S-ar putea să vă placă și
- Predictivo Adaptativo RobustoDocument24 paginiPredictivo Adaptativo RobustoGeorgeMarrinesÎncă nu există evaluări
- Estabilidad de SistemaDocument1 paginăEstabilidad de SistemaGeorgeMarrinesÎncă nu există evaluări
- Biografias LabviewDocument2 paginiBiografias LabviewGeorgeMarrinesÎncă nu există evaluări
- Todo Lo Que Deberías Desactivar Si Te Preocupa Tu Privacidad en Windows 10Document5 paginiTodo Lo Que Deberías Desactivar Si Te Preocupa Tu Privacidad en Windows 10GeorgeMarrinesÎncă nu există evaluări
- Examen Auditores Internos (A)Document5 paginiExamen Auditores Internos (A)Novita_100100% (1)
- Amortiguadores Monotubo y BitubO 55Document14 paginiAmortiguadores Monotubo y BitubO 55Daniel Pinto CuevasÎncă nu există evaluări
- Presentación Martillo Hidraulico BARRICK - LAGUNAS NORTEDocument21 paginiPresentación Martillo Hidraulico BARRICK - LAGUNAS NORTEVíctor Hugo Moreno SánchezÎncă nu există evaluări
- Realizando Comparación Remota Entre Ambientes SAPDocument7 paginiRealizando Comparación Remota Entre Ambientes SAPluislokox100% (1)
- PDF ContableTeclabDocument9 paginiPDF ContableTeclabJuanE.GarcíaMontovioÎncă nu există evaluări
- Informe T. de Superposicion-Reciprocidad.Document8 paginiInforme T. de Superposicion-Reciprocidad.Henry Rivas LauraÎncă nu există evaluări
- Las Soluciones de RR - HHDocument11 paginiLas Soluciones de RR - HHMayquelbernalÎncă nu există evaluări
- PIP Canal Carahuanga ObsDocument96 paginiPIP Canal Carahuanga ObsMelissa Alva Lazaro100% (1)
- Gwo BarceloneDocument7 paginiGwo BarceloneYahya Moughlia100% (1)
- Tarea 2 Mapa ConceptualDocument2 paginiTarea 2 Mapa ConceptualAitana PaolaÎncă nu există evaluări
- Xze2 Neumaticos MichelinDocument2 paginiXze2 Neumaticos MichelinMario Eduardo Hishikawa AscencioÎncă nu există evaluări
- Matriz - MortalidadDocument1 paginăMatriz - MortalidadPercy ChiaraÎncă nu există evaluări
- Plan de Desarrollo Unificado de CotaDocument102 paginiPlan de Desarrollo Unificado de CotaPhilip AndersonÎncă nu există evaluări
- BembosDocument15 paginiBembosGris LuceroÎncă nu există evaluări
- UNIDAD II - ActuadoresDocument52 paginiUNIDAD II - ActuadoresEstefania DorantesÎncă nu există evaluări
- Informe de Elaboracion de Un Transformador EnriqueDocument18 paginiInforme de Elaboracion de Un Transformador EnriqueeloyÎncă nu există evaluări
- Catalogo CoelDocument19 paginiCatalogo CoelINGENIERIA MECANICA Y DE CONTROLÎncă nu există evaluări
- Metodología para Un Curso-Taller de Manejo Integrado de Plagas en La PapaDocument9 paginiMetodología para Un Curso-Taller de Manejo Integrado de Plagas en La PapaJorge Luis Alonso G.Încă nu există evaluări
- Proceso de Maquinado TorneadoDocument34 paginiProceso de Maquinado TorneadoAlejandro MartinezÎncă nu există evaluări
- Catalogo Jonnesway2016Document63 paginiCatalogo Jonnesway2016Fernando VargasÎncă nu există evaluări
- Resumen N1Document4 paginiResumen N1Andres Martin CatalanÎncă nu există evaluări
- Estudio de Suelos - La TinguiñaDocument56 paginiEstudio de Suelos - La TinguiñaPatricia CahuanaÎncă nu există evaluări
- BiolixiviaciónDocument1 paginăBiolixiviaciónhilda elisaÎncă nu există evaluări
- ABB 01 Interruptor AutomaticoDocument320 paginiABB 01 Interruptor Automaticojjurado183Încă nu există evaluări
- Cómo Cambiar - Bobina de Encendido - Skoda Fabia 6Y5 - Guía de SustituciónDocument10 paginiCómo Cambiar - Bobina de Encendido - Skoda Fabia 6Y5 - Guía de Sustitucióndaniel magallanesÎncă nu există evaluări
- Nesitelco Ltda: Mantenimiento Correctivo Y Preventivo BtsDocument0 paginiNesitelco Ltda: Mantenimiento Correctivo Y Preventivo BtsPabloÎncă nu există evaluări
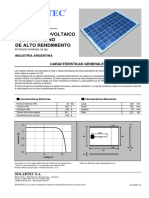
- SolartecDocument1 paginăSolartecSyd BarrettÎncă nu există evaluări
- Informe Final t3Document209 paginiInforme Final t3rosa elvira abanto albarranÎncă nu există evaluări
- Guía de Actividades y Rubrica de Evaluación - Paso 2 - Desarrollar El Software de MicroprocesadoresDocument15 paginiGuía de Actividades y Rubrica de Evaluación - Paso 2 - Desarrollar El Software de MicroprocesadoresAlexander Guaitero MojicaÎncă nu există evaluări
- Pasadores y Barras de AnclajeDocument5 paginiPasadores y Barras de Anclajezeny951013Încă nu există evaluări