S-ar putea să vă placă și
- Configuración de Planes PCQDocument56 paginiConfiguración de Planes PCQChristyan LeonÎncă nu există evaluări
- Mitos Portuguesa C 15 El-EspantoDocument2 paginiMitos Portuguesa C 15 El-EspantoChristyan LeonÎncă nu există evaluări
- Educación Alimentaria y Nutricional Ensayo, Fracelis MontillaDocument3 paginiEducación Alimentaria y Nutricional Ensayo, Fracelis MontillaChristyan LeonÎncă nu există evaluări
- Cisco 7941 ConfiguracionDocument23 paginiCisco 7941 ConfiguracionChristyan LeonÎncă nu există evaluări
- Carta de Fallas y SolucionesDocument12 paginiCarta de Fallas y SolucionesChristyan LeonÎncă nu există evaluări
- Control de Temperatura HornosDocument158 paginiControl de Temperatura HornosChristyan LeonÎncă nu există evaluări
- Acfrogdxcazmxk 2lkomq5ndd5dxlmjm83gyhzdzfoszcpaftgh57a8jryffsziwe5ntbj-Xjymw0rr-2ijuw2wkiwh7bhro3c29srgzcaolq Wwrfsyr8ktroeouxxuclz5vc9lctbifeg6km XDocument10 paginiAcfrogdxcazmxk 2lkomq5ndd5dxlmjm83gyhzdzfoszcpaftgh57a8jryffsziwe5ntbj-Xjymw0rr-2ijuw2wkiwh7bhro3c29srgzcaolq Wwrfsyr8ktroeouxxuclz5vc9lctbifeg6km XChristyan LeonÎncă nu există evaluări
- El Monitoreo y La Retroalimentación de Los Aprendizajes Es Un Proceso Pedagógico Ampliamente InvestigadoDocument14 paginiEl Monitoreo y La Retroalimentación de Los Aprendizajes Es Un Proceso Pedagógico Ampliamente InvestigadoChristyan LeonÎncă nu există evaluări
- Configurar Vlan Superstack 3 Switch 4200 SeriesDocument3 paginiConfigurar Vlan Superstack 3 Switch 4200 SeriesChristyan LeonÎncă nu există evaluări
- Ejemplo Cambio de Capa 2 A Capa 3Document4 paginiEjemplo Cambio de Capa 2 A Capa 3Christyan LeonÎncă nu există evaluări
- Apuntes Curso Mauricio CáceresDocument37 paginiApuntes Curso Mauricio CáceresChristyan LeonÎncă nu există evaluări
- Redes de Polarización Del BJT Y DEL EMOSFETDocument24 paginiRedes de Polarización Del BJT Y DEL EMOSFETjuan piñerosÎncă nu există evaluări
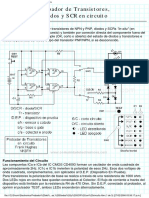
- Semiconductores de Potencia (SCR)Document5 paginiSemiconductores de Potencia (SCR)Víctor Eduardo Anaya PinillosÎncă nu există evaluări
- Transistores de Efecto de Campo JfetDocument3 paginiTransistores de Efecto de Campo JfetIkerGamer 051109Încă nu există evaluări
- 10 Preguntas de La Asignatura de Electrónica PropuestasDocument3 pagini10 Preguntas de La Asignatura de Electrónica PropuestasALVARO MUÑOZ50% (2)
- Lab 4Document10 paginiLab 4Luis Carlos Apraez PantojaÎncă nu există evaluări
- REPORTE 1lolDocument16 paginiREPORTE 1lolIrving Cobain100% (1)
- Informe N°08 LAB - CITRO ..Document12 paginiInforme N°08 LAB - CITRO ..TomoyoKisekoÎncă nu există evaluări
- H.T #9-Mediciones en El Transistor BJTDocument4 paginiH.T #9-Mediciones en El Transistor BJTLuis Alberto Zapata OjedaÎncă nu există evaluări
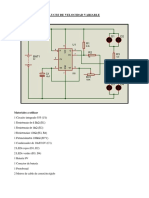
- Luces de Velocidad VariableDocument2 paginiLuces de Velocidad VariablejavichocixÎncă nu există evaluări
- Divisor de Voltaje y Mosfet PDFDocument38 paginiDivisor de Voltaje y Mosfet PDFGEOVANNY100% (2)
- Circuito Integrado PresentacionDocument34 paginiCircuito Integrado PresentacionDaniela Moreno GonzalezÎncă nu există evaluări
- Preinforme 1, Transistores BJTDocument4 paginiPreinforme 1, Transistores BJTGüerrëröYöylëÎncă nu există evaluări
- Unidad 1 Introducción A La Electrónica de PotenciaDocument17 paginiUnidad 1 Introducción A La Electrónica de PotenciaLeinner Said Redondo MenesesÎncă nu există evaluări
- EPMEC Problemas01 Calculos TermicosDocument7 paginiEPMEC Problemas01 Calculos TermicosFelix BenzanÎncă nu există evaluări
- Transistor BJT PDFDocument5 paginiTransistor BJT PDFSOL GABRIEL RAMIREZ BECERRAÎncă nu există evaluări
- Ampliable Con Operacional..Tarki 1Document5 paginiAmpliable Con Operacional..Tarki 1Guille SoriaÎncă nu există evaluări
- ProbadorTransistores DiodosDocument3 paginiProbadorTransistores Diodosvelasquez diazÎncă nu există evaluări
- Practica #1 Curva Caracteristica Del BJTDocument7 paginiPractica #1 Curva Caracteristica Del BJTXavier Ni OlaÎncă nu există evaluări
- Complemento Guia TransistoresDocument3 paginiComplemento Guia Transistoresclugo78Încă nu există evaluări
- Comprobador de Transistores 2Document2 paginiComprobador de Transistores 2Freddy Enrique Luna MirabalÎncă nu există evaluări
- Registros, Memorias y Logica ProgramableDocument9 paginiRegistros, Memorias y Logica ProgramableJosue ChavarriaÎncă nu există evaluări
- DiodosDocument21 paginiDiodosSergio Moreno MartìnezÎncă nu există evaluări
- Electronica de Potencia Componente PracticoDocument35 paginiElectronica de Potencia Componente PracticoEsteban Barragán Tafur100% (1)
- Instituto Tecnológico de Orizaba: ANTOLOGIA Tema 5 "Transistores de Efecto de Campo"Document29 paginiInstituto Tecnológico de Orizaba: ANTOLOGIA Tema 5 "Transistores de Efecto de Campo"Ahmed RamírezÎncă nu există evaluări
- Fabricacion de Chips 1234803827589926 2Document42 paginiFabricacion de Chips 1234803827589926 2DavidZilloo SalazarÎncă nu există evaluări
- Manual SMARTDocument20 paginiManual SMARTPablo EspinosaÎncă nu există evaluări
- Practica 5 DispoDocument16 paginiPractica 5 DispoAndrés JassoÎncă nu există evaluări
- Tecnologia de Montaje Superficial - Encapsulados de C.I SMDDocument2 paginiTecnologia de Montaje Superficial - Encapsulados de C.I SMDGeovanny SanJuanÎncă nu există evaluări
- Catalogo ElectronicoDocument139 paginiCatalogo ElectronicoLuis da Costa100% (1)
- Cuestionario y ConclusionesDocument7 paginiCuestionario y ConclusionesTania Romero AcuñaÎncă nu există evaluări