S-ar putea să vă placă și
- Hobby Servo Motor Control Via PIC Pulse Width Modulation: Nathan Markey April 4, 2003Document7 paginiHobby Servo Motor Control Via PIC Pulse Width Modulation: Nathan Markey April 4, 2003Luciana Gutierrez Salazar100% (1)
- CCP ModuleDocument11 paginiCCP ModuleAltaaf Mulani100% (1)
- LCD HandshakingDocument19 paginiLCD HandshakingNvskinId100% (1)
- PIC PPT 13104022 (4th Year)Document41 paginiPIC PPT 13104022 (4th Year)Daman Deep Singh100% (1)
- HBridgeMotorControl With PICDocument11 paginiHBridgeMotorControl With PICcoceicr100% (3)
- LCD - GDM1602BDocument10 paginiLCD - GDM1602BElanio Julio100% (1)
- Lab11 CountersDocument6 paginiLab11 Countersjocansino4496100% (1)
- An-960 RS 485 Incl Termination DetailsDocument12 paginiAn-960 RS 485 Incl Termination Detailsqafqgibsonq4543100% (1)
- Development Kit For E-Paper Display: Dalian Good Display Co., LTDDocument14 paginiDevelopment Kit For E-Paper Display: Dalian Good Display Co., LTDjhonatan cock100% (1)
- LCD 16x2Document6 paginiLCD 16x2teguh iman100% (2)
- Pic Prog Assembly PDFDocument62 paginiPic Prog Assembly PDFEmilio100% (2)
- Interfacing Example - 16 Character X 2 Line LCD: DescriptionDocument5 paginiInterfacing Example - 16 Character X 2 Line LCD: DescriptionManish Kumar sharma100% (1)
- Distance CounterDocument4 paginiDistance Counterkvamsee112100% (1)
- Agribot Project PresentationDocument21 paginiAgribot Project Presentationumaiya1990100% (1)
- ZadatciDocument22 paginiZadatciTakticar100% (1)
- DS Zadaci PDFDocument23 paginiDS Zadaci PDFArnela Tatic100% (1)
- Book PIC Microcontrollers-Chapter 5 CCP ModulesDocument17 paginiBook PIC Microcontrollers-Chapter 5 CCP ModulesHammamiSalah100% (1)
- Octal Configurable Low/High Side Driver: DescriptionDocument18 paginiOctal Configurable Low/High Side Driver: DescriptionDan Esenther100% (1)
- Stepper Motor C CodeDocument4 paginiStepper Motor C CodeJoël Mwabi100% (1)
- DiseqC SCHDocument1 paginăDiseqC SCHnaseerak100% (2)
- USB-to-RS232 Using Atmel ATtiny2313 or ATmega8Document4 paginiUSB-to-RS232 Using Atmel ATtiny2313 or ATmega8mikcomi100% (1)
- High Voltage Power Operational Amplifiers: Features DescriptionDocument6 paginiHigh Voltage Power Operational Amplifiers: Features DescriptionWaqas Ayub100% (1)
- User Guide For TM1637 4 Digits DisplayDocument4 paginiUser Guide For TM1637 4 Digits Displaymikcomi100% (1)
- Propeller Clock at Mega 32Document1 paginăPropeller Clock at Mega 32diego140bpm100% (2)
- Overview of The Inter-Integrated Circuit (I C) Bus: 2 ECPE 4536 Microprocessor System Design II Virginia TechDocument7 paginiOverview of The Inter-Integrated Circuit (I C) Bus: 2 ECPE 4536 Microprocessor System Design II Virginia Techdineshvhaval100% (1)
- ICD2 Poster 51265hDocument1 paginăICD2 Poster 51265hngt881100% (1)
- AVR Hardware Design ConsiderationsDocument14 paginiAVR Hardware Design ConsiderationsAmarnath M Damodaran100% (1)
- PWM Using Ic555Document1 paginăPWM Using Ic555Sachin Arora100% (1)
- 8086 PPTDocument30 pagini8086 PPTKavitha Subramaniam100% (1)
- CCP PWMDocument19 paginiCCP PWMalaa_saq100% (1)
- Rc2004a Biw EsxDocument22 paginiRc2004a Biw EsxMarin Baiasu100% (1)
- Pic Usb - v2Document23 paginiPic Usb - v2Andres Echeverry100% (1)
- An1388 Pic32 BootloaderDocument16 paginiAn1388 Pic32 Bootloadercroud_freak100% (1)
- Motor StepperDocument4 paginiMotor Stepperfavour ukpai100% (1)
- Sg8V1 Programing Schematic: IC Design Research & Education CenterDocument1 paginăSg8V1 Programing Schematic: IC Design Research & Education CenterKit Vi Điều Khiển100% (1)
- 16Fxxx With ICSPDocument3 pagini16Fxxx With ICSPAlonso Corado100% (2)
- In-Circuit Serial Programming - Picmicro Mid-Range Mcu Family PDFDocument14 paginiIn-Circuit Serial Programming - Picmicro Mid-Range Mcu Family PDFMauro Vargas100% (2)
- W6100-Evb SCH V110 PDFDocument3 paginiW6100-Evb SCH V110 PDFYuriy100% (2)
- Brushless DC Electric Motor Control by CPLDDocument6 paginiBrushless DC Electric Motor Control by CPLDIonela100% (3)
- Using The TWI Module As I2C MasterDocument11 paginiUsing The TWI Module As I2C Mastermithrandair100% (1)
- Nec Ir For PicDocument14 paginiNec Ir For Picsudhakar5472100% (1)
- By Marl Us: Lighting The Right To TheDocument7 paginiBy Marl Us: Lighting The Right To TheGiancarloRichardRivadeneyraMiranda100% (1)
- Bascom and AVR, RS-232Document10 paginiBascom and AVR, RS-232akbar100% (1)
- Spi and I2cDocument11 paginiSpi and I2cAbhay Tomar100% (1)
- 6 SpiDocument36 pagini6 SpiMalik Adil Farooq50% (2)
- Testing Pic Code For I2C Master - Slave CommunicationDocument15 paginiTesting Pic Code For I2C Master - Slave CommunicationJavier Corimaya33% (3)
- DC Motor Control Using CDocument6 paginiDC Motor Control Using Cankitguptaims100% (2)
- Design Ideas: Keyboard CircuitDocument2 paginiDesign Ideas: Keyboard CircuitTariq Zuhluf100% (3)
- PicsimLab Board2Document1 paginăPicsimLab Board2Daniel Cafu100% (2)
- USB Programátor Pro Atmel: +5V Vccint 1k 1k +5V +5V JP2 R2 R3Document1 paginăUSB Programátor Pro Atmel: +5V Vccint 1k 1k +5V +5V JP2 R2 R3Nacer Mezghiche100% (1)
- Contador Frecuencia 1-50Document4 paginiContador Frecuencia 1-50jose100% (2)
- FPP3Document1 paginăFPP3uzunku100% (1)
- Pic-Web Development Board Users Manual: Rev.A, July 2008Document14 paginiPic-Web Development Board Users Manual: Rev.A, July 2008darazzi100% (1)
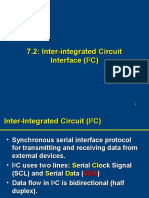
- Section 7.2 - I2CNewMarch27Document32 paginiSection 7.2 - I2CNewMarch27Andy Wo100% (1)
- Capacitor Meter AutoRanging OLED 128x32 KTW Updated Code 05feb2021Document2 paginiCapacitor Meter AutoRanging OLED 128x32 KTW Updated Code 05feb20214NM20EE085 VISHWAKEERTHI BHAT M100% (1)
- Stepper Motor TutorialDocument6 paginiStepper Motor TutorialengrodeÎncă nu există evaluări
- Stepper Motor - Parallel Port Interface by Jose Rene Flores and Jaime ZavalaDocument18 paginiStepper Motor - Parallel Port Interface by Jose Rene Flores and Jaime ZavalaMufasa SiddiquiÎncă nu există evaluări
- Electronics Projects Farhan ShakeelDocument236 paginiElectronics Projects Farhan Shakeelfarhanshakeel100% (2)
- Tip23 e PDFDocument4 paginiTip23 e PDFThanh BaronÎncă nu există evaluări
- Lab 2Document12 paginiLab 2Malik YousafÎncă nu există evaluări
- EXPERIMENT 7: Introduction To Universal Serial Asynchronous Receive Transmit (Usart) ObjectiveDocument9 paginiEXPERIMENT 7: Introduction To Universal Serial Asynchronous Receive Transmit (Usart) ObjectiveSalemAbaadÎncă nu există evaluări
- Eeeb371 Pic Exp4newDocument13 paginiEeeb371 Pic Exp4newSalemAbaadÎncă nu există evaluări
- Eeeb371 Pic Exp5newDocument3 paginiEeeb371 Pic Exp5newSalemAbaadÎncă nu există evaluări
- EXPERIMENT 3: The Interrupt and Polling System.: EEEB371 E3 1Document4 paginiEXPERIMENT 3: The Interrupt and Polling System.: EEEB371 E3 1SalemAbaadÎncă nu există evaluări
- Eeeb371 Pic Exp2newDocument7 paginiEeeb371 Pic Exp2newSalemAbaadÎncă nu există evaluări
- Eeeb371 Pic Exp1newDocument8 paginiEeeb371 Pic Exp1newSalemAbaadÎncă nu există evaluări
- Malay SongDocument1 paginăMalay SongSalemAbaadÎncă nu există evaluări
- KB101 Technical Data SheetDocument3 paginiKB101 Technical Data Sheetpaul4292Încă nu există evaluări
- Modul Bahasa Inggris 2 - Unit 6 - Rev 2019Document16 paginiModul Bahasa Inggris 2 - Unit 6 - Rev 2019Dhana ChompÎncă nu există evaluări
- DP Sounds Realtek 15042 DriversDocument1.747 paginiDP Sounds Realtek 15042 DriversJuan Carlos Gonzalez LÎncă nu există evaluări
- NintendoDocument8 paginiNintendoRaymond HuiÎncă nu există evaluări
- Electronic TextilesDocument13 paginiElectronic TextilesDr-Eng Amir Elsafrawey100% (1)
- Leaflet b45.2x (Antenna Trainer)Document9 paginiLeaflet b45.2x (Antenna Trainer)Mushtaq AhmadÎncă nu există evaluări
- G4000Document24 paginiG4000AbuAhmedQuaziÎncă nu există evaluări
- BMW F20 Video Interface User ManualDocument20 paginiBMW F20 Video Interface User ManualPham Cao ThanhÎncă nu există evaluări
- CD4011BCDocument10 paginiCD4011BCKike DavilaÎncă nu există evaluări
- Manuals FX ExpertDocument9 paginiManuals FX ExpertAsep SaepudinÎncă nu există evaluări
- Performance Comparison of Scalable Rest Application Programming Interfaces in Different PlatformsDocument30 paginiPerformance Comparison of Scalable Rest Application Programming Interfaces in Different PlatformsGolang InsightsÎncă nu există evaluări
- Cuaderno Curso - CAT I Activity Book Spanish With CoverDocument34 paginiCuaderno Curso - CAT I Activity Book Spanish With CoverJose Raul Reyes Dominguez100% (1)
- Pve Admin Guide PDFDocument350 paginiPve Admin Guide PDFEthewaldo FerreiraÎncă nu există evaluări
- Universe BasicDocument1.364 paginiUniverse BasicJoseph RiccardoÎncă nu există evaluări
- ABB Offline Order Number Tool Ver. 15.42a 758059 ENhDocument77 paginiABB Offline Order Number Tool Ver. 15.42a 758059 ENhSumith VkÎncă nu există evaluări
- Ellis Patents Trade Pricelist 2011Document33 paginiEllis Patents Trade Pricelist 2011nicesreekanthÎncă nu există evaluări
- 74F151 ApcDocument7 pagini74F151 ApcraduÎncă nu există evaluări
- Ml7984a4009 HoneywellDocument40 paginiMl7984a4009 HoneywellFrancisco Javier BurgosÎncă nu există evaluări
- Syllabus BCS302 COMPUTER ORGANIZATION AND ARCHITECTUREDocument1 paginăSyllabus BCS302 COMPUTER ORGANIZATION AND ARCHITECTUREMr. Manoj Kr. Sharma EceÎncă nu există evaluări
- Programming Fundamentals: Lecture # 1Document42 paginiProgramming Fundamentals: Lecture # 1EAGLE SquadÎncă nu există evaluări
- CH-6 8086 Microprocessor InterfacingDocument8 paginiCH-6 8086 Microprocessor InterfacingAnikhet MulkyÎncă nu există evaluări
- Basler UFOV Product BulletinDocument4 paginiBasler UFOV Product BulletinFrancisco Ronaldo Franco100% (1)
- Eva 525Document2 paginiEva 525diazdavidh100% (1)
- CIS Controls IoT Companion GuideDocument67 paginiCIS Controls IoT Companion GuideRahmat PurwokoÎncă nu există evaluări
- Resolving Archive Gap Between PrimaryDocument18 paginiResolving Archive Gap Between Primaryyakubpasha.mohdÎncă nu există evaluări
- Korg Trinity Manual - Expansion Option - PBS-TRI PDFDocument19 paginiKorg Trinity Manual - Expansion Option - PBS-TRI PDFCaroozoÎncă nu există evaluări
- Experiment No. 7 Interfacing Keys, Keypad To MicrocontrollerDocument8 paginiExperiment No. 7 Interfacing Keys, Keypad To MicrocontrollerRht BrdÎncă nu există evaluări
- DPX 250 Thermal Magnetic and Trip-Free Switches DPX - I 250: 87045 LIMOGES CedexDocument9 paginiDPX 250 Thermal Magnetic and Trip-Free Switches DPX - I 250: 87045 LIMOGES CedexEdwin Armando Abella P.Încă nu există evaluări
- Handy Unix Commands For A DBADocument3 paginiHandy Unix Commands For A DBAmdrajivÎncă nu există evaluări
- 33 KV IocgDocument2 pagini33 KV IocgAnshuman PandeyÎncă nu există evaluări