S-ar putea să vă placă și
- TOPIC4 - Part 1 - External HW InterruptDocument28 paginiTOPIC4 - Part 1 - External HW InterruptSharifah SyazwaniÎncă nu există evaluări
- Programming External Hardware InterruptsDocument6 paginiProgramming External Hardware InterruptsShari Bin MappiasiÎncă nu există evaluări
- Eeeb371 Pic Exp2newDocument7 paginiEeeb371 Pic Exp2newSalemAbaadÎncă nu există evaluări
- 8051 Interrupts: MC & Es Class 09 - 25 August September 2023Document41 pagini8051 Interrupts: MC & Es Class 09 - 25 August September 2023Vinay Pratap Singh RajawatÎncă nu există evaluări
- The 8051 Microcontroller and Embedded Systems: Interrupts Programming in AssemblyDocument26 paginiThe 8051 Microcontroller and Embedded Systems: Interrupts Programming in AssemblyAnushkaSinhaÎncă nu există evaluări
- Ch13 InterruptDocument41 paginiCh13 InterruptMir4 BritoÎncă nu există evaluări
- Interrupts in 8051: Microprocessor Laboratory EE-337Document11 paginiInterrupts in 8051: Microprocessor Laboratory EE-337Ayandev BarmanÎncă nu există evaluări
- Lab Assignment 2Document26 paginiLab Assignment 2Pandu KÎncă nu există evaluări
- Lab#11 Interrupt Handeling in At89C51: ObjectiveDocument11 paginiLab#11 Interrupt Handeling in At89C51: ObjectiveAkira MannahelÎncă nu există evaluări
- Fundamentals of Microcontroller & Its Application: Unit-IvDocument15 paginiFundamentals of Microcontroller & Its Application: Unit-IvRajan PatelÎncă nu există evaluări
- Chapter 4Document27 paginiChapter 4Saifullah ZabaniÎncă nu există evaluări
- Interrupt Programming With 8051Document36 paginiInterrupt Programming With 8051ABHISHEK DWIVEDI (RA2111043010082)Încă nu există evaluări
- Lect 20 EtDocument10 paginiLect 20 EtmadhavÎncă nu există evaluări
- Lecture 10 - InterruptsDocument19 paginiLecture 10 - InterruptsMichele Oconnor100% (2)
- Counter ProgrammingDocument26 paginiCounter ProgrammingAyan AcharyaÎncă nu există evaluări
- EE390 Notes Qureshi Ch1ToCh11 T201 ByRakadAlwafiDocument23 paginiEE390 Notes Qureshi Ch1ToCh11 T201 ByRakadAlwafiAbdullah AlmohammedaliÎncă nu există evaluări
- Interface 1Document104 paginiInterface 1MohamedYounesÎncă nu există evaluări
- Push Button InterruptDocument6 paginiPush Button Interruptying25082Încă nu există evaluări
- Interrupcions: Processor - I/O Speed MismatchDocument18 paginiInterrupcions: Processor - I/O Speed MismatchRonyVargasÎncă nu există evaluări
- Chapter 5 InterruptsDocument27 paginiChapter 5 Interruptsellyshacb-wp21Încă nu există evaluări
- EE6008 Unit 2Document11 paginiEE6008 Unit 2TakeItEasyDude TIEDÎncă nu există evaluări
- ESD NPTEL SummaryDocument47 paginiESD NPTEL SummaryrahulpikaleÎncă nu există evaluări
- Unit 5Document9 paginiUnit 5Suresh MeesalaÎncă nu există evaluări
- Xddsafcdsvfgsadgvbzfshfscxvbxbvxzsdsafgdshgfvnbvnvnvn B: Descriptio N Alternate FunctionDocument8 paginiXddsafcdsvfgsadgvbzfshfscxvbxbvxzsdsafgdshgfvnbvnvnvn B: Descriptio N Alternate FunctionnareshhhhhÎncă nu există evaluări
- XC VNVCN Vcnxdcvnxbcfhbxddsafcdsvfgsadgvbzfshfscxvbxbvxzsdsafgdshgf VNBVNVNVNBDocument8 paginiXC VNVCN Vcnxdcvnxbcfhbxddsafcdsvfgsadgvbzfshfscxvbxbvxzsdsafgdshgf VNBVNVNVNBnareshhhhhÎncă nu există evaluări
- Embedded Systems - Lec 4 - InterruptsDocument29 paginiEmbedded Systems - Lec 4 - InterruptsIslam Abd ElhadlyÎncă nu există evaluări
- EEM336 mt2 Example QuestionsDocument20 paginiEEM336 mt2 Example QuestionsMustafa TuraçÎncă nu există evaluări
- PIC16F877 Microcontroller ON-Chip PeripheralsDocument31 paginiPIC16F877 Microcontroller ON-Chip Peripheralsmd mamnunÎncă nu există evaluări
- Description Alternate FunctionDocument8 paginiDescription Alternate FunctionnareshhhhhÎncă nu există evaluări
- Description Alternate Function: SFDFDGFBGFDocument8 paginiDescription Alternate Function: SFDFDGFBGFnareshhhhhÎncă nu există evaluări
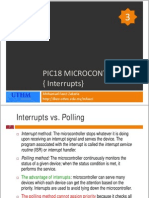
- U3 PIC 18F Microcontroller InterruptsDocument59 paginiU3 PIC 18F Microcontroller Interruptsmadhukar v nimbalkarÎncă nu există evaluări
- VCV CXB CCNBFVBFCGXC VNVCN Vcnxdcvnxbcfhbxddsafcdsvfgsadgvbzfshfscxvbxbvxzsdsafgdshgf VNBVNVNVNBDocument8 paginiVCV CXB CCNBFVBFCGXC VNVCN Vcnxdcvnxbcfhbxddsafcdsvfgsadgvbzfshfscxvbxbvxzsdsafgdshgf VNBVNVNVNBnareshhhhhÎncă nu există evaluări
- Lec6 8051 InterruptsDocument12 paginiLec6 8051 InterruptsOdoch HerbertÎncă nu există evaluări
- Unit 4 InterruptDocument33 paginiUnit 4 InterruptDarvis IdhamÎncă nu există evaluări
- CSDVCXVFDXGBVFDGFDFSDFGFDGFCGGCF Gjhghfgjjmgxjgdjpin No. Pin Name Description Alternate FunctionDocument8 paginiCSDVCXVFDXGBVFDGFDFSDFGFDGFCGGCF Gjhghfgjjmgxjgdjpin No. Pin Name Description Alternate FunctionnareshhhhhÎncă nu există evaluări
- 6.interrupts 1Document34 pagini6.interrupts 1Dr-Samson ChepuriÎncă nu există evaluări
- Sdsafgdshgfvnbvnvnvnb: Description Alternate FunctionDocument8 paginiSdsafgdshgfvnbvnvnvnb: Description Alternate FunctionnareshhhhhÎncă nu există evaluări
- Chapter 11 - INTERRUPTDocument43 paginiChapter 11 - INTERRUPTPhương NguyễnÎncă nu există evaluări
- MP MC Unit IVDocument26 paginiMP MC Unit IVS D NagulanÎncă nu există evaluări
- Ee3954 Fall13 08 InterruptsDocument44 paginiEe3954 Fall13 08 InterruptsHeart StopperÎncă nu există evaluări
- 7 InterruptsDocument31 pagini7 InterruptsMahnoor SalmanÎncă nu există evaluări
- Pic18 InterruptDocument14 paginiPic18 Interruptadamwaiz100% (4)
- Interrupt Expanding HW Interrupt: Presented By: Dr. Syed Aqeel HaiderDocument22 paginiInterrupt Expanding HW Interrupt: Presented By: Dr. Syed Aqeel HaiderAlya CookÎncă nu există evaluări
- Subroutines: Nithin S. EEE DeptDocument33 paginiSubroutines: Nithin S. EEE DeptabcdefgÎncă nu există evaluări
- ESD NPTEL SummaryDocument35 paginiESD NPTEL SummaryrahulpikaleÎncă nu există evaluări
- PIC16F628Document30 paginiPIC16F628Prince YehyaÎncă nu există evaluări
- Basic Computer OrganizationDocument9 paginiBasic Computer OrganizationAnish KumarÎncă nu există evaluări
- Interrupt ProgrammingDocument9 paginiInterrupt ProgrammingKavya ShreeÎncă nu există evaluări
- Complete Manual Updated-MergedDocument59 paginiComplete Manual Updated-MergedTayyaba AsifÎncă nu există evaluări
- Chapter 11 InterruptsDocument29 paginiChapter 11 InterruptsAnkit Kumar50% (2)
- ExternalInterrupt PPTDocument28 paginiExternalInterrupt PPTsharadaÎncă nu există evaluări
- 89S52Basics7 INTERRUPTSDocument13 pagini89S52Basics7 INTERRUPTSPaulo MarianoÎncă nu există evaluări
- 08 2011 TingDocument18 pagini08 2011 Tingmuhaned190Încă nu există evaluări
- 8051 InterruptDocument48 pagini8051 InterruptIMDAD HUSSAIN MAMUDÎncă nu există evaluări
- Embedded LabDocument121 paginiEmbedded LabJ.B.David StephenÎncă nu există evaluări
- Interrupts 8051Document24 paginiInterrupts 8051Raja MadhuvanthiÎncă nu există evaluări
- Nsfc01 01 Control System 4swDocument10 paginiNsfc01 01 Control System 4swMuhammad SaifudinÎncă nu există evaluări
- CENG-336 Introduction To Embedded Systems DevelopmentDocument50 paginiCENG-336 Introduction To Embedded Systems DevelopmentIngo SÎncă nu există evaluări
- CSDVCXVFDXGBVFDGFDFSDFGFDGFCGGCF Gjhghfgjjmgxjgdjpin No. Pin Name Description Alternate FunctionDocument8 paginiCSDVCXVFDXGBVFDGFDFSDFGFDGFCGGCF Gjhghfgjjmgxjgdjpin No. Pin Name Description Alternate FunctionnareshhhhhÎncă nu există evaluări
- EXPERIMENT 7: Introduction To Universal Serial Asynchronous Receive Transmit (Usart) ObjectiveDocument9 paginiEXPERIMENT 7: Introduction To Universal Serial Asynchronous Receive Transmit (Usart) ObjectiveSalemAbaadÎncă nu există evaluări
- Eeeb371 Pic Exp6newDocument7 paginiEeeb371 Pic Exp6newSalemAbaad100% (2)
- Eeeb371 Pic Exp5newDocument3 paginiEeeb371 Pic Exp5newSalemAbaadÎncă nu există evaluări
- Eeeb371 Pic Exp4newDocument13 paginiEeeb371 Pic Exp4newSalemAbaadÎncă nu există evaluări
- Eeeb371 Pic Exp1newDocument8 paginiEeeb371 Pic Exp1newSalemAbaadÎncă nu există evaluări
- Words of Radiance: Book Two of The Stormlight Archive - Brandon SandersonDocument6 paginiWords of Radiance: Book Two of The Stormlight Archive - Brandon Sandersonxyrytepa0% (3)
- Pediatrics: The Journal ofDocument11 paginiPediatrics: The Journal ofRohini TondaÎncă nu există evaluări
- Img 20150510 0001Document2 paginiImg 20150510 0001api-284663984Încă nu există evaluări
- Universitas Tidar: Fakultas Keguruan Dan Ilmu PendidikanDocument7 paginiUniversitas Tidar: Fakultas Keguruan Dan Ilmu PendidikanTheresia Calcutaa WilÎncă nu există evaluări
- 2Document8 pagini2Eduardo Antonio Comaru Gouveia75% (4)
- Nizkor Project Fallacies - LabossierDocument77 paginiNizkor Project Fallacies - Labossierapi-3766098100% (1)
- Philodendron Plants CareDocument4 paginiPhilodendron Plants CareSabre FortÎncă nu există evaluări
- CII Sohrabji Godrej GreenDocument30 paginiCII Sohrabji Godrej GreenRITHANYAA100% (2)
- Borges, The SouthDocument4 paginiBorges, The Southdanielg233100% (1)
- DirectionDocument1 paginăDirectionJessica BacaniÎncă nu există evaluări
- SCERT Kerala State Syllabus 9th Standard English Textbooks Part 1-1Document104 paginiSCERT Kerala State Syllabus 9th Standard English Textbooks Part 1-1Athulya ThondangattilÎncă nu există evaluări
- A Literature Review of Retailing Sector and BusineDocument21 paginiA Literature Review of Retailing Sector and BusineSid MichaelÎncă nu există evaluări
- 9400 Series - Catalogue - AccessoriesDocument86 pagini9400 Series - Catalogue - AccessoriesSaulo Leonardo Fabelo FontesÎncă nu există evaluări
- Math F112Document3 paginiMath F112ritik12041998Încă nu există evaluări
- Nantai Catalog NewDocument30 paginiNantai Catalog Newspalomos100% (1)
- Tutorial Chapter 5 - Power System ControlDocument2 paginiTutorial Chapter 5 - Power System ControlsahibÎncă nu există evaluări
- Detail Design Drawings: OCTOBER., 2017 Date Span Carriage WayDocument26 paginiDetail Design Drawings: OCTOBER., 2017 Date Span Carriage WayManvendra NigamÎncă nu există evaluări
- RARE Manual For Training Local Nature GuidesDocument91 paginiRARE Manual For Training Local Nature GuidesenoshaugustineÎncă nu există evaluări
- Precursor Effects of Citric Acid and Citrates On Zno Crystal FormationDocument7 paginiPrecursor Effects of Citric Acid and Citrates On Zno Crystal FormationAlv R GraciaÎncă nu există evaluări
- De Thi Hoc Ki 1 Lop 11 Mon Tieng Anh Co File Nghe Nam 2020Document11 paginiDe Thi Hoc Ki 1 Lop 11 Mon Tieng Anh Co File Nghe Nam 2020HiềnÎncă nu există evaluări
- Tuma Research ManualDocument57 paginiTuma Research ManualKashinde Learner Centered Mandari100% (1)
- COK - Training PlanDocument22 paginiCOK - Training PlanralphÎncă nu există evaluări
- Python in Hidrology BookDocument153 paginiPython in Hidrology BookJuan david Gonzalez vasquez100% (1)
- Literature Review Template DownloadDocument4 paginiLiterature Review Template Downloadaflsigfek100% (1)
- Ch-10 Human Eye Notes FinalDocument27 paginiCh-10 Human Eye Notes Finalkilemas494Încă nu există evaluări
- Application of The Strain Energy To Estimate The Rock Load in Non-Squeezing Ground ConditionDocument17 paginiApplication of The Strain Energy To Estimate The Rock Load in Non-Squeezing Ground ConditionAmit Kumar GautamÎncă nu există evaluări
- Existentialism in CinemaDocument25 paginiExistentialism in CinemanormatthewÎncă nu există evaluări
- Img 20201010 0005Document1 paginăImg 20201010 0005Tarek SalehÎncă nu există evaluări
- CHARACTER FORMATION 1 PrelimDocument15 paginiCHARACTER FORMATION 1 PrelimAiza Minalabag100% (1)
- BBL PR Centralizer Rig Crew Handout (R1.1 2-20-19)Document2 paginiBBL PR Centralizer Rig Crew Handout (R1.1 2-20-19)NinaÎncă nu există evaluări