginiMeasurements in Acoustics (Bruel & Kjaer)Carlorel AnteÎncă nu există evaluări
- Pure Energy Systems Wiki Free Electric Energy in Theory and Practice Peswiki PDFDocument41 paginiPure Energy Systems Wiki Free Electric Energy in Theory and Practice Peswiki PDFdiemnganÎncă nu există evaluări
- Submitted By: Rajat Garg C08541 EECE, 7th SemDocument22 paginiSubmitted By: Rajat Garg C08541 EECE, 7th Semrajatgarg90Încă nu există evaluări
- WiTricity TechnologyDocument4 paginiWiTricity TechnologyamaleshraviÎncă nu există evaluări
- WITRICITYDocument17 paginiWITRICITYSai VikramÎncă nu există evaluări
- AC Current Measurement Using CTDocument22 paginiAC Current Measurement Using CTKoushik MaityÎncă nu există evaluări
- N.H. Crowhurst - Audio Handbook No.1 - AmplifiersDocument26 paginiN.H. Crowhurst - Audio Handbook No.1 - AmplifiersViktor Döme100% (1)
- Heslin - 2007 - Augustus, Domitian and The So-Called Horologium AuDocument20 paginiHeslin - 2007 - Augustus, Domitian and The So-Called Horologium AuphilodemusÎncă nu există evaluări
- Measuring Loudspeaker Low-Frequency Response - AudioXpressDocument1 paginăMeasuring Loudspeaker Low-Frequency Response - AudioXpressAndrey PanfilovÎncă nu există evaluări
- lm338 Mil PDFDocument28 paginilm338 Mil PDFNepomuceno Collazos100% (1)
- Jaes V52 1 2 All PDFDocument116 paginiJaes V52 1 2 All PDFtimosp1973Încă nu există evaluări
- 3D Simulation of The Vertical Axis Wind TurbinesDocument4 pagini3D Simulation of The Vertical Axis Wind TurbinesMostafa RashedÎncă nu există evaluări
- Companion 3 Series Ii SM - R05Document30 paginiCompanion 3 Series Ii SM - R05LUIS PETIT100% (1)
- Complete Motor Guide For RoboticsDocument50 paginiComplete Motor Guide For RoboticsAngie100% (2)
- WitricityDocument33 paginiWitricityJay SharmaÎncă nu există evaluări
- Circuit Collections 001-030Document30 paginiCircuit Collections 001-030zawmintun1Încă nu există evaluări
- Ubm Edn 20120202Document52 paginiUbm Edn 20120202David Felipe García Cadavid100% (1)
- Witricity Seminar ReortDocument18 paginiWitricity Seminar Reortsrjonas50% (2)
- DS UbiqserialDocument4 paginiDS UbiqserialhajarÎncă nu există evaluări
- Serial Communications Module: Digital DriveDocument2 paginiSerial Communications Module: Digital DrivecarlosorizabaÎncă nu există evaluări
- RS232 Serial Cable Pinout InformationDocument5 paginiRS232 Serial Cable Pinout InformationRanieri BenčićÎncă nu există evaluări
- RS232 Serial Cable Pinout InformationDocument5 paginiRS232 Serial Cable Pinout Informationshrikant_i4u1164Încă nu există evaluări
- Re (Etka: Kombinacije Ventilacijskih Re (Etki I RegulatoraDocument1 paginăRe (Etka: Kombinacije Ventilacijskih Re (Etki I Regulatorathermosol5416Încă nu există evaluări
- Hydro-Tower: Minimal Space Requirement - Maximal System EfficiencyDocument2 paginiHydro-Tower: Minimal Space Requirement - Maximal System Efficiencythermosol5416Încă nu există evaluări
- Tecnical DocumentationDocument441 paginiTecnical Documentationthermosol541678% (18)
- Technical Manual - Floor Standing FCUDocument2 paginiTechnical Manual - Floor Standing FCUthermosol5416Încă nu există evaluări
- Smartrad Fan Convectors: Simple Installation and High Heat Output Ideal For Combining With Heat PumpsDocument2 paginiSmartrad Fan Convectors: Simple Installation and High Heat Output Ideal For Combining With Heat Pumpsthermosol5416Încă nu există evaluări
- 387-En La TasDocument2 pagini387-En La Tasthermosol5416Încă nu există evaluări
- Mini Unitary Chiller20090302Document1 paginăMini Unitary Chiller20090302thermosol5416Încă nu există evaluări
- Air-to-Water Heat Pump For High Heat OutputsDocument2 paginiAir-to-Water Heat Pump For High Heat Outputsthermosol5416Încă nu există evaluări
- High-Efficiency Air-To-Water Heat Pumps: High Performance Without NoiseDocument2 paginiHigh-Efficiency Air-To-Water Heat Pumps: High Performance Without Noisethermosol5416Încă nu există evaluări
- High-Efficiency Air-To-Water Heat Pumps: High Performance Without NoiseDocument2 paginiHigh-Efficiency Air-To-Water Heat Pumps: High Performance Without Noisethermosol5416Încă nu există evaluări
- 380-En Latur35Document2 pagini380-En Latur35thermosol5416Încă nu există evaluări
- 384-En HPK TewDocument2 pagini384-En HPK Tewthermosol5416Încă nu există evaluări
- Renewable Energy Sector ProfileDocument62 paginiRenewable Energy Sector Profilethermosol5416Încă nu există evaluări
- European ProductsDocument72 paginiEuropean Productsthermosol5416Încă nu există evaluări
- Eu Directive 2002 91 EcDocument7 paginiEu Directive 2002 91 Ecevgenija89Încă nu există evaluări
- V04 Hydro-Geothermal Plants - Detailed Guide PDFDocument150 paginiV04 Hydro-Geothermal Plants - Detailed Guide PDFthermosol5416Încă nu există evaluări
- Comparative Life Cycle Assessments: Carbon Neutrality and Wood Biomass EnergyDocument21 paginiComparative Life Cycle Assessments: Carbon Neutrality and Wood Biomass Energythermosol5416Încă nu există evaluări
- Netherlands ECR PreviewDocument4 paginiNetherlands ECR Previewthermosol5416Încă nu există evaluări
- 2008 Res Working Document enDocument38 pagini2008 Res Working Document enthermosol5416Încă nu există evaluări
- Review of The Manomet Biomass Sustainability and Carbon Policy StudyDocument24 paginiReview of The Manomet Biomass Sustainability and Carbon Policy Studythermosol5416Încă nu există evaluări
- Dena-Grid Study SummaryDocument23 paginiDena-Grid Study Summarythermosol5416Încă nu există evaluări
- UNDP SRB Biomass Plants Detailed Guide PDFDocument123 paginiUNDP SRB Biomass Plants Detailed Guide PDFVidor LakatosÎncă nu există evaluări
- V01n01a06 Ljiljana DjukanovicDocument8 paginiV01n01a06 Ljiljana Djukanovicthermosol5416Încă nu există evaluări
- BTL Implementation ReportDocument18 paginiBTL Implementation Reportthermosol5416Încă nu există evaluări
- Monitoring I Evaluaciono Istrazivanje Promene Politike Energetske Efikasnosti Paralelni Monitoring Evaluacija I Komunika PDFDocument15 paginiMonitoring I Evaluaciono Istrazivanje Promene Politike Energetske Efikasnosti Paralelni Monitoring Evaluacija I Komunika PDFthermosol5416Încă nu există evaluări
- Energy Modernisation of Industrial HeatingDocument24 paginiEnergy Modernisation of Industrial Heatingthermosol5416Încă nu există evaluări
- Getting From AEDGs To Zero Energy Buildings PDFDocument64 paginiGetting From AEDGs To Zero Energy Buildings PDFthermosol5416Încă nu există evaluări
- Getting From AEDGs To Zero Energy Buildings PDFDocument64 paginiGetting From AEDGs To Zero Energy Buildings PDFthermosol5416Încă nu există evaluări
- Calculation ExamplesDocument42 paginiCalculation Examplesthermosol5416Încă nu există evaluări
- ATT 1359868225594 Presek Predavanje SumaracDocument2 paginiATT 1359868225594 Presek Predavanje Sumaracthermosol5416Încă nu există evaluări
- Data Loss PreventionDocument24 paginiData Loss PreventionhelmaaroufiÎncă nu există evaluări
- Liquid Penetrant Test Procedure: Document No.: SP-1.5 Rev. 1.2Document12 paginiLiquid Penetrant Test Procedure: Document No.: SP-1.5 Rev. 1.2Anas PratamaÎncă nu există evaluări
- PCBA-WP543HV HW Manual Rev1.05Document21 paginiPCBA-WP543HV HW Manual Rev1.05Surapong Pongchaiprateep100% (1)
- Argumentative EssayDocument20 paginiArgumentative EssayLuthfi MaullanaÎncă nu există evaluări
- Samsung SSD 850 EVO M2 Data Sheet Rev2Document4 paginiSamsung SSD 850 EVO M2 Data Sheet Rev2Piyush ShrivastavaÎncă nu există evaluări
- TG Synchronization Connections For RbsDocument11 paginiTG Synchronization Connections For RbsJack Sprw67% (3)
- TWITCH INTERACTIVE, INC. v. JOHN AND JANE DOES 1-100Document18 paginiTWITCH INTERACTIVE, INC. v. JOHN AND JANE DOES 1-100PolygondotcomÎncă nu există evaluări
- Hydraulic BrakeDocument29 paginiHydraulic Brakerup_ranjan532250% (8)
- RanapDocument4 paginiRanapJane GoodwinÎncă nu există evaluări
- 165 NebulizerDocument2 pagini165 NebulizerLotfi BahriÎncă nu există evaluări
- Unit 2Document3 paginiUnit 2lewlking123Încă nu există evaluări
- Valve Operation and System DesignDocument208 paginiValve Operation and System DesignWalter José de Miranda100% (8)
- Organic PoolsDocument163 paginiOrganic PoolsEdu Socolovsky100% (3)
- MM LabDocument4 paginiMM LabJstill54Încă nu există evaluări
- 9591-102-102-PVM-U-009-02A Nox CalculationsDocument16 pagini9591-102-102-PVM-U-009-02A Nox CalculationsVijay PalÎncă nu există evaluări
- Parthiban Kanavu Part 3Document98 paginiParthiban Kanavu Part 3ambalvananÎncă nu există evaluări
- Airbus A380-800Document3 paginiAirbus A380-800Usman MushtaqÎncă nu există evaluări
- ProKlima Entfeuchter ManualDocument336 paginiProKlima Entfeuchter ManualJonÎncă nu există evaluări
- Glastic Utr Angles ChannelsDocument2 paginiGlastic Utr Angles Channelsdanielliram993Încă nu există evaluări
- fmx4 PartsDocument1 paginăfmx4 PartsФедя ФедяÎncă nu există evaluări
- Logic SelectivityDocument6 paginiLogic SelectivitymoosuhaibÎncă nu există evaluări
- TravelerSafe ReadMe PDFDocument17 paginiTravelerSafe ReadMe PDFnatadevxÎncă nu există evaluări
- Hoja de EspecificacionesDocument2 paginiHoja de Especificacionesacere18Încă nu există evaluări
- Electoral ListDocument189 paginiElectoral ListAhmadShazebAzharÎncă nu există evaluări
- ME8595 SyllabusDocument1 paginăME8595 SyllabusDeepak sakthiÎncă nu există evaluări
- Imovie Presentation Rubric EfDocument1 paginăImovie Presentation Rubric Efapi-239838395Încă nu există evaluări
- Manual M810Document38 paginiManual M810romiyuddinÎncă nu există evaluări
- Updated After 11th BoS Course Curriculum - B.tech CSEDocument120 paginiUpdated After 11th BoS Course Curriculum - B.tech CSEAnonymous 9etQKwWÎncă nu există evaluări
- Capr-I En229Document13 paginiCapr-I En229Anonymous WglGv0GÎncă nu există evaluări
- Cebu Technological University: Republic of The PhilippinesDocument2 paginiCebu Technological University: Republic of The PhilippinesEngelbert RespuestoÎncă nu există evaluări