S-ar putea să vă placă și
- Christian Terwiesch Chat GTPDocument26 paginiChristian Terwiesch Chat GTPZachary RogersÎncă nu există evaluări
- Different Approaches For Solving Location ProblemsDocument30 paginiDifferent Approaches For Solving Location ProblemsAbhishek PadhyeÎncă nu există evaluări
- Operations ManagementDocument80 paginiOperations ManagementgopalsakalaÎncă nu există evaluări
- Productivity and Reliability-Based Maintenance Management, Second EditionDe la EverandProductivity and Reliability-Based Maintenance Management, Second EditionÎncă nu există evaluări
- Principles of Lean Thinking Rev D 2004Document39 paginiPrinciples of Lean Thinking Rev D 2004sprathÎncă nu există evaluări
- Capacity PlanningDocument40 paginiCapacity PlanningNguyen LinhÎncă nu există evaluări
- Capacity PlanningDocument16 paginiCapacity PlanningAnadi Ranjan100% (1)
- Strategic Benchmarking: Learn From The Best CompaniesDocument5 paginiStrategic Benchmarking: Learn From The Best Companiesnasif_khawla2962100% (3)
- Lecture 2 PDFDocument16 paginiLecture 2 PDFsatheeshsep24Încă nu există evaluări
- Critical Path Method A Complete Guide - 2020 EditionDe la EverandCritical Path Method A Complete Guide - 2020 EditionÎncă nu există evaluări
- Opportunity Cost, Marginal Analysis, RationalismDocument33 paginiOpportunity Cost, Marginal Analysis, Rationalismbalram nayakÎncă nu există evaluări
- Pareto Principle: "The Vital Few and Trivial Many Rule"Document24 paginiPareto Principle: "The Vital Few and Trivial Many Rule"ankitvsinghÎncă nu există evaluări
- Theory of Constraints: Drum Buffer RopeDocument29 paginiTheory of Constraints: Drum Buffer RopeMohit SrivastavaÎncă nu există evaluări
- Production Planning and ControlDocument22 paginiProduction Planning and ControlPravah Shukla100% (1)
- THE MISSING TOOL For Maintenance & MRO Inventory ControlDocument11 paginiTHE MISSING TOOL For Maintenance & MRO Inventory ControlLLÎncă nu există evaluări
- Lecture 3 - Production ConceptsDocument16 paginiLecture 3 - Production ConceptsFatimaÎncă nu există evaluări
- TOCDocument17 paginiTOCpvamanÎncă nu există evaluări
- 1898 Ford Operations ManagementDocument8 pagini1898 Ford Operations ManagementSanthoshAnvekarÎncă nu există evaluări
- Lot Sizing PDFDocument30 paginiLot Sizing PDFSyeda SidraÎncă nu există evaluări
- Enterprise Dynamics TutorialDocument66 paginiEnterprise Dynamics TutorialBaracÎncă nu există evaluări
- Value Stream Mapping Examples For Different IndustriesDocument19 paginiValue Stream Mapping Examples For Different IndustriesShane Mc GillycuddyÎncă nu există evaluări
- Toc Seminar FinalDocument23 paginiToc Seminar FinalSagar Babar100% (1)
- Chase Method of Aggregate PlanningDocument23 paginiChase Method of Aggregate Planningkaushalsingh20Încă nu există evaluări
- Lot Sizing in MRPDocument49 paginiLot Sizing in MRPGauri Singh100% (1)
- LP FormulationDocument36 paginiLP FormulationSachin YadavÎncă nu există evaluări
- Quality Management System Process A Complete Guide - 2020 EditionDe la EverandQuality Management System Process A Complete Guide - 2020 EditionÎncă nu există evaluări
- Applications of Throughput Accounting Ratio in A Multiproduct Entity or SituationDocument9 paginiApplications of Throughput Accounting Ratio in A Multiproduct Entity or SituationTalla MokshithaÎncă nu există evaluări
- Chapter 1. Introduction: 1.1. BackgroundDocument92 paginiChapter 1. Introduction: 1.1. BackgroundSanjay KmrÎncă nu există evaluări
- Manual Work Design: From: Niebel's Methods, Standards, and Work Design, Twelfth EditionDocument147 paginiManual Work Design: From: Niebel's Methods, Standards, and Work Design, Twelfth EditionzoerydasÎncă nu există evaluări
- Linear Program 1Document52 paginiLinear Program 1ChaOs_Air75% (4)
- 0000004421-Chap 9Document42 pagini0000004421-Chap 9Srinivas AmaraÎncă nu există evaluări
- Drivers of Green ManufacturingDocument18 paginiDrivers of Green Manufacturinggautam_lele_1Încă nu există evaluări
- 2013-4-16 - P Using Lean Manufacturing Techniques To Improve Production Efficiency in The Ready Wear Industry and A Case Study PDocument7 pagini2013-4-16 - P Using Lean Manufacturing Techniques To Improve Production Efficiency in The Ready Wear Industry and A Case Study Phemlata2014Încă nu există evaluări
- Continuous Improvement A Complete Guide - 2019 EditionDe la EverandContinuous Improvement A Complete Guide - 2019 EditionÎncă nu există evaluări
- Lecture 02 - Inventory ManagementDocument69 paginiLecture 02 - Inventory ManagementBharath BalasubramanianÎncă nu există evaluări
- KPIs Energy EfficiencyDocument6 paginiKPIs Energy Efficiency3238NDÎncă nu există evaluări
- ProModel User GuideDocument646 paginiProModel User GuideRandy Mantilla CárdenasÎncă nu există evaluări
- Initial Plan For Sonoco Improvement Basic Notes: Example of A Matrix To Prioritise The Line For Performance ImprovementDocument5 paginiInitial Plan For Sonoco Improvement Basic Notes: Example of A Matrix To Prioritise The Line For Performance ImprovementDamianÎncă nu există evaluări
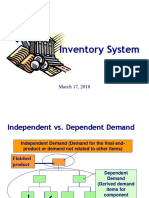
- 8 Inventory SystemsDocument48 pagini8 Inventory SystemsAngeline Nicole RegaladoÎncă nu există evaluări
- 4.2 Process CapacityDocument11 pagini4.2 Process Capacitysaheb167Încă nu există evaluări
- 53B Intro To TPM Six Big LossesDocument32 pagini53B Intro To TPM Six Big Lossesechsan dwi nugrohoÎncă nu există evaluări
- Best Practices For Inventory ReductionDocument36 paginiBest Practices For Inventory ReductionSachin Panpatil50% (2)
- Chapter 3 Work Flow and Batch Processing MNDocument87 paginiChapter 3 Work Flow and Batch Processing MNSaied Aly Salamah0% (1)
- CMU 70-371 Operations Management Assignment 1Document2 paginiCMU 70-371 Operations Management Assignment 1Adam LÎncă nu există evaluări
- 7.chapter 5 Capacity PlanningDocument16 pagini7.chapter 5 Capacity Planningopio jamesÎncă nu există evaluări
- Inventory Reorder MethodsDocument26 paginiInventory Reorder MethodsmragarwalÎncă nu există evaluări
- Ford Production SystemDocument4 paginiFord Production Systempravit08Încă nu există evaluări
- Project Report On Maynard Operation Sequence TechniqueDocument9 paginiProject Report On Maynard Operation Sequence TechniqueEditor IJTSRDÎncă nu există evaluări
- Inventory Management - Lecture 15.04.2015Document56 paginiInventory Management - Lecture 15.04.2015Asia Oleśków SzłapkaÎncă nu există evaluări
- Dr. Noor Session On Problem Solving Aug 2018Document43 paginiDr. Noor Session On Problem Solving Aug 2018shaziafirdoosÎncă nu există evaluări
- Lean Manufacturing 2014Document5 paginiLean Manufacturing 2014api-366590421Încă nu există evaluări
- Material ManagementDocument29 paginiMaterial ManagementJennifer Padilla Juaneza100% (1)
- Chapter 3: Process and Capacity AnalysisDocument15 paginiChapter 3: Process and Capacity AnalysisAnugragha SundarÎncă nu există evaluări
- Theory ConstraintsDocument5 paginiTheory ConstraintsKaren Kate MarzoÎncă nu există evaluări
- Lect 12 EOQ SCMDocument38 paginiLect 12 EOQ SCMApporva MalikÎncă nu există evaluări
- Babalola2019 PDFDocument33 paginiBabalola2019 PDFMatt SlowikowskiÎncă nu există evaluări
- Operations Intelligence Complete Self-Assessment GuideDe la EverandOperations Intelligence Complete Self-Assessment GuideÎncă nu există evaluări
- SMED single minute exchange of die A Complete Guide - 2019 EditionDe la EverandSMED single minute exchange of die A Complete Guide - 2019 EditionÎncă nu există evaluări
- 11 Foods That Lower CholesterolDocument5 pagini11 Foods That Lower CholesterolsleshiÎncă nu există evaluări
- Solution Chapter 7Document2 paginiSolution Chapter 7sleshiÎncă nu există evaluări
- Financial Management Assignment (2009)Document5 paginiFinancial Management Assignment (2009)sleshiÎncă nu există evaluări
- Ict Infrastructure Assesment of Amhara Development AssociationDocument3 paginiIct Infrastructure Assesment of Amhara Development AssociationsleshiÎncă nu există evaluări
- Chapter 1 - Financial InstitutionsDocument16 paginiChapter 1 - Financial InstitutionssleshiÎncă nu există evaluări
- A Poultry Feed Formulation SpreadsheetDocument5 paginiA Poultry Feed Formulation Spreadsheetsleshi75% (4)
- Haramaya University: College of Business and EconomicsDocument48 paginiHaramaya University: College of Business and EconomicsYG DEÎncă nu există evaluări
- ORDocument17 paginiORBabitha DhanaÎncă nu există evaluări
- Operations Research I: Dr. Bill CorleyDocument147 paginiOperations Research I: Dr. Bill Corleydiyar cheÎncă nu există evaluări
- Engineering Optimization, 2nd Ed, Wiley (2006), 0471558141Document681 paginiEngineering Optimization, 2nd Ed, Wiley (2006), 0471558141Shivani Gupta100% (1)
- Big M MethodDocument12 paginiBig M MethodEshan MaheshwariÎncă nu există evaluări
- The Two-Phase Simplex MethodDocument22 paginiThe Two-Phase Simplex Methodbhoopesh2688Încă nu există evaluări
- Operation Research Important QueDocument28 paginiOperation Research Important QuerijaÎncă nu există evaluări
- Bmath 2 PDFDocument8 paginiBmath 2 PDFRobert Jayson UyÎncă nu există evaluări
- Objectives Questions Unit 1 CHP 1-Introduction To Operations Research IDocument27 paginiObjectives Questions Unit 1 CHP 1-Introduction To Operations Research IamishaÎncă nu există evaluări
- Unit 1 Linear Programming ProblemDocument56 paginiUnit 1 Linear Programming ProblemSofoniasÎncă nu există evaluări
- CH 03 Simplex Method and Sensitivity AnalysisDocument121 paginiCH 03 Simplex Method and Sensitivity AnalysisAura fairuzÎncă nu există evaluări
- Quizzes F97Document46 paginiQuizzes F97LudovikÎncă nu există evaluări
- Lecture 5: Big-M Method and Two-Phase Method: Lecturer: Lily PANDocument9 paginiLecture 5: Big-M Method and Two-Phase Method: Lecturer: Lily PANLauraÎncă nu există evaluări
- 3.1 Transportation ProblemDocument16 pagini3.1 Transportation ProblemPreethiÎncă nu există evaluări
- Part IB - Optimisation: DefinitionsDocument7 paginiPart IB - Optimisation: DefinitionsndndbshxÎncă nu există evaluări
- Linear and Multiobjective Programming With Fuzzy Stochastic ExtensionsDocument103 paginiLinear and Multiobjective Programming With Fuzzy Stochastic ExtensionsKharolin MauÎncă nu există evaluări
- 21529sm Finalnew Vol2 Cp10Document80 pagini21529sm Finalnew Vol2 Cp10Bint e YameenÎncă nu există evaluări
- BBA Course SyllabusDocument37 paginiBBA Course SyllabusK18376 67381KÎncă nu există evaluări
- Lesson Plan NBA-Operations ResearchDocument19 paginiLesson Plan NBA-Operations ResearchsunilmeÎncă nu există evaluări
- Assignment Model Approach To Ma1Document8 paginiAssignment Model Approach To Ma1Nella GbenobaÎncă nu există evaluări
- Operation Research Lecture NotesDocument119 paginiOperation Research Lecture NotesCerebro King100% (1)
- MMS Syllabus University of MumbaiDocument60 paginiMMS Syllabus University of MumbaiDipen Ashokkumar KadamÎncă nu există evaluări
- Linear Programming: Model Formulation and Graphical SolutionDocument6 paginiLinear Programming: Model Formulation and Graphical SolutionDuaa ZehraÎncă nu există evaluări
- Project Report: Dietary Requirement For Children Between 4-6 YearsDocument9 paginiProject Report: Dietary Requirement For Children Between 4-6 YearsDEBOPRIYO ROYÎncă nu există evaluări
- Ques 2.20Document46 paginiQues 2.20AkshatAgarwal0% (1)
- Mtse - 04.03.14Document94 paginiMtse - 04.03.14santhosh90mechÎncă nu există evaluări
- Special Cases:: - Unbounded Solution: - Multiple OptimalDocument38 paginiSpecial Cases:: - Unbounded Solution: - Multiple OptimalAffu ShaikÎncă nu există evaluări
- CastelliDocument55 paginiCastelliPranit BhagatÎncă nu există evaluări
- Topic23 3p3 Galvin 2017 Short PDFDocument32 paginiTopic23 3p3 Galvin 2017 Short PDFIts meh SushiÎncă nu există evaluări
- Fu 2014Document90 paginiFu 2014David Esteban Meneses RendicÎncă nu există evaluări