S-ar putea să vă placă și
- Control Systems Question Bank-1Document12 paginiControl Systems Question Bank-1Ikegwuonu CelestineÎncă nu există evaluări
- Anais Do Workshop De Micro-ondasDe la EverandAnais Do Workshop De Micro-ondasÎncă nu există evaluări
- Control System Question Bank WbutDocument13 paginiControl System Question Bank Wbutsubhroaue100% (2)
- IC8451 QB - by WWW - EasyEngineering.net 1Document15 paginiIC8451 QB - by WWW - EasyEngineering.net 1Lokey LokeshÎncă nu există evaluări
- Control Systems EngineeringDocument16 paginiControl Systems Engineeringapi-19951707Încă nu există evaluări
- Fundamentals of Electronics 2: Continuous-time Signals and SystemsDe la EverandFundamentals of Electronics 2: Continuous-time Signals and SystemsÎncă nu există evaluări
- Question Bank: Unit I Systems and Their RepresentationDocument12 paginiQuestion Bank: Unit I Systems and Their Representationrep domÎncă nu există evaluări
- Control Lec 5Document31 paginiControl Lec 5Mhabad ZebariÎncă nu există evaluări
- BlockDiagram and Signal Flow GraphsDocument29 paginiBlockDiagram and Signal Flow GraphsDienies TorresÎncă nu există evaluări
- Chapter 2 - Reduction of Multiple SystemDocument46 paginiChapter 2 - Reduction of Multiple SystemHaqeemee HusseinÎncă nu există evaluări
- 2018 EE305 New SolutionDocument25 pagini2018 EE305 New SolutionJasa R ChoudharyÎncă nu există evaluări
- Linear Control Engineering QBDocument11 paginiLinear Control Engineering QBAkizuki TakaoÎncă nu există evaluări
- 003 ME31002 - Block Diagram-2021febDocument54 pagini003 ME31002 - Block Diagram-2021febShek Yu LaiÎncă nu există evaluări
- Lab ReportDocument23 paginiLab ReportNAFIZ AHMEDÎncă nu există evaluări
- Control System (PT)Document7 paginiControl System (PT)MATHANKUMAR.SÎncă nu există evaluări
- Cat1 2016-17Document2 paginiCat1 2016-17Jasinthaja AsankaÎncă nu există evaluări
- Ks Ss S J S J: No. of Printed Pages: 05 Roll No. ......................Document3 paginiKs Ss S J S J: No. of Printed Pages: 05 Roll No. ......................PNEÎncă nu există evaluări
- LG Embedded Jan09Document5 paginiLG Embedded Jan09Junaid AhmadÎncă nu există evaluări
- Worksheet 1Document3 paginiWorksheet 1million shiferawÎncă nu există evaluări
- Block Diagram Reduction:: Dr. Qasim Abbas Automatic Control I 6Document5 paginiBlock Diagram Reduction:: Dr. Qasim Abbas Automatic Control I 6علي حسين علاوي ثوينيÎncă nu există evaluări
- T2 - Sistem Kendali - F1B021003 - Azwajum MutohharohDocument48 paginiT2 - Sistem Kendali - F1B021003 - Azwajum MutohharohBeni Nungroho sudiantoroÎncă nu există evaluări
- Chapter 4 Block Diagrams of Control SystemsDocument18 paginiChapter 4 Block Diagrams of Control SystemsZeynal Abidin ŞabaşÎncă nu există evaluări
- BEE3143 Assignment S1200910Document7 paginiBEE3143 Assignment S1200910Farhan Juice0% (2)
- Adobe Scan 29 Jan 2024Document25 paginiAdobe Scan 29 Jan 2024Ashlie JaneÎncă nu există evaluări
- II B.Tech VI Semester I Mid Question Bank 2016-17: Malla Reddy Engineering College (Autonomous)Document2 paginiII B.Tech VI Semester I Mid Question Bank 2016-17: Malla Reddy Engineering College (Autonomous)chanduÎncă nu există evaluări
- Stability of Control Systems Important Points: CHC3150 Process Dynamics and ControlDocument10 paginiStability of Control Systems Important Points: CHC3150 Process Dynamics and ControlOseribho ObohÎncă nu există evaluări
- Control SystemDocument21 paginiControl SystemGAkumari0% (1)
- AssigmentDocument4 paginiAssigmentYonatan GizawÎncă nu există evaluări
- IC6501-Control Systems EngineeringDocument16 paginiIC6501-Control Systems EngineeringrameshsmeÎncă nu există evaluări
- Lecture 4Document13 paginiLecture 4Syed Hussain Akbar MosviÎncă nu există evaluări
- IIyr IVsem Controlsystem WWW Matterhere Com NRRDocument28 paginiIIyr IVsem Controlsystem WWW Matterhere Com NRRShubham GahlawatÎncă nu există evaluări
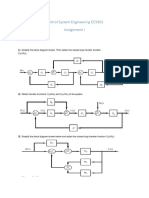
- Control System Engineering EC3301 Assignment I: Practice Following ProblemsDocument2 paginiControl System Engineering EC3301 Assignment I: Practice Following ProblemsAparajita PanigrahiÎncă nu există evaluări
- PPTPRITYDocument27 paginiPPTPRITYPrity kumariÎncă nu există evaluări
- Assignment 1Document2 paginiAssignment 1syedÎncă nu există evaluări
- 21 22Document2 pagini21 22Goura Sundar TripathyÎncă nu există evaluări
- Block Diagram ReductionDocument26 paginiBlock Diagram Reductionmamnd tahaÎncă nu există evaluări
- Activity 9: Control System Design of DC Motor Position Control Using Lead MethodDocument12 paginiActivity 9: Control System Design of DC Motor Position Control Using Lead MethodNathannaell ReibenÎncă nu există evaluări
- Ec6405 IV SemDocument10 paginiEc6405 IV SemKaruppu SamyÎncă nu există evaluări
- Tutorial 1Document2 paginiTutorial 1Bookal RohanÎncă nu există evaluări
- Ec3351 Cse QB 2022Document26 paginiEc3351 Cse QB 2022code 007Încă nu există evaluări
- Gujarat Technological UniversityDocument2 paginiGujarat Technological UniversityHerat HirparaÎncă nu există evaluări
- NEWLab1 Servo2 v5 LabManualDocument9 paginiNEWLab1 Servo2 v5 LabManualkrups1991Încă nu există evaluări
- EC6405-Control Systems EngineeringDocument12 paginiEC6405-Control Systems EngineeringAnonymous XhmybK0% (1)
- Symbols and Circuit DiagramsDocument31 paginiSymbols and Circuit DiagramsSourabh SamantaÎncă nu există evaluări
- EEE3001 Software ManualDocument34 paginiEEE3001 Software ManualManuDubeyÎncă nu există evaluări
- Control System Analysis and Design: Karen WillcoxDocument12 paginiControl System Analysis and Design: Karen Willcoxkhannasir1Încă nu există evaluări
- VL2023240100263 DaDocument2 paginiVL2023240100263 DaRahul GaneshÎncă nu există evaluări
- T2 BlockDiagram SFG Time ResponseDocument9 paginiT2 BlockDiagram SFG Time ResponseRaj PatelÎncă nu există evaluări
- Answer of Homework Chapter 1 20141009Document4 paginiAnswer of Homework Chapter 1 20141009NHÂN ĐẶNG HỮUÎncă nu există evaluări
- M2 (Mechatronics)Document21 paginiM2 (Mechatronics)Sarah J SinfuegoÎncă nu există evaluări
- Kings: Question BankDocument12 paginiKings: Question BankdhayasathishÎncă nu există evaluări
- MSD2Document47 paginiMSD2moeÎncă nu există evaluări
- Introduction To Logic Design Experiments 1 Thru 10Document36 paginiIntroduction To Logic Design Experiments 1 Thru 10George Kokkinias100% (1)
- Transfer Functions From Block Diagrams and Signal Flow ChartDocument10 paginiTransfer Functions From Block Diagrams and Signal Flow ChartYzza Veah EsquivelÎncă nu există evaluări
- Block Diagrams EnotesDocument7 paginiBlock Diagrams Enotespatel_vicky87Încă nu există evaluări
- B - Lecture3 The Transfer Function and Block Diagram Automatic Control SystemDocument21 paginiB - Lecture3 The Transfer Function and Block Diagram Automatic Control SystemAbaziz Mousa OutlawZz100% (1)
- Control SystemsDocument32 paginiControl Systemsselvi0412100% (1)
- Ee6301 4Document2 paginiEe6301 4sunil1237Încă nu există evaluări
- DLC Ee6301Document27 paginiDLC Ee6301sunil1237Încă nu există evaluări
- ME 8792 Power Plant Engineering NOV DEC 18Document2 paginiME 8792 Power Plant Engineering NOV DEC 18sunil1237Încă nu există evaluări
- ME8792Document3 paginiME8792sunil1237Încă nu există evaluări
- Ee6301 4Document2 paginiEe6301 4sunil1237Încă nu există evaluări
- EE8353 Electrical Drives and Control April-May 19Document3 paginiEE8353 Electrical Drives and Control April-May 19sunil1237Încă nu există evaluări
- DLC 3Document1 paginăDLC 3sunil1237Încă nu există evaluări
- FDTP-Self Supporting-Summer 2017Document1 paginăFDTP-Self Supporting-Summer 2017sunil1237Încă nu există evaluări
- Ee6301 4Document2 paginiEe6301 4sunil1237Încă nu există evaluări
- BLDC Pumping System For Renewable ApplicationsDocument7 paginiBLDC Pumping System For Renewable Applicationssunil1237Încă nu există evaluări
- FormsDocument1 paginăFormssunil1237Încă nu există evaluări
- EC6405 Nov Dec 2015 PDFDocument4 paginiEC6405 Nov Dec 2015 PDFsunil1237Încă nu există evaluări
- Stucor Qp-Be8254Document2 paginiStucor Qp-Be8254sunil1237Încă nu există evaluări
- CubDocument6 paginiCubsunil1237Încă nu există evaluări
- Digital SystemsDocument675 paginiDigital SystemsvikramjhaÎncă nu există evaluări
- Digital SystemsDocument675 paginiDigital SystemsvikramjhaÎncă nu există evaluări
- Refrigeration and Air Conditioning Mechanic PDFDocument43 paginiRefrigeration and Air Conditioning Mechanic PDFGautham100% (2)
- EE8402 Transmission Line Parameters PDFDocument4 paginiEE8402 Transmission Line Parameters PDFsunil1237Încă nu există evaluări
- DLCDocument35 paginiDLCsunil1237Încă nu există evaluări
- Ee 2352Document8 paginiEe 2352M A InayathullaahÎncă nu există evaluări
- Unit3 (Ac Drives)Document20 paginiUnit3 (Ac Drives)vedala chaitanyaÎncă nu există evaluări
- Be8255 Basic ElectricalDocument2 paginiBe8255 Basic Electricalsunil1237Încă nu există evaluări
- Me6701 Power Plant Engineering Nov-Dec 2015docxDocument2 paginiMe6701 Power Plant Engineering Nov-Dec 2015docxsunil1237Încă nu există evaluări
- Registration Form: Dd/Mm/YyyyDocument1 paginăRegistration Form: Dd/Mm/Yyyysunil1237Încă nu există evaluări
- Ee2254 - Linear Integrated Circuits and Applications April-May 2010Document2 paginiEe2254 - Linear Integrated Circuits and Applications April-May 2010sunil1237Încă nu există evaluări
- Ee 2252 Power Plant Engineering B.eb - Tech. Degree Examination, Aprilmay 2010Document2 paginiEe 2252 Power Plant Engineering B.eb - Tech. Degree Examination, Aprilmay 2010sunil1237Încă nu există evaluări
- Ee 6303 - Linear Integrated Circuits and Applications Nov-Dec 2015Document2 paginiEe 6303 - Linear Integrated Circuits and Applications Nov-Dec 2015sunil1237Încă nu există evaluări
- Ee 6303 - Linear Integrated Circuits and Applications Nov-Dec 2014Document4 paginiEe 6303 - Linear Integrated Circuits and Applications Nov-Dec 2014sunil1237Încă nu există evaluări
- Ee 6303 - Linear Integrated Circuits and Applications April-May 2016Document2 paginiEe 6303 - Linear Integrated Circuits and Applications April-May 2016sunil1237100% (1)
- Vibration: Fundamentals and PracticeDocument19 paginiVibration: Fundamentals and PracticeMuket AgmasÎncă nu există evaluări
- An Introduction To Solvers PLECSDocument66 paginiAn Introduction To Solvers PLECS曾乙申Încă nu există evaluări
- Control System II - Lecture NotesDocument78 paginiControl System II - Lecture Notes34plt34Încă nu există evaluări
- State Variable MethodsDocument55 paginiState Variable MethodsMomi keiraÎncă nu există evaluări
- Paper - An Alternative Paradigm For Control System DesignDocument8 paginiPaper - An Alternative Paradigm For Control System Designkritika bansalÎncă nu există evaluări
- Control Engineering: Dr. Ramkrishna PasumarthyDocument7 paginiControl Engineering: Dr. Ramkrishna PasumarthyVAISHAKA N RAJÎncă nu există evaluări
- Continuous & Discreate Control SystemsDocument71 paginiContinuous & Discreate Control Systemssatishdanu5955Încă nu există evaluări
- NC JaganDocument494 paginiNC JaganSean Zimmerman100% (3)
- Autonomous College Under VTU - Accredited by NBA - Approved by AICTEDocument3 paginiAutonomous College Under VTU - Accredited by NBA - Approved by AICTESureshÎncă nu există evaluări
- Broom BalancerDocument118 paginiBroom BalancerMohamad MagdyÎncă nu există evaluări
- Control System EngineeringDocument3 paginiControl System Engineeringnisarg0% (1)
- Approved Ph. D Coursework Examination Courses Under ECE Board With Course Codes As Per 2020 M. Tech SchemeDocument81 paginiApproved Ph. D Coursework Examination Courses Under ECE Board With Course Codes As Per 2020 M. Tech SchemeNaveenKumarLÎncă nu există evaluări
- Modeling of FACTS Devices Based On SPWM VSCsDocument9 paginiModeling of FACTS Devices Based On SPWM VSCsshehnozmohdÎncă nu există evaluări
- Tests: Implicit CombinationalDocument8 paginiTests: Implicit CombinationalBINOD KUMARÎncă nu există evaluări
- Race Car Damping - Some Food For ThoughtDocument30 paginiRace Car Damping - Some Food For ThoughtDionisis SpiliopoulosÎncă nu există evaluări
- Mechanical Engineering Syllabus Kurukshetra UniversityDocument22 paginiMechanical Engineering Syllabus Kurukshetra Universityjasvindersinghsaggu100% (1)
- B.W. Bequette - Process Dynamics - Modeling, Analysis and SimulationDocument632 paginiB.W. Bequette - Process Dynamics - Modeling, Analysis and SimulationKaren Franke75% (4)
- Math 3Document16 paginiMath 3Anonymous UrzdtCB0IÎncă nu există evaluări
- CRM Modeling MarkovDocument13 paginiCRM Modeling MarkovtomekziomekÎncă nu există evaluări
- Gandhinagar Institute of Technology: Question BankDocument5 paginiGandhinagar Institute of Technology: Question BankvineetanishadÎncă nu există evaluări
- ME PED-Scheme & Syllabus 2018Document21 paginiME PED-Scheme & Syllabus 2018Angamuthu AnanthÎncă nu există evaluări
- MATLAB Course - Part 2Document71 paginiMATLAB Course - Part 2AnamÎncă nu există evaluări
- Linear System Theory and Design: Taesam KangDocument42 paginiLinear System Theory and Design: Taesam KangFiriceNguyenÎncă nu există evaluări
- Exercise 6 - State-Space ModelsDocument6 paginiExercise 6 - State-Space Modelsanass sbniÎncă nu există evaluări
- Continuous Time Control Course As OfferedDocument9 paginiContinuous Time Control Course As OfferedsabrahimaÎncă nu există evaluări
- Lecture 02 AV-356 System ModelingDocument28 paginiLecture 02 AV-356 System ModelingUsama NazirÎncă nu există evaluări
- Module Handbook ESEMA v2 - Stand WISe 2022 23Document134 paginiModule Handbook ESEMA v2 - Stand WISe 2022 23Nishant KadamÎncă nu există evaluări
- Airframe Structural Design (Asd)Document10 paginiAirframe Structural Design (Asd)Salim Omer Bamukra Al-MashjariÎncă nu există evaluări
- Digital Control: Fundamentals: ENGI 7825: Control Systems II Andrew VardyDocument32 paginiDigital Control: Fundamentals: ENGI 7825: Control Systems II Andrew VardyZhraa NorÎncă nu există evaluări
- Microsoft Certified Azure Fundamentals Study Guide: Exam AZ-900De la EverandMicrosoft Certified Azure Fundamentals Study Guide: Exam AZ-900Încă nu există evaluări
- The Compete Ccna 200-301 Study Guide: Network Engineering EditionDe la EverandThe Compete Ccna 200-301 Study Guide: Network Engineering EditionEvaluare: 5 din 5 stele5/5 (4)
- CCNA Certification Study Guide, Volume 2: Exam 200-301De la EverandCCNA Certification Study Guide, Volume 2: Exam 200-301Încă nu există evaluări
- Microsoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsDe la EverandMicrosoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsÎncă nu există evaluări
- Unlock Any Roku Device: Watch Shows, TV, & Download AppsDe la EverandUnlock Any Roku Device: Watch Shows, TV, & Download AppsÎncă nu există evaluări
- PHP BLUEPRINT: An Essential Beginners Guide to Learn the Realms of PHP From A-ZDe la EverandPHP BLUEPRINT: An Essential Beginners Guide to Learn the Realms of PHP From A-ZÎncă nu există evaluări
- Evaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsDe la EverandEvaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsEvaluare: 5 din 5 stele5/5 (1)
- Cybersecurity: The Beginner's Guide: A comprehensive guide to getting started in cybersecurityDe la EverandCybersecurity: The Beginner's Guide: A comprehensive guide to getting started in cybersecurityEvaluare: 5 din 5 stele5/5 (2)
- Set Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPNDe la EverandSet Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPNEvaluare: 5 din 5 stele5/5 (1)
- AWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamDe la EverandAWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamÎncă nu există evaluări
- Cybersecurity: A Simple Beginner’s Guide to Cybersecurity, Computer Networks and Protecting Oneself from Hacking in the Form of Phishing, Malware, Ransomware, and Social EngineeringDe la EverandCybersecurity: A Simple Beginner’s Guide to Cybersecurity, Computer Networks and Protecting Oneself from Hacking in the Form of Phishing, Malware, Ransomware, and Social EngineeringEvaluare: 5 din 5 stele5/5 (40)
- Azure Networking: Command Line Mastery From Beginner To ArchitectDe la EverandAzure Networking: Command Line Mastery From Beginner To ArchitectÎncă nu există evaluări
- Networking Fundamentals: Develop the networking skills required to pass the Microsoft MTA Networking Fundamentals Exam 98-366De la EverandNetworking Fundamentals: Develop the networking skills required to pass the Microsoft MTA Networking Fundamentals Exam 98-366Încă nu există evaluări
- Hacking Network Protocols: Complete Guide about Hacking, Scripting and Security of Computer Systems and Networks.De la EverandHacking Network Protocols: Complete Guide about Hacking, Scripting and Security of Computer Systems and Networks.Evaluare: 5 din 5 stele5/5 (2)
- Hacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxDe la EverandHacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxEvaluare: 4.5 din 5 stele4.5/5 (67)
- AWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamDe la EverandAWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamEvaluare: 5 din 5 stele5/5 (1)
- Alcatel-Lucent Service Routing Architect (SRA) Self-Study Guide: Preparing for the BGP, VPRN and Multicast ExamsDe la EverandAlcatel-Lucent Service Routing Architect (SRA) Self-Study Guide: Preparing for the BGP, VPRN and Multicast ExamsÎncă nu există evaluări
- Open Radio Access Network (O-RAN) Systems Architecture and DesignDe la EverandOpen Radio Access Network (O-RAN) Systems Architecture and DesignÎncă nu există evaluări
- ITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationDe la EverandITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationEvaluare: 5 din 5 stele5/5 (2)