S-ar putea să vă placă și
- Resumen El Misterio Del AguilaDocument2 paginiResumen El Misterio Del AguilaGera Cabrera0% (1)
- Manual Senalamiento Vial Dispositivos SeguridadDocument770 paginiManual Senalamiento Vial Dispositivos SeguridadSergio Salazar100% (1)
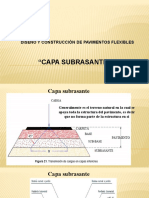
- Presentacion SubrasanteDocument10 paginiPresentacion SubrasanteGera CabreraÎncă nu există evaluări
- Manual Del Constructor Cemex PDFDocument102 paginiManual Del Constructor Cemex PDFAniieë WhiiteëÎncă nu există evaluări
- Calidad de Materiales Petreos en Carpetas Asf.Document5 paginiCalidad de Materiales Petreos en Carpetas Asf.Gera CabreraÎncă nu există evaluări
- 09 Presas de MamposteriaDocument12 pagini09 Presas de MamposteriaAlejandro OrtizÎncă nu există evaluări
- Presentacion SubrasanteDocument10 paginiPresentacion SubrasanteGera CabreraÎncă nu există evaluări
- Clase 01 Principios TermodinamicaDocument28 paginiClase 01 Principios TermodinamicaGera CabreraÎncă nu există evaluări
- Comparativos en InglésDocument4 paginiComparativos en InglésCesar Diego Barranzuela FiestasÎncă nu există evaluări
- N Pry Car 10 03 002 01Document13 paginiN Pry Car 10 03 002 01Gera CabreraÎncă nu există evaluări
- Plan de VidaDocument1 paginăPlan de VidaGera CabreraÎncă nu există evaluări
- 09 Presas de MamposteriaDocument12 pagini09 Presas de MamposteriaAlejandro OrtizÎncă nu există evaluări
- Principios GeometriaDocument14 paginiPrincipios GeometriaSinoe MeriamÎncă nu există evaluări
- Manual 7pasos AristidesvaraDocument451 paginiManual 7pasos Aristidesvaralisset_10100% (4)
- 09 Presas de MamposteriaDocument12 pagini09 Presas de MamposteriaAlejandro OrtizÎncă nu există evaluări
- Manual Autocad 2009 (Bidimensional) Totalmente en EspañolDocument183 paginiManual Autocad 2009 (Bidimensional) Totalmente en Españollink064100% (10)
- Programacion ObraDocument27 paginiProgramacion ObraEnrique EnriqueÎncă nu există evaluări
- Metodo de MaltusDocument5 paginiMetodo de MaltusGera CabreraÎncă nu există evaluări
- Bdo 025Document156 paginiBdo 025Gera CabreraÎncă nu există evaluări
- Desarrollo de La Informatica en La Sociedad Inf.Document1 paginăDesarrollo de La Informatica en La Sociedad Inf.Gera CabreraÎncă nu există evaluări
- Proceso ConstructivoDocument9 paginiProceso ConstructivoGera CabreraÎncă nu există evaluări
- Ejercios de AlgebraDocument3 paginiEjercios de AlgebraGera CabreraÎncă nu există evaluări
- Cuento - La Gallina DegolladaDocument3 paginiCuento - La Gallina DegolladaScheila StahlÎncă nu există evaluări
- Tabulador de Pu CDMX 2016 PDFDocument276 paginiTabulador de Pu CDMX 2016 PDFGILBERTOÎncă nu există evaluări
- 09 Presas de MamposteriaDocument12 pagini09 Presas de MamposteriaAlejandro OrtizÎncă nu există evaluări
- 21 Errores de Lectura Que Nunca Debes Cometer PDFDocument16 pagini21 Errores de Lectura Que Nunca Debes Cometer PDFBelis PeruÎncă nu există evaluări
- Comandos Básicos de Auto CAD InglesDocument7 paginiComandos Básicos de Auto CAD InglesGera CabreraÎncă nu există evaluări
- Deber 1 de 2 PARTE Die FreundenDocument23 paginiDeber 1 de 2 PARTE Die FreundenGabriela Miranda BañuelosÎncă nu există evaluări
- Requisitos para ObraDocument6 paginiRequisitos para ObraGera CabreraÎncă nu există evaluări
- Sem 2 - Sesión 5 Gráfica Definida Por Partes - AplicacionesDocument20 paginiSem 2 - Sesión 5 Gráfica Definida Por Partes - AplicacionesCHRISTIAN EDUARDO CUADROS PORTUGALÎncă nu există evaluări
- Introducción A Vectores en R3Document16 paginiIntroducción A Vectores en R3Anonymous JzgGawdoÎncă nu există evaluări
- Actividad de Puntos Evaluables - Escenario 6Document3 paginiActividad de Puntos Evaluables - Escenario 6Fercho contoÎncă nu există evaluări
- Proyecto MatematicaDocument33 paginiProyecto Matematicavivian100% (1)
- Tema 4.2 FGV - Métodos de CálculoDocument38 paginiTema 4.2 FGV - Métodos de Cálculosofia rodriguezÎncă nu există evaluări
- Derivadas Ejercicios A Desarrollar - Estudiante 1Document8 paginiDerivadas Ejercicios A Desarrollar - Estudiante 1luis ballesterosÎncă nu există evaluări
- Notas CombinatoriaDocument13 paginiNotas CombinatoriadezÎncă nu există evaluări
- Electromagnetismo - Algebra VectorialDocument55 paginiElectromagnetismo - Algebra VectorialJharoloTÎncă nu există evaluări
- Calculo Integral C3 - 2.3.1-2.3.2-2.3.3Document17 paginiCalculo Integral C3 - 2.3.1-2.3.2-2.3.3Manolo QuezadaÎncă nu există evaluări
- Razón de CambioDocument10 paginiRazón de CambioWilmer Velasco Chanta100% (1)
- Ecuaciones de LagrangeDocument10 paginiEcuaciones de LagrangeAbel Antony Muñoz SolorzanoÎncă nu există evaluări
- Medidas de Posición: Maestría en Finanzas PúblicasDocument18 paginiMedidas de Posición: Maestría en Finanzas Públicaspablo garcia garciaÎncă nu există evaluări
- Guia 6: Funciones. SistemasDocument6 paginiGuia 6: Funciones. SistemasSandra RedaelliÎncă nu există evaluări
- MA-2113 Guía Axel Voza 2Document9 paginiMA-2113 Guía Axel Voza 2Alexander Bonilla ParraÎncă nu există evaluări
- Análisis Vectorial IDocument23 paginiAnálisis Vectorial IkevinÎncă nu există evaluări
- Teoria de Estudio-Ecuacion Eikonal PDFDocument54 paginiTeoria de Estudio-Ecuacion Eikonal PDFSebastian Soto PerdomoÎncă nu există evaluări
- CG - CAF 1 - Semana 11Document17 paginiCG - CAF 1 - Semana 11Jose SunWukongÎncă nu există evaluări
- Solución Ecuaciones DiferencialesDocument6 paginiSolución Ecuaciones DiferencialesjamesvalderramaÎncă nu există evaluări
- Tratamiento de Señales DigitalesDocument6 paginiTratamiento de Señales DigitalesA.JÎncă nu există evaluări
- Normalidad MultivarianteDocument21 paginiNormalidad MultivarianteErick BarreraÎncă nu există evaluări
- Ejercicios de Metodos Numericos OcrDocument199 paginiEjercicios de Metodos Numericos OcrUriel OlveraÎncă nu există evaluări
- ACA 1 Algebra LinealDocument17 paginiACA 1 Algebra LinealJohan Esteban Orjuela MoyanoÎncă nu există evaluări
- Probabilidades MATS008Document19 paginiProbabilidades MATS008Esteffany Alejandra Barraza GonzalezÎncă nu există evaluări
- Notas de Algebra Lineal MathematicaDocument112 paginiNotas de Algebra Lineal MathematicaBruno Roldan100% (1)
- Primer Examen Parcial de Ecuaciones DiferencialesDocument8 paginiPrimer Examen Parcial de Ecuaciones DiferencialesEver Morales YujraÎncă nu există evaluări
- 24) IntegralesSustTrigDocument6 pagini24) IntegralesSustTrigJose Armando Ramos UrbinaÎncă nu există evaluări
- Posicion Velocidad y Aceleracion en Coordenadas ToroidalesDocument16 paginiPosicion Velocidad y Aceleracion en Coordenadas ToroidalesRicardo Ballon TitoÎncă nu există evaluări
- Derivadas de Primer NivelDocument8 paginiDerivadas de Primer NivelahalonsoÎncă nu există evaluări
- Ejercicios de MateDocument50 paginiEjercicios de MateJhasmany FtÎncă nu există evaluări
- Sintesis de Programa Teorico PracticoDocument3 paginiSintesis de Programa Teorico PracticoParis Andrei Gonzalez PratzÎncă nu există evaluări