S-ar putea să vă placă și
- Factoring and Algebra - A Selection of Classic Mathematical Articles Containing Examples and Exercises on the Subject of Algebra (Mathematics Series)De la EverandFactoring and Algebra - A Selection of Classic Mathematical Articles Containing Examples and Exercises on the Subject of Algebra (Mathematics Series)Încă nu există evaluări
- Solving Polynomial EquationsDocument11 paginiSolving Polynomial Equationsashishsingh007Încă nu există evaluări
- Factoring A PolynomialDocument5 paginiFactoring A PolynomialJessica Liu100% (1)
- Winter HW 2015 Math HL G12Document9 paginiWinter HW 2015 Math HL G12MishaZetov100% (1)
- Basic Properties: Umber HeoryDocument11 paginiBasic Properties: Umber HeorySomesh AwasthiÎncă nu există evaluări
- Lecture 9 Introduction To Difference EquationsDocument55 paginiLecture 9 Introduction To Difference EquationsMeselu TegenieÎncă nu există evaluări
- AP Calculus Cheat SheetDocument2 paginiAP Calculus Cheat Sheet3d5w2dÎncă nu există evaluări
- Multiplicative FunctionsDocument17 paginiMultiplicative FunctionsRose Eden AbitongÎncă nu există evaluări
- 6-5 Solving Polynomial EquationsDocument2 pagini6-5 Solving Polynomial Equationsashley_fago4277Încă nu există evaluări
- Geometry CurriculumDocument5 paginiGeometry CurriculumWendy Millheiser MenardÎncă nu există evaluări
- Factoring-Box MethodDocument1 paginăFactoring-Box Methodmishi19Încă nu există evaluări
- Sta416 3 2Document21 paginiSta416 3 2muhd.ajimmehÎncă nu există evaluări
- Algebra: "Algebraist" Redirects Here. For The Novel by Iain M. Banks, See - For Beginner's Introduction To Algebra, SeeDocument12 paginiAlgebra: "Algebraist" Redirects Here. For The Novel by Iain M. Banks, See - For Beginner's Introduction To Algebra, SeeEduardo DíazÎncă nu există evaluări
- Module in Plane Solid Geo CompleteDocument172 paginiModule in Plane Solid Geo Completelloydie bantigueÎncă nu există evaluări
- 8 4 Function NotationDocument16 pagini8 4 Function Notationapi-233527181Încă nu există evaluări
- 17th 18th 19th and 20th Century MathematicsDocument38 pagini17th 18th 19th and 20th Century MathematicsAPOLONIO SHIRLEYÎncă nu există evaluări
- Pythagorean Theorem PDFDocument136 paginiPythagorean Theorem PDFDianaMae23100% (1)
- The Miquel Points, Pseudocircumcenter, and Euler-Poncelet Point of A Complete Quadrilateral - Michal Rol InekDocument10 paginiThe Miquel Points, Pseudocircumcenter, and Euler-Poncelet Point of A Complete Quadrilateral - Michal Rol InekAltananyÎncă nu există evaluări
- Similar Triangles r1 PDFDocument34 paginiSimilar Triangles r1 PDFjayroe ramosÎncă nu există evaluări
- Counting Methods: Permutations CombinationsDocument31 paginiCounting Methods: Permutations CombinationsMark B. BarrogaÎncă nu există evaluări
- Algebra 101Document548 paginiAlgebra 101Amanda Wright100% (2)
- Advanced Calculus LecturesDocument216 paginiAdvanced Calculus LecturesGabriel Vasconcelos100% (1)
- Calculus and VectorsDocument11 paginiCalculus and VectorsBindo100% (1)
- Mathematical Competitions in The Republic of Kosova in 2019: PRISHTINË, 2019Document36 paginiMathematical Competitions in The Republic of Kosova in 2019: PRISHTINË, 2019Ilir DemiriÎncă nu există evaluări
- Exploring Dilations and ProportionsDocument49 paginiExploring Dilations and ProportionseclecticOTAÎncă nu există evaluări
- Angry Birds Lesson PlanDocument18 paginiAngry Birds Lesson Planharri740Încă nu există evaluări
- Trigonometry (From: Applications of Trigonometry in Real LifeDocument6 paginiTrigonometry (From: Applications of Trigonometry in Real LifeLavishGulatiÎncă nu există evaluări
- Algebra 2Document40 paginiAlgebra 2Kevin BookerÎncă nu există evaluări
- Euclid's Geometry: 1 Origins of Geometry 2 The Axiomatic MethodDocument8 paginiEuclid's Geometry: 1 Origins of Geometry 2 The Axiomatic MethodFelix PascuaÎncă nu există evaluări
- Fundamental Theorem of Calculus (Solutions)Document3 paginiFundamental Theorem of Calculus (Solutions)KamilleX01Încă nu există evaluări
- Solving Linear Diophantine EquationsDocument5 paginiSolving Linear Diophantine EquationsJiaqi XuÎncă nu există evaluări
- Number SystemsDocument10 paginiNumber SystemsRaymond John Rodriguez VergaraÎncă nu există evaluări
- Solving Leontief IOModel With Trapezoidal Fuzzy Numbers and Gauss-Seidel AlgorithmDocument78 paginiSolving Leontief IOModel With Trapezoidal Fuzzy Numbers and Gauss-Seidel AlgorithmHannah Mae Mayol - EntrolizoÎncă nu există evaluări
- Implicit DifferentiationDocument37 paginiImplicit Differentiationapi-320551862100% (1)
- FLOORCEILINGDocument10 paginiFLOORCEILINGMian Usama AhmedÎncă nu există evaluări
- Area of TrianglesDocument7 paginiArea of TrianglesAngelica MontezonÎncă nu există evaluări
- Vieta's Formula - Brilliant Math & Science WikiDocument9 paginiVieta's Formula - Brilliant Math & Science Wikiasax57Încă nu există evaluări
- Fibonacci WorksheetDocument1 paginăFibonacci Worksheet2820reshmaÎncă nu există evaluări
- Set-A Test Series: JEE Main Full Test - 4 Hints & Solutions MathematicsDocument19 paginiSet-A Test Series: JEE Main Full Test - 4 Hints & Solutions MathematicsMohammed Aftab AhmedÎncă nu există evaluări
- Math 55 PDFDocument2 paginiMath 55 PDFGem Dela CruzÎncă nu există evaluări
- MAth Olympiad QPDocument2 paginiMAth Olympiad QPayu7kajiÎncă nu există evaluări
- Systems of Linear Equations and MatricesDocument49 paginiSystems of Linear Equations and Matricesgosaye desalegnÎncă nu există evaluări
- A Collection of ProblemsDocument2 paginiA Collection of ProblemsNadiaÎncă nu există evaluări
- AMC 10 Chapter 1 Algebra Sequence and Equation OverviewDocument25 paginiAMC 10 Chapter 1 Algebra Sequence and Equation OverviewXuemei zhangÎncă nu există evaluări
- Russia All Russian Olympiad 2011 61Document5 paginiRussia All Russian Olympiad 2011 61Biswarup BurmanÎncă nu există evaluări
- Mathematical Guide to Quadric SurfacesDocument2 paginiMathematical Guide to Quadric SurfacesCarlo Tac-anÎncă nu există evaluări
- Service Tower Problem - Solutions: Adapted From Module 2: Worksheet 6 in Precalculus: Pathways To CalculusDocument5 paginiService Tower Problem - Solutions: Adapted From Module 2: Worksheet 6 in Precalculus: Pathways To Calculusapi-287216602100% (1)
- Trinity Math Team Advisor: Mr. Dane Isenberg ProblemsDocument12 paginiTrinity Math Team Advisor: Mr. Dane Isenberg ProblemsProgram Development DepartmentÎncă nu există evaluări
- Olympiad Books Ambitious ListDocument7 paginiOlympiad Books Ambitious ListJosé ParadaÎncă nu există evaluări
- MAT111-18 MExam Answer KeyDocument4 paginiMAT111-18 MExam Answer Keyefren6716Încă nu există evaluări
- Graph Theory Soln PDFDocument10 paginiGraph Theory Soln PDFANDRE LIM BU YUN Year14Încă nu există evaluări
- Statistics Question BankDocument31 paginiStatistics Question BankJulianna Alysha100% (1)
- Math EE IBDocument13 paginiMath EE IBCalc girl ReddingtonÎncă nu există evaluări
- Design Topic: Math Subject(s) : Geometry Grade(s) : 4 Designer(s) : Sarah ZajacDocument16 paginiDesign Topic: Math Subject(s) : Geometry Grade(s) : 4 Designer(s) : Sarah Zajacapi-393056921Încă nu există evaluări
- BINOMIAL SeriesDocument25 paginiBINOMIAL SeriesBench AminÎncă nu există evaluări
- Graphing Polynomials WorksheetDocument2 paginiGraphing Polynomials WorksheetAria JonesÎncă nu există evaluări
- Mathematics Unit PlannerDocument9 paginiMathematics Unit Plannerapi-284842151Încă nu există evaluări
- Inverse Trigonometric Functions (Trigonometry) Mathematics Question BankDe la EverandInverse Trigonometric Functions (Trigonometry) Mathematics Question BankÎncă nu există evaluări
- 05 - C-Purlin DesignDocument1 pagină05 - C-Purlin DesignJoseph Cloyd L. LamberteÎncă nu există evaluări
- Table of ContentsDocument2 paginiTable of ContentsJoseph Cloyd L. LamberteÎncă nu există evaluări
- Additional Handouts ScaffoldingDocument58 paginiAdditional Handouts ScaffoldingJoseph Cloyd L. Lamberte67% (3)
- Katalog Techniczny ENG PDFDocument136 paginiKatalog Techniczny ENG PDFJoseph Cloyd L. LamberteÎncă nu există evaluări
- unionGalvasteelPUpanelInstallationManual 20140704Document7 paginiunionGalvasteelPUpanelInstallationManual 20140704Joseph Cloyd L. LamberteÎncă nu există evaluări
- Sika RaintiteDocument5 paginiSika RaintiteJoseph Cloyd L. LamberteÎncă nu există evaluări
- 11 - Chapter 3 PDFDocument28 pagini11 - Chapter 3 PDFRainielÎncă nu există evaluări
- Staadfooting Design ResultDocument157 paginiStaadfooting Design ResultJoseph Cloyd L. LamberteÎncă nu există evaluări
- Terms of Reference For Civil EngineerDocument4 paginiTerms of Reference For Civil EngineerJoseph Cloyd L. LamberteÎncă nu există evaluări
- Footing Design Result-RcdcDocument360 paginiFooting Design Result-RcdcJoseph Cloyd L. LamberteÎncă nu există evaluări
- Handbook of Construction Estimate by Velasco PDFDocument74 paginiHandbook of Construction Estimate by Velasco PDFJoseph Cloyd L. Lamberte75% (4)
- Standards and Tolerances GuideDocument74 paginiStandards and Tolerances GuideJoseph Cloyd L. LamberteÎncă nu există evaluări
- Stair DesignDocument1 paginăStair DesignJoseph Cloyd L. LamberteÎncă nu există evaluări
- Electrical Model2Document1 paginăElectrical Model2Joseph Cloyd L. LamberteÎncă nu există evaluări
- Rear ElevationDocument1 paginăRear ElevationJoseph Cloyd L. LamberteÎncă nu există evaluări
- NCAE Type Exam - 2010-2011Document3 paginiNCAE Type Exam - 2010-2011Joseph Cloyd L. Lamberte69% (16)
- Front ElevationDocument1 paginăFront ElevationJoseph Cloyd L. LamberteÎncă nu există evaluări
- Slab Design Parameters and Steel RequirementsDocument1 paginăSlab Design Parameters and Steel RequirementsJoseph Cloyd L. LamberteÎncă nu există evaluări
- Test Report Revised - IR - 5-25-08Document37 paginiTest Report Revised - IR - 5-25-08Joseph Cloyd L. LamberteÎncă nu există evaluări
- Typicaltruss Design ResultDocument6 paginiTypicaltruss Design ResultJoseph Cloyd L. LamberteÎncă nu există evaluări
- C-Purlin DesignDocument1 paginăC-Purlin DesignJoseph Cloyd L. LamberteÎncă nu există evaluări
- 04 - Arki02Document1 pagină04 - Arki02Joseph Cloyd L. LamberteÎncă nu există evaluări
- Structural Analysis and Design CriteriaDocument4 paginiStructural Analysis and Design CriteriaJoseph Cloyd L. Lamberte78% (9)
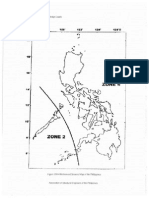
- 05 - Seismic Map of The Philippines PDFDocument1 pagină05 - Seismic Map of The Philippines PDFJoseph Cloyd L. LamberteÎncă nu există evaluări
- Construction NotesDocument4 paginiConstruction NotesJoseph Cloyd L. LamberteÎncă nu există evaluări
- House Bill N0.2200 PDFDocument5 paginiHouse Bill N0.2200 PDFJoseph Cloyd L. LamberteÎncă nu există evaluări
- Plate Load Test Determines 154kPa Soil Bearing CapacityDocument5 paginiPlate Load Test Determines 154kPa Soil Bearing CapacityJoseph Cloyd L. LamberteÎncă nu există evaluări
- Moodle Seminar WorkshopDocument2 paginiMoodle Seminar WorkshopJoseph Cloyd L. LamberteÎncă nu există evaluări
- Reinforced Concrete Structure Design PDFDocument153 paginiReinforced Concrete Structure Design PDFJoseph Cloyd L. Lamberte100% (1)
- Numerical Methods Root FindingDocument61 paginiNumerical Methods Root FindingHarshithaÎncă nu există evaluări
- Levinson and Durbin AlgorithmDocument4 paginiLevinson and Durbin AlgorithmPrathmesh P SakhadeoÎncă nu există evaluări
- Metode NevilleDocument3 paginiMetode NevilleIir MnemonisÎncă nu există evaluări
- Chapter Four - Solutions of A System of Linear EquationsDocument62 paginiChapter Four - Solutions of A System of Linear EquationsAdem Terna SamuelÎncă nu există evaluări
- ICT AssignmentDocument11 paginiICT Assignmentsolyana tesfayeÎncă nu există evaluări
- Potential Difficulties When Applying The GaussDocument3 paginiPotential Difficulties When Applying The GaussOthman BouazizÎncă nu există evaluări
- Linear Programming Is A Mathematical Method For Optimizing Operations Given RestrictionsDocument10 paginiLinear Programming Is A Mathematical Method For Optimizing Operations Given RestrictionsJyoti SahuÎncă nu există evaluări
- Holistic Numerical MethodsDocument6 paginiHolistic Numerical MethodsOhol Rohan BhaskarÎncă nu există evaluări
- Math373CO2016 2017Document2 paginiMath373CO2016 2017Asad AbubakerÎncă nu există evaluări
- Jacobi Method Linear SystemsDocument49 paginiJacobi Method Linear Systemsluis diazÎncă nu există evaluări
- Finite Difference Methods for Solving PDEsDocument45 paginiFinite Difference Methods for Solving PDEsKUKUÎncă nu există evaluări
- Optimisation Techniques Syllabus BIT Mesra PDFDocument1 paginăOptimisation Techniques Syllabus BIT Mesra PDFAnkitÎncă nu există evaluări
- Polynomials Chapter (POLY-1Document30 paginiPolynomials Chapter (POLY-1SATHIASEELAN SIVANANDAM, AdvocateÎncă nu există evaluări
- Finite Difference and Interpolation PDFDocument29 paginiFinite Difference and Interpolation PDFanupamÎncă nu există evaluări
- De Novo Programming: Ha Thi Xuan Chi, PHDDocument21 paginiDe Novo Programming: Ha Thi Xuan Chi, PHDhusterÎncă nu există evaluări
- Bisection root findingDocument31 paginiBisection root findingRaul DiasÎncă nu există evaluări
- MTL107 Set 3Document9 paginiMTL107 Set 3Ethan HuntÎncă nu există evaluări
- Roots of EquationsDocument13 paginiRoots of EquationsFrancis Morales AlmiaÎncă nu există evaluări
- Activity 1 Which Is WhichDocument1 paginăActivity 1 Which Is WhichRhanna Lei SiaÎncă nu există evaluări
- Digital Logic Design - Sequential CircuitsDocument37 paginiDigital Logic Design - Sequential Circuitsvopoc21212Încă nu există evaluări
- GTU Numerical and Statistical Methods CourseDocument3 paginiGTU Numerical and Statistical Methods CourseavÎncă nu există evaluări
- Solving Polynomial Equations: Lesson 3Document36 paginiSolving Polynomial Equations: Lesson 3Selene NyxÎncă nu există evaluări
- CFD Question Bank for Computational Fluid DynamicsDocument2 paginiCFD Question Bank for Computational Fluid DynamicsGurunath AeroÎncă nu există evaluări
- JAVA ADVANCE - Code Smell - Change Preventers v2Document19 paginiJAVA ADVANCE - Code Smell - Change Preventers v2Fatin FuroidaÎncă nu există evaluări
- Chapter 4: Unconstrained OptimizationDocument25 paginiChapter 4: Unconstrained OptimizationcucrasÎncă nu există evaluări
- Chap 11 - Special Matrices and Gauss-SeidelDocument8 paginiChap 11 - Special Matrices and Gauss-SeidelGil DulonÎncă nu există evaluări
- Notebook OR 2015Document74 paginiNotebook OR 2015DonitaÎncă nu există evaluări
- Course Folder: Am 3206 / CSM 324: Operations ResearchDocument3 paginiCourse Folder: Am 3206 / CSM 324: Operations ResearchpratikÎncă nu există evaluări
- Matlab Code For Implementation of Routhharwitz Table TableDocument5 paginiMatlab Code For Implementation of Routhharwitz Table TableEngr. Naveed Mazhar50% (2)
- COEB223 Numec Assignment 1Document5 paginiCOEB223 Numec Assignment 1Ananthan RameshÎncă nu există evaluări