S-ar putea să vă placă și
- ICA For G-3000Document107 paginiICA For G-3000AsgharÎncă nu există evaluări
- Essentials For A Good Night'S Sleep: Mattresses, Duvets and PillowsDocument4 paginiEssentials For A Good Night'S Sleep: Mattresses, Duvets and PillowselizondomaruÎncă nu există evaluări
- Unified Real-Time Object DetectionDocument36 paginiUnified Real-Time Object Detectionvrashikesh patilÎncă nu există evaluări
- ICIP 2005 Tutorial: Presented byDocument55 paginiICIP 2005 Tutorial: Presented byanabikpalÎncă nu există evaluări
- Deep Neural Network ASICs The Ultimate Step-By-Step GuideDe la EverandDeep Neural Network ASICs The Ultimate Step-By-Step GuideÎncă nu există evaluări
- Object Detection Methods ComparisonDocument20 paginiObject Detection Methods Comparisonrohith mukkamala67% (3)
- AST F2033 Hip JointDocument5 paginiAST F2033 Hip Jointdeepdreamx6400Încă nu există evaluări
- PROJECT REPORT Vidoe TrackingDocument27 paginiPROJECT REPORT Vidoe TrackingKunal KucheriaÎncă nu există evaluări
- Convolutional Neural NetworksDocument13 paginiConvolutional Neural NetworksSrikanth YadavÎncă nu există evaluări
- Brown Tonality and Form in Debussey PDFDocument18 paginiBrown Tonality and Form in Debussey PDFShawn SherwoodÎncă nu există evaluări
- A Gentle Introduction To Graph Neural NetworksDocument9 paginiA Gentle Introduction To Graph Neural NetworksEric K. A. YarteyÎncă nu există evaluări
- Unified Real-Time Object Detection with YOLODocument10 paginiUnified Real-Time Object Detection with YOLOfernandovaras2005Încă nu există evaluări
- Accident Alert and Vehicle Tracking System IJERTV9IS110129Document5 paginiAccident Alert and Vehicle Tracking System IJERTV9IS110129Tawan JimÎncă nu există evaluări
- Computer VisionDocument4 paginiComputer VisionSurya Mani SharmaÎncă nu există evaluări
- Implementation of Real-Time Object Detection System Using Machine Learning AlgorithmDocument12 paginiImplementation of Real-Time Object Detection System Using Machine Learning AlgorithmIJRASETPublications100% (1)
- Accident Data Analysis Using Machine LearningDocument6 paginiAccident Data Analysis Using Machine LearningIJRASETPublicationsÎncă nu există evaluări
- PCB Design Guidelines For Reduced EMIDocument23 paginiPCB Design Guidelines For Reduced EMIEdgar Eduardo Medina CastañedaÎncă nu există evaluări
- PCB Design Guidelines For Reduced EMIDocument23 paginiPCB Design Guidelines For Reduced EMIEdgar Eduardo Medina CastañedaÎncă nu există evaluări
- Aspect Based Sentiment Analysis Approaches and AlgorithmsDocument4 paginiAspect Based Sentiment Analysis Approaches and AlgorithmsInternational Journal of Innovative Science and Research TechnologyÎncă nu există evaluări
- Seminar On "Image Processing"Document20 paginiSeminar On "Image Processing"Sudhir Phophaliya100% (1)
- Analytical Study On Object Detection Using Yolo AlgorithmDocument3 paginiAnalytical Study On Object Detection Using Yolo AlgorithmInternational Journal of Innovative Science and Research TechnologyÎncă nu există evaluări
- Opinion Mining For Text Data An OverviewDocument13 paginiOpinion Mining For Text Data An OverviewIJRASETPublicationsÎncă nu există evaluări
- Smart Phone Product Review Using SVM Technique of Sentiment AnalysisDocument9 paginiSmart Phone Product Review Using SVM Technique of Sentiment AnalysisIJRASETPublicationsÎncă nu există evaluări
- Implementation of Combination of Simple Additive Weighting (SAW) and Analytical Hierarchy Process (AHP) Method To Determine Employee Salary Increase in PT. Spring Island Travel PDFDocument5 paginiImplementation of Combination of Simple Additive Weighting (SAW) and Analytical Hierarchy Process (AHP) Method To Determine Employee Salary Increase in PT. Spring Island Travel PDFInternational Journal of Innovative Science and Research TechnologyÎncă nu există evaluări
- Economic DispatchDocument37 paginiEconomic DispatchHasan KurniawanÎncă nu există evaluări
- Robotics Chapter 5 - Robot VisionDocument7 paginiRobotics Chapter 5 - Robot Visiontutorfelix777Încă nu există evaluări
- Object Detection Using YOLODocument9 paginiObject Detection Using YOLOIJRASETPublicationsÎncă nu există evaluări
- Sentiment Analysis Techniques A ReviewDocument5 paginiSentiment Analysis Techniques A ReviewInternational Journal of Innovative Science and Research TechnologyÎncă nu există evaluări
- Basic Education Research AgendaDocument41 paginiBasic Education Research AgendaKristine Barredo100% (1)
- Minor ProjectDocument21 paginiMinor ProjectAvilash PradhanÎncă nu există evaluări
- Survey On Different Object Detection and Segmentation MethodsDocument4 paginiSurvey On Different Object Detection and Segmentation MethodsInternational Journal of Innovative Science and Research TechnologyÎncă nu există evaluări
- Object Detector For Blind PersonDocument20 paginiObject Detector For Blind PersonRabiul islamÎncă nu există evaluări
- Vehicle Detection For Accident PreventionDocument7 paginiVehicle Detection For Accident PreventionIJRASETPublicationsÎncă nu există evaluări
- Automatics Vehicle License Plate Recognition Using MATLABDocument5 paginiAutomatics Vehicle License Plate Recognition Using MATLABjohnsonÎncă nu există evaluări
- Real Time Object Recognition and ClassificationDocument6 paginiReal Time Object Recognition and ClassificationVirat singhÎncă nu există evaluări
- Video Segmentation For Moving Object Detection Using Local Change & Entropy Based Adaptive Window ThresholdingDocument12 paginiVideo Segmentation For Moving Object Detection Using Local Change & Entropy Based Adaptive Window ThresholdingCS & ITÎncă nu există evaluări
- 1.1 Purpose: 1.2 Scope: 1.3 Motivation: 1.4 OverviewDocument22 pagini1.1 Purpose: 1.2 Scope: 1.3 Motivation: 1.4 OverviewVikram ComputerInstitute100% (1)
- Text and Face DetectionDocument82 paginiText and Face DetectionGangadhar BiradarÎncă nu există evaluări
- IotDocument3 paginiIotgdeepthi0% (2)
- Object Detection Using Convolution Al Neural NetworksDocument6 paginiObject Detection Using Convolution Al Neural NetworksAnita JaiswalÎncă nu există evaluări
- Real Time Object MeasurementDocument3 paginiReal Time Object MeasurementThong NguyenÎncă nu există evaluări
- Real-time object detection modelDocument3 paginiReal-time object detection modelANURAG V NAIRÎncă nu există evaluări
- Traffic Analysis Based On Digital Image Processing in PythonDocument7 paginiTraffic Analysis Based On Digital Image Processing in Pythonpraveena.sÎncă nu există evaluări
- What Is Deep Learning?: Artificial Intelligence Machine LearningDocument3 paginiWhat Is Deep Learning?: Artificial Intelligence Machine Learninghadi645Încă nu există evaluări
- ANPR - The Complete Automatic Number Plate Recognition SolutionDocument4 paginiANPR - The Complete Automatic Number Plate Recognition SolutionLem Mantilla100% (1)
- SEMINARDocument13 paginiSEMINARRAM LAXMANÎncă nu există evaluări
- ANPR ReportDocument52 paginiANPR ReportPuneet Kumar Singh0% (1)
- CS341 Software Quality Assurance and Testing - Tutorial2-SolutionDocument3 paginiCS341 Software Quality Assurance and Testing - Tutorial2-SolutionAman PrasadÎncă nu există evaluări
- U-Net Convolutional Network for Biomedical Image SegmentationDocument8 paginiU-Net Convolutional Network for Biomedical Image SegmentationUsman SaeedÎncă nu există evaluări
- Data Profiling Overview: What Is Data Profiling, and How Can It Help With Data Quality?Document3 paginiData Profiling Overview: What Is Data Profiling, and How Can It Help With Data Quality?Nilesh PatilÎncă nu există evaluări
- UID Note Chapter 1 3Document23 paginiUID Note Chapter 1 3Kiran KhanalÎncă nu există evaluări
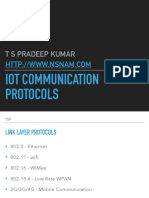
- Iot Communication ProtocolsDocument27 paginiIot Communication ProtocolsSimrandeep SinghÎncă nu există evaluări
- Project Detecto!: A Real-Time Object Detection ModelDocument3 paginiProject Detecto!: A Real-Time Object Detection ModelANURAG V NAIRÎncă nu există evaluări
- Facemask Detection Using MMdetection ToolboxDocument6 paginiFacemask Detection Using MMdetection ToolboxInternational Journal of Innovative Science and Research TechnologyÎncă nu există evaluări
- 15CS81 Internet of Things Course OverviewDocument76 pagini15CS81 Internet of Things Course OverviewShameek MangaloreÎncă nu există evaluări
- Report About Neural Network For Image ClassificationDocument51 paginiReport About Neural Network For Image ClassificationVivek Singh ChaudharyÎncă nu există evaluări
- Movie Recommendation System Using Simple Recommender-Based ApproachDocument4 paginiMovie Recommendation System Using Simple Recommender-Based ApproachInternational Journal of Innovative Science and Research TechnologyÎncă nu există evaluări
- Group13 Ecea200-1l FinalmanuscriptDocument57 paginiGroup13 Ecea200-1l FinalmanuscriptKim Andre MacaraegÎncă nu există evaluări
- Understanding AlexNetDocument8 paginiUnderstanding AlexNetlizhi2012Încă nu există evaluări
- Introduction To Parallel ComputingDocument52 paginiIntroduction To Parallel ComputingSakshi97100% (1)
- Autonomous Driving (Case Study) : Required To Pass: 80% or Higher You Can Retake This Quiz Up To 3 Times Every 8 HoursDocument15 paginiAutonomous Driving (Case Study) : Required To Pass: 80% or Higher You Can Retake This Quiz Up To 3 Times Every 8 HoursshreeÎncă nu există evaluări
- Weakly-Supervised Deep Embedding For Product Review Sentiment AnalysisDocument12 paginiWeakly-Supervised Deep Embedding For Product Review Sentiment AnalysisKrishna KumarÎncă nu există evaluări
- ML Training by Custom Yolo v5Document56 paginiML Training by Custom Yolo v5Jone EdenÎncă nu există evaluări
- Energy Management in Smart Grids Using Embedded System & IOTDocument5 paginiEnergy Management in Smart Grids Using Embedded System & IOTEditor IJRITCCÎncă nu există evaluări
- Recurrent Neural Networks: CS60010: Deep LearningDocument48 paginiRecurrent Neural Networks: CS60010: Deep LearningalokÎncă nu există evaluări
- Bird Species Classification Using Deep Learning Literature SurveyDocument27 paginiBird Species Classification Using Deep Learning Literature Surveyharshithays100% (2)
- YoloDocument10 paginiYoloTitle TubeÎncă nu există evaluări
- Red Mon 2016Document10 paginiRed Mon 2016Anand Balagar [021]Încă nu există evaluări
- Fast AutoAugmentDocument10 paginiFast AutoAugmentEdgar Eduardo Medina CastañedaÎncă nu există evaluări
- Digital Signal and Image Processing Using Matlab. Gerard Blanchet and Maurice Charbit PDFDocument764 paginiDigital Signal and Image Processing Using Matlab. Gerard Blanchet and Maurice Charbit PDFRicardoSalazarEscalanteÎncă nu există evaluări
- AudioDocument77 paginiAudioSubzerot SubzerogÎncă nu există evaluări
- PWM Freq Arduino DueDocument9 paginiPWM Freq Arduino DueEdgar Eduardo Medina CastañedaÎncă nu există evaluări
- An1680 DDocument12 paginiAn1680 DEdgar Eduardo Medina CastañedaÎncă nu există evaluări
- Dsp1736fpga en VsDocument7 paginiDsp1736fpga en VsEdgar Eduardo Medina CastañedaÎncă nu există evaluări
- Programador PICDocument1 paginăProgramador PICEdgar Eduardo Medina CastañedaÎncă nu există evaluări
- PWM Freq Arduino DueDocument9 paginiPWM Freq Arduino DueEdgar Eduardo Medina CastañedaÎncă nu există evaluări
- Implementasi Pembelajaran Pendidikan Jasmani Dan Olahraga Kesehatan Dalam Perspektif Standar Nasional Pendidikan Di SMP Negeri 46 PalembangDocument20 paginiImplementasi Pembelajaran Pendidikan Jasmani Dan Olahraga Kesehatan Dalam Perspektif Standar Nasional Pendidikan Di SMP Negeri 46 PalembangDionisius Marcel GintingÎncă nu există evaluări
- Industry 4.0 CourseDocument49 paginiIndustry 4.0 CourseThiruvengadam CÎncă nu există evaluări
- FloSet 80 ABVDocument1 paginăFloSet 80 ABVHector TosarÎncă nu există evaluări
- Negotiation - Course Outline APR17Document8 paginiNegotiation - Course Outline APR17ravindrarao_mÎncă nu există evaluări
- MiVoice Office 400 Products BR enDocument12 paginiMiVoice Office 400 Products BR enWalter MejiaÎncă nu există evaluări
- WarpriestDocument8 paginiWarpriestBenguin Oliver MasonÎncă nu există evaluări
- HelicommandDocument11 paginiHelicommandNandin OnÎncă nu există evaluări
- Maintenance Manual LH 350 Flight Helmet: Confidential IndustryDocument18 paginiMaintenance Manual LH 350 Flight Helmet: Confidential Industrynelson vasquezÎncă nu există evaluări
- 02 - MDS System and ControlDocument55 pagini02 - MDS System and Controlchinith100% (1)
- EE331 Lab 1 v2Document13 paginiEE331 Lab 1 v2Áo ĐenÎncă nu există evaluări
- Apps Associates - Introductory Profile GENDocument15 paginiApps Associates - Introductory Profile GENRodrigo MarquesÎncă nu există evaluări
- Masterseal Plus CatalogueDocument8 paginiMasterseal Plus CataloguePeter ManÎncă nu există evaluări
- Manual For ItransDocument133 paginiManual For ItransAbhijit Todkar100% (1)
- Polyken Pipeline #1027,: Primers #1019Document3 paginiPolyken Pipeline #1027,: Primers #1019Azmi SyariefÎncă nu există evaluări
- Elon Musk - WikipediaDocument64 paginiElon Musk - WikipediaPranay jalluÎncă nu există evaluări
- Manual de ServicioDocument196 paginiManual de ServicioJuan P. Ibanez CorreaÎncă nu există evaluări
- MobisudDocument2 paginiMobisudNguyen Duy KhangÎncă nu există evaluări
- Cylinder Head Valve Guide and Seat Inspection and RepairDocument1 paginăCylinder Head Valve Guide and Seat Inspection and Repairnetifig352Încă nu există evaluări
- Sumit Pandey CVDocument3 paginiSumit Pandey CVSumit PandeyÎncă nu există evaluări
- BW17V1D24Document5 paginiBW17V1D24Lye YpÎncă nu există evaluări
- MOHID Water Training Courses: Project InformationDocument1 paginăMOHID Water Training Courses: Project InformationSaaz ZeeÎncă nu există evaluări
- The Service Owner Role in ITIL v3: by Kai HolthausDocument6 paginiThe Service Owner Role in ITIL v3: by Kai HolthausSavitha MohanÎncă nu există evaluări
- Commercial Grade Dedication GuidanceDocument64 paginiCommercial Grade Dedication Guidancealien686Încă nu există evaluări
- Modern Control Technology Components & Systems (2nd Ed.)Document2 paginiModern Control Technology Components & Systems (2nd Ed.)musarraf172Încă nu există evaluări