S-ar putea să vă placă și
- Aplicaciones Edo ExponencialDocument6 paginiAplicaciones Edo ExponencialWoody330% (1)
- 3 Levantamiento de CarreterasDocument16 pagini3 Levantamiento de CarreterasAlyson RochaÎncă nu există evaluări
- Diseño Geométrico Vial Mediante La Creación de Un Archivo Autocad Civil 3D 2015Document311 paginiDiseño Geométrico Vial Mediante La Creación de Un Archivo Autocad Civil 3D 2015Daniel Alejandro Navarro JaraÎncă nu există evaluări
- ODEmat 74Document14 paginiODEmat 74Hernán González AguirreÎncă nu există evaluări
- Resumen Completo Calculo 3Document10 paginiResumen Completo Calculo 3NICOLAS QUIROZ PASTORÎncă nu există evaluări
- Teoria AplicacionesDocument2 paginiTeoria Aplicaciones.,.Încă nu există evaluări
- Taller La PlaceDocument34 paginiTaller La PlaceJeison SanchezÎncă nu există evaluări
- Plano Osculador Normal y RectificanteDocument3 paginiPlano Osculador Normal y RectificanteDiego Ashtu SosaÎncă nu există evaluări
- 2 - Paredes (28522) PDFDocument21 pagini2 - Paredes (28522) PDFJose RamirezÎncă nu există evaluări
- Ecuacion LogisticaDocument13 paginiEcuacion LogisticaDaniel PalominoÎncă nu există evaluări
- Problemas de CurvasDocument5 paginiProblemas de CurvasCris GuajardoÎncă nu există evaluări
- Vector Tangente, Normal y CurvaturaDocument3 paginiVector Tangente, Normal y CurvaturacodexÎncă nu există evaluări
- Calculo II FVVRDocument5 paginiCalculo II FVVRAlexander Eyzaguirre CuadrosÎncă nu există evaluări
- La Ecuación de OndaDocument16 paginiLa Ecuación de OndaAngel Del Toro RamosÎncă nu există evaluări
- Aplicaciones ProyectoDocument8 paginiAplicaciones ProyectoNicole AriasÎncă nu există evaluări
- CMII 16 17 Solucion SeptiembreDocument7 paginiCMII 16 17 Solucion Septiembrealexomar27Încă nu există evaluări
- La Población de Un Pueblo Crece Con Una Razón Proporcional A La Población en El Tiempo ? EDDocument5 paginiLa Población de Un Pueblo Crece Con Una Razón Proporcional A La Población en El Tiempo ? EDeduardoÎncă nu există evaluări
- T8 RelatividadDocument3 paginiT8 RelatividadEduardo Latorre LopezÎncă nu există evaluări
- I1 Tav2020Document7 paginiI1 Tav2020Tobias HerectusÎncă nu există evaluări
- Deduccion de Las Ecuaciones de Navier yDocument7 paginiDeduccion de Las Ecuaciones de Navier yIván RamosÎncă nu există evaluări
- Ecuaciones Diferenciales - Actividad Evaluativa Eje 3 - TallerDocument10 paginiEcuaciones Diferenciales - Actividad Evaluativa Eje 3 - Talleremanuel penagos villaÎncă nu există evaluări
- Clase 3 U3 (Transformada de Laplace)Document5 paginiClase 3 U3 (Transformada de Laplace)LokitoPaTlpvRomeroHernandezÎncă nu există evaluări
- Grafica de Curvas en Forma Parametrica PDFDocument9 paginiGrafica de Curvas en Forma Parametrica PDFMichael Cristhian VillaclÎncă nu există evaluări
- Problemas de Laplace PDFDocument20 paginiProblemas de Laplace PDFJordan Fonseca AlarcónÎncă nu există evaluări
- Universidad Nacional de Ingenier IaDocument3 paginiUniversidad Nacional de Ingenier IaJunior Ortega TurpoÎncă nu există evaluări
- Nota Sobre Derivadas Integrales y DiferencialesDocument4 paginiNota Sobre Derivadas Integrales y DiferencialesLeonardo Agustin Veliz CallupeÎncă nu există evaluări
- Ejmplos Ley de Enfriamiento de NewtonDocument10 paginiEjmplos Ley de Enfriamiento de NewtonCarlos SarmientoÎncă nu există evaluări
- Apuntes de Clases EDPs - Separación de Variables PDFDocument17 paginiApuntes de Clases EDPs - Separación de Variables PDFdiegoÎncă nu există evaluări
- Ep - Lec 3Document6 paginiEp - Lec 3Gabriel EstradaÎncă nu există evaluări
- Tarea 4 07-07Document5 paginiTarea 4 07-07william triana perdomoÎncă nu există evaluări
- Velocidad y DistanciaDocument3 paginiVelocidad y DistanciaVictor HugoÎncă nu există evaluări
- Componente Tangencial y Normal de La AceleraciónDocument4 paginiComponente Tangencial y Normal de La AceleraciónJeidi QuinteroÎncă nu există evaluări
- Soluciones Por Medio de SeriesDocument12 paginiSoluciones Por Medio de SeriesJosehÎncă nu există evaluări
- La Población de Un Pueblo Crece Con Una Razón Proporcional A La Población en El Tiempo ? EDDocument4 paginiLa Población de Un Pueblo Crece Con Una Razón Proporcional A La Población en El Tiempo ? EDeduardoÎncă nu există evaluări
- Ecuaciones Diferenciales Eje4Document12 paginiEcuaciones Diferenciales Eje4yury AlexandraÎncă nu există evaluări
- Prob Bidim2 F100Document17 paginiProb Bidim2 F100Mauricio Rafael Vargas MamaniÎncă nu există evaluări
- Conceptos Generales Sobre SuperficiesDocument24 paginiConceptos Generales Sobre Superficiesfedee22Încă nu există evaluări
- CMII 17 18 Septiembre2018 OriginalDocument7 paginiCMII 17 18 Septiembre2018 OriginalEnergya CorporacionÎncă nu există evaluări
- Aplicaciones de Las Ecuaciones Diferenciales de Primer OrdenDocument20 paginiAplicaciones de Las Ecuaciones Diferenciales de Primer OrdenFa AnibalÎncă nu există evaluări
- Pauta I2Document4 paginiPauta I2felipe quezadaÎncă nu există evaluări
- Curvatura y TorcionDocument5 paginiCurvatura y Torcionrbkm_281040Încă nu există evaluări
- Contenido 10Document7 paginiContenido 10Raul RoaÎncă nu există evaluări
- Mas 2020BDocument8 paginiMas 2020BOSCO NEYRA LEIBNIZÎncă nu există evaluări
- Desarrollo Guía Resumen Prueba 1Document10 paginiDesarrollo Guía Resumen Prueba 1Benjamín Ignacio Román YáñezÎncă nu există evaluări
- Cálculo Integral Clase 13Document12 paginiCálculo Integral Clase 13Raúl DavidÎncă nu există evaluări
- Tarea EjerciciosDocument5 paginiTarea EjerciciosIsidro ManuelÎncă nu există evaluări
- CMII 18 19 Solucion SeptiembreDocument6 paginiCMII 18 19 Solucion SeptiembreEnergya CorporacionÎncă nu există evaluări
- TractizDocument9 paginiTractizRicardo Daniel Contreras ArredondoÎncă nu există evaluări
- Intersección de Curvas, Vector Normal y BinormalDocument8 paginiIntersección de Curvas, Vector Normal y BinormalLópez León Leonardo CamiloÎncă nu există evaluări
- Aplicaciones Edo (Taller) Nataly, Breiner, Yerli, RafaelDocument12 paginiAplicaciones Edo (Taller) Nataly, Breiner, Yerli, RafaelCristinaÎncă nu există evaluări
- Ejercicio - Mate 1Document6 paginiEjercicio - Mate 1KIMBERLY RAMIREZ CRUZÎncă nu există evaluări
- Calculo TrabajoDocument3 paginiCalculo TrabajoAnonymous 0HSHRvÎncă nu există evaluări
- Wuolah Free SOL3Document8 paginiWuolah Free SOL3SilviaÎncă nu există evaluări
- Cap 1Document9 paginiCap 1Sakae TakedaÎncă nu există evaluări
- Aletas de Enfriamiento Equipo5Document7 paginiAletas de Enfriamiento Equipo5Jessica Mata BritoÎncă nu există evaluări
- Hoja de EjerciciosDocument3 paginiHoja de Ejerciciosjofre cacaÎncă nu există evaluări
- Superficies y Curvas: Sepi Esiqie Ipn Matem Aticas Christian Bouchot 05 de Marzo 2007Document30 paginiSuperficies y Curvas: Sepi Esiqie Ipn Matem Aticas Christian Bouchot 05 de Marzo 2007MaryÎncă nu există evaluări
- Deber No 03 2023 ADocument32 paginiDeber No 03 2023 ASebastián ArcosÎncă nu există evaluări
- Evolutas PDFDocument3 paginiEvolutas PDFDai MontesÎncă nu există evaluări
- Problema 1 (Ejercicio 16.5) : KC Found in Part (B), Determine The Flow Rate W at Which The System Will Be On The VergeDocument14 paginiProblema 1 (Ejercicio 16.5) : KC Found in Part (B), Determine The Flow Rate W at Which The System Will Be On The VergeLeonel YairÎncă nu există evaluări
- Geometria Parte 1Document77 paginiGeometria Parte 1Jonathan Espinoza CamargoÎncă nu există evaluări
- Conexion ScotDocument1 paginăConexion ScotVillanueva AngeloÎncă nu există evaluări
- Acometida Trifasica Red AereaDocument2 paginiAcometida Trifasica Red AereaCarlos Colohua100% (1)
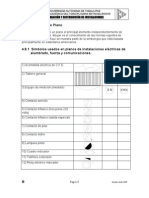
- Simbolos Usados en Elaboracion de Planos ElectricosDocument6 paginiSimbolos Usados en Elaboracion de Planos ElectricosMota de Polvo0% (1)
- VM000 74 PDFDocument40 paginiVM000 74 PDFJonathan Espinoza CamargoÎncă nu există evaluări
- Aprendizaje y Construccion Del Conocimiento Emilio Garcia GarciaDocument25 paginiAprendizaje y Construccion Del Conocimiento Emilio Garcia GarciaJhonatan Luis Huachaca ReyesÎncă nu există evaluări
- Catalogo Tuberia Cresco CT-001P-CREDocument12 paginiCatalogo Tuberia Cresco CT-001P-CREBrenda Ramirez GutierrezÎncă nu există evaluări
- Examen FotovoltaicosDocument1 paginăExamen FotovoltaicosJonathan Espinoza CamargoÎncă nu există evaluări
- Simbología EléctricaDocument8 paginiSimbología EléctricaJonathan Espinoza CamargoÎncă nu există evaluări
- Calculadora HP 30sDocument1 paginăCalculadora HP 30sIvansillo100% (1)
- BibliografiaDocument5 paginiBibliografiaJonathan Espinoza CamargoÎncă nu există evaluări
- AutomataDocument27 paginiAutomatacaportlandÎncă nu există evaluări
- Tema3 0Document21 paginiTema3 0Jonathan Espinoza CamargoÎncă nu există evaluări
- Tarjeta de ControDocument2 paginiTarjeta de ControJonathan Espinoza CamargoÎncă nu există evaluări
- Metodo HeurísticoDocument5 paginiMetodo HeurísticoLucesita Lucesita67% (3)
- Ahorro-Energético CONCLUSIONESDocument6 paginiAhorro-Energético CONCLUSIONESJonathan Espinoza CamargoÎncă nu există evaluări
- Proyecto de Ahorro Energético en Centros de TrabajosDocument14 paginiProyecto de Ahorro Energético en Centros de TrabajosJonathan Espinoza CamargoÎncă nu există evaluări
- Rectificador Monofasico de Media OndaDocument18 paginiRectificador Monofasico de Media OndaJonathan Espinoza CamargoÎncă nu există evaluări
- Convertidor Tema 5Document20 paginiConvertidor Tema 5Jonathan Espinoza CamargoÎncă nu există evaluări
- Analisis Foda GTRDocument2 paginiAnalisis Foda GTRJonathan Espinoza CamargoÎncă nu există evaluări
- TriacDocument15 paginiTriacMilet Cruz ZavalaÎncă nu există evaluări
- PWMDocument27 paginiPWMJonathan Espinoza Camargo100% (1)
- SCR 2Document7 paginiSCR 2Jonathan Espinoza CamargoÎncă nu există evaluări
- Simbología EléctricaDocument8 paginiSimbología EléctricaJonathan Espinoza CamargoÎncă nu există evaluări
- Valores Por UnidadDocument30 paginiValores Por UnidadJonathan Espinoza CamargoÎncă nu există evaluări
- IgbtDocument7 paginiIgbtJonathan Espinoza CamargoÎncă nu există evaluări
- Diagramas Unifilares y TrifilaresDocument23 paginiDiagramas Unifilares y TrifilaresJonathan Espinoza Camargo100% (2)
- Sistema PuDocument12 paginiSistema PuChristian Samario Street Cardenas BavestrelloÎncă nu există evaluări
- Rectif ControladoDocument18 paginiRectif ControladoJonathan Espinoza CamargoÎncă nu există evaluări
- Hidrograma Unitario... Final..Document23 paginiHidrograma Unitario... Final..zoly104Încă nu există evaluări
- Parcial Analisis 2Document30 paginiParcial Analisis 2Pepi VerónÎncă nu există evaluări
- Longitud de CurvaDocument14 paginiLongitud de CurvagabrielsantistebanÎncă nu există evaluări
- 2.1 Funciones Vectoriales - Ejercicios ResueltosDocument16 pagini2.1 Funciones Vectoriales - Ejercicios ResueltosGustavo Aquiles Oteiza Guerrero100% (3)
- Trayectorias Ortogonales FinalDocument32 paginiTrayectorias Ortogonales FinalCarlos Carranza100% (1)
- Aplicaciones de La DerivadaDocument2 paginiAplicaciones de La DerivadayordanÎncă nu există evaluări
- TP 07Document15 paginiTP 07Esteban FernándezÎncă nu există evaluări
- Taller - Calculo - III-1 TELEDocument4 paginiTaller - Calculo - III-1 TELENemesyzzÎncă nu există evaluări
- Topografico San JoseDocument30 paginiTopografico San JoseGilmer AHÎncă nu există evaluări
- Introducción A La Estadística: Distribución Normal y Distribución Normal Estandarizada - Ana Rebeca UrmenetaDocument31 paginiIntroducción A La Estadística: Distribución Normal y Distribución Normal Estandarizada - Ana Rebeca UrmenetaAna UrmenetaÎncă nu există evaluări
- Lab 1 Informe NucleosDocument15 paginiLab 1 Informe NucleosNicolas Lozada CaviedesÎncă nu există evaluări
- GUIA Dibujo Constructivo IDocument91 paginiGUIA Dibujo Constructivo Imalula2010Încă nu există evaluări
- Qué Es y para Que Sirve Una DerivadaDocument23 paginiQué Es y para Que Sirve Una DerivadaMario QuiraÎncă nu există evaluări
- Patrón de Afloramiento en CapasDocument46 paginiPatrón de Afloramiento en CapasWendy MedinaÎncă nu există evaluări
- La LineaDocument3 paginiLa LineaOscar CedÎncă nu există evaluări
- Funciones Vectoriales de Variable RealDocument47 paginiFunciones Vectoriales de Variable RealAnonymous zk3azW8Încă nu există evaluări
- Cep Muestreo para AceptacionDocument61 paginiCep Muestreo para AceptacionEzequielAlbanesÎncă nu există evaluări
- Sesión de Aprendizaje 05-UiDocument13 paginiSesión de Aprendizaje 05-UiAngel BuubuÎncă nu există evaluări
- Herramienta Selección FlashDocument2 paginiHerramienta Selección FlashJose Daniel Marin Mazo100% (1)
- Preguntas de Calculo VectorialDocument5 paginiPreguntas de Calculo VectorialCARLOS ALFONSO GOMEZ GARCIAÎncă nu există evaluări
- Glosario - Terminos - VialesDocument59 paginiGlosario - Terminos - VialesMarcos Yana SalcedoÎncă nu există evaluări
- Cuantas Clases de Derivación ExisteDocument4 paginiCuantas Clases de Derivación ExisteDarksiderÎncă nu există evaluări
- 1er Examen Parcial Geometría E. y TrigonometríaDocument3 pagini1er Examen Parcial Geometría E. y TrigonometríaCarlos BotelloÎncă nu există evaluări
- Curvas ParamétricasDocument4 paginiCurvas ParamétricasJuan Castro FrancoÎncă nu există evaluări
- Nivelación Geométrica CompuestaDocument15 paginiNivelación Geométrica CompuestaJimmy Julian Robles Vergara100% (1)
- Informe Tecnico Cuenca CorregidoDocument52 paginiInforme Tecnico Cuenca CorregidoJavier Vasquez Silva0% (1)
- 2 Segunda Tarea Cálculo Diferencial Unitec 19-2Document2 pagini2 Segunda Tarea Cálculo Diferencial Unitec 19-2Raquel Gomez CoronaÎncă nu există evaluări
- Curva MasaDocument3 paginiCurva MasaLuis Marcos100% (1)