S-ar putea să vă placă și
- tp4 PDFDocument13 paginitp4 PDFGodo SánchezÎncă nu există evaluări
- Ejemplo de Un Control en CascadaDocument5 paginiEjemplo de Un Control en CascadaJuan perezÎncă nu există evaluări
- CertamenCto MaqDocument2 paginiCertamenCto MaqGustavo HunterÎncă nu există evaluări
- Informe Practica 2 On-Off TemperaturaDocument7 paginiInforme Practica 2 On-Off TemperaturaLimbert ToledoÎncă nu există evaluări
- Cohen Coon EjemploDocument8 paginiCohen Coon EjemploFer Lartiga VentocillaÎncă nu există evaluări
- Transductores de humedad y pHDocument5 paginiTransductores de humedad y pHMarco Quispe HuamanÎncă nu există evaluări
- Analizador de Consumo Electrico Con Labview para Verificar El Consumo A Corto y Largo Plazo en Instalacion DomiciliaresDocument5 paginiAnalizador de Consumo Electrico Con Labview para Verificar El Consumo A Corto y Largo Plazo en Instalacion DomiciliaresJuan GuamanÎncă nu există evaluări
- Estación de PresiónDocument8 paginiEstación de PresiónAntonioÎncă nu există evaluări
- Diseño y Construcción de Un Tacómetro Digital Mediante El Uso de Una Placa ArduinoDocument2 paginiDiseño y Construcción de Un Tacómetro Digital Mediante El Uso de Una Placa ArduinoBobbyÎncă nu există evaluări
- Selección del refrigerante adecuado para sistemas de refrigeraciónDocument2 paginiSelección del refrigerante adecuado para sistemas de refrigeraciónDrosee MatiasÎncă nu există evaluări
- Taller 001 Teoria de Control - PREGUNTASDocument6 paginiTaller 001 Teoria de Control - PREGUNTASAllen YusedÎncă nu există evaluări
- Flujómetros tipo sonar hoja de datosDocument2 paginiFlujómetros tipo sonar hoja de datosMichael Perez CisternasÎncă nu există evaluări
- Control de Nivel de Dos Tanques en SerieDocument4 paginiControl de Nivel de Dos Tanques en SerieBeckyBethÎncă nu există evaluări
- Trabajo de InstrumentacionDocument21 paginiTrabajo de InstrumentacionGiovanny BuitragoÎncă nu există evaluări
- EJERCICIOSCIRCUITOSDocument15 paginiEJERCICIOSCIRCUITOSRogelio Ayala GarcíaÎncă nu există evaluări
- Control de Un Horno EléctricoDocument5 paginiControl de Un Horno EléctricoJuan Carlos QuinchuelaÎncă nu există evaluări
- Controladores PID Clase A, B y CDocument7 paginiControladores PID Clase A, B y CFaBro GsÎncă nu există evaluări
- Planta de Control de NivelDocument8 paginiPlanta de Control de NivelGerson OvalleÎncă nu există evaluări
- Control avanzado MIMODocument7 paginiControl avanzado MIMOJuan Pablo RequezÎncă nu există evaluări
- Hoja Datos Termo Duo RTD 1035449Document4 paginiHoja Datos Termo Duo RTD 1035449Alvaro Aniceto RomeroÎncă nu există evaluări
- Control de temperatura con Grafcet y S7-200Document7 paginiControl de temperatura con Grafcet y S7-200Erika Echeverry100% (1)
- Desarrollo de Ejercicios de Características Estaticas y DinámicasDocument9 paginiDesarrollo de Ejercicios de Características Estaticas y DinámicasAlonsoNarváezGrijalbaÎncă nu există evaluări
- Practica 6 Modelado de SistemasDocument21 paginiPractica 6 Modelado de SistemasSolounNiñoderelleno MasÎncă nu există evaluări
- Informe 2p Diagrama Secuenciales de ControlDocument6 paginiInforme 2p Diagrama Secuenciales de ControlFrancisco ZuñigaÎncă nu există evaluări
- Problema 8Document2 paginiProblema 8egabriel09Încă nu există evaluări
- Fotocelula A 220VDocument5 paginiFotocelula A 220VTrafu LarÎncă nu există evaluări
- Práctica 3 Instrumentación AD590Document11 paginiPráctica 3 Instrumentación AD590Ararage Kun100% (2)
- Método del relé o método Aström y HäggLund para control PIDDocument1 paginăMétodo del relé o método Aström y HäggLund para control PIDjmpateiro1985Încă nu există evaluări
- Ejercicios Ciclo Brayton KikeDocument28 paginiEjercicios Ciclo Brayton KikeWilson Mamani CondoriÎncă nu există evaluări
- Informe N°2 - Circuitos ElectronicosDocument15 paginiInforme N°2 - Circuitos ElectronicosH Lizana BartholomeoÎncă nu există evaluări
- Transformadas Discretas de HilbertDocument21 paginiTransformadas Discretas de HilbertDavid Ruiz100% (1)
- Sistema de Control Del Llenado de Un TanqueDocument6 paginiSistema de Control Del Llenado de Un TanqueEliecerÎncă nu există evaluări
- Informe de Control de TemperaturaDocument6 paginiInforme de Control de TemperaturaJunior TB100% (1)
- Normas Minimas de Seguridad en Laboratorio de Circuitos ElectricosDocument5 paginiNormas Minimas de Seguridad en Laboratorio de Circuitos Electricos601195Încă nu există evaluări
- 2 - Metodologia para Elegir Variable de EstadoDocument41 pagini2 - Metodologia para Elegir Variable de EstadoBrayanÎncă nu există evaluări
- 1Document4 pagini1MariaÎncă nu există evaluări
- Control en Cascada Parte JuanDocument15 paginiControl en Cascada Parte JuanJuan David SantamaríaÎncă nu există evaluări
- Direccion Del Flujo de PotenciaDocument9 paginiDireccion Del Flujo de PotenciafmambelÎncă nu există evaluări
- Análisis de un sistema de control de nivel de tanque con lazo abierto y cerrado en SimulinkDocument7 paginiAnálisis de un sistema de control de nivel de tanque con lazo abierto y cerrado en SimulinkJuuaanchoo CnnzÎncă nu există evaluări
- Resumen Control de Temperatura Con TriacDocument11 paginiResumen Control de Temperatura Con TriacKevin Petrucci0% (1)
- Conexion Delta EstrellaDocument21 paginiConexion Delta EstrellaCristian Medrano100% (3)
- Tablas Norma ISA PDFDocument22 paginiTablas Norma ISA PDFOscar CalderonÎncă nu există evaluări
- Examenes S.Acionamiento PDFDocument12 paginiExamenes S.Acionamiento PDFDIAZ CUBA ROGER JEANPOOLÎncă nu există evaluări
- Taller 2 - Función de Transferencia de TanqueDocument7 paginiTaller 2 - Función de Transferencia de TanqueBrayan Montañez SierraÎncă nu există evaluări
- Ratio ControlDocument8 paginiRatio ControlJosé ArturoÎncă nu există evaluări
- Ejercicios de NivelDocument3 paginiEjercicios de Niveljogm17Încă nu există evaluări
- Practica 2 TeoriaDocument7 paginiPractica 2 TeoriaJonathan Gonzalez DiazÎncă nu există evaluări
- T2 Tiempo de Respuesta de Un PLCDocument12 paginiT2 Tiempo de Respuesta de Un PLCVector X MonÎncă nu există evaluări
- Informe 3Document3 paginiInforme 3TRVP RXCKSTVRÎncă nu există evaluări
- Elementos primarios de medición ISA-S5.1Document6 paginiElementos primarios de medición ISA-S5.1Jesus Max Hdez100% (1)
- Primer Taller Analisis y Modelamiento 2020 1 PDFDocument2 paginiPrimer Taller Analisis y Modelamiento 2020 1 PDFcristian garcesÎncă nu există evaluări
- Compresores AxialesDocument88 paginiCompresores AxialesLuis AugustoÎncă nu există evaluări
- Formulario - Convolución y TransformadasDocument7 paginiFormulario - Convolución y TransformadasAstrianVorgiaÎncă nu există evaluări
- Práctica 3.2 SEIDocument7 paginiPráctica 3.2 SEIJesus Leopoldo NuñezÎncă nu există evaluări
- Apuntes Pid SimulinkDocument3 paginiApuntes Pid SimulinkJairo RamírezÎncă nu există evaluări
- ControlDocument6 paginiControlWilliams Galiano CarrilloÎncă nu există evaluări
- LABORATORIODocument16 paginiLABORATORIOOSCAR VINICIO CHUQUITARCO LAGLAÎncă nu există evaluări
- TACOU3.1.2 111 Diseño de Control PIDDocument17 paginiTACOU3.1.2 111 Diseño de Control PIDCarlos Alberto Medina LeonÎncă nu există evaluări
- Control PID para sistema de segundo ordenDocument18 paginiControl PID para sistema de segundo ordenCamilo Rincón100% (2)
- Algoritmo de Cálculo de HumidificaciónDocument2 paginiAlgoritmo de Cálculo de HumidificaciónAbner J Valdivia100% (1)
- Universidad Nacional de Ingenieria: Recinto Universitario Simón Bolívar (RUSB) Facultad de Ingeniería QuímicaDocument16 paginiUniversidad Nacional de Ingenieria: Recinto Universitario Simón Bolívar (RUSB) Facultad de Ingeniería QuímicaAbner J ValdiviaÎncă nu există evaluări
- Ciclos TymaDocument13 paginiCiclos TymaAbner J ValdiviaÎncă nu există evaluări
- 1 NormasycriteriosDocument1 pagină1 NormasycriteriosAbner J ValdiviaÎncă nu există evaluări
- Introduccion A Los ReactoresDocument46 paginiIntroduccion A Los ReactoreskaledÎncă nu există evaluări
- Tesis FinalDocument8 paginiTesis FinalAbner J ValdiviaÎncă nu există evaluări
- Diseño de ReactoreDocument4 paginiDiseño de ReactoreAbner J ValdiviaÎncă nu există evaluări
- Desechos de La IndustriaDocument5 paginiDesechos de La IndustriaAbner J ValdiviaÎncă nu există evaluări
- SGS MIN 810 Pilot Plant Testing SP 08 01Document3 paginiSGS MIN 810 Pilot Plant Testing SP 08 01Abner J ValdiviaÎncă nu există evaluări
- Nicaragua 2Document19 paginiNicaragua 2Abner J ValdiviaÎncă nu există evaluări
- Obtencion de Etanol A Partir de La Cascara de Platano OkDocument72 paginiObtencion de Etanol A Partir de La Cascara de Platano OkAbner J ValdiviaÎncă nu există evaluări
- 2 NormasycriteriosDocument52 pagini2 NormasycriteriosJonathan BenavidesÎncă nu există evaluări
- Plan de Trabajo Individual para Pasantías ProfesionalizanteDocument1 paginăPlan de Trabajo Individual para Pasantías ProfesionalizanteAbner J ValdiviaÎncă nu există evaluări
- Obtencion de Los TiolesDocument3 paginiObtencion de Los TiolesAbner J Valdivia100% (3)
- Estructura de Los CristalizadoresDocument3 paginiEstructura de Los CristalizadoresAbner J ValdiviaÎncă nu există evaluări
- AntonoineDocument1 paginăAntonoineAbner J ValdiviaÎncă nu există evaluări
- Método de La Efectividad-NtuDocument7 paginiMétodo de La Efectividad-NtuAbner J ValdiviaÎncă nu există evaluări
- Trabajo Final de OperacionesDocument24 paginiTrabajo Final de OperacionesAbner J ValdiviaÎncă nu există evaluări
- Seminario de AditivosDocument5 paginiSeminario de AditivosAbner J Valdivia100% (1)
- Flujograma Del Proceso Productivo Del ArrozDocument3 paginiFlujograma Del Proceso Productivo Del ArrozAbner J Valdivia75% (8)
- Estructura de Los CristalizadoresDocument3 paginiEstructura de Los CristalizadoresAbner J ValdiviaÎncă nu există evaluări
- Aplicacion FrigorificaDocument8 paginiAplicacion FrigorificaAbner J ValdiviaÎncă nu există evaluări
- Requerimiento de Agua de Una Economía Basada en El HidrogenoDocument3 paginiRequerimiento de Agua de Una Economía Basada en El HidrogenoAbner J ValdiviaÎncă nu există evaluări
- Acumulador de PlomoDocument3 paginiAcumulador de PlomoAbner J ValdiviaÎncă nu există evaluări
- Cuestionario de HidraulicaDocument1 paginăCuestionario de HidraulicaAbner J ValdiviaÎncă nu există evaluări
- AntonoineDocument1 paginăAntonoineAbner J ValdiviaÎncă nu există evaluări
- Proyecto Elaboracion de Etanol A Base de Cascara de PlatanoDocument5 paginiProyecto Elaboracion de Etanol A Base de Cascara de PlatanoLilidel Maive Min Ho29% (7)
- CromatografiaDocument3 paginiCromatografiaAbner J ValdiviaÎncă nu există evaluări
- Calentamiento de MicroondasDocument5 paginiCalentamiento de MicroondasEverth Javier Ruiz GuillénÎncă nu există evaluări
- MSX 88Document11 paginiMSX 88Hector RamosÎncă nu există evaluări
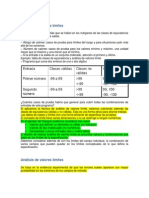
- Análisis de Valores LimitesDocument4 paginiAnálisis de Valores LimitesannaleemontoyaÎncă nu există evaluări
- Información General y Registro de Estaciones Base en MirafloresDocument7 paginiInformación General y Registro de Estaciones Base en Mirafloreseljmago12Încă nu există evaluări
- TOPODocument36 paginiTOPORusbel Eugenio VegaÎncă nu există evaluări
- Manual de Procedimientos para Talleres para Padres Sobre Crianza Positiva CapaDocument20 paginiManual de Procedimientos para Talleres para Padres Sobre Crianza Positiva CapaSwissJust MariaÎncă nu există evaluări
- Quinga Preparatorio4 GR4 2 SDDocument6 paginiQuinga Preparatorio4 GR4 2 SDJesica QuingaÎncă nu există evaluări
- PFC Joaquin Bish TakeuchiDocument95 paginiPFC Joaquin Bish TakeuchiAndres BustamanteÎncă nu există evaluări
- Canaima Educativo 2do GradoDocument7 paginiCanaima Educativo 2do GradoAndrsn de JesusÎncă nu există evaluări
- Aviso de Privacidad Integral Plataforma Durango DigitalDocument3 paginiAviso de Privacidad Integral Plataforma Durango DigitalLic. Erick GonzálezÎncă nu există evaluări
- Proteccion SistemicaDocument18 paginiProteccion SistemicaRonny RojasÎncă nu există evaluări
- MPLSDocument25 paginiMPLSagruize100% (1)
- Linea Del Tiempo Del InternetDocument1 paginăLinea Del Tiempo Del InternetHanna SahianyÎncă nu există evaluări
- Tarea 02/metrologia ElectricaDocument20 paginiTarea 02/metrologia ElectricaAngel Flores GómezÎncă nu există evaluări
- Registro de Conversaciones Curso WiFi Con PIC IoT 2020 - 04 - 11 13 - 57Document11 paginiRegistro de Conversaciones Curso WiFi Con PIC IoT 2020 - 04 - 11 13 - 57Bri GeorgeÎncă nu există evaluări
- Actividad Virtual 6 Comunicación EscritaDocument3 paginiActividad Virtual 6 Comunicación EscritaMiguel MoriÎncă nu există evaluări
- Problemas de Aplicaciones Comerciales para Quinto de SecundariaDocument4 paginiProblemas de Aplicaciones Comerciales para Quinto de SecundariaJuan Carlos Cueva AguirreÎncă nu există evaluări
- Guia Padlet PDFDocument11 paginiGuia Padlet PDFfelixsergio1966Încă nu există evaluări
- Cuadro Comparativo 292b1Document1 paginăCuadro Comparativo 292b1mariÎncă nu există evaluări
- Evidencia de Aprendizaje. Modelado de FuncionesDocument6 paginiEvidencia de Aprendizaje. Modelado de FuncionesLuis Velazquez VazquezÎncă nu există evaluări
- Business Intelligence and AnalyticsDocument7 paginiBusiness Intelligence and AnalyticsAlessandra Segovia LópezÎncă nu există evaluări
- 3 Live CD - Usb.Document8 pagini3 Live CD - Usb.pquirozg9565Încă nu există evaluări
- Cómo actualizar el firmware de una Toshiba 3511-4511Document3 paginiCómo actualizar el firmware de una Toshiba 3511-4511julianlopezcab8801100% (2)
- Resolución de problemas de ángulos y triángulos en ríos y ecuaciones trigonométricasDocument3 paginiResolución de problemas de ángulos y triángulos en ríos y ecuaciones trigonométricasrulvilloÎncă nu există evaluări
- Factorización de polinomiosDocument9 paginiFactorización de polinomiosCONCEJO MACARAVITAÎncă nu există evaluări
- Formato Proyectos Colegio Americano Pereira 2020 V2.0Document1 paginăFormato Proyectos Colegio Americano Pereira 2020 V2.0ricardo andres castrillonÎncă nu există evaluări
- AVR 791 OM-E - 009 Denon PDFDocument84 paginiAVR 791 OM-E - 009 Denon PDFnishilgeorgeÎncă nu există evaluări
- Examen de Prueba 1 Scrum Master Version 2020 EspanolDocument10 paginiExamen de Prueba 1 Scrum Master Version 2020 EspanolxpatrickxÎncă nu există evaluări
- SA-010-F Acta Retoma de Equipos - 2018Document1 paginăSA-010-F Acta Retoma de Equipos - 2018Tutor SENAÎncă nu există evaluări
- Act 3 Modelo Matematico en Hoja de Calculo 1895499 IMEDocument7 paginiAct 3 Modelo Matematico en Hoja de Calculo 1895499 IMERubi GallegosÎncă nu există evaluări
- Refinería minimiza costos comprando petróleo crudoDocument5 paginiRefinería minimiza costos comprando petróleo crudoJose Luis Condori PintoÎncă nu există evaluări