S-ar putea să vă placă și
- Care - Maintenance of Endoscopy EquipmentDocument109 paginiCare - Maintenance of Endoscopy EquipmentSyed Mohamad FaridÎncă nu există evaluări
- ARI-8200 Installation Instruction (18042)Document36 paginiARI-8200 Installation Instruction (18042)Neyda Salas100% (1)
- Smart Energy Meter Using Arduino and GSM Sim900aDocument6 paginiSmart Energy Meter Using Arduino and GSM Sim900aRoman PuriÎncă nu există evaluări
- Vdocuments - MX Event Medical Inspiration Ventilator Service ManualDocument209 paginiVdocuments - MX Event Medical Inspiration Ventilator Service ManualMoath AlshabiÎncă nu există evaluări
- Sumo Robot PCB AssemblyDocument15 paginiSumo Robot PCB AssemblyBayu Kresna WiratamaÎncă nu există evaluări
- Lecture12-Using PIC Micro Controller 16F877ADocument57 paginiLecture12-Using PIC Micro Controller 16F877ADoodee Mohammed100% (4)
- 01.DP6600 DP6500 Operation Manual Basic CE 1.8Document111 pagini01.DP6600 DP6500 Operation Manual Basic CE 1.8Hugo Rafael Mino HernandezÎncă nu există evaluări
- MU 4080 English Version 1.0.0Document43 paginiMU 4080 English Version 1.0.0Matz100% (1)
- Omron Blood Pressure Monitor Hem-7200-C1Document1 paginăOmron Blood Pressure Monitor Hem-7200-C1PeladarÎncă nu există evaluări
- Diatermia Chapter7 - 00 PDFDocument34 paginiDiatermia Chapter7 - 00 PDFmanuel_rambitoÎncă nu există evaluări
- Alsa Alsatom SU-50,100,140 - User ManualDocument9 paginiAlsa Alsatom SU-50,100,140 - User ManualdianÎncă nu există evaluări
- BeneVision N22N19N17 IView System Operator's Manual (Win10) V1.0 enDocument20 paginiBeneVision N22N19N17 IView System Operator's Manual (Win10) V1.0 enbprzÎncă nu există evaluări
- Cdd131475-Manual Maquina de AnestesiaDocument20 paginiCdd131475-Manual Maquina de AnestesiaDavid Orlando Cordova NavarreteÎncă nu există evaluări
- SDC HD Ra2009-124Document9 paginiSDC HD Ra2009-124RenatoAlvesÎncă nu există evaluări
- MU Fesmed 4052 4054 ENG Rev02 092009Document25 paginiMU Fesmed 4052 4054 ENG Rev02 092009MatzÎncă nu există evaluări
- Temperature Sensing/Monitoring Using Lm35 & Atmega8Document6 paginiTemperature Sensing/Monitoring Using Lm35 & Atmega8Suket75% (4)
- Portable Fundus Camera FC160Document37 paginiPortable Fundus Camera FC160AbiÎncă nu există evaluări
- Interfacing 16x2 LCD With PIC16f877aDocument6 paginiInterfacing 16x2 LCD With PIC16f877aTeo JavaÎncă nu există evaluări
- Dixion EngDocument24 paginiDixion Engiman hilmanÎncă nu există evaluări
- Technical Specification Instramed Cardiomax NewDocument6 paginiTechnical Specification Instramed Cardiomax NewDwi SanitaÎncă nu există evaluări
- BHA3000 Engineer Training SeriesDocument90 paginiBHA3000 Engineer Training SeriesMichael RaymondÎncă nu există evaluări
- ADB Maintenance-Manual-Fcu PDFDocument102 paginiADB Maintenance-Manual-Fcu PDFzahum94839063Încă nu există evaluări
- Thesis of Design of AC DriveDocument41 paginiThesis of Design of AC Driveصدام حسینÎncă nu există evaluări
- 82-01.54.455696-1.4 C3, C6, C6 HD Video Colposcope Service Manual-ESDocument88 pagini82-01.54.455696-1.4 C3, C6, C6 HD Video Colposcope Service Manual-ESВалентина Кудаева100% (1)
- 516962-09-UK ANAESTIVAC-unlockedDocument16 pagini516962-09-UK ANAESTIVAC-unlockedSimple LangÎncă nu există evaluări
- UW-5 Omeng0000Document58 paginiUW-5 Omeng0000Guillermo Jesus Avila ArrietaÎncă nu există evaluări
- Dyonics Electroblade ResectorDocument68 paginiDyonics Electroblade ResectorJeanfreyÎncă nu există evaluări
- PV 10 User ManualDocument44 paginiPV 10 User ManualVictor GodoyÎncă nu există evaluări
- MTC Operation ManualDocument32 paginiMTC Operation ManualXcd SteflerÎncă nu există evaluări
- Infinity C Arm KiranDocument2 paginiInfinity C Arm Kiranjyoti ranjanÎncă nu există evaluări
- Automatic Control of Hydraulic Machine Using PLCDocument5 paginiAutomatic Control of Hydraulic Machine Using PLCIJSTEÎncă nu există evaluări
- Technical - Manual - For - Agilia - SP - Range - in - v1.6 - Agilia SP MC - EngDocument302 paginiTechnical - Manual - For - Agilia - SP - Range - in - v1.6 - Agilia SP MC - EngAurélie GOURDON-WALKERÎncă nu există evaluări
- Cancellation of Ecg From Emg SignalDocument20 paginiCancellation of Ecg From Emg SignalDeepashree DevarajÎncă nu există evaluări
- MR850 Humidifier User ManualDocument2 paginiMR850 Humidifier User ManualnahuediazÎncă nu există evaluări
- New Catalogue 2018Document7 paginiNew Catalogue 2018Haliun AltangerelÎncă nu există evaluări
- Autoclaves Spec2020Document10 paginiAutoclaves Spec2020Lamer HassenÎncă nu există evaluări
- Kew Snap: Instruction ManualDocument24 paginiKew Snap: Instruction ManualClaudio CostaÎncă nu există evaluări
- Sterilwave Hazardous Waste Management System RangeDocument23 paginiSterilwave Hazardous Waste Management System RangeBeo BoRoÎncă nu există evaluări
- Software Functions ACTURA® 2427, 4827 and 4860 SYSTEMS: 1. 2. Display of Status Parameters 3Document14 paginiSoftware Functions ACTURA® 2427, 4827 and 4860 SYSTEMS: 1. 2. Display of Status Parameters 3Thien TqÎncă nu există evaluări
- BooksDocument44 paginiBooksSham-aan AliÎncă nu există evaluări
- Electro - Surgical Unit DiathermyDocument21 paginiElectro - Surgical Unit DiathermySalinder Kaur DhaliwalÎncă nu există evaluări
- Fluke Precision Measurement Total Solutions in CalibrationDocument42 paginiFluke Precision Measurement Total Solutions in Calibrationazuranan100% (1)
- User Manual X RayDocument130 paginiUser Manual X RayM Agung FatahillahÎncă nu există evaluări
- NIM System: Installation ManualDocument32 paginiNIM System: Installation ManualAriMooskyterÎncă nu există evaluări
- Defibrillator TesterDocument4 paginiDefibrillator Testerdenivaldo2009Încă nu există evaluări
- Reverberi Sterilix Baby Sterilizer - Service ManualDocument26 paginiReverberi Sterilix Baby Sterilizer - Service ManualMoyses MoyÎncă nu există evaluări
- Ghost Creation-Recovery Procedure.Document7 paginiGhost Creation-Recovery Procedure.Subin M SukumaranÎncă nu există evaluări
- GE Cardioserv - User ManualDocument126 paginiGE Cardioserv - User ManualJavier Martinez Zamora100% (1)
- Manual SMC Dialog Plus Controller. Allen BradleyDocument189 paginiManual SMC Dialog Plus Controller. Allen BradleygreenlinexÎncă nu există evaluări
- NS-30A Operating ManualDocument246 paginiNS-30A Operating Manualbayman66Încă nu există evaluări
- User Manual Autoclave Ha-Bav150Document21 paginiUser Manual Autoclave Ha-Bav150TerraTerro Welleh WellehÎncă nu există evaluări
- Manual PR 700 ArtikoDocument32 paginiManual PR 700 ArtikoAnonymous N7TtEsg100% (1)
- ACUSON P500™ Ultrasound System, FROSK Edition: TransducersDocument6 paginiACUSON P500™ Ultrasound System, FROSK Edition: Transducersahmed_galal_waly1056Încă nu există evaluări
- HS-4050Ge 1509Document61 paginiHS-4050Ge 1509ABDALLAÎncă nu există evaluări
- Electrical Overstress (EOS): Devices, Circuits and SystemsDe la EverandElectrical Overstress (EOS): Devices, Circuits and SystemsÎncă nu există evaluări
- Knowledge is "Real Power": Introduction to Power QualityDe la EverandKnowledge is "Real Power": Introduction to Power QualityÎncă nu există evaluări
- Active Disturbance Rejection Control for Nonlinear Systems: An IntroductionDe la EverandActive Disturbance Rejection Control for Nonlinear Systems: An IntroductionÎncă nu există evaluări
- Digital Logic DesignDocument58 paginiDigital Logic Designyousaf hameedÎncă nu există evaluări
- Step-Size: ImplementationDocument4 paginiStep-Size: Implementationyousaf hameedÎncă nu există evaluări
- Evaluation of The Main MPPT Techniques For Photovoltaic Applications PDFDocument12 paginiEvaluation of The Main MPPT Techniques For Photovoltaic Applications PDFnmotanÎncă nu există evaluări
- Optimization of Perturb and Observe MPPT MethodDocument11 paginiOptimization of Perturb and Observe MPPT MethodMarco PassafiumeÎncă nu există evaluări
- Computer Organization and Architecture (COA) DEC 2017 Solved Question PaperDocument31 paginiComputer Organization and Architecture (COA) DEC 2017 Solved Question PapermaharshisanandyadavÎncă nu există evaluări
- Supporting Hardware For 8085Document2 paginiSupporting Hardware For 8085Sachin JaysenanÎncă nu există evaluări
- Oscillator Definition, Types, and ApplicationsDocument8 paginiOscillator Definition, Types, and ApplicationsaaaaaaaliÎncă nu există evaluări
- ADSP-21065L DSP Microcomputer: Jtag Dual-Ported Sram Core ProcessorDocument44 paginiADSP-21065L DSP Microcomputer: Jtag Dual-Ported Sram Core ProcessorsruharithaÎncă nu există evaluări
- Digital ElectronicsDocument13 paginiDigital ElectronicsPrateek MudgilÎncă nu există evaluări
- Prog New VHDLDocument7 paginiProg New VHDLRjeevÎncă nu există evaluări
- Asynchronous FIFO FinalDocument16 paginiAsynchronous FIFO FinalAyush Katyal100% (1)
- Traffic Light Controller: Using VHDLDocument22 paginiTraffic Light Controller: Using VHDLSerendipity IntendedÎncă nu există evaluări
- 74HC162Document12 pagini74HC162MUHAMMAD SISWANTOROÎncă nu există evaluări
- Features: Monolithic Dial-Tuned AM/FM Receiver Radio-on-a-Chip™Document25 paginiFeatures: Monolithic Dial-Tuned AM/FM Receiver Radio-on-a-Chip™Mauro SergioÎncă nu există evaluări
- Application Note 18: The ARM6 Family Bus InterfaceDocument22 paginiApplication Note 18: The ARM6 Family Bus InterfaceVINAY YADAVÎncă nu există evaluări
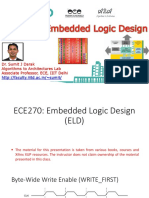
- ECE 270: Embedded Logic Design: Dr. Sumit J Darak Algorithms To Architectures Lab Associate Professor, ECE, IIIT DelhiDocument34 paginiECE 270: Embedded Logic Design: Dr. Sumit J Darak Algorithms To Architectures Lab Associate Professor, ECE, IIIT DelhiMath CalculatorÎncă nu există evaluări
- Add 7 Addfem Sequence of Event: Manual Edition 07/2012Document29 paginiAdd 7 Addfem Sequence of Event: Manual Edition 07/2012Bastian ValentinoÎncă nu există evaluări
- Embedded SystemDocument118 paginiEmbedded SystemYilikal MengeduÎncă nu există evaluări
- Toyocom Cristal OscillatorsDocument58 paginiToyocom Cristal Oscillatorsb33g33100% (1)
- ADE7755Document16 paginiADE7755Omar Antonio Marrugo EspitiaÎncă nu există evaluări
- What Are The Different Types of Delays in ASIC or VLSI Design?Document38 paginiWhat Are The Different Types of Delays in ASIC or VLSI Design?sureshÎncă nu există evaluări
- Max FreqDocument2 paginiMax Freqrakesh_111Încă nu există evaluări
- General Description: 8-Bit Universal Shift Register 3-StateDocument20 paginiGeneral Description: 8-Bit Universal Shift Register 3-StateDanang ErwantoÎncă nu există evaluări
- 1.timing Optimization Techniques: 1. MappingDocument152 pagini1.timing Optimization Techniques: 1. MappingPraveen Kumar100% (1)
- Setup and Hold Time": Static Timing Analysis (STA) Basic (Part 3c) - VLSI ConceptsDocument14 paginiSetup and Hold Time": Static Timing Analysis (STA) Basic (Part 3c) - VLSI ConceptsKeerthiKalyanÎncă nu există evaluări
- What Are Set Up Time & Hold Time Constraints - What Do They Signify - Which One Is Critical For Estimating Maximum Clock Frequency of A CircuitDocument2 paginiWhat Are Set Up Time & Hold Time Constraints - What Do They Signify - Which One Is Critical For Estimating Maximum Clock Frequency of A CircuitRakesh KumarÎncă nu există evaluări
- DE2 115 Pin AssignmentDocument4 paginiDE2 115 Pin AssignmentKamal HaydarÎncă nu există evaluări
- BTS3902E WCDMA Technical Description V100R008C0 2Document31 paginiBTS3902E WCDMA Technical Description V100R008C0 2Tarek El DeghedyÎncă nu există evaluări
- Device Control Through Bluetooth PDFDocument23 paginiDevice Control Through Bluetooth PDFSamit TandukarÎncă nu există evaluări
- Philips XPV 320 RevDocument30 paginiPhilips XPV 320 RevAnil KumarÎncă nu există evaluări
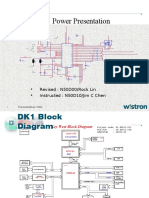
- DK1 Power PresentationDocument21 paginiDK1 Power PresentationSammy ModecaiÎncă nu există evaluări
- 4-Bit Synchronous Counter: Final ProjectDocument7 pagini4-Bit Synchronous Counter: Final Projectahmed IsmailÎncă nu există evaluări
- Kenwood Gx-401ef2 SubaruDocument27 paginiKenwood Gx-401ef2 SubaruDaniel BarbuÎncă nu există evaluări
- Asynchronous Counters Are Those Whose Output Is Free From The Clock SignalDocument2 paginiAsynchronous Counters Are Those Whose Output Is Free From The Clock SignalayushÎncă nu există evaluări