S-ar putea să vă placă și
- Nammsyra 000045Document195 paginiNammsyra 000045Dalia MuraddÎncă nu există evaluări
- Nammsyra 000022Document2.152 paginiNammsyra 000022Dalia MuraddÎncă nu există evaluări
- Nammsyra 000040Document1.567 paginiNammsyra 000040Dalia MuraddÎncă nu există evaluări
- Nasmsyra 000001Document44 paginiNasmsyra 000001Dalia MuraddÎncă nu există evaluări
- Nammsyra 000023Document3.920 paginiNammsyra 000023Dalia MuraddÎncă nu există evaluări
- Nammsyra 000042Document107 paginiNammsyra 000042Dalia MuraddÎncă nu există evaluări
- Nammsyra 000021Document793 paginiNammsyra 000021Dalia MuraddÎncă nu există evaluări
- Nammsyra 000013Document1.074 paginiNammsyra 000013Dalia MuraddÎncă nu există evaluări
- Nammsyra 000044Document100 paginiNammsyra 000044Dalia MuraddÎncă nu există evaluări
- Nammsyra 000046Document1.116 paginiNammsyra 000046Dalia MuraddÎncă nu există evaluări
- Nammsyra 000019Document2.610 paginiNammsyra 000019Dalia MuraddÎncă nu există evaluări
- Nammsyra 000047Document396 paginiNammsyra 000047Dalia MuraddÎncă nu există evaluări
- Nammsyra 000017Document709 paginiNammsyra 000017Dalia MuraddÎncă nu există evaluări
- Nammsyra 000016Document2.135 paginiNammsyra 000016Dalia MuraddÎncă nu există evaluări
- Nammsyra 000014Document1.321 paginiNammsyra 000014Dalia MuraddÎncă nu există evaluări
- Nammsyra 000012Document2.028 paginiNammsyra 000012Dalia MuraddÎncă nu există evaluări
- Nammsyra 000015Document1.605 paginiNammsyra 000015Dalia MuraddÎncă nu există evaluări
- Nammsyra 000009Document320 paginiNammsyra 000009Dalia MuraddÎncă nu există evaluări
- Nammsyra 000005Document48 paginiNammsyra 000005Dalia MuraddÎncă nu există evaluări
- Nammsyra 000011Document704 paginiNammsyra 000011Dalia MuraddÎncă nu există evaluări
- CommunicativeDocument38 paginiCommunicativeDalia MuraddÎncă nu există evaluări
- BRS OSI GO 017 Aircraft Pushback ProceduresDocument14 paginiBRS OSI GO 017 Aircraft Pushback ProceduresDalia MuraddÎncă nu există evaluări
- Nammsyra 000004Document110 paginiNammsyra 000004Dalia MuraddÎncă nu există evaluări
- Nammsyra 000006Document26 paginiNammsyra 000006Dalia MuraddÎncă nu există evaluări
- Nammsyra 000008Document160 paginiNammsyra 000008Dalia MuraddÎncă nu există evaluări
- A319-320-321 Flight Deck and Systems Briefing For PilotsDocument223 paginiA319-320-321 Flight Deck and Systems Briefing For PilotsDalia MuraddÎncă nu există evaluări
- GrammarDocument32 paginiGrammarDalia MuraddÎncă nu există evaluări
- A320 Question Bank APUDocument29 paginiA320 Question Bank APUDalia MuraddÎncă nu există evaluări
- Easa Ad 2022-0096R1 1Document6 paginiEasa Ad 2022-0096R1 1Dalia MuraddÎncă nu există evaluări
- Els Program AdmissionDocument1 paginăEls Program AdmissionDalia MuraddÎncă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- PriceListHirePurchase Normal 4 PDFDocument55 paginiPriceListHirePurchase Normal 4 PDFAbdul SamadÎncă nu există evaluări
- 7.what Is The MAIN Benefit of Designing Tests Early in The Life Cycle?Document8 pagini7.what Is The MAIN Benefit of Designing Tests Early in The Life Cycle?Pravin AbhaleÎncă nu există evaluări
- ER2 - DFDsDocument11 paginiER2 - DFDsmohammed ashrafÎncă nu există evaluări
- 02-Thermodynamic Process (Practice Problem)Document8 pagini02-Thermodynamic Process (Practice Problem)Aditya GuptaÎncă nu există evaluări
- Carl Thesis 6Document14 paginiCarl Thesis 6Khen DenostaÎncă nu există evaluări
- iCEDQ Ebooks - DataOps Implementation GuideDocument13 paginiiCEDQ Ebooks - DataOps Implementation GuideThirumalarao PullivarthiÎncă nu există evaluări
- Lyapunov Theory - Non-Autonomous PDFDocument4 paginiLyapunov Theory - Non-Autonomous PDFLeandro C. AraújoÎncă nu există evaluări
- Steady State ConductionDocument28 paginiSteady State ConductionMobashawir AlamÎncă nu există evaluări
- Lecture 5 AI ExerciseDocument24 paginiLecture 5 AI ExerciseAwais AliÎncă nu există evaluări
- Neural - N - Problems - MLPDocument15 paginiNeural - N - Problems - MLPAbdou AbdelaliÎncă nu există evaluări
- Availability Analysis (Second Law Analysis)Document47 paginiAvailability Analysis (Second Law Analysis)Syed YousufuddinÎncă nu există evaluări
- Control Chapter 1Document19 paginiControl Chapter 1Wilmar Antonio Zuluaga ArangoÎncă nu există evaluări
- Electromagnetic Levitation Using MATLAB Real Time Control ToolboxDocument3 paginiElectromagnetic Levitation Using MATLAB Real Time Control Toolboxrobert1234567mÎncă nu există evaluări
- Materi SDLCDocument16 paginiMateri SDLCAbdul HadiÎncă nu există evaluări
- PCM Report-Network AnalysisDocument2 paginiPCM Report-Network Analysisayessa evangelistaÎncă nu există evaluări
- 2 The 1st 2nd Laws of ThermodynamicsDocument136 pagini2 The 1st 2nd Laws of ThermodynamicsFahim Uddin100% (1)
- Jurnal Topo PepeDocument8 paginiJurnal Topo PepeniaÎncă nu există evaluări
- Pole Placement Control: State Space and Polynomial ApproachesDocument48 paginiPole Placement Control: State Space and Polynomial ApproachesZahoor AhmadÎncă nu există evaluări
- IIR Filter DesignDocument40 paginiIIR Filter DesignMxaz MyzxÎncă nu există evaluări
- ELEC 3002 HW Control TutorialDocument2 paginiELEC 3002 HW Control TutorialBalgo BalgobinÎncă nu există evaluări
- Whats That Thing EmbodimentDocument6 paginiWhats That Thing EmbodimenttrotheÎncă nu există evaluări
- Thermo1 - Module 4 - v2Document36 paginiThermo1 - Module 4 - v2lukeÎncă nu există evaluări
- Draft: Software Engineering (Ca725)Document55 paginiDraft: Software Engineering (Ca725)Amit kumarÎncă nu există evaluări
- Logistics 06 00004Document15 paginiLogistics 06 00004vaddi santosh kumarÎncă nu există evaluări
- Ball Balancing System: Department of Electronics Engineering Ramrao Adik Institute of Technology, Nerul, Navi MumbaiDocument14 paginiBall Balancing System: Department of Electronics Engineering Ramrao Adik Institute of Technology, Nerul, Navi MumbaiRed JustÎncă nu există evaluări
- Non-Linear Optimization With Constraints and Extra ArgumentsDocument4 paginiNon-Linear Optimization With Constraints and Extra Argumentspepitogrillo_1Încă nu există evaluări
- Pid ControllersDocument132 paginiPid Controllers14071988Încă nu există evaluări
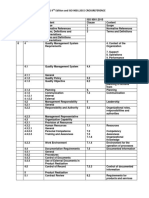
- Crossreference API Q1 9TH and ISO 9001 2015Document3 paginiCrossreference API Q1 9TH and ISO 9001 2015wachid50583% (6)
- Software Testing StrategiesDocument27 paginiSoftware Testing Strategiescmc0912Încă nu există evaluări
- Karyashala - Schedule - DLAISDocument1 paginăKaryashala - Schedule - DLAISciecseÎncă nu există evaluări