S-ar putea să vă placă și
- Porras Militares2Document11 paginiPorras Militares2Erik Jimenez77% (86)
- El Quebrantador de Juramentos - Nick KymeDocument1.166 paginiEl Quebrantador de Juramentos - Nick KymerorroÎncă nu există evaluări
- La Hi Power de Accion RapidaDocument11 paginiLa Hi Power de Accion RapidaandresgbeltranÎncă nu există evaluări
- Todos Los Códigos de San AndreasDocument14 paginiTodos Los Códigos de San Andreasyuselysblanco8450% (2)
- 1 Análisis de La Diversidad Genética PDFDocument17 pagini1 Análisis de La Diversidad Genética PDFYair alberto Torres ortizÎncă nu există evaluări
- Corpusculo de BarrDocument2 paginiCorpusculo de BarrGladis Aimé Hernández DuránÎncă nu există evaluări
- AbcdeDocument3 paginiAbcdeRicardo Ramirez FloresÎncă nu există evaluări
- Distribución Probabilística HipergeométricaDocument1 paginăDistribución Probabilística HipergeométricacristinaÎncă nu există evaluări
- Modelos ProbabilísticosDocument7 paginiModelos ProbabilísticosAlex195BÎncă nu există evaluări
- Reglas de Juego - La Clave Del EscorpiónDocument4 paginiReglas de Juego - La Clave Del EscorpiónFlorencia FlegoÎncă nu există evaluări
- Analisis Sensorial 2Document4 paginiAnalisis Sensorial 2Laura CristanchoÎncă nu există evaluări
- Planteamiento Del ProblemaDocument6 paginiPlanteamiento Del ProblemaLidia MVÎncă nu există evaluări
- Trabajo EstadisticaDocument24 paginiTrabajo EstadisticaAlexandra Mancilla100% (1)
- Actividad 3 - ¡Juegue Usted!Document6 paginiActividad 3 - ¡Juegue Usted!AlejoÎncă nu există evaluări
- Relacion 41Document6 paginiRelacion 41Segundo Fidel Puerto GaravitoÎncă nu există evaluări
- Desarrollo de Los Ejercicios - Gustavo Vargas - CCAV SahagunDocument13 paginiDesarrollo de Los Ejercicios - Gustavo Vargas - CCAV SahagunHhãmnâ MönřöýÎncă nu există evaluări
- Analisis Sensorial 2Document4 paginiAnalisis Sensorial 2Sciacalidad AuditoresÎncă nu există evaluări
- Practica 2 EGODocument7 paginiPractica 2 EGOMichel JonathanÎncă nu există evaluări
- Para Trabajar Con Las Cartas ZenerDocument5 paginiPara Trabajar Con Las Cartas ZenerGabriel Abraham Arias Duran0% (1)
- Resueltos Genetica 2022-16-1Document63 paginiResueltos Genetica 2022-16-1Andres montañoÎncă nu există evaluări
- Práctica N 7Document8 paginiPráctica N 7jhenifer dayana chavez cantaÎncă nu există evaluări
- Medida de HeteroforiasDocument15 paginiMedida de Heteroforiasnadanada889100% (2)
- Articles-334252 Recurso 1Document14 paginiArticles-334252 Recurso 1isaac gallardo barahonaÎncă nu există evaluări
- Codenames Rules EsDocument8 paginiCodenames Rules EsLuisÎncă nu există evaluări
- 9.3 Coloracion en CamaronesDocument2 pagini9.3 Coloracion en CamaronesM.SALINASÎncă nu există evaluări
- Escala de AdiccionDocument3 paginiEscala de AdiccionRonny Viktor Durand Vera-PortocarreroÎncă nu există evaluări
- Plan Estratégico de Una Empresa de Servicios Tecnológicos 1Document153 paginiPlan Estratégico de Una Empresa de Servicios Tecnológicos 1Fabian UribeÎncă nu există evaluări
- Desarrollo Unidad 1Document13 paginiDesarrollo Unidad 1Fabian UribeÎncă nu există evaluări
- ACT 3 Mapa Conceptual - CORREGIDODocument5 paginiACT 3 Mapa Conceptual - CORREGIDOFabian UribeÎncă nu există evaluări
- Prototipo - Brazo Robotico - Arduino - Articulo - CorregidoDocument7 paginiPrototipo - Brazo Robotico - Arduino - Articulo - CorregidoFabian Uribe0% (1)
- La Robótica Educativa, Una Herramienta para La Enseñanza-Aprendizaje de Las Ciencias y Las TecnologíasDocument18 paginiLa Robótica Educativa, Una Herramienta para La Enseñanza-Aprendizaje de Las Ciencias y Las TecnologíasFabian UribeÎncă nu există evaluări
- Tesis Brazo RoboticoDocument26 paginiTesis Brazo RoboticoFabian UribeÎncă nu există evaluări
- José Casas, Jaime García y Fernando González - Guía Técnica para La Construcción de CuestionariosDocument12 paginiJosé Casas, Jaime García y Fernando González - Guía Técnica para La Construcción de CuestionariosFabian UribeÎncă nu există evaluări
- 1.5.3.6 Packet Tracer - Communicating in A Cyber WorldDocument4 pagini1.5.3.6 Packet Tracer - Communicating in A Cyber WorldFabian UribeÎncă nu există evaluări
- Lectura 1 Base PDFDocument15 paginiLectura 1 Base PDFjsantiago22129503Încă nu există evaluări
- 3.3.2.7 Packet Tracer - WEP WPA2 PSK WPA2 RADIUSDocument4 pagini3.3.2.7 Packet Tracer - WEP WPA2 PSK WPA2 RADIUSFabian Uribe100% (1)
- 2.5.2.6 Packet Tracer - Exploring File and Data EncryptionDocument4 pagini2.5.2.6 Packet Tracer - Exploring File and Data EncryptionFabian UribeÎncă nu există evaluări
- Granadas de Guerra Arma IiiDocument17 paginiGranadas de Guerra Arma IiiCarlos Sam100% (1)
- Tiro Policial - The Follow Through o El Seguimiento de La Acción. - Stock Armas PDFDocument4 paginiTiro Policial - The Follow Through o El Seguimiento de La Acción. - Stock Armas PDFMarcos FloresÎncă nu există evaluări
- Aprec. Sit. DN-5 2016 - Reunión Cmdtes. 24-Ene-16 Corregido Cn. Torrico VDocument24 paginiAprec. Sit. DN-5 2016 - Reunión Cmdtes. 24-Ene-16 Corregido Cn. Torrico Vcotna dptoiiiÎncă nu există evaluări
- Capitalismo Carrera de Armamentos y Comercio de ArmasDocument26 paginiCapitalismo Carrera de Armamentos y Comercio de ArmasBabeuf_87Încă nu există evaluări
- (Exsa) +seguridad ExplosivosDocument38 pagini(Exsa) +seguridad ExplosivosSan Patricio Sso EirlÎncă nu există evaluări
- Monografia Grupo 5 Medicina LegalDocument21 paginiMonografia Grupo 5 Medicina LegalDevora Antuanet Valdivia ValenciaÎncă nu există evaluări
- Ortner, Helmut - Sacco y Vanzetti. El Enemigo Extranjero (Anarquismo en PDF)Document306 paginiOrtner, Helmut - Sacco y Vanzetti. El Enemigo Extranjero (Anarquismo en PDF)Anarquismo en PDFÎncă nu există evaluări
- Tercera Tarea Forense Medicina Legal Lesiones Por Armas Blancas y de FuegoDocument4 paginiTercera Tarea Forense Medicina Legal Lesiones Por Armas Blancas y de FuegoWilson Jiménez MAÎncă nu există evaluări
- Presentacion Halloween InglesDocument11 paginiPresentacion Halloween InglesYuliana CardonaÎncă nu există evaluări
- Trabajo Tiro - AguuusDocument8 paginiTrabajo Tiro - AguuusCeleste GimenezÎncă nu există evaluări
- Reglas de Cash N GunDocument10 paginiReglas de Cash N GunFernando BarriosÎncă nu există evaluări
- Actividad 3 Tema 1 CriminalisticaDocument3 paginiActividad 3 Tema 1 CriminalisticaDiego ReyesÎncă nu există evaluări
- DeathWatch - FichaDocument2 paginiDeathWatch - FichaDaniel Barberi Romero100% (1)
- Comunidad Primitiva (Salvajismo)Document1 paginăComunidad Primitiva (Salvajismo)Gerardo100% (1)
- Guia de Trofeos de Uncharted: Drake's Fortune™ Remastered: IndiceDocument26 paginiGuia de Trofeos de Uncharted: Drake's Fortune™ Remastered: IndiceEllieÎncă nu există evaluări
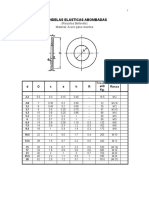
- Tablas de TornillosDocument30 paginiTablas de TornillosgabÎncă nu există evaluări
- Adi 635 Acta de Revista Del Parque de Armas 03dic2021Document3 paginiAdi 635 Acta de Revista Del Parque de Armas 03dic2021Alejandro Lopez GonzalezÎncă nu există evaluări
- AD&D MastersDocument272 paginiAD&D MastersMiguel ÁngelÎncă nu există evaluări
- 01 - Taking Her Innocence - Sam Crescent & Stacey EspinoDocument209 pagini01 - Taking Her Innocence - Sam Crescent & Stacey EspinoBiblioteca Cafe&libros&amigosÎncă nu există evaluări
- Uso de Explosivos en Obras de Ingeniería CivilDocument238 paginiUso de Explosivos en Obras de Ingeniería CivilAdrian Sanchez DorantesÎncă nu există evaluări
- Crónicas The Division 2 - Cap3 PDFDocument100 paginiCrónicas The Division 2 - Cap3 PDFjosue dario parra gonzalezÎncă nu există evaluări
- Artilleria de Marfil-David67Document29 paginiArtilleria de Marfil-David67davidces100% (2)
- Informe Evidencias Fisicas-CriminalisticaDocument12 paginiInforme Evidencias Fisicas-Criminalisticakatiuska100% (1)
- Bazares FF XIIDocument28 paginiBazares FF XIIvictor marinÎncă nu există evaluări
- Catalogo de ExplosivosDocument7 paginiCatalogo de ExplosivosbilbmaÎncă nu există evaluări