Documente Academic
Documente Profesional
Documente Cultură
Cap4 PDF
Încărcat de
ErickTitlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Cap4 PDF
Încărcat de
ErickDrepturi de autor:
Formate disponibile
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
4 - PRTICOS PLANOS
4.1 - INTRODUO
Os prticos planos so estruturas reticuladas que podem ser discretizadas por elementos de
viga com deformao axial. Assim, a simulao do comportamento de prticos planos
depende da teoria adoptada para modelar o comportamento dos elementos de viga. As teorias
correntemente utilizadas so, basicamente, a de Euler-Bernoulli e a de Timoshenko.
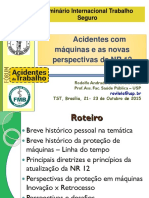
No elemento de viga de Euler-Bernoulli admite-se que as seces transversais, normais ao
eixo da viga antes da deformao, mantm-se planas e ortogonais ao referido eixo aps a
deformao. Esta hiptese resulta do facto de nesta teoria se admitir que a rotao de uma
seco transversal igual inclinao do eixo da viga (ver figura 4.1a). Neste caso a
deformao por corte ignorada, pelo que a aplicao desta teoria deve ser restrita a vigas
delgadas.
Na teoria de Timoshenko admite-se que as seces planas e normais ao eixo da viga antes da
deformao, permanecem planas mas no necessariamente ortogonais ao eixo da viga (ver
figura 4.1b). Desta forma possvel simular o comportamento de vigas em que no
desprezvel a deformao por corte.
l 2, u l 2
Normal superfcie mdia
aps a deformao
du l 1
dl 1
l 1 , u l1
l1
Inclinao do eixo da viga
(a)
l 2, u l 2
Normal superfcie mdia
aps a deformao
l 1 , u l1
Deformao real
l1
Deformao admitida
Inclinao do eixo da viga
(b)
Figura 4.1 - Deformao de um elemento de viga segundo a teoria de Euler-Bernoulli (a) e de Timoshenko (b).
Joaquim Barros 4.1
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
Na figura (4.1) A i o referencial local da barra. Note-se que no caso dos prticos as equaes
de equilbrio de cada barra so estabelecidas no referencial local da barra. A matriz de rigidez
e o vector das foras nodais equivalentes so obtidas no referencial local da barra, sendo em
seguida convertidos para o referencial global xi da estrutura e assemblados na matriz de
E E
rigidez e no vector das foras nodais equivalentes da estrutura, K e Q , respectivamente.
4.2 - ELEMENTO DE VIGA DE EULER-BERNOULLI COM DEFORMAO
AXIAL
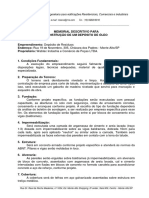
A teoria de Euler-Bernoulli admite as seguintes hipteses:
i) Os deslocamentos verticais uA 2 de todos os pontos de uma seco transversal qualquer
so pequenos, quando comparados com a altura da viga, e so iguais ao respectivo
deslocamento do eixo da viga;
ii) O deslocamento lateral, uA 3 nulo ( ver Figura 4.2 );
iii) Seces transversais planas e normais ao eixo da viga antes da deformao mantm-se
planas e ortogonais ao referido eixo aps a deformao.
Ml
3 ul
fl 2
2
Fl
2
ul
h l2 2
eixo
da ba
rra
l2
l1 , u l O l1 , u l
L 1 h 1
l
3
l3
l
3
l2
B B'
l3 , l u l1 l1 , u l
3 1
A A'
B''' B'' B para B': deformao axial
B' para B'' e B'' para B''': deformao por flexo e corte
A''
Figura 4.2 - Deformao axial de um elemento de viga segundo a teoria de Euler-Bernoulli.
Joaquim Barros 4.2
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
4.2.1 - Campo de deslocamentos
Tendo em conta as hipteses admitidas na teoria de Euler-Bernoulli, o campo de
deslocamentos de um ponto qualquer da viga define-se por intermdio das seguintes relaes
(ver tambm Figura 4.2),
uA 1 (A 1 , A 2 , A 3 ) = uA 1 (A 1 , A 2 = 0, A 3 = 0) A 2 A 3 (A 1 , A 2 = 0, A 3 = 0)
uA 2 (A 1 , A 2 , A 3 ) = uA 2 (A 1 , A 2 = 0, A 3 = 0) (4.1a)
u A 3 (A 1 , A 2 , A 3 ) = 0 ,
ou, mais simplesmente,
uA 1 (A 1 , A 2 , A 3 ) = uA 1 (A 1 ) A 2 A 3 (A 1 )
u A 2 (A 1 , A 2 , A 3 ) = u A 2 (A 1 ) (4.1b)
u A 3 (A 1 , A 2 , A 3 ) = 0 ,
em que uA 1 e uA 2 so os deslocamentos de um ponto do eixo da viga segundo as direces de
A 1 e A 2 , respectivamente. Devido hiptese iii), a rotao A de (4.1) igual inclinao da
3
tangente ao eixo da viga deformada (ver Figura 4.1a), pelo que,
duA 2
A = (4.2)
3
dA 1
duA 2
uA1 = uA1 A 2 . (4.3)
dA 1
4.2.2 - Extenses
A nica componente no nula do tensor das extenses a devida variao de comprimento
das fibras paralelas ao eixo da viga, pelo que,
duA1
A = . (4.4)
1
dA 1
Substituindo (4.3) em (4.4) resulta,
du A 1 d 2uA 2
A = A2 (4.5)
1
dA 1 dA 12
ou
Joaquim Barros 4.3
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
A =a + f
1
(4.6a)
em que
du A 1
a = (4.6b)
dA 1
a extenso por deformao axial e
d 2uA 2
f = A 2 f = A 2 (4.6c)
dA 12
a extenso por flexo.
4.2.3 - Tenses e esforos
Se a nica componente no nula do tensor das extenses A1 , ento A1 ser a nica
componente no nula do tensor das tenses,
A = E A
1 1
(4.7)
em que E o mdulo de elasticidade do material. Substituindo (4.5) em (4.7) resulta
du A 1 d 2u A 2
A = E E A2 (4.8)
1
dA 1 dA 12
ou
A = a + f
1
(4.9a)
em que
duA1
a = E (4.9b)
dA 1
a tenso devida variao de comprimento do eixo da viga e,
d 2uA 2
f = E A2 (4.9c)
dA 12
a tenso devida flexo da viga.
O esforo axial resulta da integrao de (4.9b) na rea da seco transversal do elemento,
Joaquim Barros 4.4
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
duA1
N A1 = a dA = EA = EA a . (4.10a)
A
dA 1
Por sua vez o momento flector obtm-se integrando, na seco transversal da viga, o
momento em relao superfcie mdia da viga, provocado pela tenso A1 ,
M A 3 = A 2 A1 dA
A
h/2
duA1 d 2uA 2
= A2 E A2 b dA 2
dA dA 12
h / 2 1 (4.10b)
d 2uA 2 h / 2 2
dA 12 h/ 2
= E A 2 b dA 2
= E I A 3
em que
h/2
IA3 = A
2
2 b dA 2 (4.11)
h / 2
a inrcia da seco transversal da viga, em relao ao eixo A 3 , e b a largura dessa seco,
e
d 2uA 2
f = = (4.12)
dA 12
a curvatura do eixo da viga.
Na figura 4.3 representa-se a conveno de sinais positivos para as tenses e esforos.
l2
a f
eixo da = +
barra l1 N l1 M l3
(l3 )
a f
Figura 4.3 Conveno de sinais positivos para as tenses e esforos.
Joaquim Barros 4.5
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
4.2.4 - Expresso do princpio dos trabalhos virtuais
Considere-se um elemento de viga de volume V solicitado por foras generalizadas
proporcionais sua massa QV , foras generalizadas distribudas por unidade de
comprimento, Q L , e foras generalizadas aplicadas em pontos do seu domnio Q p . Sob este
carregamento o corpo sofre extenses e deslocamentos virtuais, e U , respectivamente,
pelo que, pela aplicao do princpio dos trabalhos virtuais, o trabalho interno igual ao
trabalho externo realizado durante a deformao virtual do elemento, i.e.:
dV = U T QV dV + U T Q L dL + U T Q p
T
(4.13)
V (e) V (e) L( e )
em que
Wint( e ) = T dV
V (e)
= A1 A dV
1
V (e)
=
d (uA1 )
A2
d 2 uA 2 duA1 (
A2
)
d 2 uA 2
E dA dA 1 (4.14)
dA 1
L( e ) A( e )
dA 12 dA 1 dA 12
= ( a )
E a A 2 a E f A 2 f E a + A 22 f E f dA dA 1
L( e ) A( e )
= ( a E A a + f E I A 3 f dA 1 )
L( e )
o trabalho interno de deformao virtual realizado durante as extenses virtuais A1 . O
termo
( a EA a ) dA 1 (4.15a)
L( e )
representa a rigidez extensional do elemento e o termo,
(
(e)
f )
EI A 3 f dA 1 (4.15b)
L
representa a rigidez flexo do elemento.
Os termos da direita da igualdade (4.13),
T T T
U QV dV + U Q L dL + U Q p (4.16)
V (e) L( e )
traduzem o trabalho externo realizado durante os deslocamentos virtuais U , em que
Joaquim Barros 4.6
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
g x1
Q V = g x2 , (4.17)
0
sendo a massa por unidade de volume do material que constitui o elemento e g x1 , g x2 a
acelerao da gravidade segundo os eixos x1 e x2 do referencial global (ver Figura 4.4).
x2
l2 l3
l1
2 (2) 3
l
l1
2
l3
gx
l
(1) (3)
3
2
l
l2
1
gx
1 1 4
x1
(x 3 )
Figura 4.4 Componentes da acelerao da gravidade em prticos planos.
Por sua vez
f A1
Q L = fA 2 (4.18)
m
A3
o vector das foras generalizadas distribudas por unidade de comprimento em barras, sendo
f A1 e f A 2 as foras distribudas por unidade de comprimento segundo os eixos A 1 e A 2 , e mA 3
o momento distribudo por unidade de comprimento em torno do eixo A 3 (ver Figura 4.5).
x2 l2 l3
l1
fl
2
fl
1
2 (2) 3
l
2
l1
3
l3
l
(1) (3)
1
l2 ml
3
1 4
x1
(x 3 )
Figura 4.5 Foras distribudas por unidade de comprimento.
Joaquim Barros 4.7
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
O vector
Fx1
Q p = Fx2 (4.19)
M
x3 P
representa as foras generalizadas aplicadas num ponto P, sendo Fx1 e Fx2 as foras segundo
os eixos x1 e x2, e M x 3 o momento segundo x3 (Figura 4.6).
x2 FA x F3 x
2 2
M3x
3
F2 x 2 A (2) 3
1
FB x B MCx
1 C 3
(1) (3)
1 4
x1
(x 3 )
Figura 4.6 Foras generalizadas aplicadas em pontos da estrutura.
4.2.5 - Discretizao em elementos finitos de dois ns
Analisando as parcelas da expresso (4.14) dos trabalhos virtuais verifica-se que o trabalho
interno de deformao a adio do trabalho por deformao axial
( ) EA du
d u A 1
A1
dA 1 (4.20)
L( e )
dA 1 dA 1
tratado nos captulos anteriores, com o trabalho por flexo,
(
d 2 u A 2 ) EI d u2
A2
2 2
dA 1 . (4.21)
L( e )
dA 1 dA 1
O comportamento por deformao axial simulado pela formulao descrita nos captulos
anteriores, enquanto o comportamento flexo ser apresentado numa prxima seco.
Na parcela de trabalho interno por deformao de flexo, (4.21), existem segundas derivadas
da flecha uA 2 . Por este facto, deve-se utilizar elementos de continuidade de classe C1 de forma
a garantir-se quer a continuidade dos deslocamentos quer da sua derivada (ver seces 3.2 e
3.6.3).
Joaquim Barros 4.8
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
O elemento de viga mais simples de classe C1 o dois ns representado na figura 4.7
l2
1 2 3 4 i j
l1
u i l2 u j l2
i j
du i l 2 du j l 2
i l3 = j l3 =
dl 1 dl 1
L(e)
Numerao l i1= 0 l j 1=
(e)
L
Local Global i j
l1
1, 2 i, j
u1 l 2 ui l2 -1 +1
du1 l 2 du i l 2 s1
dl1 dl1 f
1 N 11 (s1)
u 2 l2 u j l2
du 2 l 2 du j l 2
f
dl1 dl1 45
N 12 (s1)
f
N 21 (s1) 1
f
N 22 (s )
45
Figura 4.7 - Elemento de viga de Euler-Bernoulli de dois ns. Graus de liberdade e funes de forma hermitcas
na simulao do comportamento flexo.
A continuidade das primeiras derivadas obriga a tomar como grau de liberdade a rotao,
duA 2 dA 1 . Assim, cada n genrico i tem dois graus de liberdade uiA 2 e duiA 2 dA 1 , pelo que,
cada elemento tem quatro graus de liberdade. Desta forma, o campo de deslocamentos, uA 2 ,
fica perfeitamente definido pela funo cbica seguinte,
Joaquim Barros 4.9
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
uA 2 ( s1 ) = 1 + 2 s1 + 3 s12 + 4 s13 (4.22a)
ou
1
[
uA 2 ( s1 ) = 1 s1 s12 s13 ] 2
3
(4.22b)
4
ou ainda
uA 2 ( s1 ) = S . (4.22c)
Derivando (422a) obtm-se,
duA 2
= 2 + 2 3 s1 + 3 4 s12 . (4.23)
ds1
Na seco 3.3 verificou-se que no caso de um elemento de dois ns ou de um elemento de trs
ns, com n intermdio ao centro,
dx1 = J ds1
L . (4.24)
= ds1
2
Alm disto, verificou-se ainda que
du1 du1 dx1
= . (4.25)
ds1 dx1 ds1
Substituindo (4.24) em (4.25) e passando u1 para u A 2 e x1 para A 1 obtm-se,
duA 2 duA 2 dA 1
=
ds1 dA 1 ds1
. (4.26)
L duA 2
=
2 dA 1
As constantes i de (4.22) calculam-se substituindo em (4.22) e (4.23) os valores de u A 2 e de
du A 2 ds1 nos ns do elemento, resultando:
Joaquim Barros 4.10
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
uA 2 ( s1 = 1) = u1A 2 = 1 + 2 (1) + 3 (1) 2 + 4 (1) 3
duA 2 L du1A 2 L
= = 1A 3 = 2 + 2 3 (1) + 3 4 (1) 2
ds1 s1 = 1
2 dA 1 2
(4.27a)
uA 2 ( s1 = +1) = u 2A 2 = 1 + 2 (+1) + 3 (+1) 2 + 4 (+1) 3
duA 2 L du2 A 2 L
= = 2 A 3 = 2 + 2 3 (+1) + 3 4 (+1) 2
ds1 s1 = +1
2 dA 1 2
ou
u1A 2
L 1 1 1 1 1
1A 3 0 1 2 3
2 = 2 (4.27b)
u2 A 2
1 1 1 1 3
L 0
2 2 A 3
1 2 3 4
ou ainda
(e)
U f = C (4.27c)
(e)
em que U f um vector que inclui os graus de liberdade de flexo do elemento. De (4.27c)
resulta,
(e)
= C 1 U f (4.28a)
em que,
1/ 2 1/ 4 1/ 2 1 / 4
3/ 4 1/ 4 3/ 4 1 / 4
=
1
C . (4.28b)
0 1/ 4 0 1/ 4
1 / 4 1/ 4 1/ 4 1 / 4
Substituindo (4.28a) em (4.22c) obtm-se,
Joaquim Barros 4.11
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
(e)
uA 2 ( s1 ) = S C U f
1
u
1/ 2 1/ 4 1/ 2 1 / 4 1A 2 (4.29a)
L
3 / 4 1/ 4 1 / 4 2 1A 3
[
= 1 s1 s12 ]
s13
0
3/ 4
1/ 4 0 1 / 4 u2A 2
L
1 / 4 1/ 4 1/ 4 1 / 4 2A 3
2
u1A 2
1 3 1 L1 1 1 2 1 3 1 3 1 L 1 1 1 2 1 3 1A 3
= s1 + s13 s1 s1 + s1 + s1 s13 s1 + s1 + s1
2 4 4 24 4 4 4 2 4 4 2 4 4 4 4 u2A 2
2A 3
ou
u1A 2
L f L f 1A 3
uA 2 (s1 ) = N11f N 12 N 21f N 22 (4.29b)
2 2 u 2A 2
2 A 3
ou ainda
[ ]( )U
uA 2 = N
f e (e)
f (4.29c)
em que N [ ]( )
f e
a matriz das funes de forma do elemento de viga de dois ns,
representadas na Figura 4.7, e designadas de funes de forma Hermitianas (ou do elemento
de viga Hermtico de dois ns).
As componentes de N [ ]( ) definem-se por intermdio das relaes seguintes,
f e
1
N11f = (2 3s1 + s13 )
4
L f L 1
N12f = N 12 = (1 s1 s12 + s13
2 2 4
(4.30)
1
N 21f = (2 + 3s1 s13 )
4
L f L 1
N 22f = N 22 = (1 s1 + s12 + s13 )
2 2 4
sendo N ijf a funo de forma correspondente ao grau de liberdade j do n i, relativa ao campo
de deformao por flexo.
Repare-se que a derivada de N i1f com i=1,2 nula no n i, que N i1f com i=1,2 tem valor
f
unitrio no n i e nulo no outro n, que N i 2 com i=1,2 tem valor nulo no n i e que a
Joaquim Barros 4.12
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
f
derivada de N i 2 com i=1,2 tem valor unitrio em i e nulo no outro n (acompanhar esta
exposio analisando a forma as funes representadas na Figura 4.7).
A inclinao do eixo da viga obtm-se derivando (4.29),
duA 2 duA 2 ds1 duA 2 2
= =
dA 1 ds1 dA 1 ds1 L
u1A 2 .(4.31)
2 3 3 2 L 1 1 3 2 3 3 2 L 1 1 3 2 du1A 2 / dA 1
= + s1 s1 + s1 s1 + s1 + s1
L 4 4 2 4 2 4 4 4 2 4 2 4 u2 A 2
du2 A 2 / dA 1
Por sua vez, a curvatura da viga obtm-se derivando (4.31) resultando,
d 2uA 2 d duA 2 ds1
=
dA 2
1 ds1 dA 1 dA 1
d duA 2 ds1 ds1
=
ds1 ds1 dA 1 dA 1
d duA 2 ds1 ds
= + 0 1
ds1 ds1 dA 1 dA 1
2
d 2uA 2 ds1
=
ds12 dA 1
2
4 d uA 2
=
L2 ds12
4 d2 N
= 2
[ ]( ) U
f e
(e)
f
L ds12
u1A 2
4 3 L 1 3 3 L 1 3 du1A 2 / dA 1 (4.32)
= s1 + s1 s1 + s1
L2 2 2 2 2 2 2 2 2 u2 A 2
du 2 A 2 / dA 1
pelo que
Joaquim Barros 4.13
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
f =
d 2uA 2
=
dA 12
(e ) (e )
=Bf U f (4.33)
4 d 2 N11f 4 d 2 N12f 4 d 2 N 21f 4 d 2 N 22f (e )
= 2 2 U f
L ds1 L2 ds12 L2 ds12 L2 ds12
6 1 3 6 1 3 (e)
= 2 s1 + s1 2 s1 + s1 U f
L L L L L L
(e )
em que B f a matriz de deformao por flexo do elemento. Para se incluir o trabalho por
deformao axial verifique-se que,
a = B (ae ) U (e ) (4.34)
em que
B a = [B1a 0 0]
(e )
0 0 B2 a
2 dN1a 2 dN 2a
= 0 0 0 0 (4.35)
L ds1 L ds1
1 1
= 0 0 0 0
L L
a matriz de deformao axial, em que N 1a e N 2a so as funes de forma nos ns 1 e 2,
representadas em (3.10). Por sua vez a extenso por flexo pode ser obtida por intermdio da
seguinte relao
f = B (fe ) U (e ) (4.36)
(e ) 6 1 3 6 1 3
B f = 0 s1 + s1 0 2 s1 + s1 (4.37)
L2 L L L L L
a matriz de deformao por flexo e
(e) du1A 2 du 2 A 2
U = u1A1 u1A 2 u2A1 u2A 2 (4.38)
dA 1 dA 1
so os graus de liberdade do elemento de dois ns.
Substituindo (4.34) e (4.36) em (4.14) resulta,
Wint( e ) = U ( e )
T
1
+1
([B ] EA B + [B ] EI
(e )
a
T (e )
a
(e )
f
T
A3
(e )
Bf ) L2 ds U
1
(e)
(4.39)
Joaquim Barros 4.14
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
pelo que a matriz de rigidez do elemento fica
1
L
0
+1 1 1
= 10 EA
(e)
k 0 0 0 0 +
1 L L
L
0
0
0
6
L 2
s1
1 3
+ s1
6 1 3 6 1 3 L (e )
+ L L EI A 3 0 s + s 0 s + s1 ds1 u
0 L L 2
1 1 1
L2 L L L2
6 s
L 2 1
1 3
+ s 1
L L
EA EA
L2 0 0 2 0 0
L
36 2 6 1 3 36 2 6 1 3
0 s1 s1 + s1 0 4 s1 s1 + s1
L4 L2 L L L L2 L L
1 3 6 1 3
2
1 3 6 1 3 1 3
+1 0 + s1 2 s1 + s1 0 + s1 2 s1 + s1 + s1
L L L L L L L L L L L L L ds U (e )
=
2 1 EA EA 1
L2 0 0
L 2
0 0
0 36 6 1 3 36 6 1 3
4 s1 2
2 s1 + s1 0 s
4 1
2
2 s1 + s1
L L L L L L L L
6 1 3 1 3 1 3 6 1 3 1 3 1 3
0 s1 + 1s + 1 + 1
s s 0 2 1 + 1
s s + s1 + s1
L2 L L L L L L L L L L L L L
EA EA
L 0 0 0 0
L
12 EI A 3 6 EI A 3 12 EI A 3 6 EI A 3
0 0
L3 L2 L3 L2
6 EI A 3 4 EI A 3 6 EI A 3 2 EI A 3
0 0
= L2 L L2 L U (e) .(4.40)
EA EA
0 0 0 0
L L
12 EI A 3 6 EI A 3 12 EI A 3 6 EI A 3
0 0 2
L3 L2 L3 L
0 6 EI A 3 2 EI A 3 6 EI A 3 4 EI A 3
0
L2 L L2 L
Por sua vez, as parcelas afectas ao trabalho virtual das foras exteriores fica,
T
Wext( e ) = U T QV A dA 1 + U T Q L dA 1 + U ( e ) Q P
L( e ) L( e )
(4.41)
[ ]
+1 (e ) T
[ ]
+1
( e )T L (e ) T L
= U N Q A ds1 + N Q ds1 + Q P
1
V
2 1
L
2
em que
Joaquim Barros 4.15
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
N1a 0 0
f
0 N 11 N11' f
0 N12' f
[N ( ) ]
f
e T N
= a 12
(4.42)
N2 0 0
0 N 21f 'f
N 21
0 N 22f 'f
N 22
a matriz das funes de forma correspondentes deformao axial e de flexo. Em (4.42)
N ' f so as derivadas de N f , estabelecidas em (4.31)
Constata-se que a matriz de rigidez deduzida no passo anterior igual determinada na
convencional teoria das estruturas. Isto deve-se ao facto da expresso polinomial da flecha no
elemento hermtico de dois ns (equao (4.29)) coincidir com a que se obtm integrando a
equao diferencial de equilbrio de uma viga submetida a foras nos ns. O exemplo
seguinte pretende esclarecer este ponto.
4.2.6 Exemplos de aplicao
Exemplo 1
Obter a equao do campo de deslocamentos de um elemento de viga por integrao da
equao diferencial de equilbrio.
Resoluo
Na Figura 4.8 representa-se o equilbrio de um elemento de viga.
As equaes de equilbrio no elemento de viga de comprimento dA 1 so,
dVA 2
F A2 = 0
dA 1
=0
(4.43)
dM A 3
M BA 3 = 0
dA 1
= VA 2
pelo que
d 2M A3
= 0. (4.44a)
dA 12
Substituindo (4.10b) em (4.44a) e tendo em ateno (4.12) obtm-se,
d 2M A3 d 2 d 2uA 2
= EI A
d 4uA 2
= 2 EI A 3 =0. (4.44b)
dA 12 dA 1 dA 12
3
d A 4
1
Joaquim Barros 4.16
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
l2
i j
(l 3 )
1 2
l1
(e)
u1 l 2 u 2 l2
i d l1 j
1 (e) 2
2 l3
1 l3
L(e)
+
dM l 3
Ml3 Ml3 +
dl 1
A B
(e) dV l 2
Vl 2 Vl 2 +
dl 1 dl 1
d l1
Figura 4.8 Elemento de viga.
A soluo para esta equao um polinmio cbico em A 1 .
u A 2 (A 1 ) = a 1 + a 2 A 1 + a 3 A 12 + a 4 A 31 (4.45)
em que as constantes ai so obtidas por intermdio das condies fronteira:
uA 2 (A (1e ) = 0) = u1A 2
duA 2
= 1A 3
dA 1 A 1( e ) = 0
(4.46)
uA 2 (A (1e ) = L( e ) = L) = u2A 2
duA 2
= 2A 3
dA 1 A ( e ) = L( e ) = L
1
resultando o seguinte sistema de equaes:
Joaquim Barros 4.17
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
u1A 2
du1A 2 1 0 0 0 a1
1A 3 =
dA 1 0 1 0 0 a2
u2A 2 = 1 L L2 L3 a3
. (4.47)
= du2 A 2 0 1 2 L 3L2 a4
2 A 3 dA 1
Resolvendo este sistema de equaes obtm-se as constantes ai , que substitudas em (4.45)
resulta,
du1A 2 du2 A 2
uA 2 ( A 1 ) = f1 ( A1 )u1A 2 + f 2 ( A 1 ) + f 3 ( A 1 )u2 A 2 + f 4 ( A 1 ) (4.48)
dA 1 dA 1
em que
2 3
A A
f1 (A 1 ) = 1 3 1 + 2 1
L L
A 2 A3
f 2 (A 1 ) = A 1 2 1 + 12
L L
2 3
. (4.49)
A A
f 3 (A 1 ) = 3 1 2 1
L L
A 31 A 31
f 4 (A 1 ) = 2 + 2
L L
Transformando (4.49) em coordenadas normalizadas verifica-se que estas funes coincidem
com as funes de forma do elemento de viga Hermtico de dois ns (equaes (4.30)).
Exemplo 2
Calcular os deslocamentos e as reaces da viga da figura 4.9 utilizando um elemento de viga
hermtico de dois ns.
l2, u l2
fl2
l1
(l 3 , l 3 )
2 2
fl2L fl2L
12 12
fl2L fl2L
2 2
Figura 4.9 Consola submetida a carga uniformemente distribuda.
Joaquim Barros 4.18
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
Resoluo
Na figura 4.9 representa-se as foras nodais equivalentes carga, f A 2 , uniformemente
distribuda na viga. O sistema de equaes de equilbrio da viga o seguinte,
fA2 L
u1A1 2 + V1A 2
12 6 L 12 6 L du1A 2 f L2
EI A 3 6 L 4 L2 6 L 2 L2 dA 1 12 + M 1A 3
A2
=
L3 12 6 L 12 6 L u2 A 2 fA 2 L . (4.50)
2 du
6 L 2 L2
6 L 4 L 2A 2 2
dA 1 f A 2 L2
12
Como
du1A 2
u1A 2 = = 0, (4.51)
dA 1
da resoluo de (4.50) resulta
f A 2 L4 du2A 2 f A L3 L2
u2A 2 = ; = 2 ; V1A 2 = Lf A 2 ; M 1A 3 = fA . (4.52)
8EI A 3 dA 1 6 EI A 3 2 2
Substituindo em (4.29b) obtm-se
L f du2 A 2
uA 2 ( s1 ) = N 21f u2 A 2 + N 22
2 dA 1
1 3
f A 2 L4 L1 f A 2 L3
= (2 + 3s1 s1 ) + 3
(1 s1 + s1 + s1 )
2 . (4.53)
4 8EI A 24 6 EIA l
3 3
f A 2 L4
= (4 + 7 s1 + 2s12 s13 )
96 EI A 3
f A 2 L4
Verificar que para s1= -1, uA 2 = 0 , e para s1= 1, uA 2 = , pelo que os deslocamentos
8EI A 3
nos ns coincidem com os obtidos com a soluo exacta. Contudo, no interior do elemento a
flecha no igual exacta, dado que a flecha exacta traduz-se por um polinmio de quarto
grau, enquanto a prevista pelo MEF determina-se por intermdio de um polinmio de terceiro
grau.
No que se refere aos momentos flectores tem-se
Joaquim Barros 4.19
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
d 2uA 2 (e )
M A 3 = EI A 3 = EI A 3 2
= EI A 3 B f u f
dA 1
0
0
4
6 1 3 6 1 3 fA 2 L
= EI A 3 2 s1 + s1 s1 + s1 . (4.54)
L L L L2 L L 8 EI A 3
3
fA 2 L
6 EI
A3
L2 L2
= f A 2 s1
6 4
5 1
Verificar que para s1= -1, M A 3 = f A 2 L2 e para s1= 1, M A 3 = f A 2 L2 . Assim, o
12 12
diagrama de momentos representa-se por uma recta enquanto a soluo exacta traduz-se por
uma equao do segundo grau,
fA2
M A3 = ( L A1 )2 .
2
A soluo exacta e a prevista pelo MEF so comparadas na Figura 4.10.
l2
fl2
l1
L
2
f l2L soluo exacta:
2
2
5f l 2 L MEF:
12
+
2
s 1 = -1/3 s 1 = +1/3 f l2L
s1 12
Figura 4.10 Diagramas do momento flector obtido de forma exacta e segundo o MEF.
Verifica-se que ambas as solues somente so iguais em s1 = 1 3 e s2 = 1 3 , que
coincidem com os pontos de Gauss correspondentes quadratura de Gauss-Legendre de um
polinmio de segundo ou terceiro grau.
Joaquim Barros 4.20
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
4.2.7 Exerccios resolvidos
Exerccio n 1
Discretize com dois elementos de dois ns a barra representada na Figura er_4.1. Utilizando a
teoria de Euler-Bernoulli calcule:
a) A matriz de rigidez da estrutura;
b) O vector solicitao da estrutura;
c) Os deslocamentos e as reaces;
d) Os momentos nos pontos nodais;
e) Constate que os momentos so exactos somente nos pontos de Gauss, s1 = 1
3
.
Dados: Ec = 30 Gpa, seco com 0.3 m de largura e 0.5 m de altura.
l2, u l2
50kN/m S
S-S
l1 , u l 1 0.5m
(l 3 , l 3 )
0.3m
4m
S
Figura er_4.1 Viga a ser analisada segundo a teoria de Euler-Bernoulli.
Resoluo
A Figura er_4.2 representa a discretizao da viga com dois elementos de dois ns.
1 2 3
(1) (2)
2m 2m
Figura er_4.2 Viga discretizada com dois elementos de dois ns
a) Clculo da matriz de rigidez da estrutura
Matriz de rigidez de cada elemento
12 6L 12 6L
6L 4 L2 6L 2 L2
K
(e)
= ( EI
3 )
(e)
( L(e) = 2 m )
L
12 6L 12 6L
6 L 2 L2 6L 4 L2
Joaquim Barros 4.21
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
Efectuando o espalhamento das matrizes de rigidez dos elementos, na matriz de rigidez da
estrutura obtm-se,
12 6L 12 6L 0 0 12 12 12 12 0 0
6L 4L 2
6L 2L2
0 0 12 16 12 8 0 0
12 6L 24 0 12 6L 12 12 24 0 12 12
K (E ) = EI
2 = 11719
L3
6L 2 L2 0 8 L2 6L 2L 12 8 0 32 12 8
0 0 12 12 12 6 L 0 0 12 12 12 12
2
0 0 6L 2 L2 6L 4L 0 0 12 8 12 16
Vectores dos deslocamentos dos ns da estrutura:
sendo
du 1 l 2 du 2 l2 du 3 l2
dl 1 dl 1 dl 1
u1 l 2 u 2 l2 u 3 l2
1 2 3
Figura er_4.3 Graus de liberdade.
u1A 2 u1A 2 u 2 A 2 u 2 A 2 u 3 A 2 u 3 A 2
u 1 = du1A = u 2 = du 2 A = u 3 = du 3 A =
dA 2 1A 3 dA 2 2 A 3 dA 2 3A 3
1 1 1
os graus de liberdade dos ns 1, 2 e 3, respectivamente.
b) Clculo do vector solicitao da estrutura
Vector solicitao de cada elemento
l2
50kN/m
l1
(l 3 )
2m
pl 2 pl
M= 12
e R= 2
Joaquim Barros 4.22
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
NOTA: O clculo resulta da aplicao:
N (A 1 )qdA 1 = N ( s1 )q Jds1
(e) (1) ( 2) T T (e)
Q = QA = QA =
L( e ) 1
em que
(e) f A 50
q = 2=
mA 3 0
o vector das foras distribudas no elemento e
N11f N11' f
f
N N12' f
N = 12f
T
N 21 'f
N 21
f 'f
N 22 N 22
a matriz das funes de forma do elemento de viga de dois ns de Euler-Bernoulli. Assim,
50 50
16.67 16.67
Q (1) = Q ( 2) = .
50 50
16.67 16.67
Efectuando o espalhamento dos vectores solicitao do elemento no vector solicitao da
estrutura obtm-se,
50
16 . 67
(E ) 100
Q =
0
50
16 . 67
c) Clculo dos deslocamentos:
(E) (E) (E)
K U =Q +R
Joaquim Barros 4.23
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
12 12 12 12 0 0 0 50 + R1
12 16 12 8 0 0 1A 3 16 .67
12 12 24 0 12 12 u 2A 2
100
11719 =
12 8 0 32 12 8 2 A 3 0
0 0 12 12 12 12 0 50 + R 2
0
0 12 8 12 16 3 A 3 16 .67
Para simplificar o clculo,
(E) (E) (E) (E)
K AA U A = Q A K Af U f
16 12 8 0 1A 3 16.67
12 24 0 12 u 2 A 2 100
11719 = .
8 0 32 8 2A 3 0
0 12 8
16 3A 3 16.67
Resolvendo este sistema de equaes de equilbrio obtm-se,
1A 3 = 0.0014225 rad
u 2A 2 = 0.0017775 m
2 A 3 = 0 rad
3A 3 = 0.0014225 rad
d) Clculo dos momentos nos pontos nodais
duA22
M = EI
dA 12
u A(12) ( s1 ) = N 11f u 1A 2 + N 12f 1A 3 + N 21f u 2 A 2 + N 22f 2 A 3
u A(12) ( s 1 ) = N 12f 1 A 3 + N 21f u 2 A 2
f
du A22 d 2 N 12f d 2 N 21
= 1A + u2A
d A 12 d A 12 3 d A 12 2
d 2 N12f
dA 12
=
4 L
L2 2 2 2
(
1 + 3 s1 = 1 + 3 s1
2 2
) ( )
( )
f
d 2 N 21 4 3
= 2 3 s1 = 2 s1
d A 12 L 2
Joaquim Barros 4.24
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
(
M ( s1 ) = EI 1 + 3 s1
2 2
)( 0.0014225 ) 32 s1 ( 0.0017775 )
Pontos nodais:
s1 = 1 M = 16.75 KN / m
s = 0 M = 66.68 KN / m
1
s = +1 M = 116.6 KN / m
1
e) Constatar que os momentos so exactos somente nos pontos de Gauss, s1 = 1
3
s1 = 1 M = 37.86 KN / m
3
s1 = 3 M = 95.50 KN / m
1
4.2.8 Exerccios para resolver
1 - Na Figura epr_4.1 representa-se um elemento de 1 2 3
viga de Euler-Bernoulli de trs ns. Deduza as funes
de forma deste elemento, em coordenadas = =
normalizadas, s1 . -1 s1 +1
Figura epr_4.1
2 Deduza o vector das foras nodais equivalentes de um elemento de viga de dois ns de
Euler-Bernoulli sujeito a momentos uniformemente distribudos segundo o eixo A 3 (ver Figura
epr_4.2).
A2
m [FL-1]
1 2
L s1 (A 3 ) A1
Figura epr_4.2
3 - a) Determine as foras nodais no n 2, equivalentes aco que actua no elemento finito
de dois ns de Euler-Bernoulli representado na Figura epr_4.3.
b) Como procederia se a viga fosse de seco varivel.
50 kN/m
1 2
5.00 m
Figura epr_4.3
Joaquim Barros 4.25
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
4.3 - Elemento de viga de Timoshenko
A teoria de Timoshenko considera as duas primeiras hipteses da teoria de Euler-Bernoulli
mais a seguinte:
iii) Seces transversais planas e ortogonais ao eixo da viga indeformada permanecem
planas mas no necessariamente ortogonais ao eixo da viga ( ver Figura 4.11).
Esta hiptese representa uma maior aproximao deformao real de vigas de altura
considervel. medida que a relao vo/altura da seco diminui as seces transversais
deixam de se conservar planas aps a deformao.
4.3.1 - Campo de deslocamentos
Os deslocamentos de um ponto qualquer da viga obtm-se por intermdio das seguintes
expresses ( ver Figura 4.11)
u A 1 (A 1 , A 2 , A 3 ) = u A 1 (A 1 , A 2 = 0, A 3 = 0) A 2 A 3 (A 1 , A 2 = 0, A 3 = 0)
u A 2 (A 1 , A 2 , A 3 ) = u A 2 (A 1 , A 2 = 0, A 3 = 0) (4.55)
u A 3 (A 1 , A 2 , A 3 ) = 0
em que uA1 e uA 2 so os deslocamentos de um ponto do eixo da viga.
l2, u l2
(l 3 , l 3 )
u l1 l 1 , u l1
l 3
l2 l 3
l3
l2
Figura 4.11 Deslocamentos num elemento de Timoshenko.
4.3.2 - Campo de extenses
Devido hiptese iii) desenvolvem-se extenses de corte na seco transversal da viga.
Assim, o vector das extenses constitudo por duas componentes,
Joaquim Barros 4.26
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
du A1
A1 dA 1
= = . (4.56)
1 2 du A du A
A A 2
+ 1
dA 1 dA 2
Derivando o campo de deslocamentos e substituindo em ( 4.56) obtm-se
du A 1
d A 3
dA 1 A 2
= + dA 1
du A 2
dA A 3 0 (4.57)
1
= a + f
c 0
em que
d u A1
a = (4.58a)
dA1
a extenso por deformao axial,
d A 3
f = A 2 = A 2 f = A 2 (4.58b)
dA 1
a extenso por deformao de flexo e
duA 2
c = A3 (4.58c)
dA 1
a extenso por deformao de corte. Na figura 4.12 representa-se a deformao de um
elemento de viga de Timoshenko. Constata-se que
duA 2
A = A (4.59)
3 3
dA 1
o angulo mdio devido deformao por corte.
Joaquim Barros 4.27
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
l2, u l2
(l 3 , l 3 )
u l1 l 1 , u l1
du l 2
l 3
dl 1
l3
Deformao real du l 2
dl 1
Deformao admitida
Figura 4.12 Deformao por corte.
4.3.3 - Tenses
O vector das tenses composto por duas componentes,
= [ af c ]T (4.60)
em que
af = A1 (4.61a)
a tenso devida deformao axial mais a deformao por flexo e
c = A A 1 2
(4.61b)
a tenso de corte que actua na seco transversal da viga (plano A 2 A 3 ).
4.3.4 - Lei constitutiva
O vector das tenses ( 4.60) relaciona-se com o vector das extenses (4.57) por intermdio da
seguinte lei constitutiva,
E 0 af
= af = (4.62a)
c 0 G c
Joaquim Barros 4.28
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
ou
A E 0 A1
= 1 = . (4.62b)
A1A 2 0 G A1A 2
Se em (4.62b) a tenso A1 e a extenso A1 forem decompostas nas componentes devidas a
deformao axial e deformao por flexo obtm-se,
a E 0 0 a
= f = 0
'
E 0 f
c 0 0 G c
(4.63)
E a
= E f
G c
pelo que
duA1
a = E
dA 1
f = A 2 E f = A 2 E . (4.64)
du
c = G A A
2
dA 1
3
4.3.5 - Esforos
Os esforos obtm-se por integrao das tenses na seco transversal da viga,
N A1
h / 2 A1
= M A 3 = A 2 A1 dA 2 db
'
VA b
h / 2
A A
2 12 . (4.65)
a
= A 2 f dA 2 db
h/2
h / 2
b
c
Substituindo (4.63) em (4.65) e tendo em conta (4.58b) obtm-se,
Joaquim Barros 4.29
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
Ea
= A 2 E f dA 2 db
h/2
h / 2
b
G c
h/2
h / 2 dA 2 db E a
b
= A 2 dA 2 db E f .
h/2
2
(4.66)
b h / 2
h/2
h / 2 dA 2 db G c
b
b h E a
b h3
= E f
12 *
(bh ) G c
Assim,
N A1 A E a
= M A 3 = I A 3 E f (4.67)
VA G AA* c
2 2
em que
AA*2 = (hb ) = A .
*
(4.68)
a rea reduzida de corte e um factor correctivo introduzido de forma a que o trabalho
por deformao de corte, admitindo tenses e distores constantes na seco transversal, seja
igual ao trabalho real. Note-se que a distribuio real de tenses e extenses de corte numa
seco rectangular no constante, sendo parablica para materiais isotrpicos. No anexo A1
deduz-se a expresso que determina o factor correctivo de corte. Na Figura 4.13 apresenta-se
valores de para algumas seces.
l2
2a 2b l3 t h
=5/6 =6/7 =6/(7+20K2 ) l =0.32
l =0.69
2
2
K=C/(1+C )
C=b/a
Figura 4.13 - Factor correctivo de corte para vrias seces transversais.
Joaquim Barros 4.30
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
Na figura (4.14a) e (4.14b) representam-se as tenses e os esforos que se podem desenvolver
num elemento de viga de Timoshenko.
l2
a f
(l3 ) = +
l1 N l1 M l3
a f
l2
(l3 )
l1
l1 l2 l1 l2
Distribuio Distribuio
aproximada real
l2
(l3 )
l1 N l1 M l3 Vl 2 Vl 2
Esforo Momento Distribuio Distribuio
axial flector aproximada real
Esforo
de corte
Figura 4.14 -Tenses (a) e esforos (b) num elemento de viga de Timoshenko
4.3.6 - Expresso do princpio dos trabalhos virtuais
A expresso do trabalho virtual igual estabelecida em (4.13). Substituindo as expresses
(4.57) e (4.62) na parcela do trabalho interno de deformao virtual obtm-se,
Joaquim Barros 4.31
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
Wint( e ) = dV
T
V (e)
T
+ f E 0 a + f
= a 0 G dV
V (e) c c
. (4.69)
E + E f
[
= aT + Tf cT a dV ]
V (e) G c
= ( E a + aT E f + Tf E a + Tf E f + cT G c dV )
T
a
V (e)
Convertendo o integral de volume em integral de linha, tendo em ateno a relao (4.58b) e
resolvendo o integral de rea resulta,
Wint( e ) = ( )
E A a + Tf E I A 3 f + cT G AA*2 c dA 1 .
T
a (4.70a)
L( e )
Substituindo (4.58) na anterior expresso,
d u A 1 du A 1 d A 3 d A 3
du A 2 duA 2
Wint(e ) = EA + EI A 3 + A 3 GAA*2 A 3 dA 1 . (4.70b)
(e)
L dA 1 dA 1 dA 1 dA 1 dA 1 dA 1
Note-se que em (4.69) so nulas as parcelas seguintes,
h/2 d u A 1 d A 3
E f dV = A 2 b dA 2 dA 1 = 0
T
a E
V (e) L
(e)
h / 2
d A 1 dA 1
. (4.71)
h/2 d A 3 duA1
f E a dV = h / 2
A 2
dA 1
E
dA 1
b dA 2 dA 1 = 0
V (e) L( e )
Em (4.70) a parcela
duA1 duA1
(e) dA 1
EA
dA 1
dA 1 = aT E A a dA 1 .
(e)
(4.72a)
L L
representa o trabalho por deformao axial, a parcela
d A 3 d A 3
dA 1 = f E I A 3 f dA 1 .
T
EI A 3 (4.72b)
L( e )
d A 1 d A 1 L( e )
traduz o trabalho por deformao de flexo e a parcela
duA 2 duA 2
dA 1
A 3 G AA*2
dA 1
A 3 dA 1 = cT G AA*2 c dA 1 .
(4.72c)
L( e ) L( e )
representa o trabalho por deformao de corte.
Joaquim Barros 4.32
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
4.3.7 - Elemento finito de dois ns.
4.3.7.1 - Deslocamentos
Contrariamente ao elemento finito de dois ns utilizado na teoria de Euler-Bernoulli, no
elemento finito de dois ns da teoria de Timoshenko os campos de deslocamentos associados
aos trs graus de liberdade uA1 , uA 2 e A 3 so independentes e de continuidade C0. Assim,
cada grau de liberdade pode ser interpolado com as mesmas funes de forma, pelo que
uA1 ( s1 ) = N1 ( s1 )u1A1 + N 2 ( s1 )u 2A1
uA 2 ( s1 ) = N1 ( s1 )u1A 2 + N 2 ( s1 )u 2A 2 . (4.73)
A ( s1 ) = N1 ( s1 )1A + N 2 ( s1 ) 2A
3 3 3
em que N 1 ( s1 ) e N 2 ( s1 ) so as funes de forma do elemento de dois ns (ver Figura 4.15)
definidas em (3.10 ) e uiA j o deslocamento do n i segundo o eixo A j e iA 3 a rotao do
n i segundo o eixo A 3 .
l 2, u 2
(3 , u 3 ) l 1, u1
N1 (s1) = 1/2(1-s1)
u1 l u2 l
2 2 1 2
u1 l u2 l
1 i j 1
1 2
N 2 (s1) = 1/2(1+s1)
2 l 3
1 l 3
1 2
Figura 4.15 - Elemento de viga de Timoshenko.
Em forma matricial (4.73) fica,
u1A1
u
uA 1 0 2
1A
N1 0 0 N2 0
1A
uA 2 ( s1 ) = 0 N1 0 0 N2 0 3
u2A (4.74)
A
3 0 0 N1 0 0 N 2 1
u2 A 2
2A 3
(e ) (e)
=N U
Joaquim Barros 4.33
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
(e )
em que N a matriz das funes de forma do elemento.
4.3.7.2 - Matrizes de deformao
A extenso axial definida em (4.58a) pode ser reescrita da forma seguinte (ver (3.30))
duA1 ds1 duA1
a = =
dA 1 dA 1 ds1
. (4.75)
2 duA1
=
L ds1
Tendo em conta (4.74), a extenso axial passa a determinar-se pela seguinte relao,
u1A1
u
1A 2
2 dN1 2 dN 2 1A
a (s1 ) = 0 0 0 0 3
L ds1 L ds1 u 2 A1 (4.76)
u2A 2
2 A 3
(e ) (e)
= Ba U
em que (ver (3.21))
(e ) 2 dN1 2 dN 2
Ba = 0 0 0 0
L ds1 L ds1 (4.77)
1 1
= 0 0 0 0
L L
a matriz de deformao axial.
Por sua vez, a curvatura do eixo da viga,
d A3 ds1 d A3
=f = =
dA 1 dA 1 ds1
. (4.78)
2 d A3
=
L ds1
Tendo em conta (4.74) resulta
Joaquim Barros 4.34
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
u1A1
u
1A 2
2 dN1 2 dN 2 1A 3
f (s1 ) = 0 0 0 0
L ds1 L ds1 u2A1 (4.79)
u2A 2
2A 3
(e ) (e)
= Bf U
em que
(e ) 2 dN1 2 dN 2
B f = 0 0 0 0
L ds1 L ds1
(4.80)
1 1
= 0 0 0 0
L L
a matriz de deformao por flexo.
Finalmente, a deformao por corte fica,
du A 2
c = A3
dA 1
ds1 duA 2
= A3 . (4.81)
dA 1 ds1
2 du A 2
= A3
L dA 1
Tendo em conta (4.74) resulta
u1A1
u
1A 2
2 dN1 2 dN 2 1A
c (s1 ) = 0 N1 0 N2 3
L ds1 L ds1 u 2 A1 (4.82)
u2 A 2
2A 3
(e ) (e)
= Bc U
em que
Joaquim Barros 4.35
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
(e ) 2 dN1 2 dN 2
B c = 0 N1 0 N2
L ds1 L ds1 (4.83)
1 1 1 1
= 0 (1 s1 ) 0 (1 + s1 )
L 2 L 2
a matriz de deformao por corte.
4.3.7.3 - Matriz de rigidez
Substituindo (4.76), (4.79) e (4.82) em (4.70a) resulta,
[
Wint( e ) = U ( e ) ] ([B ( ) ] E A B( ) + [B( ) ] E I
T
a
e T
a
e
f
e T
A3
(e )
B f + Bc [ ( )] G A
e T *
A2
(e )
Bc U ) (e)
dA 1 (4.84)
L( e )
em que
[B ] E A B ( ) dA
(e) (e ) T e
ka = a a 1 , (4.85a)
L( e )
[B ] EI
(e) (e ) T (e )
Kf = f A3 B f dA 1 , (4.85b)
(e)
L
e
[B ] GA
(e) (e ) T (e )
kc = c
*
A2 B c dA 1 (4.85c)
(e)
L
so as matrizes de rigidez relativas deformao axial, flexo e corte, respectivamente, pelo
que,
(e) (e) (e) (e)
k =k a + k f + kc . (4.86)
Efectuando os produtos matriciais nas expresses (4.85) e resolvendo os integrais obtm-se,
1 0 0 1 0 0
0 0 0 0 0 0
EA 0 0
(e)
(e) 0 0 0 0
ka = , (4.87a)
L 1 0 0 1 0 0
0 0 0 0 0 0
0 0 0 0 0 0
Joaquim Barros 4.36
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
0 0 0 0 0 0
0 0 0 0 0 0
(e)
EI A 3 0 0 1 0 0 1
=
(e)
kf , (4.87b)
L 0 0 0 0 0 0
0 0 0 0 0 0
0 0 1 0 0 1
0 0 0 0 0 0
L L
0 1 0 1
2 2
L L2
L L2
(e)
GAA 2
* 0 0
kc
(e)
= 2 3 2 6 . (4.87c)
L 0 0 0 0 0 0
L L
0 1 2 0 1
2
L L2 L L2
0 0
2 6 2 3
Somando (4.87a) com (4.87b) e com (4.87c) resulta,
EA EA
L 0 0 0 0
L
GAA*2 GAA*2 GAA*2 *
GAA 2
0 0
L 2 L 2
GAA*2 EI A 3 GAA*2 L GAA*2 EI A 3 LGAA*2
0 + 0 +
k
(e)
= 2 L 3 2 L 6 . (4.88)
EA 0 0
EA
0 0
L L
GAA*2 GAA*2 GAA*2 GAA 2*
0 0
L 2 L 2
GAA*2 LGAA*2
EI A 3 GAA*2 EI A 3 LGAA*2
0 + 0 +
2 L 6 2 L 3
(e ) (e ) (e ) (e )
Se a matriz B agregar as submatrizes B a , B f e B c ,
B
(e )
= Ba[ (e )
Bf
(e )
Bc
(e )
]
T
(4.89)
e a matriz constitutiva incluir as submatrizes associadas deformao axial ( Da = EA ),
deformao de flexo ( D f = EI A 3 ) e deformao de corte ( Dc = GAA*2 ),
Joaquim Barros 4.37
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
Da 0 0 EA 0 0
D = 0 Df
0 = 0 EI A 3 0 , (4.90)
0 0 Dc 0 0 GAA*2
ento a matriz de rigidez de um elemento pode ser obtida por intermdio da seguinte relao,
[B ] D B ( ) dA
(e) (e ) T e
k = 1
L( e )
. (4.91)
= B
+1
1
[ ] DB(e ) T (e ) L
2
ds1
4. 3.8 - Efeito de "Locking"
Os integrandos de todos os termos da matriz de rigidez associada deformao axial, K a , so
polinmios de grau nulo. Por exemplo, a fora necessria para aplicar um deslocamento
unitrio segundo o primeiro grau de liberdade da barra, quando os restantes so nulos,
obtm-se de,
+1 L
k a11 = Ba1 E A Ba1 ds1
1 2 (4.92)
EA +1
2 L 1
= ds1
em que o valor de Ba1 foi retirado de (4.77). O mesmo acontece com a matriz de rigidez
associada a deformao de flexo, dado que, por exemplo,
+1 L
k f 33 = B f 3 E I A 3 B f 3 ds1
1 2
. (4.93)
EI A 3 +1
=
2L 1
ds1
Contudo, no clculo da matriz de rigidez associada a deformao de corte, k c , surgem
coeficientes cujos integrandos so polinmios de segundo grau. exemplo disto o coeficiente
k c33 ,
+1 L
kc33 = Bc3 G AA*2 Bc3 ds1
1 2
. (4.94)
L G AA*2 +1 1
=
2 1 4
(1 s1 ) 2 ds1
(e )
Assim, a aplicao da integrao Numrica de Gauss-Legendre no clculo de k requer 1
(e ) (e ) (e )
ponto de Gauss (PG) para determinar k a e k f e 2 PG para calcular k c (ver Quadro 3.1).
Joaquim Barros 4.38
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
Para se avaliar o efeito da integrao numrica no comportamento em termos de rigidez
apresentada por um elemento de viga de Timoshenko vai-se estudar a consola representada na
Figura 4.16. Esta consola discretizada com um nico elemento de dois ns. Neste estudo
vai-se desprezar os termos associados a deformao axial, dado no existir deformao axial
para o carregamento actuante.
S
l2 S-S
F
l1
(l 3 ) E, A h
1
L
S
u1 l u2 l
2 2
1 3
(1)
2 l 3
1 l 3
Figura 4.16 - Consola discretizada com um elemento de viga de Timoshenko.
Desprezando-se a matriz de rigidez afecta deformao axial, as equaes de equilbrio do
elemento so
[k ( )1
f kc U
(1)
] (1)
=Q .
(1)
(4.95)
(1) (1)
Utilizando 1 PG e 2 PG para calcular k f e k c , respectivamente, (4.95) fica,
GAA*2 GAA*2 GAA*2 GAA*2
L* 2 L 2
GAA 2 EI A 3LGAA*2 GAA*2 EI A 3 LGAA*2 u1A 2 R1
+ +
2 L 3 2 L 6 1A 3 = R2 (4.96)
GA* u
A 2
GAA*2 GAA*2
GAA*2 2 A 2 F
L 2 L 2 2 A 3 0
GAA* EI A 3 LGAA*2 GAA*2 EI A 3 LGAA 2 *
2
+ +
2 L 6 2 L 3
em que R1 e R2 so a fora de reaco segundo A 2 e o momento de reaco segundo A 3 , no n
1. Como u1A 2 = 1A 3 = 0 , resulta
GAA*
GAA*2
2
u2 A F
L 2 2 = (4.97)
A 2 2 A 3
* *
GAA 2 EI A 3 LGA 0
2 L
+
3
Joaquim Barros 4.39
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
pelo que
L L3 L2
u2 A 2 * +
GAA 2 3EI A 3 EI A 3 F
=
2A 3 + 1 L2 L 0 (4.98)
EI A 3 EI A 3
= FQ
em que F a matriz de flexibilidade. Da resoluo de (4.98) obtm-se
L L3
( F )
u2 A 2 = + (4.99)
+ 1 GAA*2 3EI A 3
em que
2
h 3
= 3 = 2 (4.100)
L
sendo
L
= (4.101)
h
o parmetro denominado de esbelteza da viga. No caso de viga de seco rectangular
I A 3 = (1 h 3 ) 12 e AA*2 = 5 6 (1 h ) .
Se a consola fosse discretizada com um elemento de viga de Euler-Bernoulli a matriz de
flexibilidade da estrutura seria,
L3 L2
3EI 2 EI A 3
F = 2 A3 (4.102)
L L
2 EI EI A 3
A3
em que no se considera a efeito do esforo transverso.
Utilizando a convencional teoria das estruturas, baseada na teoria de Euler-Bernoulli, e
considerando a deformao por corte, a matriz de flexibilidade da estrutura apresenta a
configurao seguinte,
Joaquim Barros 4.40
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
L L3 L2
GA* + 3EI 2 EI A 3
F = A2 2 A3 . (4.103)
L L
2 EI A 3 EI A 3
Assim, o deslocamento u2A 2 obtido em (4.102) e em (4.103)
(u ) EBsc
2 A 2 exacto =
L3
3EI A 3
F (4.104)
no caso de se utilizar a formulao de Euler-Bernoulli sem incluso da influncia do corte, e
L
(u ) EBcc
2 A 2 exacto = * +
GA
L3
3EI A 3
F
(4.105)
A2
no caso em que a deformao por corte foi tida em conta.
Efectuando o cociente entre (4.99) e (4.104) obtm-se,
L L3
+
u2A 2 GA*A 3EI A 3
= =
(u )
2
E
2 A 2 exacto +1 L3
. (4.106)
3EI A 3
=
(
3 42 + 3 )
(
42 2 + 3 )
O valor de deveria tender para a unidade com o aumento de (esbelteza da viga), dado que
com o aumento de a influncia de deformao de corte diminui, pelo que u2 A 2 dever-se-ia
( )
aproximar de u2A 2
EBsc
exacto
. Contudo, tal no acontece, como se pode constatar na Figura 4.18.
Verifica-se que para vigas muito esbeltas, isto , quando tende para infinito, tende para
zero, dado que a soluo obtida com o MEF, utilizando a integrao exacta no clculo da
matriz de rigidez tende para o valor nulo. Isto significa que o elemento de viga de
Timoshenko de dois ns incapaz de reproduzir, no limite (vigas muito esbeltas), a soluo
que se obtm com a convencional teoria das estruturas (teoria de Euler-Bernoulli sem
deformao por corte). medida que a esbelteza aumenta ocorre um fenmeno de
sobrerigidez numrica que vai aumentando com , at tornar a estrutura infinitamente rgida.
Assim, verifica-se que o elemento de viga de Timoshenko, com integrao completa (ou
exacta) permite obter resultados aceitveis apenas para valores reduzidas de .
Um dos procedimentos para resolver este problema consiste em diminuir a influncia da
(e)
rigidez de corte, por intermdio de uma subintegrao dos termos de K c , utilizando um
Joaquim Barros 4.41
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
nmero de pontos de integrao inferior ao necessrio para o seu clculo exacto. Ao
subintegrar-se determinada matriz de rigidez est-se a aumentar a flexibilidade do elemento.
Figura 4.18 Influncia do n de PG utilizados na integrao da matriz de rigidiz de uma viga discretizada com
um elemento de Timoshenko.
(e)
Assim, ao subintegrarem-se os termos de k c est-se a compensar a excessiva rigidez
(e)
introduzida em k c pelos termos de corte.
(e)
Integrando k c com um ponto de Gauss obtm-se,
(e )
L L
1 1
2 2
L L2 L L2
GAA*2
(e)
k
(e)
= 2 4 2 4 . (4.107)
c L L L
1 1
2 2
L L2 L L2
2 4 2 4
Utilizando (4.107) em vez de (4.87c) no anterior exemplo, as relaes (4.97) e (4.98) passam
a apresentar a seguinte forma,
Joaquim Barros 4.42
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
GAA* GAA*2
2
L* 2 u2 A 2 = F (4.108a)
GAA 2 EI A LGAA 2 2 A 0
*
3
+ 3
2 L 4
ou
(e) (e) (e)
k U =Q (4.108b)
L L3 L2
* +
u2 A 2 GAA 2 4 EI A 3 2 EI A 3 F
=
(4.109a)
2A 3 L2 L 0
2 EI A 3 EI A 3
ou
(e) (e) (e)
U =F Q . (4.109b)
Verifique-se que F coincide agora com a expresso (4.103), excepto no coeficiente F11.
Calculando u2A 2 por intermdio de (4.109) obtm-se,
L
(u ) = F
2A 2 11 F = * +
GA
L3
4 EI A 3
F .
(4.110)
A2
A relao entre este valor e o exacto, obtido com um elemento de Euler-Bernoulli (sem
deformao por corte) fica,
u2 A 2 32 + 3
= = . (4.111)
(u ) EBsc
2 A 2 exacto
42
que se representa na Figura 4.18. Verifica-se que tende para 0.75 quando tende para
(e )
infinito, pelo que a sobrerigidez devida ao corte desapareceu com a subintegrao de k c .
A excessiva rigidez introduzida pela integrao exacta dos termos da rigidez de corte
denomina-se na nomenclatura Inglesa de "Locking".
(e ) (e )
Por sua vez, ao integrar-se exactamente os termos de k a e k f e subintegrar-se os termos de
(e )
k c , est-se a aplicar a denominada integrao selectiva, dado que completa nos termos de
(e ) (e ) (e )
k a e k f e reduzida nos termos de k c .
Joaquim Barros 4.43
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
Da anlise da Figura 4.18 e da expresso (4.111) verifica-se que, com um elemento a
discretizar a consola, o resultado obtido no exacto. Contudo, se a consola for discretizada
com mais elementos a soluo converge rapidamente para a exacta, conforme se pode
constatar no Quadro 4.1.
Quadro 4.1 - Evoluo do erro com a discretizao da consola
Valores de = A /h
Nmero de
1 2 4 8 16
elementos
u 2
= E 2AEBsc
( )
u 2A 2 exacto
0.750 0.938 0.984 0.996 0.996
4.3.9 Exerccios resolvidos
Exerccio n 1
Discretizando a consola representada na Figura er_4.3 em um elemento finito de trs ns de
Timoshenko:
a) Calcule a matriz de rigidez desse elemento utilizando a integrao selectiva;
b) Considerando os resultados obtidos com a integrao selectiva, determine os
deslocamentos e os esforos para a aco aplicada na consola.
c) Traar um grfico que relacione a flecha na consola com o parmetro em que,
u3 A 2
= ( EBsc )
(u3A 2 ) exacto
sendo
FL3
(u3A 2 ) (exacto
EBsc )
=
3EI A 3
Dados: L=10 m; E= 30 GPa; F=100 kN; A= 11 m2
A2 A3 F
A1
E, I A 3
L
Figura er_4.3 Consola sujeita a uma fora concentrada F na sua extremidade livre.
Resoluo:
Joaquim Barros 4.44
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
a) Clculo da matriz de rigidez de um elemento de trs ns utilizando a integrao selectiva
Graus de liberdade do elemento de Timoshenko de trs ns:
A2
u1A 2 1A 3 u 2A 2 2A 3 u 3A 2 3A 3
u1A1 u 2A 1 u 3A1 A1
Campo de deslocamentos:
u A1 ( s1 ) = N 1 ( s1 )u1A1 + N 2 ( s1 )u 2 A1 + N 3 ( s1 )u 3A1
u A 2 ( s1 ) = N 1 ( s1 )u1A 2 + N 2 ( s1 )u 2A 2 + N 3 ( s1 )u 3A 2
A 3 ( s1 ) = N 1 ( s1 ) 1A 3 + N 2 ( s1 ) 2A 3 + N 3 ( s1 ) 3A 3
Sob a forma matricial:
u1A1
u1A 2
1A
3
u A1 N1 0 0 N2 0 0 N3 0
0 u 2A1
u A ( s1 ) = 0
N1 0 0 N2 0 0 N3 0 u 2 A 2
2
0 0 N1 0 0 N2 0 0 N 3 2A 3
A3
u 3A 1
u 3A 2
3A
3
Matriz de rigidez correspondente a deformao axial:
2 dN 1 2 dN 2 2 dN 3
Ba = 0 0 0 0 0 0
L ds1 L ds1 L ds1
Joaquim Barros 4.45
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
2 1 2 2 1
B a = ( s1 ) 0 0 (2s1 ) 0 0 ( s1 + ) 0 0
L 2 L L 2
1
L
B
(e) T T
Ka = B a EAB a dA 1 = a EAB a ds1
L( E ) 1
2
Calculando os termos no nulos:
1 1
L EAL 4 1 7 EA
T
K a1,1 = B a1 EAB a1 ds1 = 2
( s1 ) 2 ds1 =
1
2 2 1 L 2 3 L
1 1
L EAL 2 1 2 8 EA
T
K a1, 4 = B a1 EAB a4 ds1 = ( s1 ) (2 s1 )ds1 =
1
2 2 1 L 2 L 3 L
1 1
L EAL 2 1 2 1 1 EA
T
K a1, 7 = B a1 EAB a7 ds1 = ( s1 ) ( s1 + ) ds1 =
1
2 2 1 L 2 L 2 3 L
1 1
L EAL 4 2 16 EA
T
K a4 , 4 = B a4 EAB a4 ds1 = 4 s1 =
1
2 2 1 L2 3 L
1 1
L EAL 2 2 1 8 EA
T
K a4 , 7 = B a4 EAB a7 ds1 = (2 s1 ) ( s1 + ) ds1 =
1
2 2 1 L L 2 3 L
1 1
L 2 EA 1 1 7 EA
T
K a7 , 7 = B a7 EAB a7 ds1 = ( s1 + )( s1 + )ds1 =
1
2 L 1 2 2 3 L
Ento:
7 0 0 8 0 0 1 0 0
0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0
8 0 0 16 0 0 8 0 0
EA
Ka = 0 0 0 0 0 0 0 0 0
3L
0 0 0 0 0 0 0 0 0
1 0 0 8 0 0 7 0 0
0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0
Matriz de rigidez correspondente a deformao flexo:
Joaquim Barros 4.46
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
2 dN 1 2 dN 2 2 dN 3
B f = 0 0 0 0 0 0
L ds1 L ds1 L ds1
2 1 2 2 1
B f = 0 0 ( s1 ) 0 0 (2 s1 ) 0 0 ( s1 + )
L 2 L L 2
1
L
B
(e) T T
Kf = Bf EI A 3 B f dA 1 = f EI A 3 B f ds1
L( e ) 1
2
Efectuando procedimento similar ao anterior obtm-se a matriz de rigidez relativa flexo:
0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0
0 0 7 0 0 8 0 0 1
0 0 0 0 0 0 0 0 0
EI A 3
K
(e)
= 0 0 0 0 0 0 0 0 0
3L
f
0 0 8 0 0 16 0 0 8
0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0
0 0 1 0 0 8 0 0 7
Matriz de rigidez correspondente a deformao corte:
2 dN 1 2 dN 2 2 dN 3
B c = 0 N1 0 N2 0 N3
L ds1 L ds1 L ds1
2 1 1 2 2 1 1
B c = 0 ( s1 ) s1 ( s1 1) 0 ( 2s1 ) (1 s12 ) 0 ( s1 + ) s1 ( s1 + 1)
L 2 2 L L 2 2
1
L
B
(e) T T
Kc = B c GAA*2 B c dA 1 = *
c GAA 2 Bc ds1
L( e ) 1
2
Elementos no nulos resultantes do produto B Tc B c :
Joaquim Barros 4.47
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
2,2 2,3 2,5 2,6 2,8 2,9
3,3 3,5 3,6 3,8 3,9
5,5 5,6 5,8 5,9
6,6 6,8 6,9
8,8 8,9
9,9
1
L LGAA*2 1
2 1 2 1 7 GAA 2
*
T
K c2 , 2 = B c2 GAA*2 B c2 ds1 = ( s1 ) ( s1 )ds1 =
1
2 2 1
L 2 L 2 3 L
Seguindo o mesmo raciocnio obtm-se:
GAA*2 *
8 GAA 2 2 *
GAA*2 GAA*2
K c2 , 3 = ; K c2 , 5 = ; K c2 , 6 = GAA 2 ; K c2 ,8 = ; K c2 , 9 =
2 3 L 3 3L 6
*
2 2 1 GAA 2 1
K c3, 3 = LGAA*2 ; K c3, 5 = GAA*2 ; K c3, 6 = LGAA*2 ; K c3,8 = ; K c3, 9 = GAA*2
15 3 15 6 30
* *
16 GAA 2 8 GAA 2 2
K c5 , 5 = ; K c5 , 6 = 0 ; K c5,8 = ; K c5, 9 = GAA*2
3 L 3 L 3
8 2 L
K c6 , 6 = LGAA*2 ; K c6 ,8 = GAA*2 ; K c6 , 9 = GAA*2
15 3 15
* *
7 GAA 2 GAA 2
K c8,8 = ; K c8, 9 =
3 L 2
2
K c9 , 9 = GAA*2
15
Somando as submatrizes de rigidez associadas a deformao axial, de flexo e corte, obtm-se
a matriz de rigidez de um elemento de trs ns de Timoshenko:
Joaquim Barros 4.48
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
7 EA 8 EA 1 EA
3 L
3 L 3 L
* * * *
7 GAA 2 1 GAA 2 8 GAA 2 2 * 1 GAA 2 1
GAA 2 GAA*2
3 L 2 L 3 L 3 3 L 6
7 EI A 3 2 2 8 EI A 3 1 1 * 1 EI A 3 1
+ LGAA*2 GAA*2 + LGAA*2 GAA 2 GAA*2
3 L 15 3 3 L 15 6 3 L 30
16 EA 8 EA
3 L 3 L
16 GAA 2
*
8 GAA 2
*
2 *
0 GAA 2
3 L 3 L 3
16 EI A 3 8 2 8 EI A 3 1 *
+ LGAA*2 GAA*2 + LGAA 2
3 L 15 3 3 L 15
7 EA
3 L
*
7 GAA 2 1
GAA 2 *
3 L 2
7 EI A 3 2
+ GAA*2
3 L 15
b) Clculo dos deslocamentos:
(E) (e) (e) (e)
K = Ka + K f + Kc
(E) (E) (E)
K U =Q
16 GAA*2 8 GAA 2
*
2 *
0 GAA 2
3 L 3 L 3 u 2A 0
16 EI A 3 8 L 2 8 EI A 3 L *
2
0 + GAA*2 GAA*2 + GAA 2 0
3 L 15 3 3 L 15 2A 3
GAA*2 * u = F
8 2 7 GAA 2 1 3A 2
GAA*2 GAA 2 *
3 L 3 3 L 2 3A 3 0
2 * 8 EI A 3 L 1 7 EI A 3 2
GAA 2 + GAA*2 GAA*2 + GAA*2
3 3 L 15 2 3L 15
Clculo das caractersticas mecnicas da estrutura:
A = 11 = 1 m 2
5
A* = A = 0.8333 m 2
6
E
G= = 15 GPa
2(1 + )
I A 3 = 0.08333 m 4
Resolvendo o sistema de equaes de equilbrio obtm-se:
Joaquim Barros 4.49
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
u 2A 2 = 0.0027 m
2A 3 = 0.0011 m
u = 0.0104 m
3A 2
= 0.0020 m
3A 3
b) Traar um grfico que relacione a flecha com o parmetro :
FL3
(u 2( EA 2) ) exacto = = 0.00111 m
3EI A 3
Calculo do parmetro :
u 2A 2 0.0027
= = = 2.4545 (com L=10 m)
(u 2( EA 2) ) exacto 0.0011
u 2A 2 0.0004
= = = 0.364 (com L=5 m)
(u 2( EA 2) ) exacto 0.0011
40
30
20
FI
10
0
5 10 15 20 25
L/h
Joaquim Barros 4.50
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
Exerccio n 2
Discretize o prtico plano representado na Figura 4.24 por dois elementos de Timoshenko de
dois ns. Utilizando a integrao selectiva no clculo da matriz de rigidez dos elementos da
estrutura e a integrao exacta no clculo dos esforos, determine:
a) A matriz de rigidez da estrutura;
b) O vector solicitao da estrutura;
c) Os deslocamentos e reaces;
d) Os esforos.
Dados:
EC = 30 GPa
= 0.0
Km = 500000 KN/m
100kN/m
200kN
km
0.6m 45
3m
0.3m
0.005m
4m 6m
Figura 4.24 Prtico plano (teoria de Timoshenko).
Resoluo:
a) Clculo da matriz de rigidez da estrutura
Clculo das caractersticas mecnicas da estrutura:
A = 0.30.6 = 0.18 m2
4
I = 0 .312 3
0 .6
= 0 . 0054 m
G= E
2 (1 + )
= 15 10 6 KPa
5
A* = 6
A = 0.15 m2 (rea reduzida de corte)
Deslocamentos na estrutura em cada n:
Matriz de rigidez para cada elemento incluindo a rigidez por deformao axial, flexo e corte:
Joaquim Barros 4.51
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
g2 2 g3 3 g3
u 2 g2 u 3 g2
u 2 g1 u 3 g1
2 (2) 3
(1)
u1 g 2 1 g3
1
u1 g1 g1
(g 3 )
Clculo da matriz de transformao, T Ag :
1
l
3
l
2
l
(1)
36.87
u1 g 2 u1 g 3
1
u 1 g1
(g 3 )
Ento:
g1 cos sen 0 A 1
g 2 = sen cos 0 A 2
g 3 0 0 1 A 3
cos sen 0 0 0 0 0.8 0.6 0 0 0 0
sen cos 0 0 0 0 0.6 0.8 0 0 0 0
0 0 1 0 0 0 0 0 1 0 0 0
TAg = =
0 0 0 cos sen 0 0 0 0 0.8 0.6 0
0 0 0 sen cos 0 0 0 0 0.6 0.8 0
0 0 0 0 0 1 0 0 0 0 0 1
Rigidez da mola no referencial global:
Joaquim Barros 4.52
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
g m
K m = T Ag K m T Ag [ ]
m T
em que
m
cos sen
T Ag =
sen cos
cos 2 cos sen 0.5 0.5
K
g
m = Km = Km ( = - 45 )
cos sen sen 2 0.5 0.5
Clculo da matriz de rigidez do elemento 1, 2 e da mola:
(1)
K g = T Ag K A T Ag
(1)
[ ] T
( 2)
Kg = KA
( 2)
(=0)
853200 302400 675000 853200 302400 675000
302400 676800 900000 302400 676800 900000
675000 900000 2844900 675000 900000 2780100
(1)
Kg =
853200 302400 675000 853200 302400 675000
302400 676800 900000 302400 676800 900000
675000 900000 2780100 675000 900000 2844900
Joaquim Barros 4.53
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
900000 0 0 900000 0 0
0 375000 1125000 0 375000 1125000
0 1125000 3402000 0 1125000 3348000
( 2)
Kg =
900000 0 0 900000 0 0
0 375000 1125000 0 375000 1125000
0 1125000 3348000 0 1125000 3402000
250000 250000
Km =
250000 250000
Efectuando o espalhamento das matrizes de rigidez dos elementos na matriz de rigidez da
estrutura obtm-se:
853200 302400 675000 853200 302400 675000 0 0 0
302400 676800 900000 302400 676800 900000 0 0 0
675000 900000 2844900 675000 900000 2780100 0 0 0
853200 302400 675000 1753200 302400 675000 900000 0 0
= 302400
(g)
Kg 676800 900000 302400 1051800 225000 0 375000 1125000
675000 900000 2780100 675000 225000 6246900 0 1125000 3348000
0 0 0 900000 0 0 1150000 250000 0
0 0 0 0 375000 1125000 250000 625000 1125000
0 0 0 0 1125000 3348000 0 1125000 3402000
b) Clculo do vector solicitao:
l2
100kN/m
l1
l3
6m
pl 2 pl
M= 12
e R= 2
Joaquim Barros 4.54
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
0
0
0
200
(mal calculado ??????)
= 300
(E)
Qg
300
0
300
300
c) Clculo dos deslocamentos e reaces:
(E) (E) (E)
K u =Q +R
853200 302400 675000 853200 302400 675000 0 0 0 0 R1
302400 676800 900000 302400 676800 900000 0 0 0 0.005 R2
675000 900000 2844900 675000 900000 2780100 0 0 0 0 R3
853200 302400 675000 1753200 302400 675000 900000 0 0 u 200
2A 1
302400 676800 900000 302400 1051800 225000 0 375000 1125000 u2A 2 = 300
675000 900000 2780100 675000 225000 6246900 0 1125000 3348000 u2A 3 300
0 0 0 900000 0 0 1150000 250000 0 u3A 1 0
0 0 0 0 375000 1125000 250000 625000 1125000 u3A 2 300
0 0 0 0 1125000 3348000 0 1125000 3402000 u3A 3 300
Para simplificar o calculo:
(E) (E) (E) (E)
K AA u A = Q A K Af u f
Resolvendo este sistema de equaes de equilbrio obtm-se:
Joaquim Barros 4.55
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
R1 = 132.55 KN
R2 = 266.7 KN
R3 = 473.3KN .m
u = 0.0064038 m
2A1
u 2A 2 = 0.013949 m
u 2A 3 = 0.00428163 rad
u 3A 1 = 0.006034101 m
u 3A = 0.00470304 m
2
u = 0.01047012 rad
3A 3
d) Clculo dos esforos
Para um elemento de dois ns s existe 1 ponto de Gauss (s1 = 0):
Momento flector:
dN1
M (1) = EI f = EI ( L2 ) uf
ds1 s1 = 0
2 1 2 1
M (1) = EI ( )( )ue + EI ( )( )u d = 32400 0 + 32400 (0.00428163) = 138.7 KN .m
L 2 L 2
dN1
M ( 2) = EI f = EI ( L2 ) uf
ds1 s1 = 0
2 1 2 1
M ( 2) = EI ( )( )ue + EI ( )( )ud = 27000 (0.00428163) + 27000 0.01047012 = 398.3 KN .m
L 2 L 2
Esforo axial:
Joaquim Barros 4.56
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
dN 1
N (1) = EA a = EA( L2 ) uf
ds1 s1 = 0
2 1 2 1
N (1) = EA( )( )u e + EA( )( )u d = 1080000 (0.003) + 1080000 (0.00324376) = 263.2 KN
L 2 L 2
dN 1
N ( 2) = EA a = EA( L2 ) uf
ds1 s1 = 0
2 1 2 1
N ( 2) = EA( )( )u e + EA( )( )u d = 900000 0.0064038 + 900000 0.006034101 = 332.7 KN
L 2 L 2
4.3.10 Exerccios para resolver
1- A altura da viga biencastrada representada na Figura 1 varia de forma parablica de 2
metros em x1=0 at 1 metro em x1=10 metros. Na viga actua uma carga distribuda
parabolicamente, cujos valores se representam na figura 2. Discretizando a estrutura em dois
elementos de 3 ns e utilizando a teoria de Tismoshenko determine:
a) a matriz de rigidez de um elemento aplicando a integrao reduzida de Gauss-Legendre;
b) o vector das foras nodais equivalentes aco que actua no elemento;
Dados: largura da viga=0.5 m; mdulo de elasticidade do material=30 GPa.
200 kN
100 kN 100 kN
x2
0.5m
1.0m
x1
10m 10m
Figura 1
2 Admita que as barras 2 e 3 do prtico plano representado na Figura 2 so discretizadas por um
elemento finito de 3 ns e a barra 1 discretizada por um elemento finito de 3 ns de barra
biarticulada. Utilizando a formulao de Timoshenko e adoptando a integrao reduzida:
a) calcule a submatriz de rigidez relativa ao n C;
b) calcule as foras nodais no n C, no referencial global, equivalentes s aces que actuam na
estrutura;
c) calcule os esforos de flexo nos pontos de Gauss do elemento que discretiza a barra 2, admitindo
que os deslocamentos do n B, C e E , no referencial global, so os seguintes:
N B: u x1 = 0.0 m ; u x2 = 2.6919e 04 m ; x3 = 2.1632e 04 rad .
N E u x1 = 1.9258e 04 m ; u x2 = 6.23e 06 m ; x3 = 2.4807e 04 rad .
N C u x1 = 5.7424e 05m ; u x2 = 1.8049e 04m ; x3 = 6.7355e 04 rad .
Joaquim Barros 4.57
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
d) com base nos momentos flectores obtidos nos pontos de Gauss, determinados na alnea anterior,
calcule os momentos no n B. Comente os resultados obtidos.
Dados: barras 2 e 3: b=1.0 m, h=0.3 m; E=30 GPa, = 0.0
Barra 1: rea=0.1 m2, E=200GPa, = 0.0
B 30kN/m
3.00m 2
E
30kN/m
3
x2 C D
3.00m 1
x1
A
(x3 )
4.00m 3.00m
Figura 2
3 O eixo da estrutura representada na Figura 1 descrito pela equao
5
x2 = ( x1 )2 + x1
100
e a espessura da estrutura determina-se segundo a equao
1.25
h= ( x1 )2 25 x1 + 1.5 .
100 100
Discretizando a estrutura com um elemento de 3 ns e utilizando a formulao de
Timoshenko, calcule o deslocamento vertical do n 3 devido actuao do peso prprio da
estrutura. Despreze a deformabilidade axial da estrutura e utilize a integrao reduzida no
clculo da matriz de rigidez do elemento.
Dados:
Peso especfico do material constituinte da estrutura=25 kN/m3;
Largura da estrutura = 1.0 m;
Mdulo de elasticidade longitudinal do material constituinte da estrutura = 30 GPa;
Coeficiente de Poisson=0.0.
x2
0.25m
3
5.00 m
1 x1
1.50 m
5.00 m 5.00 m
Joaquim Barros 4.58
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
Figura 3
1 O prtico plano representado na Figura 1 foi discretizado em 3 elementos de 3 ns. Utilizando a
formulao de Timoshenko e a integrao reduzida obtiveram-se os deslocamentos nos ns da
estrutura apresentados no Quadro 1.
a) Calcule o esforo axial num ponto de Gauss do elemento que discretiza a barra 1;
b) Calcule o momento flector num ponto de Gauss do elemento que discretiza a barra 2;
c) Calcule o esforo de corte num ponto de Gauss do elemento que discretiza a barra 3;
d) Com base nos esforos indicados no Quadro 2, extrapole os momentos flectores para o n 2 e os
esforos de corte para o n 7.
Dados:
Mdulo de elasticidade longitudinal do material constituinte da estrutura = 30 GPa;
Coeficiente de Poisson=0.0;
Largura das barras = 0.7 m;
A variao da altura das barras a representada na Figura 2.
100 kN/m
2 4 5 6 7
2 3
Variao da altura da seco dos elementos finitos
- Elementos 1 e 2
i+2
5.00 m
i i+1
1 3
b = 0.70 m h = 0.50 m h = 0.75 m h = 1.00 m
E = 30 GPa - Elemento 3
i i+1 i+2
1
h = 0.75 m h = 0.50 m
h = 1.00 m
5.00 m 8.00 m
Figura 1
Quadro 1
*** Nodal displacements:
(global coordinate system)
Point number (ipoin)
X1 displacement (delta-x1)
X2 displacement (delta-x2)
Theta-x3 rotation (delta-tx3)
ipoin delta-x1 delta-x2 delta-tx3
1 0.00000000 0.00000000 0.00149995
2 0.00081408 0.00000000 0.00059338
3 -0.00200657 0.00121595 -0.00028815
4 0.00081408 0.00066868 -0.00030253
5 0.00081408 -0.00216944 -0.00225808
6 0.00047488 -0.02106080 -0.00555692
7 0.00000000 -0.03526722 0.00000000
(unidades: deslocamentos em metros e rotaes em radianos)
Joaquim Barros 4.59
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
Quadro 2
*** Resultant stresses in the Gauss points:
(local coordinate system)
(same sign convention for any Gauss point)
Element number (ielem)
Gauss point number for axial forces (igsta)
Gauss point number for bending moments (igstb)
Gauss point number for shear forces (igsts)
Gauss point global coordinates for axial forces (gpcot_a)
Gauss point global coordinates for bending moments (gpcot_b)
Gauss point global coordinates for shear forces (gpcot_s)
L1 axial force (Nl1)
L2 shear force (Nl2)
L3 bending moment (Ml3)
ielem igsta Nl1 gpcot_a
igsts Nl2 gpcot_s
igstb Ml3 gpcot_b
1 1 -2055.62134239 1.05662433 1.05662433
1 2 -2055.62134239 3.94337567 3.94337567
1 1 127.02127549 1.05662433 1.05662433
1 2 127.02127549 3.94337567 3.94337567
1 1 189.80693341 1.05662433 1.05662433
1 2 708.36911911 3.94337567 3.94337567
2 1 0.00000000 1.05662433 5.00000000
2 2 0.00000000 3.94337567 5.00000000
2 1 169.38861820 1.05662433 5.00000000
2 2 458.06375280 3.94337567 5.00000000
2 1 123.15738629 1.05662433 5.00000000
2 2 1028.80687455 3.94337567 5.00000000
3 1 -1543.36139601 6.69059892 5.00000000
3 2 -1543.36139601 11.30940108 5.00000000
3 1 -630.94010768 6.69059892 5.00000000
3 2 -169.05989232 11.30940108 5.00000000
3 1 1257.23407740 6.69059892 5.00000000
3 2 -590.28678401 11.30940108 5.00000000
(unidades: kN, kN.m, m)
1 A estrutura representada na Figura 1 est descretizada em 4 elementos de 3 ns de Timoshenko.
a) Desprezando a deformabilidade axial das barras e utilizando a integrao reduzida, calcule os
coeficientes de rigidez relativos ao n B.
b) Calcule as foras nodais equivalentes no n B.
Joaquim Barros 4.60
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
c) Considerando dois pontos de Gauss por elemento, calcule os esforos de flexo e de corte no
elemento n 1, sabendo que os deslocamentos dos ns deste elemento, no referencial global, so os
seguintes :
N deslocamento segundo x1 deslocamento segundo x2 rotao segundo x3
1 0.00000000 0.00000000 -0.00084618
2 -0.00000000 -0.00091344 -0.00056319
3 -0.00000000 -0.00127759 0.00003270
d) Com base nos esforos do elemento n 1 , determine o momento no n A. Se os resultados no lhe
parecem aceitveis, explique como procederia para melhorar os resultados obtidos.
Dados: b=0.3 m, h=0.7 m; E=30 GPa, = 0.0
Mola: k m = 500 000 kN / m
100 kN
x2
A 1 2 3 4 B 5 50 kN/m
6
1 2
3.00 m
7
km = 500 000kN/m 3
8
C x1
4 9
x3
5.00 m 4.00 m
Figura 1
1 Discretizando a consola representada na Figura 1 em dois elementos de 3 ns de
Tismoshenko, de igual comprimento, calcule:
a) A matriz de rigidez da estrutura;
b) O vector das foras nodais equivalentes, admitindo que a barra est submetida ao seu
peso prprio, a foras distribudas por unidade de comprimento de valor igual a 50
kN/m e a uma fora concentrada de 100 kN aplicada na extremidade livre da consola;
c) O deslocamento vertical da extremidade livre da consola;
d) As reaces;
e) O momento flector e o esforo transverso no ponto de Gauss mais prximo da seco
de encastramento. Admita que os deslocamentos dos ns 2 e 3, no referencial global,
so os seguintes:
N Deslocamento segundo x2 (m) Rotao segundo x3 (rad.)
2 -0.00820588 -0.00735665
3 -0.04257247 -0.02090955
Joaquim Barros 4.61
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
f) Determine os momentos flectores nos pontos nodais do elemento n 2,. sabendo que os
esforos nos pontos de Gauss deste elementos so os apresentados no Quadro
seguinte. Comente os resultados obtidos.
Element number (ielem)
Gauss point number for axial stresses (igstm)
Gauss point number for bending stresses (igstb)
Gauss point number for shear stresses (igsts)
Gauss point global coordinates (gpcot_m)
Gauss point global coordinates (gpcot_b)
Gauss point global coordinates (gpcot_s)
X axial force (Nx)
XY shear force (Nxy)
Y bending moment (My)
ielem igstm Nx gpcot_m
igsts Nxy gpcot_s
igstb My gpcot_b
2 1 0.00000000 6.05662433 0.00000000
2 2 0.00000000 8.94337567 0.00000000
2 1 -328.74848110 6.05662433 0.00000000
2 2 -159.58485223 8.94337567 0.00000000
2 1 840.75756015 6.05662433 0.00000000
2 2 135.90910652 8.94337567 0.00000000
NOTA: No clculo da matriz de rigidez, do vector das foras nodais equivalentes e dos esforos utilize a
integrao reduzida.
Dados:
Peso especfico do material constituinte da estrutura=25 kN/m3;
Largura da estrutura = 0.4 m;
Mdulo de elasticidade longitudinal do material constituinte da estrutura = 30 GPa;
Coeficiente de Poisson=0.0.
x2 50.0 kN/m
h = 0.008 x12 0.16 x1 + 1.2 100 kN
1 2 3
1.2m h 4 5 0.40m
x1
2
1
10.0m
Figura 1
Joaquim Barros 4.62
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
1 - O elemento de quatro ns representado na Figura 1 1 2 3 4
pertence a um prtico plano. Utilizando a teoria de
Timoshenko e a formulao isoparamtrica dos = = =
elementos finitos: -1 s1 +1
a) determine a matriz de deformao, B , deste x1
7.0 7.5 8.0 8.5 (m)
elemento, em coordenadas normalizadas, s1 .
b) calcule os valores da matriz de deformao relativa Figura 1 - Elemento finito de quatro
ao corte, B c , em s1 = 0 . ns.
2 - Na folha em anexo apresenta-se um ficheiro de dados do programa de clculo automtico
femixnd.
a) Desenhe a estrutura e as condies de ligao da estrutura ao exterior.
b) Represente as aces que actuam na estrutura.
c) Calcule o coeficiente de rigidez K8(,E8 ) da matriz de rigidez da estrutura.
d) Admitindo que os deslocamentos dos ns da estrutura em anlise, no referencial global, so
os seguintes (obtidos por intermdio do femixnd):
*** Nodal displacements:
(global coordinate system)
Point number (ipoin)
X displacement (delta-x)
Y displacement (delta-y)
Theta-Y rotation (delta-ty)
ipoin delta-x delta-y delta-ty
1 0.00000000 0.00000000 0.00064587
2 0.00112211 0.00115465 0.00017538
3 -0.00038725 -0.00119933 -0.00290275
4 -0.00019362 -0.01095866 -0.00395138
5 0.00000000 -0.01698954 0.00000000
determine os momentos flectores nos pontos de Gauss do elemento n 2.
3 - Na Figura 2 representa-se um edifcio habitacional de trs andares situado em Guimares e
num terreno tipo II.
Utilizando o mtodo de Rayleigh, determine as foras mximas ao nvel de cada andar
devidas s aces ssmicas regulamentares segundo a direco x1 (no clculo dos
deslocamentos considere as vigas de rigidez infinita).
3.0 (0.4x0.4) (0.4x0.4) (0.4x0.4)
6.0 (0.45x0.45) (0.45x0.45)
3.0 (0.45x0.45)
(0.5x0.5) (0.5x0.5) (0.5x0.5)
4.0
6.0
6.0 6.0
(m)
x1
6.0 6.0
Joaquim Barros 4.63
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
Dados:
- mdulo de elasticidade longitudinal do beto = 30 GPa; coeficiente de
amortecimento=5%
- vigas de seco 0.3x0.7 m2;
- peso prprio das lajes, com 0.3 m de espessura = 3 kN/m2;
- peso de revestimentos e paredes de alvenaria = 2.5 kN/m2;
### Main title of the problem
### Elementos de tres nos
### (kN,m)
Teste Comp. Est. - Fevereiro 1998 ;
### Main parameters
2 ; # nelem (n. of elements in the mesh)
5 ; # npoin (n. of points in the mesh)
2 ; # nvfix (n. of points with fixed degrees of freedom)
1 ; # ncase (n. of load cases)
1 ; # nmats (n. of sets of material properties) (only in linear regime)
1 ; # nspen (n. of sets of element nodal properties) (only in linear regime)
10 ; # ntype (problem type)
1 ; # ntyan (type of analysis)
3 ; # nnode (n. of nodes per element)
2 ; # ngaum (n. of Gauss points for axial rigidity)
2 ; # ngaub (n. of Gauss points for bending rigidity)
2 ; # ngaus (n. of Gauss points for shear rigidity)
2 ; # ngstm (n. of Gauss points for axial forces)
2 ; # ngstb (n. of Gauss points for bending moments)
2 ; # ngsts (n. of Gauss points for shear forces)
2 ; # ndime (n. of geometric dimensions)
3 ; # ndofn (n. of degrees of freedom per node)
4 ; # nprop (n. of material properties used in the formulation)
2 ; # npren (n. of element nodal properties used in the formulation)
0 ; # npscs (n. of points with specified coordinate system)
0 ; # nsscs (n. of sets of specified coordinate system)
0 ; # npspr (n. of springs)
0 ; # nsspv (n. of sets of spring vectors)
### Material properties index, element nodal properties index and
### list of the nodes of each element
# ielem matno ielnp lnods ...
1 1 1 1 2 3 ;
2 1 1 3 4 5 ;
### Coordinates of the points
# ipoin coord-g1 coord-g2
1 0.00000000 3.00000000 ;
2 2.00000000 1.50000000 ;
3 4.00000000 0.00000000 ;
4 6.50000000 0.00000000 ;
5 9.00000000 0.00000000 ;
### Points with fixed degrees of freedom and fixity codes (1-fixed;0-free)
# ivfix nofix ifpre
1 1 1 1 0 ;
2 5 1 0 1 ;
### Points wiyh specified coordinate system (index, point number and type
### of coordinate system)
# ipscs npspe itycs
### Specified coordinate system
# isscs
### Transformation matrix from specified to global coordinate system (coscs)
### (Each row of coscs includes the components of a specified
### coordinate system vector in the global coordinate system)
# ivect coscs...
# isscs
### Transformation matrix from specified to global coordinate system (coscs)
### (Each row of coscs includes the components of a specified
### coordinate system vector in the global coordinate system)
# ivect coscs...
### Spring index, point number, type of spring vector, rigidity value,
### and flag to choice between displacement rigidity (d) or
### rotational rigidity (r) (only when npspr > 0)
# ipspr nsprp ityvs sprva drrif
### Index set of spring vector. Components in the global coordinate system
### of the sets of spring vectors (only when nsspv > 0)
# isspv
Joaquim Barros 4.64
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
# cgspv...
### Sets of material properties
### (Young modulus, Poisson ratio, mass per unit volume and thermic coeff.)
# imats young poiss dense alpha
1 30e+06 0.00 1.0 1e-5 ;
### Sets of element nodal properties
### (Cross section area, tortional and flexural inertia and
### local coordinate system definition angle in degrees)
# ispen
1 ;
# inode barea bin2l
1 0.15 0.003125 ;
2 0.15 0.003125 ;
3 0.15 0.003125 ;
# ===================================================================
### Title of the first load case
Accoes ;
### Load parameters
0 ; # nplod (n. of point loads in nodal points)
0 ; # ngrav (gravity load flag: 1-yes;0-no)
2 ; # nedge (n. of edge loads)
0 ; # ntemp (n. of elements with temperature variation)
0 ; # nepoi (n. of element point loads)
0 ; # nprva (n. of prescribed and non zero degrees of freedom)
### Point loads in nodal points (loaded point and load value)
### (global coordinate system)
# iplod lopop pload-g1 pload-g2 pload-g3
### Gravity load (gravity acceleration)
### (global coordinate system)
# gravi-g1 gravi-g2
### Edge load (loaded element, loaded points and load value)
### (local coordinate system)
# iedge loele
1 1 ;
# lopoe q_l1 q_l2 q_l3
1 0.0 0.0 0.0 ;
2 0.0 -15.0 0.0 ;
3 0.0 -30.0 0.0 ;
# iedge loele
2 2 ;
# lopoe q_l1 q_l2 q_l3
3 0.0 -30.0 0.0 ;
4 0.0 -30.0 0.0 ;
5 0.0 -30.0 0.0 ;
### Thermal load (loaded set temperature variation, n. of elements,
### loaded bar, uniform temperature, l2 variation, l3 sectional thick.)
# itemp loelt
# ilopo teuni tevab_l2 secth_l3
### Element point load (loaded element, distance to the left
### end and load value) (global coordinate system)
# il1le loelp l1lep epoil_g1 epoil_g2 epoil_g3
### Prescribed variables (point, degree of freedom and prescribed value)
### (global coordinate system)
# iprva nnodp ndofp prval
END_OF_FILE ;
2 - Na folha em anexo apresenta-se um ficheiro de dados do programa de clculo automtico
femixnd.
a) Desenhe a estrutura, as condies de ligao da estrutura ao exterior e as caractersticas
geomtricas das seces das barras.
b) Represente as aces que actuam na estrutura.
c) Calcule a submatriz de rigidez associada aos graus de liberdade do n 3.
d) Determine os esforos de corte no(s) ponto(s) de Gauss do elemento n 3, admitindo que os
deslocamentos dos ns da estrutura em anlise, no referencial global, so os seguintes
(obtidos por intermdio do femixnd):
Joaquim Barros 4.65
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
Point number (ipoin)
X displacement (delta-x)
Y displacement (delta-y)
Theta-Y rotation (delta-ty)
ipoin delta-x delta-y delta-ty
1 0.00000000 0.00000000 0.00000000
2 0.00236404 -0.00012215 -0.00306316
3 0.00515614 -0.00024431 -0.00057076
4 0.00515614 -0.00111798 -0.00006192
5 0.00515614 0.00000000 0.00091145
6 0.00542503 0.00007585 0.00017789
7 0.00536218 0.00000000 -0.00008697
e) Obtenha os momentos flectores nos pontos nodais dos elementos n 3 e 4, admitindo que os
esforos no(s) ponto(s) de Gauss dos elementos so os seguintes (obtidos por intermdio do
femixnd):
Element number (ielem)
Gauss point number for axial force (igstm)
Gauss point number for shear force (igsts)
Gauss point number for bending moment (igstb)
Gauss point global coordinates (gpcot_m)
Gauss point global coordinates (gpcot_b)
Gauss point global coordinates (gpcot_s)
X axial force (Nx)
XY shear force (Nxy)
Y bending moment (My)
ielem igstm Nx gpcot_m
igsts Nxy gpcot_s
igstb My gpcot_b
1 1 -219.87798778 4.00000000 0.75000000
1 1 -50.00000000 4.00000000 0.75000000
1 1 41.35264524 4.00000000 0.75000000
2 1 -219.87798778 4.00000000 2.25000000
2 1 -50.00000000 4.00000000 2.25000000
2 1 -33.64735476 4.00000000 2.25000000
3 1 0.00000000 5.25000000 3.00000000
3 1 -74.54051071 5.25000000 3.00000000
3 1 -32.97308485 5.25000000 3.00000000
4 1 0.00000000 7.75000000 3.00000000
4 1 50.45948929 7.75000000 3.00000000
4 1 -63.07436162 7.75000000 3.00000000
5 1 -49.70248624 3.00000000 3.75000000
5 1 66.26998166 3.00000000 3.75000000
5 1 -48.51243122 3.00000000 3.75000000
6 1 10.29751376 1.00000000 5.25000000
6 1 -13.73001834 1.00000000 5.25000000
6 1 17.16252293 1.00000000 5.25000000
Comente os resultados obtidos.
ANEXO
### Main title of the problem
### (kN,m)
Exame de Complementos de Estruturas - Fevereiro 1998 ;
### Main parameters
6 ; # nelem (n. of elements in the mesh)
7 ; # npoin (n. of points in the mesh)
3 ; # nvfix (n. of points with fixed degrees of freedom)
1 ; # ncase (n. of load cases)
1 ; # nmats (n. of sets of material properties) (only in linear regime)
2 ; # nspen (n. of sets of element nodal properties) (only in linear regime)
10 ; # ntype (problem type)
1 ; # ntyan (type of analysis)
Joaquim Barros 4.66
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
2 ; # nnode (n. of nodes per element)
1 ; # ngaum (n. of Gauss points for axial rigidity)
1 ; # ngaub (n. of Gauss points for bending rigidity)
1 ; # ngaus (n. of Gauss points for shear rigidity)
1 ; # ngstm (n. of Gauss points for axial forces)
1 ; # ngstb (n. of Gauss points for bending moments)
1 ; # ngsts (n. of Gauss points for shear forces)
2 ; # ndime (n. of geometric dimensions)
3 ; # ndofn (n. of degrees of freedom per node)
4 ; # nprop (n. of material properties used in the formulation)
2 ; # npren (n. of element nodal properties used in the formulation)
0 ; # npscs (n. of points with specified coordinate system)
0 ; # nsscs (n. of sets of specified coordinate system)
0 ; # npspr (n. of springs)
0 ; # nsspv (n. of sets of spring vectors)
### Material properties index, element nodal properties index and
### list of the nodes of each element
# ielem matno ielnp lnods ...
11 1 1 2 ;
21 1 2 3 ;
31 2 3 4 ;
41 2 4 5 ;
51 2 3 6 ;
61 2 6 7 ;
### Coordinates of the points
# ipoin coord-g1 coord-g2
1 4.00000000 0.00000000 ;
2 4.00000000 1.50000000 ;
3 4.00000000 3.00000000 ;
4 6.50000000 3.00000000 ;
5 9.00000000 3.00000000 ;
6 2.00000000 4.50000000 ;
7 0.00000000 6.00000000 ;
### Points with fixed degrees of freedom and fixity codes (1-fixed;0-free)
# ivfix nofix ifpre
1 1 1 1 1 ;
2 5 0 1 0 ;
3 7 0 1 0 ;
### Sets of material properties
### (Young modulus, Poisson ratio, mass per unit volume and thermic coeff.)
# imats young poiss dense alpha
1 30e+06 0.00 1.0 1e-5 ;
### Sets of element nodal properties
### (Cross section area, tortional and flexural inertia and
### local coordinate system definition angle in degrees)
# ispen
1 ;
# inode barea bin2l
1 0.09 0.000675 ;
2 0.09 0.000675 ;
# ispen
2 ;
# inode barea bin2l
1 0.18 0.0054 ;
2 0.18 0.0054 ;
# ===================================================================
### Title of the first load case
Accoes ;
### Load parameters
2 ; # nplod (n. of point loads in nodal points)
0 ; # ngrav (gravity load flag: 1-yes;0-no)
2 ; # nedge (n. of edge loads)
0 ; # ntemp (n. of elements with temperature variation)
0 ; # nepoi (n. of element point loads)
0 ; # nprva (n. of prescribed and non zero degrees of freedom)
### Point loads in nodal points (loaded point and load value)
### (global coordinate system)
# iplod lopop pload-g1 pload-g2 pload-g3
1 3 50.0 0.0 0.0 ;
2 6 0.0 -100.0 0.0 ;
### Edge load (loaded element, loaded points and load value)
### (local coordinate system)
# iedge loele
1 3 ;
# lopoe q_l1 q_l2 q_l3
3 0.0 -50.0 0.0 ;
4 0.0 -50.0 0.0 ;
# iedge loele
2 4 ;
# lopoe q_l1 q_l2 q_l3
Joaquim Barros 4.67
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
4 0.0 -50.0 0.0 ;
5 0.0 -50.0 0.0 ;
END_OF_FILE ;
4 A viga representada na Figura 1 est discretizada por um elemento de 3 ns de
Timoshenko. Deduza o vector das foras nodais equivalentes aco actuante.
50 kN/m
5.00 m
Figura 1
1 No Quadro 1 apresenta-se um ficheiro de dados do programa de clculo automtico
femixnd.
a) Calcule a submatriz de rigidez associada aos graus de liberdade do n 6.
b) Determine os esforos de flexo no(s) ponto(s) de Gauss do elemento n 1, admitindo que
os deslocamentos dos ns deste elemento, no referencial global, so os seguintes (obtidos por
intermdio do femixnd):
Point number (ipoin)
X displacement (delta-x)
Y displacement (delta-y)
Theta-Y rotation (delta-ty)
ipoin delta-x delta-y delta-ty
1 0.00000000 0.00000000 -0.00000000
2 -0.00004607 -0.00010529 0.00005157
6 -0.00003950 -0.00017111 -0.00005264
2 - Na Figura 1 representa-se um edifcio habitacional de x2 Px12 Px22
trs andares situado em Lisboa e num terreno do tipo II.
a) Calcule as foras de massa que actuam ao nvel de Px31
cada piso.
b) Distribua essas foras pelos prticos que discretizam a 5.0
estrutura.
c) Utilizando o mtodo de Rayleigh, determine as foras
mximas ao nvel de cada andar, no prtico Px12 , devidas Px21
s aces ssmicas regulamentares (no clculo dos
deslocamentos considere as vigas de rigidez infinita). 5.0
(m)
Dados:
- mdulo de elasticidade longitudinal do beto = 35 GPa; Px11
x1
- coeficiente de amortecimento=5% 5.0
- vigas de seco 0.3x0.6 m2;
- peso prprio das lajes, com 0.25 m de espessura = 3.0 Figura 1a
kN/m2;
- peso de revestimentos e paredes de alvenaria = 2.0
kN/m2;
Joaquim Barros 4.68
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
Px12 , Px22 Px11 , Px21 , Px31
(0.35x0.35) (0.35x0.35)
3.0 (0.35x0.35) (0.35x0.35) 3.0 (0.35x0.35)
3.0 (0.40x0.40) (0.40x0.40) (0.40x0.40) 3.0 (0.40x0.40) (0.40x0.40)
4.0 (0.45x0.45) (0.45x0.45) (0.45x0.45) 4.0 (0.45x0.45) (0.45x0.45)
5.0 5.0 (m) 5.0
Figura 1b
Quadro 1 Ficheiro de dados do programa femixnd (continua)
### Main title of the problem (kN,m)
Exame de Complementos de Estruturas - Setembro de 1998 ;
### Main parameters
5 ; # nelem (n. of elements in the mesh)
10 ; # npoin (n. of points in the mesh)
3 ; # nvfix (n. of points with fixed degrees of freedom)
1 ; # ncase (n. of load cases)
1 ; # nmats (n. of sets of material properties) (only in linear regime)
2 ; # nspen (n. of sets of element nodal properties) (only in linear regime)
10 ; # ntype (problem type)
1 ; # ntyan (type of analysis)
3 ; # nnode (n. of nodes per element)
2 ; # ngaum (n. of Gauss points for axial rigidity)
2 ; # ngaub (n. of Gauss points for bending rigidity)
2 ; # ngaus (n. of Gauss points for shear rigidity)
2 ; # ngstm (n. of Gauss points for axial forces)
2 ; # ngstb (n. of Gauss points for bending moments)
2 ; # ngsts (n. of Gauss points for shear forces)
2 ; # ndime (n. of geometric dimensions)
3 ; # ndofn (n. of degrees of freedom per node)
4 ; # nprop (n. of material properties used in the formulation)
2 ; # npren (n. of element nodal properties used in the formulation)
0 ; # npscs (n. of points with specified coordinate system)
0 ; # nsscs (n. of sets of specified coordinate system)
0 ; # npspr (n. of springs)
0 ; # nsspv (n. of sets of spring vectors)
### Material properties index, element nodal properties index and
### list of the nodes of each element
# ielem matno ielnp lnods ...
1 1 1 1 2 6 ;
2 1 1 1 3 8 ;
3 1 2 4 5 6 ;
4 1 2 6 7 8 ;
5 1 2 8 9 10 ;
### Coordinates of the points
# ipoin coord-g1 coord-g2
1 7.0 0.0 ;
2 5.5 2.0 ;
3 8.5 2.0 ;
4 0.0 4.0 ;
5 2.0 4.0 ;
6 4.0 4.0 ;
7 7.0 4.0 ;
8 10.0 4.0 ;
9 12.0 4.0 ;
10 14.0 4.0 ;
### Points with fixed degrees of freedom and fixity codes (1-fixed;0-free)
# ivfix nofix ifpre
1 1 1 1 0 ;
2 4 0 1 0 ;
3 10 0 1 0 ;
### Sets of material properties
### (Young modulus, Poisson ratio, mass per unit volume and thermic coeff.)
# imats young poiss dense alpha
1 30e+06 0.00 1.0 1e-5 ;
### Sets of element nodal properties
### (Cross section area, tortional and flexural inertia and
### local coordinate system definition angle in degrees)
# ispen
1 ;
# inode barea bin2l
1 0.5 0.01042 ;
2 0.5 0.01042 ;
3 0.5 0.01042 ;
# ispen
Joaquim Barros 4.69
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
2 ;
# inode barea bin2l
1 0.5 0.04167 ;
2 0.5 0.04167 ;
3 0.5 0.04167 ;
# ===================================================================
### Title of the first load case
Accoes ;
### Load parameters
0 ; # nplod (n. of point loads in nodal points)
0 ; # ngrav (gravity load flag: 1-yes;0-no)
3 ; # nedge (n. of edge loads)
0 ; # ntemp (n. of elements with temperature variation)
0 ; # nepoi (n. of element point loads)
0 ; # nprva (n. of prescribed and non zero degrees of freedom)
### Edge load (loaded element, loaded points and load value)
### (local coordinate system)
# iedge loele
1 3 ;
# lopoe q_l1 q_l2 q_l3
4 0.0 -50.0 0.0 ;
5 0.0 -50.0 0.0 ;
6 0.0 -50.0 0.0 ;
# iedge loele
2 4 ;
# lopoe q_l1 q_l2 q_l3
6 0.0 -50.0 0.0 ;
7 0.0 -50.0 0.0 ;
8 0.0 -50.0 0.0 ;
# iedge loele
3 5 ;
# lopoe q_l1 q_l2 q_l3
8 0.0 -50.0 0.0 ;
9 0.0 -50.0 0.0 ;
10 0.0 -50.0 0.0 ;
END_OF_FILE ;
1 Na Figura 1 representa-se um A2
elemento de viga de Timoshenko
de 3 ns. Determine as foras 0.5 m
F=100 kN
nodais equivalentes fora de
100 kN aplicada ortogonalmente
1 3
ao eixo da viga, a 0.5 m da sua 2 s1 (A 3 )
1.5 m 1.5 m A1
extremidade esquerda.
Figura 1
2 A estrutura representada na Figura 2 est descretizada em 4 elementos de 3 ns de Timoshenko.
e) Desprezando a deformabilidade axial das barras e utilizando a integrao reduzida, calcule os
coeficientes de rigidez relativos ao n B.
f) Calcule as foras nodais equivalentes no n B.
g) Considerando dois pontos de Gauss por elemento, calcule os esforos de flexo e de corte no
elemento n 1, sabendo que os deslocamentos dos ns deste elemento, no referencial global, so os
seguintes :
N deslocamento segundo x1 deslocamento segundo x2 rotao segundo x3
1 0.00000000 0.00000000 -0.00084618
2 -0.00000000 -0.00091344 -0.00056319
3 -0.00000000 -0.00127759 0.00003270
h) Com base nos esforos do elemento n 1 , determine o momento no n A. Se os resultados no lhe
parecem aceitveis, explique como procederia para melhorar os resultados obtidos.
Dados: b=0.3 m, h=0.7 m; E=30 GPa, = 0.0
Mola: k m = 500 000 kN / m
Joaquim Barros 4.70
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
100 kN
x2
A 1 2 3 4 B 5 50 kN/m
6
1 2
3.00 m
7
km = 500 000kN/m 3
8
C x1
4 9
x3
5.00 m 4.00 m
Figura 2
1 No Quadro 1 apresenta-se um ficheiro de dados do programa de clculo automtico
femixnd.
a) Desenhe a estrutura, as condies de ligao da estrutura ao exterior e as caractersticas
geomtricas das seces das barras.
b) Represente as aces que actuam na estrutura.
c) Calcule a submatriz de rigidez associada aos graus de liberdade do n 5.
d) Calcule as foras nodais equivalentes correspondentes aos graus de liberdade do n 5.
d) Determine o momento flector e o esforo de corte no ponto de Gauss n 1 do elemento n 2,
admitindo que os deslocamentos dos ns da estrutura em anlise, no referencial global, so os
seguintes (obtidos por intermdio do femixnd):
Point number (ipoin)
X displacement (delta-x)
Y displacement (delta-y)
Theta-Y rotation (delta-ty)
ipoin delta-x delta-y delta-ty
1 0.00000000 0.00000000 -0.00016467
2 0.00000000 -0.00030491 -0.00084488
3 0.00017332 -0.00028604 -0.00007005
4 -0.00037563 -0.00079193 0.00019140
5 0.00006277 -0.00019359 0.00021382
6 0.00003138 -0.00015256 -0.00003199
7 0.00000000 0.00000000 0.00033052
Joaquim Barros 4.71
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
Quadro 1 Ficheiro de dados
### Main title of the problem
## Linear analysis
Complementos de Estruturas: 1a. chamada de Novembro de 1999 ;
### Main parameters
3 ; # nelem (n. of elements in the mesh)
7 ; # npoin (n. of points in the mesh)
3 ; # nvfix (n. of points with fixed degrees of freedom)
1 ; # ncase (n. of load cases)
2 ; # nmats (n. of sets of material properties) (only in linear regime)
2 ; # nspen (n. of sets of element nodal properties) (only in linear regime)
10 ; # ntype (problem type: 10-2D Timoshenko beam; 11-3D Timoshenko beam)
1 ; # ntyan (type of analysis:1-lin.;2-mat. nlin.;3-dyn. lin.;4-dyn. mat. nlin.)
3 ; # nnode (n. of nodes per element)
2 ; # ngaum (n. of Gauss points for the axial stiffness matrix)
2 ; # ngaub (n. of Gauss points for the bending stiffness matrix)
2 ; # ngaus (n. of Gauss points for shear stiffness matrix)
2 ; # ngstm (n. of Gauss points for the axial forces)
2 ; # ngstb (n. of Gauss points for the bending moments)
2 ; # ngsts (n. of Gauss points for the shear forces)
2 ; # ndime (n. of geometric dimensions)
3 ; # ndofn (n. of degrees of freedom per node)
4 ; # nprop (n. of material properties used in the formulation)
2 ; # npren (n. of element nodal properties used in the formulation)
0 ; # npscs (n. of points with specified coordinate system)
0 ; # nsscs (n. of sets of specified coordinate system)
0 ; # npspr (n. of springs)
0 ; # nsspv (n. of sets of spring vectors)
### Material properties index, element nodal properties index and
### list of the nodes of each element
# ielem matno ielnp lnods ...
1 2 2 1 3 5 ;
2 1 1 2 4 5 ;
3 1 1 5 6 7 ;
### Coordinates of the points
# ipoin coord-g1 coord-g2
1 0.0 0.0 ;
2 0.0 6.0 ;
3 2.0 1.5 ;
4 2.0 4.5 ;
5 4.0 3.0 ;
6 5.5 3.0 ;
7 7.0 3.0 ;
### Points with fixed degrees of freedom and fixity codes (1-fixed;0-free)
# ivfix nofix ifpre
1 1 1 1 0 ;
2 2 1 0 0 ;
3 7 1 1 0 ;
### Sets of material properties
### (Young modulus, Poisson ratio, mass per unit volume and thermic coeff.)
# imats young poiss dense alpha
1 30e+06 0.0 0.0 0.0 ;
2 200e+06 0.0 0.0 0.0 ;
### Sets of element nodal properties
### (Cross section area, tortional and flexural inertias,
### local coordinate system definition angle in degrees and
### position of the shear center at the section)
# ispen
1 ;
# inode barea bin2l
1 0.3 2.25e-03 ;
2 0.3 2.25e-03 ;
3 0.3 2.25e-03 ;
# ispen
2 ;
# inode barea bin2l
1 0.1 1e-09 ;
2 0.1 1e-09 ;
3 0.1 1e-09 ;
Joaquim Barros 4.72
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
# ===================================================================
### Title of the first load case
Load case title (1) ;
### Load parameters
0 ; # nplod (n. of point loads in nodal points)
0 ; # ngrav (gravity load flag: 1-yes;0-no)
2 ; # nedge (n. of edge loads)
0 ; # ntemp (n. of elements with temperature variation)
0 ; # nepoi (n. of element point loads)
0 ; # nprva (n. of prescribed and non zero degrees of freedom)
### Edge load (loaded element, loaded points and load value)
### (local coordinate system)
# iedge loele
1 2 ;
# lopoe f_l1 f_l2 m_l3
2 0.0 0.0 0.0 ;
4 0.0 -20.0 0.0 ;
5 0.0 -40.0 0.0 ;
# iedge loele
2 3 ;
# lopoe f_l1 f_l2 m_l3
5 0.0 -40.0 0.0 ;
6 0.0 -40.0 0.0 ;
7 0.0 -40.0 0.0 ;
END_OF_FILE ;
2 A seco da viga DE da estrutura representada na Figura 2 varia parabolicamente ao longo
do seu desenvolvimento longitudinal. Para analisar esta estrutura, as barras biarticuladas
foram discretizadas por um elemento finito de 3 ns e a viga DE foi discretizada por 10
elementos de 3 ns de Timoshenko de igual comprimento (2 metros cada).
a) Adoptando a integrao selectiva no clculo da matriz de rigidez dos elementos finitos da viga DE,
calcule os coeficientes da matriz de rigidez global da estrutura, correspondentes aos graus de
liberdade do n D.
b) Considerando a ordem de integrao que julgue adequada (justifique), calcule as foras no
n D, equivalentes aco do peso prprio da viga.
c) Sabendo que os deslocamentos, no referencial global, dos ns do 1 elemento da viga (ver
Figura 2) so os seguintes (unidade de deslocamento em metros e de rotao em radianos):
*** Nodal displacements:
(global coordinate system)
Point number (ipoin)
X displacement (delta-x)
Y displacement (delta-y)
Theta-Y rotation (delta-ty)
ipoin delta-x delta-y delta-ty
7 (1 n do elemento 1) 0.00036459 -0.00036458 -0.00234074
8 (2 n do elemento 1) 0.00036459 -0.00268326 -0.00221977
9 (3 n do elemento 1) 0.00036459 -0.00482145 -0.00199181
calcule os esforos de corte e de flexo, no ponto de Gauss mais prximo da seco D da
viga. Comente os resultados obtidos.
d) Se a viga DE estivesse submetida a uma de variao diferencial de temperatura td,
descreva os procedimentos necessrios para calcular as foras nodais equivalente a esta aco,
num elemento finito de Timoshenko de 3 ns.
Dados:
Barras biarticuladas: As = 100.0 cm2; Es = 200.0 GPa
Viga DE: largura = 0.5 m; Ec = 30.0 GPa, c=0.0; = 1.010-5/oC; c = 25.0 kN/m3
Joaquim Barros 4.73
Mtodo dos elementos finitos aplicado a estruturas reticuladas Captulo 4
0.7 2 14
1,4m
x
h= x + x + 0.7
0,7m 100 100
h
D E
1
10m
5m
A B C
5m 20m
Figura 2
1 - a) Admita que a viga simplesmente apoiada, representada na Figura 1 discretizada por
um nico elemento finito de quatro ns de Timosenko.
a) Deduza a matriz de rigidez exacta deste elemento, apenas considerando a deformao
por flexo e corte;
b) Quantos pontos de integrao de Gauss-Legendre sero necessrios para calcular
exactamente as foras nodais equivalentes aco actuante no elemento. Justifique.
c) Admitindo para p o valor de 100 kN/m, determine as foras nodais equivalentes
aco actuante;
d) Calcule os deslocamentos dos ns do elemento;
e) Utilizando trs pontos de Gauss por elemento, determine os esforos de flexo e de
corte nesses pontos de Gauss;
f) Extrapole os esforos obtidos na alnea anterior para os ns do elemento finito.
Comente os resultados obtidos.
Dados:
Seco rectangular com largura de 0.5 m e altura de 0.7 m.
Ec = 30.0 GPa, c=0.0.
p kN/m
1 4
2 3
= = =
3.00 m
Figura 1
Joaquim Barros 4.74
S-ar putea să vă placă și
- Apostila Informática Básica - Completa PDFDocument166 paginiApostila Informática Básica - Completa PDFpaulojsfilho83% (6)
- Telecurso 2000 - Elementos de Maquinas - Volume 1 e 2Document414 paginiTelecurso 2000 - Elementos de Maquinas - Volume 1 e 2rodrigofgui80% (5)
- Técnicas de Trabalho Sobre Tensão A NR-10 2017Document30 paginiTécnicas de Trabalho Sobre Tensão A NR-10 2017Erick100% (2)
- Manual de Acidente de Trabalho INSS 2016 PDFDocument49 paginiManual de Acidente de Trabalho INSS 2016 PDFBF DalmagroÎncă nu există evaluări
- Check List NR-12Document3 paginiCheck List NR-12Henrique AraujoÎncă nu există evaluări
- 7130 28323 1 PBDocument16 pagini7130 28323 1 PBRafael Anderson NascimentoÎncă nu există evaluări
- NR12 - Acidentes Com Máquinas e As Novas Perspectivas Da NR 12-1Document17 paginiNR12 - Acidentes Com Máquinas e As Novas Perspectivas Da NR 12-1Andre FragosoÎncă nu există evaluări
- Apresentação NR-12Document59 paginiApresentação NR-12Wellington AndradeÎncă nu există evaluări
- 01 - Introdução À Segurança Com Eletricidade-1 PDFDocument20 pagini01 - Introdução À Segurança Com Eletricidade-1 PDFErickÎncă nu există evaluări
- Manual Técnico - Petrobras PDFDocument144 paginiManual Técnico - Petrobras PDFCristiano Sousa Sampaio0% (1)
- 02 - Introdução Ao Sistema Elétrico de Potência PDFDocument25 pagini02 - Introdução Ao Sistema Elétrico de Potência PDFErickÎncă nu există evaluări
- Analise de Risco NR 12Document5 paginiAnalise de Risco NR 12ErickÎncă nu există evaluări
- Tabela Propriedades MateriaisDocument5 paginiTabela Propriedades MateriaisErickÎncă nu există evaluări
- Dicionário TécnicoDocument85 paginiDicionário Técnicoapi-3704990100% (5)
- Apostila MASTERCAM PDFDocument44 paginiApostila MASTERCAM PDFErick100% (1)
- Rodizio Schioppa L12Document1 paginăRodizio Schioppa L12ErickÎncă nu există evaluări
- Optimização de Uma Máquina de PultrusãoDocument145 paginiOptimização de Uma Máquina de PultrusãoErick100% (1)
- Apresentação NR-12Document59 paginiApresentação NR-12Wellington AndradeÎncă nu există evaluări
- 09 Apresentacao TCC MecanicaDocument30 pagini09 Apresentacao TCC MecanicaErickÎncă nu există evaluări
- Catia V5Document414 paginiCatia V5Ramon Rocha75% (4)
- Máquinas Térmicas Aula 4Document51 paginiMáquinas Térmicas Aula 4CLAUDIO VIDAL TEIXEIRAÎncă nu există evaluări
- 06 071Document71 pagini06 071ErickÎncă nu există evaluări
- 06 071 PDFDocument1 pagină06 071 PDFErickÎncă nu există evaluări
- Máquinas Térmicas Aula 4Document51 paginiMáquinas Térmicas Aula 4CLAUDIO VIDAL TEIXEIRAÎncă nu există evaluări
- Monografia Rasi 2008Document70 paginiMonografia Rasi 2008Talita SilvaÎncă nu există evaluări
- Questao - 1 - Term.Document1 paginăQuestao - 1 - Term.ErickÎncă nu există evaluări
- Roscas ABNTDocument5 paginiRoscas ABNTCaio LopesÎncă nu există evaluări
- Modelo de Curriculum 1 PreenchidoDocument1 paginăModelo de Curriculum 1 PreenchidoErickÎncă nu există evaluări
- Cálculo de Matriz para Elementos FinitosDocument11 paginiCálculo de Matriz para Elementos FinitosAna Paula Pereira PereiraÎncă nu există evaluări
- Máquinas Térmicas Aula 4Document51 paginiMáquinas Térmicas Aula 4CLAUDIO VIDAL TEIXEIRAÎncă nu există evaluări
- Artigo Tracos Concreto-Paulo BastosDocument8 paginiArtigo Tracos Concreto-Paulo BastosFernanda LapendaÎncă nu există evaluări
- Memória de Cálculo-4Document26 paginiMemória de Cálculo-4Tina StewartÎncă nu există evaluări
- DUCTILIDADDocument10 paginiDUCTILIDADErick Alexander Díaz ArruéÎncă nu există evaluări
- LISTA DE EXERCÍCIOS Resolvida de Estruturas de Concreto ArmadoDocument22 paginiLISTA DE EXERCÍCIOS Resolvida de Estruturas de Concreto Armadogabriel_stach95% (39)
- ARQ-EXE-PRÉDIO01 TIPOA 3de4Document1 paginăARQ-EXE-PRÉDIO01 TIPOA 3de4Teslah MartineÎncă nu există evaluări
- Exercicio de Resistencia Dos Materiais I (Diagrama Cortante-Fletor)Document3 paginiExercicio de Resistencia Dos Materiais I (Diagrama Cortante-Fletor)isaacpintoÎncă nu există evaluări
- Ancoragem e Emenda de ArmadurasDocument81 paginiAncoragem e Emenda de ArmadurasLucas BelitardoÎncă nu există evaluări
- F-20 - Quadro Resumo de Controle de Materiais de AcabamentoDocument2 paginiF-20 - Quadro Resumo de Controle de Materiais de AcabamentorenatasfrÎncă nu există evaluări
- Projeto Estrutural - Contéudo Detalhado Do CursoDocument21 paginiProjeto Estrutural - Contéudo Detalhado Do CursoAriel PraiaÎncă nu există evaluări
- Memorial Descritivo - Depósito de Resíduos de ÓleoDocument2 paginiMemorial Descritivo - Depósito de Resíduos de ÓleoRoseno100% (1)
- Resolução - Exercício - Viga de ConcretoDocument11 paginiResolução - Exercício - Viga de ConcretoFelipe LimaÎncă nu există evaluări
- NBR 8545 - Execução de Alvenaria Sem Função Estrutural de Tijolos e Blocos CerâmicosDocument13 paginiNBR 8545 - Execução de Alvenaria Sem Função Estrutural de Tijolos e Blocos CerâmicosKassia LivioÎncă nu există evaluări
- Aula Formas e ArmadurasDocument30 paginiAula Formas e ArmadurasFernanda GouveiaÎncă nu există evaluări
- Componentes para Transmissão 2017 Julho Cmyk Final PDFDocument44 paginiComponentes para Transmissão 2017 Julho Cmyk Final PDFAdilvanioÎncă nu există evaluări
- O Edificio Ate Sua Cobertura - Helio Alves de AzeredoDocument99 paginiO Edificio Ate Sua Cobertura - Helio Alves de AzeredoRegiane Melo100% (1)
- Certificado Da Qualidade - CP IV-32. CERTO 2020Document1 paginăCertificado Da Qualidade - CP IV-32. CERTO 2020joão wagnerÎncă nu există evaluări
- Aula 04-Sitema Estrutural Pensil PDFDocument68 paginiAula 04-Sitema Estrutural Pensil PDFLUIZ CLAUDIO BORBA CORDEIROÎncă nu există evaluări
- Patologias em Edificações, Histórico, Causas e RecuperaçãoDocument42 paginiPatologias em Edificações, Histórico, Causas e RecuperaçãoCelio Ribeiro da Silva67% (3)
- Concreto ArmadoDocument3 paginiConcreto ArmadoSebastião SimãoÎncă nu există evaluări
- Tabela Barra Redonda Inox 304Document7 paginiTabela Barra Redonda Inox 304Luiz HenriÎncă nu există evaluări
- Catalogo Spin 2020Document21 paginiCatalogo Spin 2020Ana Carolina Avila SantosÎncă nu există evaluări
- 01 FundaçãoDocument6 pagini01 FundaçãoEduardo LeslãoÎncă nu există evaluări
- Catalogo Polimold FULLDocument192 paginiCatalogo Polimold FULLIsaac Pereira CarneiroÎncă nu există evaluări
- Catalogo de Produtos GerdauDocument66 paginiCatalogo de Produtos GerdauElisabeth PereiraÎncă nu există evaluări
- Cálculo de Quantidades de Materiais para Execução de Uma Parede de AlvenariaDocument2 paginiCálculo de Quantidades de Materiais para Execução de Uma Parede de AlvenariaCristiane FreireÎncă nu există evaluări
- MEMORIAL DESCRITIVO Figueiras FinalDocument3 paginiMEMORIAL DESCRITIVO Figueiras FinalMATIAS SIMÃOÎncă nu există evaluări
- ConcretoprotendidoDocument46 paginiConcretoprotendidoGe FilhoÎncă nu există evaluări
- Villa Savoye - Le CorbusierDocument16 paginiVilla Savoye - Le CorbusierRomina JimenezÎncă nu există evaluări
- Projeto A3 - Rev01Document25 paginiProjeto A3 - Rev01Valmiki AlvaradoÎncă nu există evaluări