S-ar putea să vă placă și
- Mitsubishi L200 2005 Manual Electrico PDFDocument126 paginiMitsubishi L200 2005 Manual Electrico PDFJhon Jaider Sanchez67% (6)
- User - Manual SRD 1676D SPANISH - Web 0507 PDFDocument150 paginiUser - Manual SRD 1676D SPANISH - Web 0507 PDFCarlos MañoÎncă nu există evaluări
- Soluciones Cap 25 ResnickDocument3 paginiSoluciones Cap 25 ResnickUlises SilvaÎncă nu există evaluări
- Añadir ActivosDocument1 paginăAñadir ActivosAlex ChancúsigÎncă nu există evaluări
- Intro Ducci Ó NF On Do AguasDocument1 paginăIntro Ducci Ó NF On Do AguasAlex ChancúsigÎncă nu există evaluări
- Dimensiones CalidadDocument2 paginiDimensiones CalidadAlex ChancúsigÎncă nu există evaluări
- Clasificacion Robot IndDocument8 paginiClasificacion Robot IndAlex ChancúsigÎncă nu există evaluări
- C. Orden de Ingenieria HorizontalDocument2 paginiC. Orden de Ingenieria HorizontalAlex ChancúsigÎncă nu există evaluări
- Impacto AmbientalDocument2 paginiImpacto AmbientalAlex ChancúsigÎncă nu există evaluări
- Ciclo de PunteadoDocument2 paginiCiclo de PunteadoAlex ChancúsigÎncă nu există evaluări
- Recomend Ac I OnesDocument1 paginăRecomend Ac I OnesAlex ChancúsigÎncă nu există evaluări
- Videos Pid Con s7 - 1200Document1 paginăVideos Pid Con s7 - 1200Alex ChancúsigÎncă nu există evaluări
- Proyecto de Vinculación: Universidad de Las Fuerzas Armadas Espe - LDocument7 paginiProyecto de Vinculación: Universidad de Las Fuerzas Armadas Espe - LAlex ChancúsigÎncă nu există evaluări
- IEEE Template 2Document10 paginiIEEE Template 2Alex ChancúsigÎncă nu există evaluări
- Formatos de ArchivosDocument8 paginiFormatos de ArchivosAlex ChancúsigÎncă nu există evaluări
- Instrumentación Mecatrónica: Informe de LaboratorioDocument20 paginiInstrumentación Mecatrónica: Informe de LaboratorioAlex ChancúsigÎncă nu există evaluări
- Marco Teórico 2 IIDocument14 paginiMarco Teórico 2 IIAlex ChancúsigÎncă nu există evaluări
- ArregDocument25 paginiArregAlex ChancúsigÎncă nu există evaluări
- 4ta SimulacionDocument12 pagini4ta SimulacionAlex ChancúsigÎncă nu există evaluări
- Universidad de Las Fuerzas Armadas - EspeDocument7 paginiUniversidad de Las Fuerzas Armadas - EspeAlex ChancúsigÎncă nu există evaluări
- Porta BrocasDocument28 paginiPorta BrocasAlex ChancúsigÎncă nu există evaluări
- SIMÓNDocument10 paginiSIMÓNAlex ChancúsigÎncă nu există evaluări
- Megacatalog2012 Pages372 700 SpanishDocument329 paginiMegacatalog2012 Pages372 700 SpanishjsmadslÎncă nu există evaluări
- Codigo G FresadoDocument118 paginiCodigo G FresadoCNC59100% (2)
- Porta BrocasDocument28 paginiPorta BrocasAlex ChancúsigÎncă nu există evaluări
- Velocidades de CorteDocument28 paginiVelocidades de CorteOrlandoLGodosÎncă nu există evaluări
- Ciclo de PunteadoDocument2 paginiCiclo de PunteadoAlex ChancúsigÎncă nu există evaluări
- Trabajo Individual FuncionesDocument1 paginăTrabajo Individual FuncionesAlex ChancúsigÎncă nu există evaluări
- SensorDocument4 paginiSensorAlex ChancúsigÎncă nu există evaluări
- AvanceDocument5 paginiAvanceAlex ChancúsigÎncă nu există evaluări
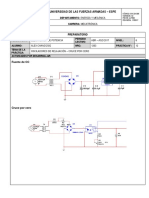
- PREPARATORIODocument13 paginiPREPARATORIOAlex ChancúsigÎncă nu există evaluări
- P3 7 AdquisiciónDocument2 paginiP3 7 AdquisiciónAlex ChancúsigÎncă nu există evaluări
- Tarea3 ElectpDocument22 paginiTarea3 ElectpKady Gisselle GomézÎncă nu există evaluări
- LWE200Document64 paginiLWE200Javier BellostaÎncă nu există evaluări
- Lab 4 Medida Del Factor de Potencia Con Cosfímetro o VatímetrosDocument6 paginiLab 4 Medida Del Factor de Potencia Con Cosfímetro o VatímetrosDiana Lizeth De La Cruz Sanchez100% (1)
- Pruebas de Vacío y Corto CircuitoDocument10 paginiPruebas de Vacío y Corto CircuitoLozano100% (1)
- F T Inversor Autonomo Isoverter 3000 EspDocument2 paginiF T Inversor Autonomo Isoverter 3000 EspJosé Antonio De Dios RodríguezÎncă nu există evaluări
- Lab1 Leonard - Subaney.EdgarDocument13 paginiLab1 Leonard - Subaney.EdgarLeonard JonesÎncă nu există evaluări
- Filtros Activos y Pasivos InformeDocument14 paginiFiltros Activos y Pasivos Informeray kevin cardenasÎncă nu există evaluări
- HDSL y SDSLDocument16 paginiHDSL y SDSLmarianelahotmailÎncă nu există evaluări
- 50 PreguntasDocument5 pagini50 PreguntasHugo Torres GarciaÎncă nu există evaluări
- Laboratorio de OsciladoresDocument11 paginiLaboratorio de OsciladoresFrancisco HidalgoÎncă nu există evaluări
- Practica 2 FisicaDocument12 paginiPractica 2 FisicaCesar MtzÎncă nu există evaluări
- Plan de ConmutacionDocument12 paginiPlan de ConmutacionFLAVIO MARTIN SOLANO ORDINOLAÎncă nu există evaluări
- Powest MicronetDocument1 paginăPowest MicronetCamilo Padilla De AlbaÎncă nu există evaluări
- Actividad No. 13 Circuitos ElectricosDocument2 paginiActividad No. 13 Circuitos ElectricosOmar Alexis GranadosÎncă nu există evaluări
- OMRON Manual E5AKDocument30 paginiOMRON Manual E5AKDariusÎncă nu există evaluări
- Instr - y - Control - TP - N6 4to3raDocument3 paginiInstr - y - Control - TP - N6 4to3raFacundoÎncă nu există evaluări
- Fallas Comunes Despues de Un Mantenimiento PreventivoDocument9 paginiFallas Comunes Despues de Un Mantenimiento PreventivoEdwiin SaldivarÎncă nu există evaluări
- SustentacionDocument4 paginiSustentacionjohn edinson quiñones valentierraÎncă nu există evaluări
- M03 - Costa - Biblioteca 1 - IieeDocument6 paginiM03 - Costa - Biblioteca 1 - IieeEudes Armas MatosÎncă nu există evaluări
- Catalago NuevoDocument55 paginiCatalago NuevoAli T. SolisÎncă nu există evaluări
- Antena BicónicaDocument5 paginiAntena BicónicaAndrésFelipeVelezÎncă nu există evaluări
- FireCR User-Manual ES 120326Document38 paginiFireCR User-Manual ES 120326rtr electronicaÎncă nu există evaluări
- Exposicion de Tableros ElectricosDocument55 paginiExposicion de Tableros ElectricosBryam Sotelo Condori80% (5)
- Emotron Fdu 2.1Document268 paginiEmotron Fdu 2.1pablo_tremÎncă nu există evaluări
- Guia de Aprendizaje Energia EólicaDocument12 paginiGuia de Aprendizaje Energia EólicaKevin RubénÎncă nu există evaluări
- Manual Cargador Convertec CA125-60FEADocument23 paginiManual Cargador Convertec CA125-60FEANicolás Mora0% (1)